

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
基于影像交叉学习的CBERS CCD波段模拟
引用本文
俞乐, 曹凯, 吴飏, 张登荣. 基于影像交叉学习的CBERS CCD波段模拟[J]. 国土资源遥感, 2011,23(3): 48-53
YU Le, CAO Kai, WU Yang, ZHANG Deng-rong. Using Cross-sensor Image Learning for CBERS CCD Bands Simulation[J]. REMOTE SENSING FOR LAND & RESOURCES,2011,23(3): 48-53
Permissions
YU Le, CAO Kai, WU Yang, ZHANG Deng-rong. Using Cross-sensor Image Learning for CBERS CCD Bands Simulation[J]. REMOTE SENSING FOR LAND & RESOURCES,2011,23(3): 48-53
Copyright©2011, 《国土资源遥感》编辑部
《国土资源遥感》编辑部
基于影像交叉学习的CBERS CCD波段模拟
第一作者简介: 俞 乐(1982-),男,博士,主要从事多源遥感数据处理与遥感地质研究。
摘要
与TM/ETM+相比,CBERS CCD缺少2个红外波段(波段5和波段7),这便导致了许多针对TM/ETM+数据的图像处理方法难以直接应用于CBERS CCD图像。为此,采用基于影像交叉学习的波段模拟方法,即以ETM+数据作为先验知识,通过支持向量回归(Support Vector Regression,SVR),拟合CBERS CCD与ETM+7波段DN值之间的非线性关系,进而在CBERS CCD已有波段的基础上模拟一个新的波段图像。实验结果表明,采用该方法模拟的CBERS CCD新波段与验证波段之间具有较高的相关性。
关键词:
波段模拟; 机器学习; SVR; CBERS CCD; TM/ETM+
中图分类号:TP751.1
文献标志码:A
文章编号:1001-070X(2011)03-0048-06
Using Cross-sensor Image Learning for CBERS CCD Bands Simulation
Abstract
The absence of two infrared bands (i.e. 1.55~1.75 μm (TM 5) and 2.08~2.35 μm (TM 7)) in CBERS CCD camera compared with Landsat TM/ETM+ results in a limitation that many algorithms developed for TM/ETM+ images are not applicable for CBERS CCD camera data directly. In this paper, a cross-sensor image learning approach is used to simulate new Landsat-like infrared bands so as to extend spectrum coverage for CBERS CCD camera data. A support vector regression (SVR) technique is used to model nonlinear relationship between a priori knowledge from ETM+ DN values and four CBERS CCD bands, and then new CBERS CCD bands are predicted. Experimental result shows good correlation between simulated band and corresponding ETM+ band.
