

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
基于特征点与边界信息的全自动多模态遥感图像配准方法
[宋智礼 ]
]
]
|
|


作者简介: 宋智礼(1974-),男,博士,讲师,主要研究遥感图像配准方法等。Email:zlsong@fudan.edu.cn。
多模态遥感图像在光谱成分上的巨大差异,导致点特征检测与匹配算法在该类图像配准中的正确匹配率非常低。为了提高尺度不变特征变换和加速鲁棒性特征算法在图像配准时的可靠性和鲁棒性,提出了一种多模态遥感图像配准的新方法。该方法既能利用复杂轮廓中蕴含的几何变换信息弥补点特征在多模态图像配准中的缺点,又能利用点特征所蕴含正确匹配区域的启发性信息克服边界匹配算法的不足。结果表明: 该方法能够在完全无人参与的情况下,全自动地实现多模态遥感图像的配准,并且具有较高的稳健性和可信度。
Due to the significant spectral difference in multimodal image registration, the rate of correctly matched feature-points calculated with point-feature detecting and matching algorithms, such as speed up Robust features,SURF, is quite low in some difficult cases. In order to solve this issue, this paper proposes a novel image registration approach with the help of point and curve features. It adopts the location information indexed by the correct matching pair of feature-points and transformation information determined by the pair of correct matching curves simultaneously. Also, the feasibility and advantages of this algorithm were all confirmed by the experiments in this paper. The results show that this method can achieve automatically the registration of the multi-modal remote sensing images in the completely unattended case and align some kinds of remote sensing images automatically. In addition, it is more robust and reliable.
