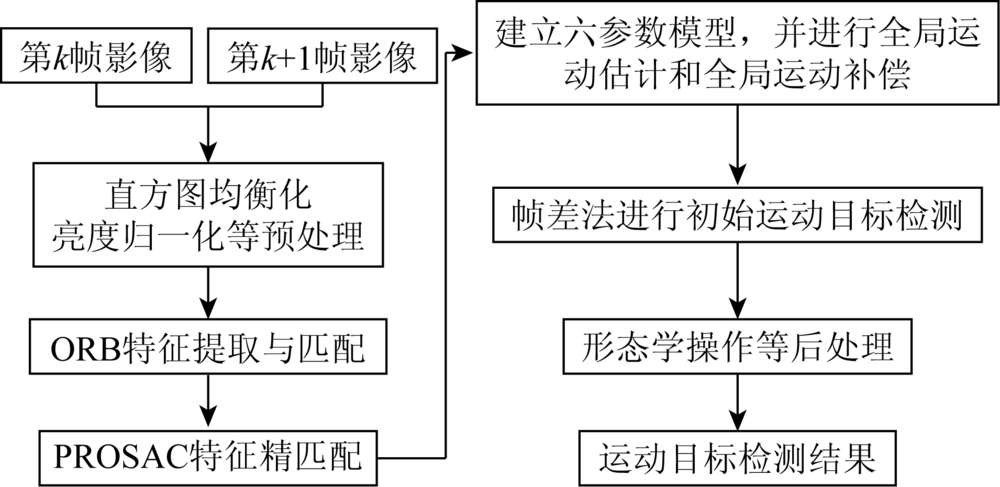
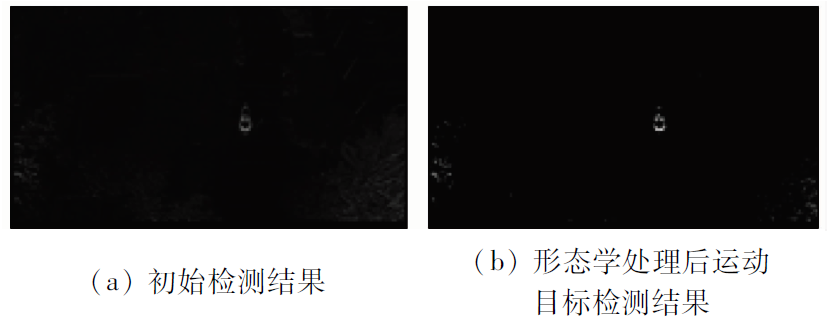
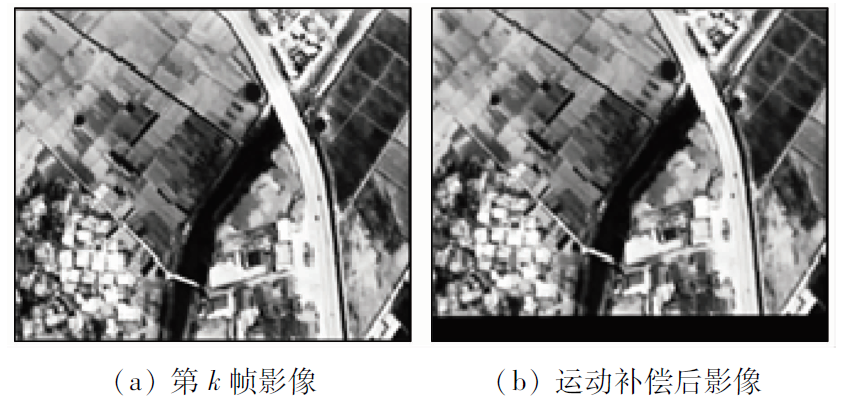
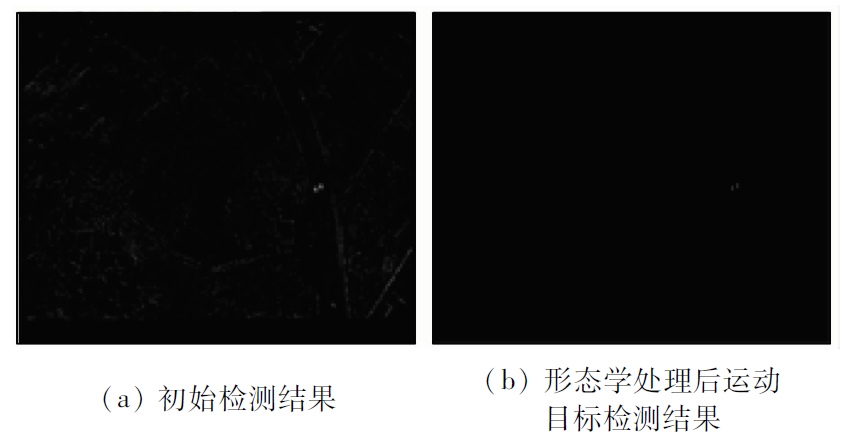
针对无人机载视频序列影像动态背景以及常用检测方法处理效率不高等问题,提出了一种基于特征的无人机载视频运动目标快速检测方法。该方法主要包括预处理、ORB特征提取(oriented fast and rotated BRIEF, ORB)、渐进一致采样(progressive sample consensus, PROSAC)特征精匹配、全局运动估计与全局运动补偿、运动目标初检测和形态学后处理等6个步骤。通过2组无人机载视频数据实验研究表明: 对不同传感器获取的不同帧率和不同尺寸大小的视频序列影像,采用本方法的运动目标检测结果较好,计算效率最高,且能够满足实时处理需求。
Aiming at tackling the problem of the low efficiency of common detection methods and the dynamic background of UAV-based video sequences imagery, this paper proposes a fast detection method for moving targets in UAV video based on the feature extraction. The method mainly includes six steps, i.e., preprocessing, ORB feature extraction, PROSAC feature fine matching, global motion estimation and global motion compensation, initial detection of moving target and morphological post-processing. The results of two video experiments carried by UAVs show that the moving target detection results of the proposed method in this paper are better, the computational efficiency is the highest, and hence this method can meet the requirements of real-time processing.
