

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
基于D-S证据理论的多特征融合SAR图像目标识别方法
[童涛1  , 杨桄
, 杨桄1 , 李昕2 , 叶怡1 , 王寿彪1 ]
, 杨桄, 李昕|
|


第一作者简介: 童 涛(1989 -), 男, 硕士研究生, 主要研究方向为SAR图像解译。 E-mail:15943049612@163.com。
针对应用单特征SAR图像进行目标识别准确率低的问题,提出了一种将支持向量机(support vector machine,SVM)和D-S证据理论(Dempster-Shafer,D-S)相结合的多特征融合SAR图像目标识别方法。该方法在对SAR图像预处理的基础上,提取目标的纹理、Hu不变矩和峰值特征,并分别以这3类单特征的SVM分类结果作为独立证据,构造基本概率指派,通过D-S证据的组合规则进行融合,并根据分类判决门限给出最终的目标识别结果。将该方法用于SAR图像上的3类目标识别,识别率达95.5%,表明该方法是一种有效的SAR图像目标识别方法。
In view of the low accuracy of the single feature-based method for target recognition in SAR image, a multi-feature decision-making level fusion method based on SVM and D-S evidence theory was proposed.After a series of image processing, the texture feature, Hu invariant moments feature and peek feature were extracted from the target image. Then the targets were classified according to each type of features utilizing SVM, and the results were used as evidence to construct the basic probability assignment. Conclusively, D-S combination rule of evidence was used to achieve fusion, and final recognition results were given by classification thresholds. The method is used for recognizing three-class targets in MSTAR database, and the recognition rate arrives at 95.5%. Experimental result shows that the method is effective for SAR images target recognition.
应用合成孔径雷达(synthetic aperture radar, SAR)图像进行目标识别是SAR图像处理和模式识别领域的研究热点之一。国内外学者对SAR图像目标自动识别方法进行了大量的研究和探索, 但是大都只侧重于对单一特征的研究[1, 2]。受SAR传感器俯仰角和方位角等变化因素的影响, 基于纹理、灰度及投影空间等单特征目标识别方法的准确率低、稳定性差; 而综合利用多特征SAR图像的目标识别方法, 虽然已经取得了一定成果, 并在一定程度上改善了目标识别效果, 但并没有实现多特征的有效融合, 从而导致特征空间的复杂度和分类器的维数过高, 影响了目标识别的精度和效率。
支持向量机(support vector machine, SVM)[3]是建立在统计学理论(Vapnik-Chervonenkis 维理论)和结构风险最小化原理[4, 5]基础上的, 应用它可避免局部最优解, 克服“ 维数灾难” , 在解决小样本及高维模式识别问题中表现出许多特有的优势。D-S证据理论(Dempster-Shafer)[6]作为一种不确定性的推理方法, 允许人们对不精确、不确定性问题进行建模, 并进行推理。为了进一步提高SAR图像目标识别的准确性, 本文在对图像预处理与特征提取的基础上, 提出了一种基于D-S证据理论的多特征融合SAR图像目标识别方法, 并利用MSTAR项目组公布的识别结果对该方法进行了验证和分析。结果表明, 与现有的目标识别方法相比, 该方法的准确性和稳定性有了明显提高。
D-S证据理论是一种对不确定性信息进行推理的方法, 其主要思想是先将所有的证据集划分成2个或2个以上互不相关的部分, 并利用它们分别对鉴别框架进行判断; 然后采用组合规则, 将所有证据合并成一个新的证据。
D-S证据理论的原理是设Ω 是变量X所有可能取值的集合, 并且所有在Ω 中的各元素是互不相容的, 则称Ω 为X的识别框架。定义函数m:2Ω → [0, 1]满足m(ϕ )=0,
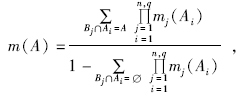 |