Keyword:
Band simulation; Machine learning; Support Vector Regression (SVR); China-Brazil Earth Resource Satellite (CBERS) CCD; TM/ETM+
0 引言
中巴地球资源卫星(China-Brazil Earth Resources Satellite, CBERS)系列(CBERS-01、CBERS-02、CBERS-02B)已分别于1999年10月、2003年10月、2007年9月发射。该系列卫星提供了类似Landsat TM和SPOT卫星的波段设置, 为我国开展资源、环境及灾害等领域的遥感应用研究提供了新的数据源[1]。但是, 一个制约CBERS CCD数据应用的原因是CCD相机设置的波段较少、光谱分辨率有限, 因此地物识别能力受到限制[2]。
实现光谱维的扩展可以采用波段模拟技术, 即利用近似时间、近似分辨率的不同类型遥感数据进行波段模拟拓展, 以生成不同时间、不同分辨率、同波段设置的不同类型的遥感数据。由于Landsat TM/ETM+和CBERS CCD这两个系列卫星影像具有近似的波段设置、近似的空间分辨率以及稳定的获取周期, 因此可以采用Landsat系列数据对CBERS系列数据进行光谱维扩展。但是, CBERS CCD和Landsat TM/ETM+的成像特性不同, 载荷的轨道高度(Landsat 705 km, CBERS 778 km)、倾角(Landsat 98.22° , CBERS 98.5° )、过境日期和时间等多项物理、几何参数均不一致, 因此难以仅采用线性的统计模型来拟合波段之间的复杂关系。
本文针对CBERS CCD相机波段设置的不足, 采用非线性影像交叉学习的波段模拟方法, 即参考Landsat TM/ETM+数据模拟CBERS CCD相机没有设置的波段, 从而生成CBERS的中红外波段(以模拟光谱范围2.08~2.35 μ m的ETM+7波段为例), 并对其模拟质量进行验证。
1 CBERS CCD波段扩展方法
1.1 CCD数据质量改进和现存不足
自CBERS-01星发射以来, 为了提高CBERS系列数据的应用价值, 我国已经开展了大量数据质量评价, 并开发了许多有效的质量改善方法。例如, 为了提高CBERS CCD数据定量研究价值, 中国资源卫星应用中心自2004年开始在敦煌绝对辐射校正场开展了CBERS-02/02B CCD传感器的辐射定标实验, 提供了CBERS-02(2004年8月、2005年8月及2006年8月)和CBERS-02B(2007年10月、2008年10月)星传感器的绝对辐射定标参数[3]。同时, 也有采用与SPOT HRVIR1图像、Landsat TM图像及MODIS图像等的交叉定标[4, 5, 6]。在改善影像质量方面, 采用CCD相机三片阵列色差调整方法消除图像的片间色差, 采用调制传递函数(Modulation Transfer Function, MTF)补偿来提高图像清晰度; 在改善几何精度方面, 通过将精轨数据代替星上下传的辅助数据进行几何纠正, 并构造合适的偏置矩阵, 使几何纠正精度有了较大的提高, CBERS-01/02星CCD图像几何定位精度基本控制在1 km以内[7]。