图像配准在很多领域具有重要的应用价值[1, 2], 特别是在多源图像处理中[3, 4]。它是将不同时间、不同传感器(成像设备)或不同条件下(天候、照度、摄像位置和角度等)获取的2幅或多幅图像进行匹配和叠加的过程, 其主要任务是找到待配准图像间最优的几何变换, 从而使得变换后的图像相对于一种相似度量函数具有最大相似性。
根据不同的分类标准, 图像配准算法可以分为很多种类, 如根据图像配准所利用的信息类型, 可将图像配准算法分为基于灰度信息[5, 6]和基于特征[7, 8, 9]的图像配准算法。这2类图像配准方法的主要区别为: 前者主要是利用一种相似度量函数来寻找2幅图像之间匹配的灰度模式信息; 而后者主要利用待配准图像当中共有的特征信息(包括点、线、区域等等)进行匹配, 相对于前者它还具有很多优点。各种各样基于特征的图像配准方法, 虽然在使用特征和实现方法上有很大差别, 但每种方法都包含4个步骤[10]: ①特征检测, 选定一种特征检测算法, 分别从基准图像与浮动图像中检测出2组特征; ②特征匹配, 选定用于衡量特征匹配程度的相似度量函数, 计算出2组特征之间的特征匹配队列; ③参数估计, 选定参数估计算法, 根据特征匹配队列, 计算几何变换模型的参变量; ④图像配准, 选定重采样算法, 依据估算出的几何变换参数, 将浮动图像映射到基准图像的坐标系, 完成图像的配准操作。
完全无人参与的全自动图像配准技术是图像配准研究的目标[11, 12], 在自动配准图像存在较大几何变形的情况下, 特征匹配是常用算法, 包括点特征匹配算法、边界特征匹配算法及区域特征匹配算法等。其中, 点特征匹配算法比较成熟且被广泛使用, 包括尺度不变特征变换(scale-invariant transform, SIFT)[13]和加速鲁棒性特征(speed up robust features, SURF)[14]算法。SIFT和SURF常受制于多模态图像之间灰度上的巨大差异[15, 16], 从而使点特征的正确匹配率非常低, 影响了算法的稳定性。针对上述情况, 本文综合利用图像中轮廓蕴含的几何变换信息, 提出一种即使在点特征正确匹配率非常低的情况下也可稳定运行的全自动图像配准算法。该算法将点特征与轮廓特征有机结合起来, 有效克服了它们各自的缺点, 从而实现了适用于多模态遥感图像的、完全无人参与的全自动图像配准算法。经实验证明, 本文提出的算法适用于多模态遥感图像配准, 且具有更高的稳健性和可信度。
如图1所示, (pr, ps)是一对相互匹配的特征点对; Lr是特征点pr附近的一条轮廓线; Ls是特征点ps附近的一条轮廓线。
前提: 任何一对匹配的特征点对(pr, ps)及其附近的一对匹配曲线(Lr, Ls)。
结论: 可以估算出特征点对(pr, ps)周围的局部几何变换参数; 依据本文提出的判断准则, 可以判断特征点对(pr, ps)匹配的正确性。
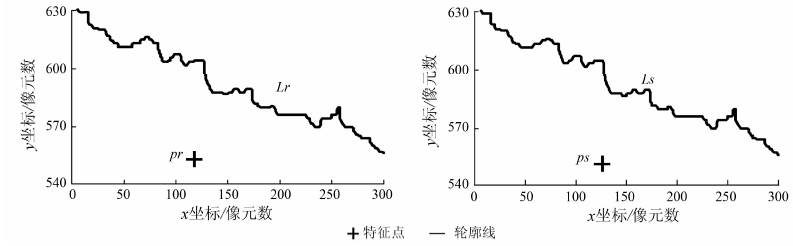 | 图1 匹配特征点与轮廓线Fig.1 A pair of matching feature-points and the corresponding contours |