式中: Bj(j=1, …, n)和Ai(i=1, …, q)分别为BPA函数的焦元; Bj∩ Ai=⌀表示分配到空集上的信质; Bj∩ Ai=A表示分配到A的总信质。
D-S组合规则是设m1, m2, …, mn是n个相互独立证据的基本概率赋值, 则其正交和m=m1m2…mn即为将若干条独立证据组合而得到的证据融合结果。
在证据理论中, 可用基本概率赋值函数来描述和处理知识的不确定性。
支持向量机(SVM)是Vapnik等人在统计理论和结构风险最小原理基础上提出的一种新的机器学习方法。该方法的基本思想是通过定义适当的内积函数实现非线性变换, 将输入空间变换到一个高维空间, 并在这个新空间中求取最优线性分类面。其最优分类函数为
f(x)=sgn[
式中: sgn( )为符号函数;
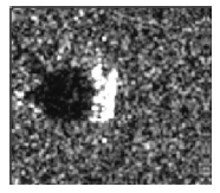
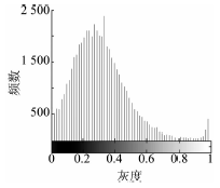
为了消除SAR图像上噪声的影响, 有效提取出目标的特征, 以图1实验样本中的军用车辆为例, 首先提取灰度直方图(图2), 并以此为依据, 采用Otsu法[7]对图1进行阈值分割, 获得目标的二值图像; 然后, 对其进行形态学平滑处理, 提取出目标的感兴趣区域(ROI)(图3); 在此基础之上, 分别提取出目标的纹理特征、Hu不变矩特征及峰值特征(图4)。
 | 图1 SAR图像Fig.1 SAR image |
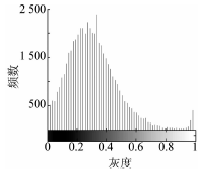 | 图2 灰度直方图Fig.2 Gray histogram |
 | 图3 目标的ROIFig.3 Target ROI |
 | 图4 提取的峰值特征Fig.4 Peek feature |
2.1.1 纹理特征提取
通过提取灰度共生矩阵中的能量T1、相关性T2、对比度T3及均匀性T4来描述目标的纹理特征, 计算式分别为
T1=
T2=
T3=
T4=
式(3)— (6)中: i=1, …, n; j=1, …, m; θ 表示方向; d表示距离; P为灰度共生矩阵; μ 和σ 分别表示灰度共生矩阵的均值和标准方差。T1反映了图像灰度分布的一致性程度; T2反映非匀质区域的差别; T3反映了纹理的粗细度; T4为图像分布平滑性的测度。所提取的图像纹理特征表示为FT=[ T1, T2, T3, T4]。
2.1.2 Hu不变矩特征提取
利用标准化二阶和三阶中心矩导出的Hu不变矩特征[8]具有平移不变性、尺度不变性、旋转不变性和能反映图像内部细节等优点, 可有效描述目标的整体形状, 在边缘提取、目标识别中具有广泛的应用。Hu不变矩特征定义为如下7个, 即
f1=η 20+η 02, (7)
式中: η pq(p, q=0, 1, 2, 3)为归一化中心矩。对训练和测试样本分别提取各自的7个Hu不变矩特征, 组成特征向量FB=[f1, f2, f3, f4, f5, f6, f7]。并对样本特征作归一化处理, 以避免Hu不变矩特征随着目标尺寸和像元值大小以及目标形状的不同所表现出的数值差异。
2.1.3 峰值特征提取
目标峰值是SAR图像目标识别的重要特征之一, 其本质是SAR在成像过程中, 点散射体响应和SAR系统冲击响应函数卷积的结果, 具体表现为SAR图像上的局部极大值, 通常用2坐标轴的位置、幅度、宽度以及方向等参数来描述。
峰值通常可用高斯函数进行建模, 通用的高斯峰值模型表达式为
I(u, v, θ )=H
式中: H为峰值的幅度; (u, v)表示理想散射体在幅度图像上的坐标; (u0, v0)为峰值中心点在图像上的坐标;
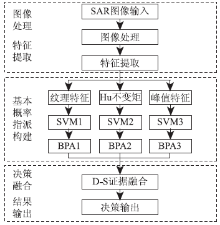
在SAR图像目标识别过程中, 目标的纹理、Hu不变矩及峰值特征是彼此相互独立的, 因而, 利用D-S证据理论组合来自不同特征的SVM识别信息, 进而通过决策模块给出目标的类型是合理、可行的。目标的识别流程如图5所示。
 | 图5 目标识别流程图Fig.5 Flow chart of target recognition |
2.2.1 单特征SVM识别
在上述图像预处理的基础上, 分别提取出目标的纹理、Hu不变矩及峰值特征, 并将其分别输入到SVM分类器中进行单特征的目标初步识别。
2.2.2 SVM概率输出和BPA函数构造
标准SVM的判决输出属于硬判决输出。为了能够将SVM运用于D-S证据理论的基本可信度分配, 需要具有软判决输出的SVM。目前普遍采用的方法是由Platt[9]提出的, 用sigmoid函数作为连接函数将SVM输出f (x)映射到[0, 1], 实现对SVM的概率输出, 输出形式为
p(y=1|x)≈ PA, B(f)=
式中参数A, B能实现对sigmoid函数的缩放和平移, 可以通过求解最大似然问题得到, 即
pi=PA, B(fi), (11)
ti=
式中: T+和T-分别为正负样本的数目; yi表示样本的类别。对于任意一个2类的SVM(i)(i=1, 2, 3表示第i个分类器), 通过样本集的学习之后, 根据式(9)得到最优参数A和B, 并构造出后验概率pi; 进而对SVM(i)学习样本集进行测试, 得到学习样本集的识别准确率Ei, 定义BPA函数为