谭熊, 王晶磊, 孙一帆. 基于特征的无人机载视频运动目标快速检测方法[J]. 国土资源遥感, 2021, 33(2): 27-32.
TAN Xiong, WANG Jinglei, SUN Yifan. A fast detection method for moving targets in UAV video based on the feature extraction. Remote Sensing for Land & Resources, 2021, 33(2): 27-32.
Mu Y W, Guo C H, Xin Y D. A new interframe difference algorithm for moving target detection[C]// IEEE International Congress on Image and Signal Processing, 2010(1):285-289.
[2]
熊英. 基于背景和帧间差分法的运动目标提取[J]. 计算机时代, 2014(3):38-41.
Xiong Y. Moving object extraction based on background difference and frame difference method[J]. Computer Era, 2014(3):38-41.
[3]
Kengo M, Takashi S, Shoji Y, et al. Moving-object detection method for moving cameras by merging background subtraction and optical flow methods[C]// IEEE Global Conference on Signal and Information Processing, 2017:383-387.
[4]
谭熊. 基于光流分析的无人机视频运动目标检测与跟踪[D]. 郑州:解放军信息工程大学, 2011.
Tan X. UAV video moving target detection and tracking based on optical flow analysis[D]. Zhengzhou:Information Engineering University, 2011.
[5]
王朋月. 基于全局运动估计补偿的目标检测算法研究[D]. 北京:北京工业大学, 2018.
Wang P Y. Research on target detection algorithm based on global motion estimation and compensation[D]. Beijing:Beijing Industry University, 2018.
Lu Y Q, Sun J Y, Ma S W. Moving object detection based on deep convolutional neural network[J]. Journal of System Simulation, 2019, 31(11):2275-2280.
[7]
Ren S, He K, Gir S R, et al. Faster R-CNN:Towards real-time object detection with region proposal networks[J]. IEEE Trans Pattern Anal Mach Intell, 2015, 39(6):1137-1149.
doi: 10.1109/TPAMI.2016.2577031
[8]
Redmon J, Divvala S, Girshick R, et al. You only look once:Unified,real-time object detection[C]// IEEE Conference on Computer Vision and Pattern Recognition.IEEE, 2016:779-778.
[9]
Liu W, Anguelov D, Erhan D, et al. SSD:Single shot multi-box detector[C]// European Conference on Computer Vision,Amsterdam.IEEE, 2016:21-37.
[10]
任霞. 基于无人机视频的运动目标检测与跟踪方法研究[D]. 成都:电子科技大学, 2020.
Ren X. Research of detection and tracking based on the moving targets in UAV video[D]. Chengdu:University of Electronic Science and Technology of China, 2020.
[11]
陈挺. 无人机对地运动目标跟踪技术研究[D]. 西安:西北工业大学, 2018.
Chen T. Moving objects tracking in aerial videos[D]. Xi’an:Northwestern Polytechnical University, 2018.
Dong J, Fu D, Yang X, et al, Real-time moving object detection and tracking by using UAV videos[J], Applied Optics, 2013, 34(2):255-259.
[13]
Rublee E, Rabaud V, Konolige K, et al. ORB:An efficient alternative to SIFT or SURF[C]// Proceedings of IEEE International Conference on Computer Vision, Washington,USA, 2011:2564-2571.
[14]
Mair E, Hager G D, Burschka D, et al. Adaptive and generic corner detection based on the accelerated segment test[C]// Proceeding of European Conference on Computer Vision,Crete,Greece, 2010, 63(12):183-196.
[15]
Calonder M, Lepetit V, Fua P. BRIEF:Binary robust independent elementary features[C]// Proceeding of European Conference on Computer Vision,Crete,Greece, 2010, 63(14):778-792.
[16]
Fischler M A. Random sample consensus:A paradigm for model fitting with applications to image analysis and automated cartography[J]. Readings in Computer Vision, 1987:726-740.
[17]
Chum O. Matching with PROSAC—Progressive Sample Consensus[J]. Processing of Conference on CVPR, 2005, 1(2):220-226.
 2021, Vol. 33
2021, Vol. 33  ), 王晶磊, 孙一帆
), 王晶磊, 孙一帆