对于一个顶点分别为pb(xb, yb), pm(xm, ym)与pe(xe, ye)的三角形, 其广义面积(triangle area, TAR)定义为
TAR(pb, pm, pe)=
它是仿射变换的一个相对不变量[17]。
计算曲线TAR签名的示意图(图2)中, p
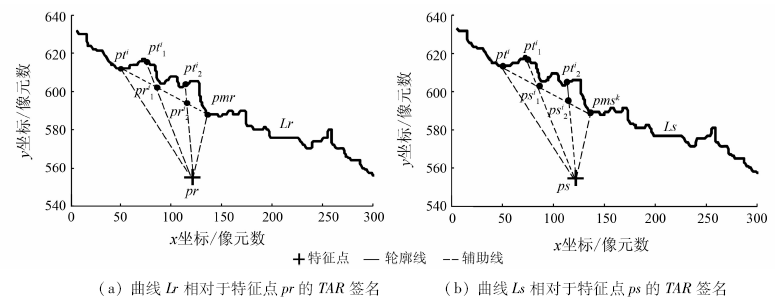 | 图2 计算曲线相对于特征点的TAR签名的示意图Fig.2 Schematic for calculating TAR representation of curve with respect to a feature-point |
算法的具体步骤如下:
1)点pmr为边Lr上的各点p到点pr的欧氏距离最近的点(图2(a)), 即
pmr=
式中dL2为欧氏距离。同样计算边Ls上的各点p到点ps的欧氏距离最近的点(图2(b)), 即
pms=
2)按照
SL=
计算曲线Lr相对于点pr的TAR签名SL(图2(a))。式中: lct为曲线Lr上点的个数; pti为曲线Lr上第i个点。
3)给定阈值l0, 计算点集pmsG, 即
pmsG={p|p∈ Ls,
4)计算曲线Ls相对ps和点集pmsG的TAR签名集
式中: n为点集pmsG中点的个数; 对于每一点pmsk∈ pmsG, 相对点ps和pmsk, 按照
计算曲线Ls相对点ps和pmsk的TAR签名
5)计算曲线Lr的TAR签名曲线的极值点。
6)计算曲线Ls的TAR签名集的所有极值点。
7)根据这些极值点集之间的对应关系, 计算出曲线Lr和Ls几何变换模型的参变量的候选值集。
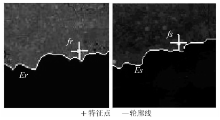
给定相互匹配的特征点对(fr, fs)及其对应的2条相互匹配的轮廓曲线(Er, Es), 如图3所示。
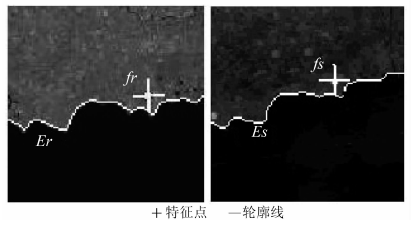 | 图3 正确匹配的特征点及其对应的曲线轮廓Fig.3 A pair of matched feature points and a pair of matched contours |
图3中, Er={
分别计算曲线Lr相对点fr与曲线Ls相对点fs的TAR签名, 式中:
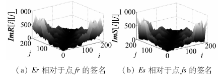
图4(a)是曲线Er相对点fr的TAR签名三维示意图, 图4(b)是曲线Es相对点fs的TAR签名三维示意图, 它们分别看作为广义的图像ImR与ImS。
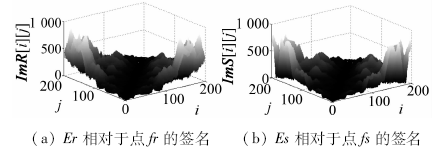 | 图4 曲线相对一点的TAR签名图像的三维示意图Fig.4 3D schematic of curves’ TAR representation with respect to a feature-point |
图4中, i, j在图像ImR(或ImS)中分别是行与列的坐标, 也是位于轮廓Er(或Es)上点的下标。对于图像ImR上的点(i, j), 同时对应基准图像中由pr,
本文提出的用于评价一对匹配曲线吻合程度的标准能准确地判断对应特征点对匹配的正确性。具体为: 给定几何变换ψ ∈ Ψ , 其反变换可记为ψ -1, 其中Ψ 是根据匹配曲线计算得到的几何变换模型参变量的候选值集。对任一点pr∈ Er, 便有满足条件