mi(A)=piEi。 (13)
2.2.3 目标判定规则
本文采用基于基本可信度分配的方法, 确定如下4条目标判定规则:
1)目标类别应具有最大的信度;
2)目标类别的信度与其他类别的信度之差必须大于某阈值λ 1, 也即每一证据对所有不同类的支持程度应保持足够大的差异;
3) 不确定性概率m(Ω )必须小于某阈值λ 2, 也即对目标类别证据的不确定性不能太大;
4)目标类别的信度必须大于不确定性概率m(Ω ), 即对目标知道很少时, 不能对其分类。
2.2.4 决策融合
假设Mi(i=1, 2, 3)为目标的类型, Me为指定的目标类别, 依据上述目标判定规则, 可以得出, m(Me)=max{m(Mi)}, m(Me)-m(Mi)> λ 1, m(Ω )< λ 2, m(Me)-m(Ω )> θ 。根据式(13)分别计算出各个证据的信度, 并利用式(1)计算出各证据支持下的联合信度。
采用MSTAR项目组公布的SAR图像数据, 图像分辨率为0.3 m× 0.3 m。图像上军用车辆目标包括BMP2(坦克), BTR70(装甲运兵车)和T72(坦克) , 文中分别用M1, M2和M3表示。实验的训练样本是SAR在俯仰角为17° 时对地面目标的成像数据, 测试样本为SAR在俯仰角为15° 时对地面目标的成像数据。具体训练和测试样本集如表1所示。
| 表1 样本集 Tab.1 Sample set |
首先, 按照上述方法提取出目标的纹理特征、Hu不变矩特征及峰值特征, 并进行归一化处理; 然后, 结合本文所提出的基于SVM和D-S证据理论的多特征融合SAR图像识别方法进行目标的分类识别。
实验中选取径向基函数(RBF)为SVM模型的核函数, 并通过交叉验证方法确定误差惩罚参数d=35, 核参数σ =2.54; 在决策融合中, 通过多次试验统计得出判决规则中的门限λ 1=0.61, λ 2=0.1, θ =0.72。
随机选取2个样本, 并记录实验中单特征和多特征融合的信度函数值及其识别结果, 具体数值如表2所示。
| 表2 单特征和多特征融合的信度函数值 Tab.2 Reliability function value of single feature and multi-feature fusion |
通过分析表2可知, 样本200在融合前信度函数值最高为0.661, 融合后达到了0.875, 目标不确定函数值由最低0.105降低到0.011。那么, 基于单特征无法确定的目标类型, 融合后能够得以确定。将纹理特征、Hu不变矩特征及峰值特征融合后的信度函数值显著增加了对实际目标的信任度, 同时降低了对目标识别的不确定性。对识别结果的分析也可以发现, 基于某单个特征无法确定目标类型的情况, 通过多特征融合后能够得出准确的识别结果, 验证了基于SVM和D-S证据理论的多特征决策级融合识别方法的准确性和可靠性。
用识别率[2]Pd=Ntt/Ngt来描述识别的准确性, 其中Ntt表示实验中正确识别目标的个数, Ngt表示实验中所识别的总数。表3列出了基于单、多特征融合后的目标识别率。
| 表3 单特征和多特征融合识别率 Tab.3 Recognition rate of single feature and multi-feature fusion |
从表3可以看出, 基于SVM和D-S证据理论的多特征决策级融合识别方法的目标识别率达到0.955, 大大地提到了目标识别的准确率。表4为本文方法得到的混淆矩阵和识别率。
| 表4 基于本文方法的混淆矩阵和识别率 Tab.4 Confusion matrix and recognition rate based on the method |
为了进一步验证该方法的有效性, 表5列出了文献[2]和文献[10]与本文方法目标识别率的比较。通过分析可以得出, 本文所提出的方法明显提高了目标的识别率, 并具一定的鲁棒性。因此, 以SVM后验概率和分类精度构造的信度指派为依据, 根据证据组合规则, 融合来自纹理、Hu不变矩和峰值等不同特征的多个识别信息, 能够实现单特征决策对多特征融合决策的有效支持作用, 从而进一步提高了目标识别的准确率和稳定性。
| 表5 几种目标识别方法的比较 Tab.5 Comparison of several target recognition methods |
本文提出了一种基于SVM和D-S证据理论的多特征融合SAR图像目标识别方法, 该方法采用SVM分类器, 分别基于纹理、Hu不变矩和峰值等单特征进行SAR图像目标初步识别, 并以SVM的输出作为独立证据分别构造出基本概率指派; 然后基于D-S证据理论进行各个证据信息的有效融合; 最后根据目标判定规则进行决策级融合。实验表明, 本文方法能够实现多特征的有效融合, 提高了SAR图像目标识别的准确率。
The authors have declared that no competing interests exist.
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|