但CBERS CCD相机采用了和SPOT VHR一致的波段设置, 而与TM/ETM+数据相比, 则缺少1.55~1.75 μ m(TM5)和2.08~2.35 μ m(TM7)两个红外波段, 虽然其红外多光谱扫描仪 (IRMSS)提供了这两个波段, 但其空间分辨率较低(78 m), 使其在地质应用领域受到一定的限制。
1.2 CCD 波段模拟
遥感数据的应用潜力取决于传感器本身的空间分辨率、光谱分辨率、光谱波段设置, 以及搭载平台的重访周期等多项技术指标。为了提高地物识别精度, 通常需要采用多种足够高分辨率(包括空间、光谱、时间等)的遥感图像。但事实上, 由于受大气影响和传感器观测条件的限制(如传感器的几种客观性能指标是相互制约的, 在传感器研制水平一定的情况下, 在同一遥感载荷中难以实现所有客观性能指标的最优化), 无法获得足够遥感数据用以满足科学研究中对特定分辨率的需要[11]。为了生成某些卫星传感器不能获得但在实际应用中有迫切需求的特定遥感数据, 当前已经开展了众多有代表性的波段模拟技术研究。
波段模拟是指利用先验数据(如地物波谱、具有目标波段的遥感图像等)来计算获得特定传感器并未设计的波段数据。波段模拟可以分为多种类型: 根据先验数据的来源, 可以分为以地物波谱为基础的谱模拟[11, 12, 13, 14]和以遥感图像为基础的图模拟[15, 16]两种方式; 根据模拟过程中采用的计算模型, 可以分为基于生物、物理及大气等一系列模型耦合运算的物理模型模拟[12, 13]和以统计模型(包括线性[11]和非线性[14, 16]模型)为基础的经验模型模拟; 另外, 也有学者[15]根据模拟的数据性能类型, 分为以传感器光学性能(光谱响应函数、MTF)为目标的静态模拟和以传感器成像性能(大气状况、成像几何条件)为目标的动态模拟。总体而言, 谱模拟可以实现光谱维上的扩展, 但是由于实地采集的光谱与图像光谱存在时间上的不一致和空间分辨率上的不一致[14], 以及大气和成像过程的差异均能导致图像光谱与实际地物光谱的偏差, 另外, 由于有限的地物波谱数据难以覆盖传感器获取影像的所有地物类别(尤其是当存在混合像元时), 因此, 这类方法当前还难以进行比较真实的模拟; 图模拟可以克服这一障碍, 只要采用相同(或近似)时间, 相同(或近似)分辨率的参考波段数据就可以获得较为真实的目标波段[16], 但其缺点是必须依赖于包含目标波段波谱范围的参考波段存在, 因此难以方便地扩展光谱维[14]; 物理模型模拟的计算复杂度较高[11]; 统计模型模拟计算量相对较小, 可以生成可视化图像, 但对机理的认识有所欠缺, 只是一种经验模型。另外, 采用传统的线性模拟方程不适合影像地物复杂的情况, 文献[14]提出了采用机器学习方法来拟合各类地物在不同观测波段范围内反射率之间的复杂非线性关系, 获得了较好的效果。
通过遥感影像模拟获取地物在不同波段下的反射特性, 有利于深化遥感成像机理的研究, 在对不同类型的传感器性能进行差异分析、对新设计的传感器性能进行论证等方面具有很大的应用价值。此外, 通过遥感影像模拟技术可解决多光谱影像波段缺损等问题, 对于遥感数据预处理工作也具有重要的意义。
1.3 基于SVR影像交叉学习的波段扩展
