1. College of Information Science and Technology, Shihezi University, Shihezi 832003,China 2. Division of National Remote Sensing Center, Xinjiang Production and Construction Corps, Shihezi 832003, China 3. Geospatial Information Engineering Research Center,Xinjiang Production and Construction Corps, Shihezi 832003, China 4. College of Mechanical and Electrical Engineering, Shihezi University, Shihezi 832003, China
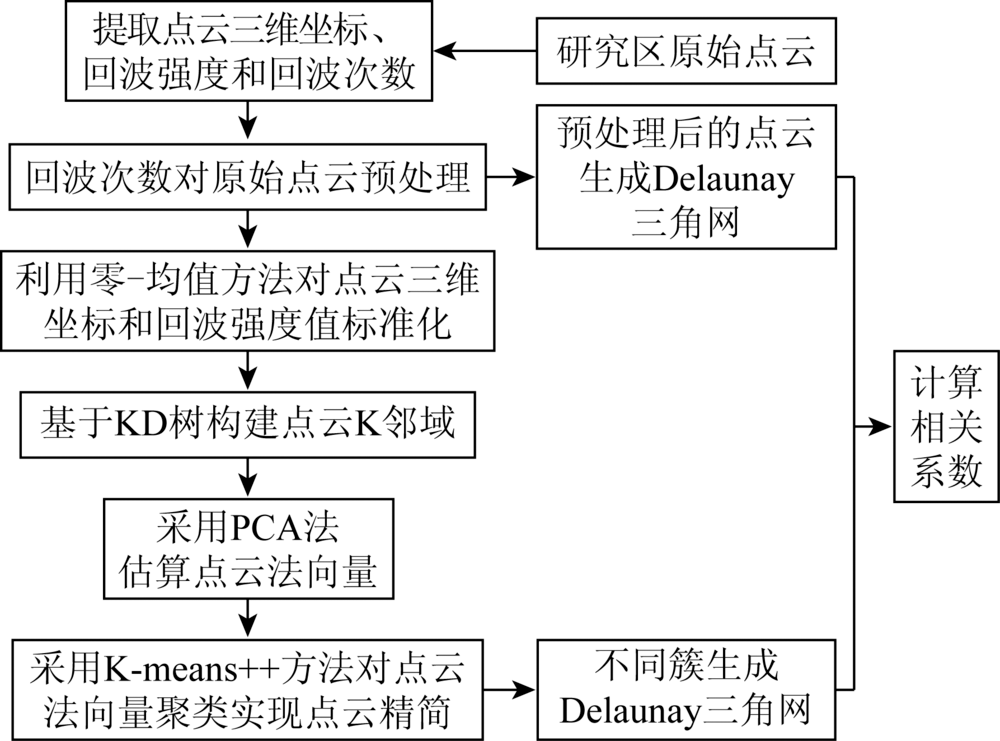
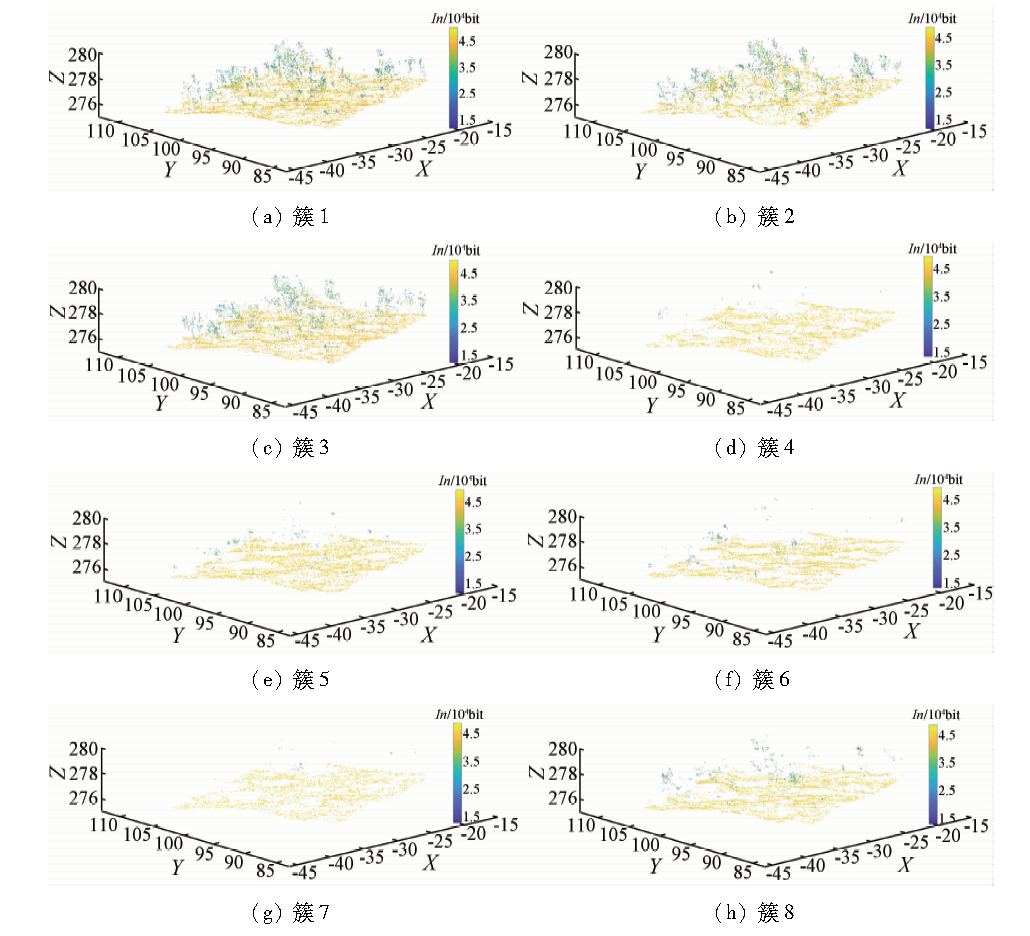
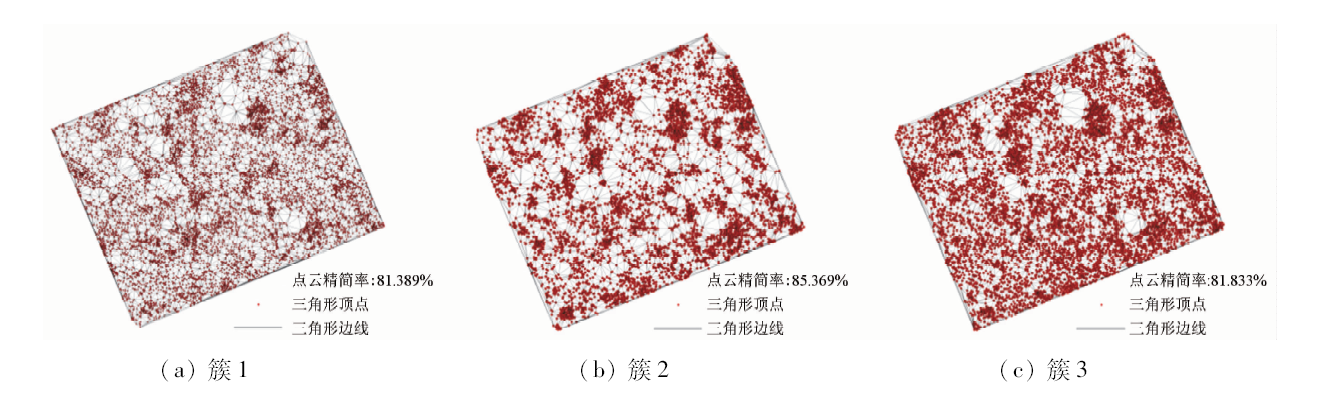
It is important to reduce the amount of unmanned aerial vehicle (UAV) light detection and ranging (LiDAR) data effectively based on point cloud simplification method, and this is of great significance for later point cloud storage and fast processing. The authors used K-means++ method to cluster point cloud normal vectors so as to achieve point cloud simplification. Firstly, the echo point cloud was removed by using the echo number. After that, the zero-mean normalization method was used to normalize the point cloud attribute information, and the KD tree (K-dimension tree) was used to establish the point cloud index so as to construct the point cloud K neighborhood. Then, the principal component analysis method was used to estimate the point cloud normal vector, and the optimal number of clusters was determined by the elbow method. Finally, the point cloud simplification was achieved by K-means++ clustering method. The simplified result was generated into a Delaunay triangulation and converted into raster data, and the validity of the method was verified by the correlation coefficient. The results show that this method can remove 7 722 points of multiple echo point clouds for 69 544 point cloud data in the study area; as for K-means++ clustering with a cluster number of 8 for the point cloud normal vector, the corresponding simplification rates were 81.389%, 81.833% and 85.369%, respectively. The time to generate the Delaunay triangulation after streamlining was much lower than that before the simplifying, with the simplification process being 81.833%, and the highest correlation coefficient was 0.890. This method can provide a reference for point cloud reduction.
Chen J, Xiao C L, Li J. Calibration of airborne LiDAR cloud point data with no calibration field[J]. Remote Sensing for Land and Resources, 2015,27(4):27-33.doi: 10.6046/gtzyyg.2015.04.05.
[2]
Fink C M, Drohan P J. High resolution hydric soil mapping using LiDAR digital terrain modeling[J]. Soil Science Society of America Journal, 2016,80(2):355-363.
Li F X, Rao Y H, Liu C, et al. Point cloud simplification based on angle between normal[J]. Journal of System Simulation, 2012,24(9):1980-1987.