的一点与其对应。式中:
R={ImR[i][j]|0≤ i, j≤ n} , (10)
S={ImS[i][j]|0≤ i, j≤ m} , (11)
式中: p(vr)与p(
C(fr, fs, Er, Es, ψ )=
C(fs, fr, Es, Er, ψ -1)=
式中: H(R)与H(S)可以根据
H(Z)=-
计算, 其中Z=R, S; I(R, S)和I(S, R)的定义分别为
I(R, S)=
I(S, R)=
对于匹配特征点对(fr, fs)及其对应的轮廓曲线(Er, Es), 给定阈值ξ , 如果有几何变换ψ 满足条件
则可以断定该特征点对为正确匹配, 该几何变换能够很好地近似它们附近区域内的几何变换。
本文提出的图像配准方法具体实现过程如下:
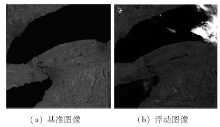
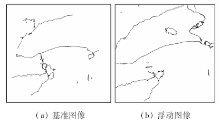
1)输入基准图像(图5(a))和浮动图像(待配准图像, 图5(b))。
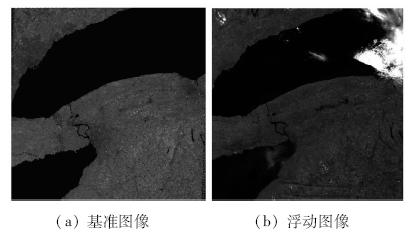 | 图5 待配准图像Fig.5 Images to be registered |
2)利用图像分割和边界提取算法, 分别从基准图像和浮动图像中提取边界集合(图6)。分别将基准图像边界上的点集和浮动图像边界上的点集记为
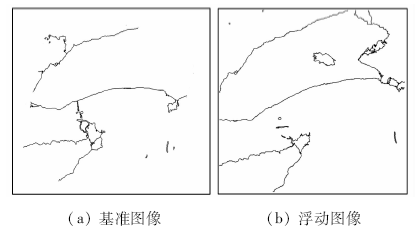 | 图6 提取的边界和轮廓Fig.6 Extracted boundary and contours |
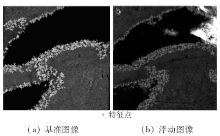
3)利用特征点检测和匹配算法, 从图5(a)(b)中检测特征点集, 分别记为f
C
C
式中: fr为f
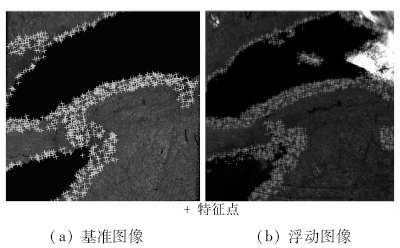 | 图7 提取的轮廓和特征点Fig.7 Extracted contours and the feature points |
4)分别计算检测到的特征点集C
5)对排在队列前面的每一对匹配特征点, 计算匹配特征点对及其对应轮廓决定的几何变换模型参变量的候选值集。
6)利用判断标准, 判断这对特征点对匹配的正确性, 直至找到一对正确匹配的特征点及正确的几何变换。
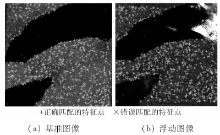
7)根据步骤6计算得到的粗糙几何变换参数值作为启发信息, 重新检测并计算相应的特征点对, 并用迭代方法计算出密集的、正确匹配的特征点对, 结果如图8所示。
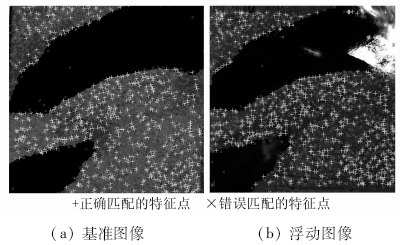 | 图8 密集的正确匹配特征点对Fig.8 Clusters of dense correct matching feature points |
8)利用选定的相似度量函数进行基准图像和浮动图像间的精配准。
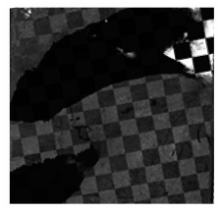