20世纪90年代以来, 支持向量机方法受到很高的重视, 其原因在于它对有限样本情况下模式识别中的一些根本性问题进行了系统的理论研究, 并且在此基础上建立了一种较好的通用学习算法[17]。研究表明, SVM较传统方法(包括神经网络)具有更好的适应和推广能力[18], 且该模型不受“ 维数灾难” 影响, 适合于高维遥感数据综合信息的提取。SVM方法的另一个重要优点是所得的分类器的复杂度可由支持向量的个数、而非变换空间的维数来表示。因此, SVM往往不像其他方法一样易产生过拟合现象[19], 在遥感影像分类中得到了众多应用[20, 21, 22, 23]。
基于SVM的回归方法, 又称SVR(Support Vector Regression), 其机制与分类有一些相似, 主要是通过将学习样本从低维空间映射到高维空间后, 再在高维空间中构造线性决策函数来实现线性回归。当前, 有研究采用SVR进行地物波谱学习来进行遥感影像波段模拟, 但该方法的精度受制于地物波谱库的完整性和空间尺度[14]。
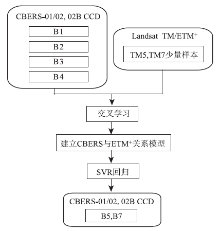
本文提出的基于SVR影像交叉学习的波段模拟方法流程如图 1所示。
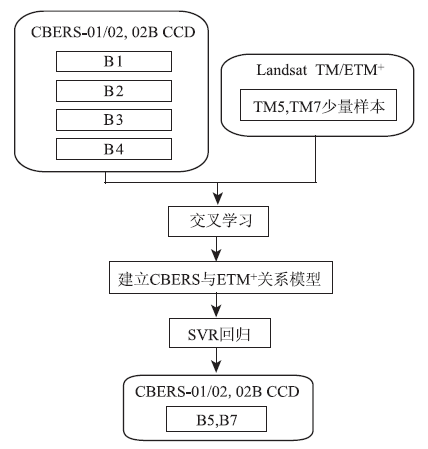 | 图1 CBERS CCD波段扩展流程Fig.1 Workflow of CBERS CCD bands simulation |
首先在研究区范围内随机采集学习样本, 然后利用SVR构建CBERS CCD的4个波段和对应的ETM+红外波段(本文以光谱范围2.08~2.35 μ m的波段为例, 即Landsat TM/ETM+波段7)的非线性关系模型, 进而将CBERS CCD的已知波段作为输入参数模拟出未知的红外波段。
2 实验数据与预处理
以覆盖天津市区的CBERS CCD和Landsat ETM+图像为实验数据, 其中CBERS CCD图像(1景, Path/Row 373/56)获取时间为2000年6月12日, 从中国资源卫星应用中心CBERS-01/02星数据服务系统网站(http://211.100.254.226/)下载; Landsat ETM+(2景, Path/Row 122/33)获取时间分别为2000年5月25日和2000年6月10日, 从美国地质调查局(USGS)地球资源观测与科学(EROS)中心网站(http://eros.usgs.gov/)下载。所有图像(除2000年6月10日的ETM+外)均没有云覆盖。
在数据预处理阶段, 首先以CCD的B1图像为基准, 将CCD的B2~B4图像与其配准, 随后将两期Landsat ETM+图像向CBERS CCD配准, 并将ETM+ 30 m空间分辨率重采样为CBERS CCD的19.5 m空间分辨率, 纠正后的误差均控制在2个像元以内。获取的3景遥感图像均为DN值。在严格的波段光谱反射率模拟中, 需将DN值经辐射定标转化为表观反射率, 并进一步通过大气校正转化为地表反射率。由于本文的目的并非严格地定量模拟出波段光谱反射率, 而是扩展出能代表新波段特征的信息, 因此只对DN值进行了模拟。
对于一个模拟的且原本并不存在的波段(即CBERS CCD的2.08~2.35 μ m的波段), 是难以找到真实波段对其模拟结果进行验证的, 因此这里采用较近时间内(相差18 d)的Landsat ETM+数据进行交叉学习, 用临近时间(2 d)内的Landsat ETM+第7波段影像来进行验证。即两景ETM+图像中, 前一景(2000年5月25日)用作CBERS(2000年6月12日)波段交叉学习, 后一景(2000年6月10日)用于验证模拟后波段的真实性。验证用的ETM+图像与CBERS数据时隔2 d, 地物变化相对较少, 作为验证图像具有合理性。为了减少两类传感器成像上的色调差异, 在扩展新波段之前, 采用直方图匹配处理将CBERS CCD影像的DN值调整到临近时间的ETM+的对应波段(波段1~波段4)。