[4]
Zhao P C, Wang Y, Hu Q W. A feature preserving algorithm for point cloud simplification based on hierarchical clustering [C]//36th IEEE International Geoscience and Remote Sensing Symposium.Beijing:IGARSS, 2016: 5581-5584.
Li R Z, Yang M, Liu Y Y, et al. An uniform simplification algorithm for scattered point cloud[J]. Acta Optica Sinica, 2017,37(7):97-105.
[6]
陈龙. 散乱点云特征提取和聚类精简技术研究[D]. 西安:西南科技大学, 2017.
Chen L. Research on feature extraction and clustering simplification of scattered point cloud[D]. Xi’an:Southwest University of Science and Technology, 2017.
[7]
葛源坤. 基于曲率特征信息的散乱点云数据预处理技术研究[D]. 成都:西南交通大学, 2012.
Ge Y K. Research on data pre-processing technology of scattered point cloud based on curvatures feature[D]. Chengdu:Southwest Jiaotong University, 2012.
Chen X J, Zhang G, Hua X H. Point cloud simplification based on the information entropy of normal vector angle[J]. Chinese Journal of Lasers, 2015,42(8):336-344.
[9]
Han H Y, Han X, Sun F S, et al. Point cloud simplification with preserved edge based on normal vector[J]. Optik, 2015,126(19):2157-2162.
doi: 10.1016/j.ijleo.2015.05.092
Su B Y, Ma J Y, Peng Y S, et al. Algorithm for RGBD point cloud denoising and simplification based on K-means clustering[J]. Journal of System Simulation, 2016,28(10):2329-2341.
[11]
唐林. 三维点云数据精简与压缩的研究[D]. 南京:东南大学, 2017.
Tang L. Research on 3D point cloud data simplification and compression[D]. Nanjing:Southeast University, 2017.
[12]
Li X D, Li W, Jiang H Z, et al. Automatic evaluation of machining allowance of precision castings based on plane features from 3D point cloud[J]. Computers in Industry, 2013,64(9):1129-1137.
doi: 10.1016/j.compind.2013.06.003
Li L L, Jiang W S, Guo C F. Classification of LiDAR point clouds in urban areas based on the analysis of regional multi-return density[J]. Remote Sensing for Land and Resources, 2015,27(2):29-35.doi: 10.6046/gtzyyg.2015.02.05.
[14]
Cai Z P, Wang C, Wen C L, et al. Occluded boundary detection for small-footprint ground borne LiDAR point cloud guided by last echo[J]. IEEE Geoscience and Remote Sensing Letters, 2015,12(11):2272-2276.
doi: 10.1109/LGRS.8859
[15]
Visalakshi N K, Thangavel K. Impact of normalization in distributed K-means clustering[J]. International Journal of Soft Computing, 2009,4(4):168-172.
Fan L, Liu J H, Huang Q Q. Point cloud segmentation algorithm based on feature fusion used for understory environments[J]. Journal of Beijing Forestry University, 2016,38(5):133-138.
Cai Z M, Wang Y M, Huang M. Guass mean curvature reduction algorithm based on KD tree scattered point cloud data[J].Bulletin of Surveying and Mapping, 2013(s1):44-46.
[18]
彭占伟. 基于K近邻的点云数据处理研究[D]. 昆明:昆明理工大学, 2014.
Peng Z W. Research on point cloud data processing based on K-nearest neighbor[D]. Kunming:Kunming University of Science and Technology, 2014.
[19]
陈永辉. 基于激光扫描的三维点云数据处理技术研究[D]. 北京:中国科学技术大学, 2017.
Chen Y H. Research on data processing techniques based on laser scanning 3D point clouds[D]. Beijing:University of Science and Technology of China, 2017.
Xing Z Q, Deng K Z, Xue J Q. Point cloud data compression based on grid division and normal vector estimation[J].Bulletin of Surveying and Mapping, 2012(7):50-52.
Zhao Y, Zhou P. An improved K-means algorithm for remote sensing classification[J]. Remote Sensing for Land and Resources, 2011,23(2):87-90.doi: 10.6046/gtzyyg.2011.02.16.
[23]
Sebastian Raschka. Python machine learning[M] //Beijing: China Machine Press, 2015.
Zhang S J, Zhao H C. Application research of computers study on the optimal number of clusters and the selection algorithm of initial cluster centers[J]. Application Research of Computers, 2017,34(6):1617-1620.
[25]
Yang Z, Liu X, Hu Z W, et al. Seamless service handoff based on Delaunay triangulation for mobile cloud computing[J]. Wireless Personal Communications, 2017,93(3):795-809.
doi: 10.1007/s11277-014-2229-6
 2020, Vol. 32
2020, Vol. 32  ), 田文忠2,3,4, 马永建1,2,3
), 田文忠2,3,4, 马永建1,2,3