9)根据精配准得到的几何变换参数, 对2景图像中的1景图像进行重采样, 并映射到另一图像的坐标空间, 完成图像配准, 其配准结果如图9所示。
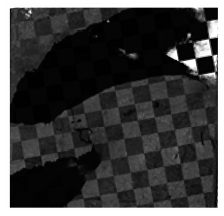 | 图9 配准后的镶嵌图像Fig.9 Mosaic image after registration |
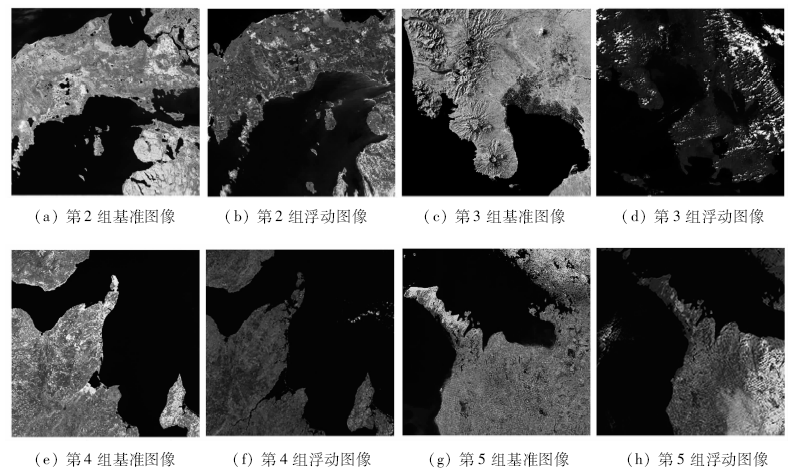
本实验所用遥感图像数据分别如图5和图10所示, 选自USGS Project和NASA/JPL的遥感图像, 其图像大小、经纬度、空间分辨率以及成像设备的详细信息见表1。
| 表1 测试图片集详细信息 Tab.1 Details of the test images |
验证本文提出的方法在多模态遥感图像配准中, 综合利用特征点与轮廓信息后, 对特征点检测和匹配算法性能上有所改进。
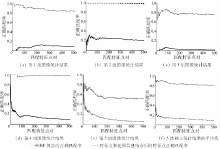
在利用特征点匹配方法计算几何变换参变量值的过程中, 要将匹配特征点对按照它们的相似程度, 从大到小进行排列。由于排在队列前面特征点对的正确匹配率决定着估计几何变换参数值的成败, 因此本文实验只统计排在队列前面500对匹配特征点对的正确匹配率C(N), 其计算公式为
C(N)=Nr/N , (20)
式中Nr为排在队列前面N对匹配特征点对中匹配正确的特征点对数。
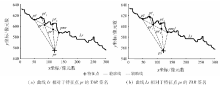
实验统计结果如图11所示, 其中实曲线为SURF算法的正确匹配率, 虚曲线为将特征点和轮廓信息结合起来后的特征点正确匹配率。图11(a)— (e)是每一组图像的特征点正确匹配率统计结果, 图11(f)是上述5次独立统计结果的平均值。
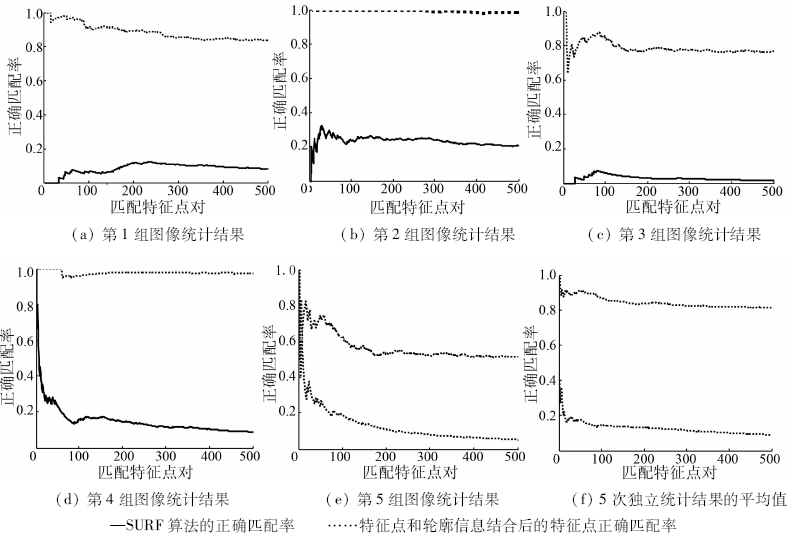 | 图11 SURF与本文提出算法的正确匹配率曲线Fig.11 Curves of correct matching rate from SURF and method proposed in this paper, respectively |
由以上实验可以看出, SURF算法的正确匹配率低于30%, 其主要原因是受图像多模态性的影响。而本文方法的特征点正确匹配率之所以高于80%的主要原因是综合利用了特征点和轮廓信息, 因而极大地提高了在多模态遥感图像配准中的稳定性和可靠性。
1)本文主要研究了基于特征的图像配准方法, 在综合分析特征点检测匹配算法在多模态遥感图像配准应用中存在不足的基础上, 提出了一种能够综合利用特征点信息和图像中轮廓信息的图像配准新方法, 有效提高了图像特征点的正确匹配率。
2)本文的主要贡献在于: 利用曲线相对于一点的TAR签名实现了多模态遥感图像配准方法; 提出了一种利用轮廓信息有效地判断正确匹配特征点对的目标函数。
The authors have declared that no competing interests exist.
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
|
| [17] |
|