3 波段扩展实验
3.1 定性比较
实验区图像大小为400像元× 400像元。该图像上没有云覆盖, 包含的地物主要是农田、水体和道路等。通过ETM+波段间的相关系数(以2000年5月25日数据为例)可知(表1), 两个短波红外波段(ETM+5和ETM+7)与ETM+1~ETM+4的相关性均比较高, 说明这两个波段中的部分信息可以由ETM+1~ETM+4来表达。
| 表1 Landsat ETM+波段间相关系数矩阵 Tab.1 Correlation matrix of Landsat ETM+ bands |
SVR学习需要给定参数(如不敏感系数ε 、正则化参数c、核函数参数gamma), 参数的选择对预测效果有很大影响。本文在交叉学习过程中从图像上随机选取1 000个像元作为样本, 选用epsilon-SVR回归方法, 以RBF为核函数, 通过交叉验证(n-folder cross-validation)选择最佳参数c=10, gamma=10, ε =0.1。并以这些参数建立CBERS与ETM+的关系模型, 最后进行SVR回归, 得到模拟的CBERS CCD 第7波段图像(记为B7, 下同)。
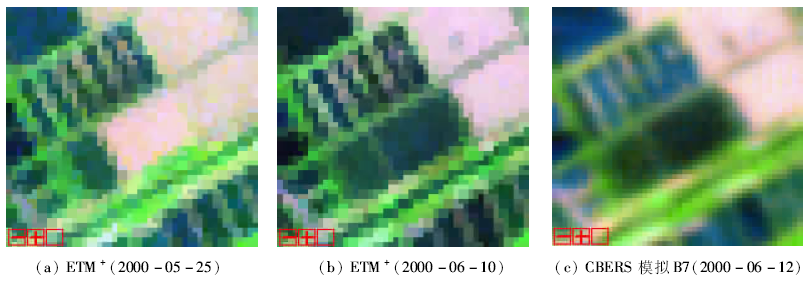
为了验证所模拟波段的可靠性, 将模拟波段与原始波段进行比较, 如图2所示。从目视效果看, 整体上模拟波段影像与原始波段影像一致。
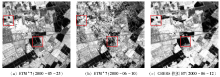
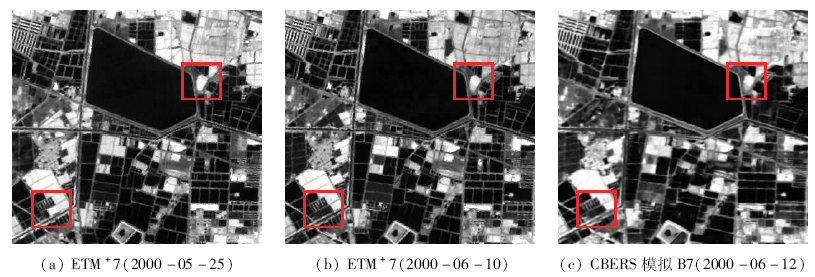 | 图2 B7图像模拟效果比较Fig.2 Simulation results comparison (B7) |
由于3景图像获取时间不同, 局部地物发生了变化, 如图3(a)中部的旱田变成了水田(图3(b)), CBERS模拟影像(图3(c))与图3(b)一致。这是因为, 图3(c)反映的是2000年6月12日的情况, 与2000年6月10日情况一致, 而与2000年5月25日不同则符合该期间土地耕作方式变化的实际。
3.2 定量比较
通过定量比较相关性发现, 模拟图像保持了较好的时间相关性和光谱相关性。从表2可以看出, CBER CCD波段(B1~B4和模拟B7)与ETM+的相应波段之间的相关系数体现了时间一致性。即2000年6月12日获取的CBERS数据与2000年6月10日ETM+各波段的相关性均较2000年5月25日中ETM+各波段的相关性高。
| 表2 CBERS B1~B4, 模拟B7与两期ETM+同波段的相关系数 Tab.2 Band correlation coefficients of CBERS B1~B4, simulated B7 and two ETM+ datasets |
从表3可以看出, 模拟的波段(B7)与CBERS其他波段, 以及与ETM+1~4、ETM+7的相关性相比, 与ETM+两景图像的第7波段相关性最高, 这表明了模拟的图像保持了较好的光谱相关性。
| 表3 CBERS模拟B7与两期ETM+1~4、7波段的相关性 Tab.3 Band correlation coefficients of CBERS simulated B7 vs ETM+1~4、7 |
