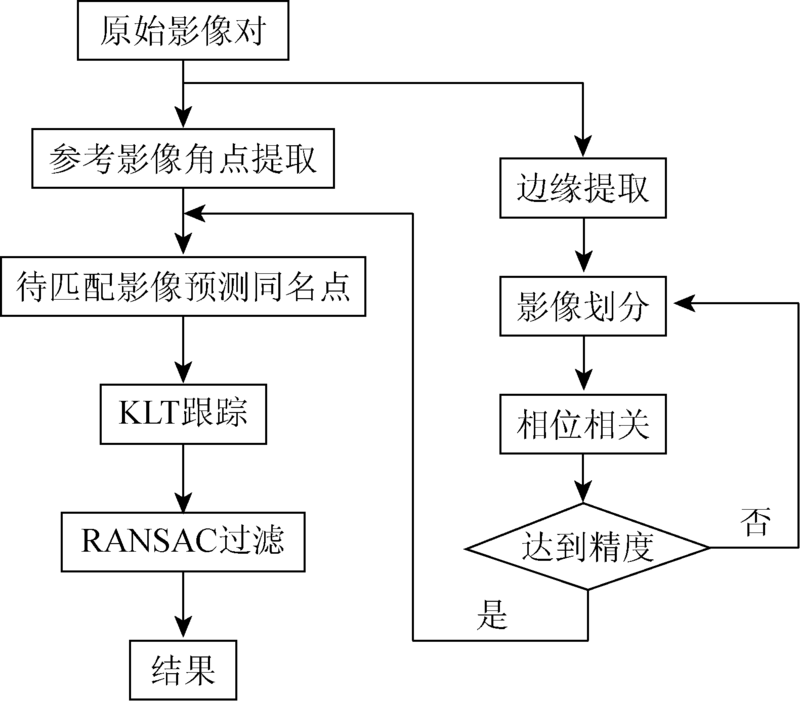
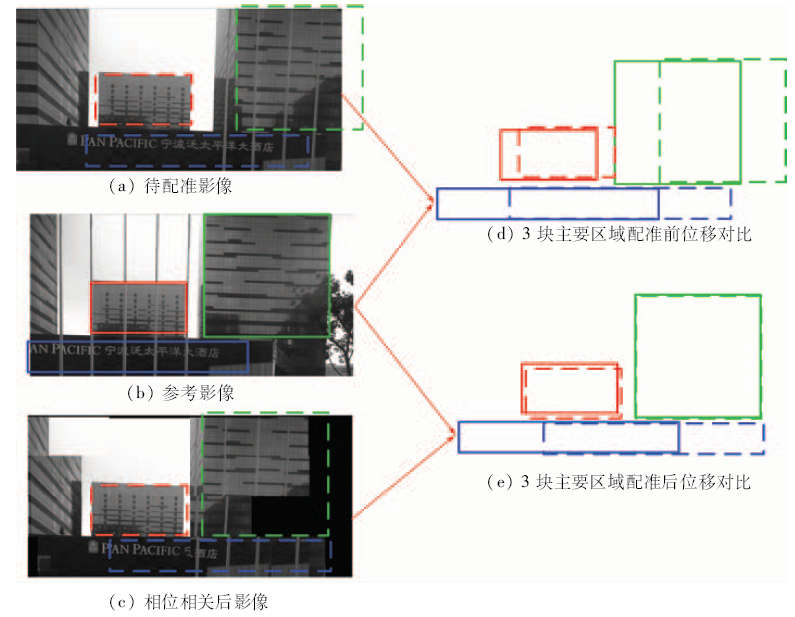
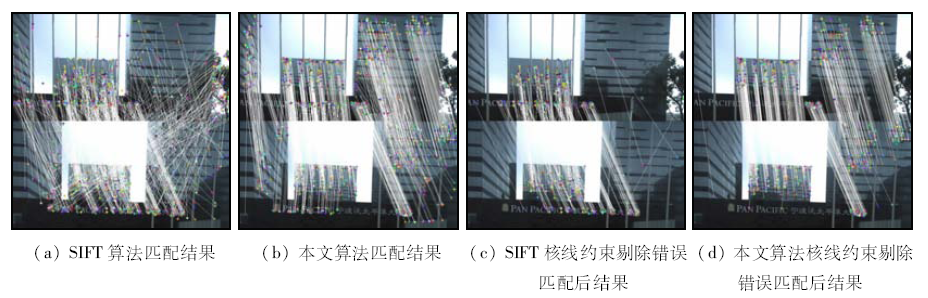
Building facade is the main content of street images captured by mobile measurement system and contains a lot of regular repeating textures. Applying feature matching algorithm to such images may cause a lot of false matches, which seriously affect the later image orientation and three-dimensional reconstruction. To solve this problem, this paper proposes a phase correlation supported KLT (Kanade-Lucas-Tomasi)feature track-matching algorithm. Firstly, phase correlation algorithm was applied from global to local scale to get crude registration. Then the KLT algorithm was used to track the corners at each matched area. The experimental results show that, when match between building dense street images, the algorithm proposed have a greater increase than pure feature matching algorithm in correct matching rate, and the distribution of features is relatively uniform, which can effectively solve the feature matching problem of street images with regular repeating textures.
Lowe D G.Distinctive image features from scale-invariant keypoints[J].International Journal of Computer Vision,2004,60(2):91-110.
[2]
Bay H,Ess A,Tuytelaars T,et al.Speeded-up robust features(SURF)[J].Computer Vision and Image Understanding,2008,110(3):346-359.
[3]
Ke Y,Sukthankar R. PCA-SIFT:A more distinctive representation for local image descriptors[C]//Proceedings of the 2004 IEEE Computer Society Conference on Computer Vision and Pattern Recognition.Washington,DC:IEEE, 2004, 2:II-506-II-513.
[4]
Morel J M,Yu G S.ASIFT:A new framework for fully affine invariant image comparison[J].SIAM Journal on Imaging Sciences,2009,2(2):438-469.
He H Q,Zhang Y J,Huang S X.Phase correlation supported low altitude images matching with repeated texture[J].Geomatics and Information Science of Wuhan University,2014,39(10):1204-1207.
Zhang J,Hu Z P,Liu Z T,et al.Image automatic mosaics based on contour phase correlation[J].Journal of Dalian University of Technology,2005,45(1):68-74.
Luo R W,Chen X W.The algorithm of cylindrical panorama mosaicing for 360° image sequence[C]//The 2nd Joint Conference On Harmonlous Human Machine Environment(NCMT2006, CHCI2006 and PCC2006).Hangzhou:China Computer Federation,2006:95-101.
[10]
Lucas B D,Kanade T. An iterative image registration technique with an application to stereo vision[C]//Proceedings of the 7th International Joint Conference on Artificial Intelligence.Vancouver, BC,Canada:Morgan Kaufmann Publishers Inc.,1981(2):674-679.
[11]
Shi J B,Tomasi C.Good features to track[C]//Proceedings of 1994 IEEE Computer Society Conference on Computer Vision and Pattern Recognition.Seattle,WA,USA:IEEE,1994:593-600.
[12]
Bouguet J Y.Pyramidal implementation of the Lucas Kanade feature tracker description of the algorithm[J].Acta Pathologica Japonica,2000,22(2):363-381.
 2018, Vol. 30
2018, Vol. 30  ), 龚珣, 谢洪
), 龚珣, 谢洪