上述实验通过ETM+7(2000-05-25)与CBERS CCD B1~B4(2006-06-12)之间的交叉学习建立模型, 并模拟CBERS(2006-06-12)的对应B7, 该模拟波段与验证波段ETM+7(2000-06-10)之间的相关系数为0.920 1(表2和表3)。实验还表明, 采用临近时间的ETM+7(2000-06-10)作为训练波段后进行交叉学习, 获得的模拟波段与验证波段之间的相关性提高到0.926 8。说明采用时间上尽可能接近的数据进行波段交叉学习, 可以获得更高精度的模拟结果。
3.3 讨论
由于在训练过程中, 只需要选择少量样本进行训练, 如在上面的实验中, 仅选择了1 000个样本, 这些样本只占图像总像素数量的0.625%(1000/160000), 因此也适合于有部分云覆盖或者ETM+SLC-off的情况。即从非云覆盖或从非条带中挑选出足够的训练点来进行波段交叉学习, 建立SVR模型。
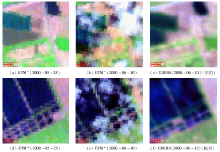
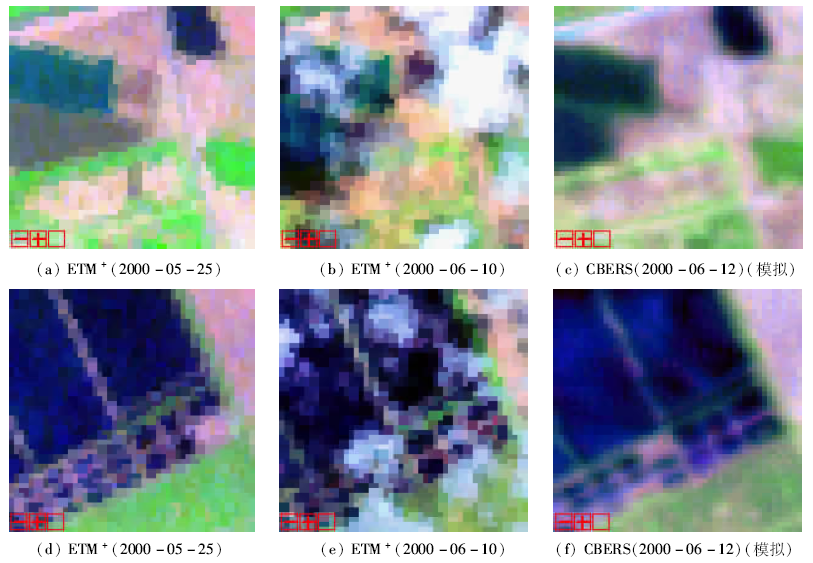
另外, 上面提到通过波段交叉学习可以实现Landsat与CBERS数据的协同应用。如本文的实验区影像中的部分区域在ETM+(2000-06-10)影像中存在较多的云覆盖, 但ETM+(2000-05-25)与CBERS(2000-06-10)均没有云覆盖。因此可以通过图1所示的交叉学习获得CBERS原本不具备的且与ETM+相对应的波段(图4和图5)。由于CBERS数据与被云覆盖的ETM+数据的获取时间接近, 而且通过模拟之后波段设置也已相同, 因此可以采用CBERS数据来替代该景有云覆盖的ETM+数据进行后续的变化检测及分析。
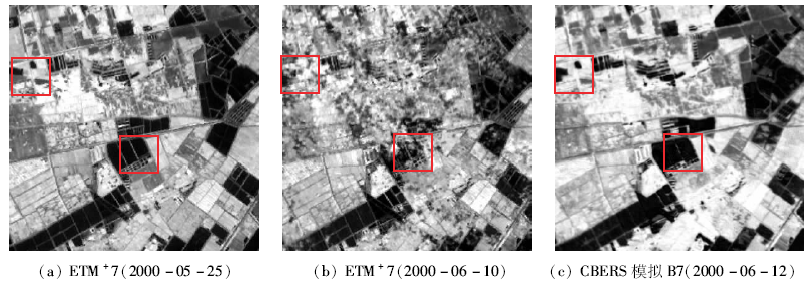 | 图4 B7模拟效果比较Fig.4 Simulation result comparison (B7) |
实验表明, 采用影像交叉学习的方法可以通过从受噪声影响(如云覆盖、ETM+的条带缺失等)的原始影像中挑选出少量未受影响的训练点进行学习, 建立CBERS CCD数据和ETM+数据之间的关系模型。因此, 只要CBERS CCD数据本身未受这些噪声影响, 将仍然能够进行准确的波段扩展。这一方法也为在实际应用中, 当研究区特定时相的ETM+数据存在云覆盖或条带缺失时, 提供了一种除了寻求对原始数据进行去云和gap-filling处理以外的方案, 即采用近时相的CBERS CCD数据在扩展出波段5和波段7后来替代ETM+数据。由于这两类传感器数据具有相似的空间分辨率, 并且通过模拟之后也得到了相同的波段, 因此为采用一致的遥感信息提取方法进行处理提供了基础。
4 结论
针对CBERS CCD数据与Landsat TM/ETM+数据相比波段少的缺点, 采用基于SVR的影像交叉学习方法进行CBERS CCD波段扩展模拟。实验表明, 模拟的CBERS CCD新波段与验证波段之间的相关系数达到0.9以上。通过视觉比较发现, 模拟影像能够较好地保持实际时间的地物光谱。进一步实验表明, 本文方法为CBERS CCD数据与Landsat TM/ETM+数据相互协同应用提供了一种方案。一方面是扩展了CBERS CCD的波段, 扩大了其应用领域, 另一方面也为多源遥感数据之间的协同应用提供了一种思路。
The authors have declared that no competing interests exist.
参考文献
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
|
| [17] |
|
| [18] |
|
| [19] |
|
| [20] |
|
| [21] |
|
| [22] |
|
| [23] |
|