

{kind=link}
{kind=link}
{kind=link}
基于无人机遥感技术的潮间带高程测量方法
[唐远彬 , 刘文, 任少华]
, 刘文, 任少华]
, 刘文, 任少华]
|
|


第一作者简介: 唐远彬(1982-), 男, 工程师, 博士, 主要从事时空数据更新、海洋测绘和地理信息系统研究。 E-mail:yuanbintang@163.com。
浙江省沿海地形地貌复杂,许多临海或近海岛屿滩涂无法采用传统方式测量潮间带的高程。为解决潮间带高程人工上滩测量困难问题,对利用无人机遥感技术结合潮位观测实现潮间带高程测量的方法进行了研究。首先,结合现有资料确定航摄区域和潮位基本信息; 然后同步进行无人机航摄作业和潮位观测外业; 最后,通过航摄获取的正射影像数据绘制高精度的水陆边线,对潮位观测数据插值,实现潮间带高程测量。研究结果表明: 该方法能定量描述潮间带高程信息,是对传统潮间带高程测量方法的一种补充,已成功应用于2012年浙江省滩涂资源调查项目,具有操作简单、可行性强及经济效益高等特点。
The coastal terrain of Zhejiang is complex. It is impossible to use the traditional way to measure the tideland heights of many beaches or offshore islands. With UAV remote sensing technology and tidal observation, the tideland height can be measured, and the difficult problems of artificial measurement can be solved, thus greatly improving the efficiency. Firstly, in combination with existing data, the aerial region and tide information are determined.Secondly,the UAV aerial operations and tidal observations are implemented outside synchronization. Finally, the boundary between tide and coast are interpreted and drawn with high-precision remote sensing image data (DOM), the tidal observation data are interpolated to update tideland height. The results show that this technology can quantitatively describe the tideland height information and is hence a new method of tideland height measurement.
潮间带是指岸线至理论最低潮面(理论深度基准面)0 m线之间的区域[1]。传统的潮间带测量主要通过采集潮间带地物、地形地貌、高程以及平均大潮高潮线(岸线)和最低低潮线等数据进行。目前, 根据海滩性质将潮间带高程测量方法分为水下地形测量和直接上滩测量2种: 在深水区域采用DGPS(difference global positioning system)结合单波束回声测深仪进行水下地形测量; 对于高水位时被淹没、低水位时又露出水面的高滩(靠近岸线且高程值比较大的部分滩涂), 由于人工上滩测量难度不大, 可利用DGPS配合CORS(continuously operating reference stations)技术直接上滩测量。
浙江省沿海地形地貌复杂, 许多临海滩涂或近海岛屿滩涂靠人工无法直接获取实测数据; 高滩面积较大的区域采用人工上滩测量工作量大且工期长。为此, 本文进行了基于无人机遥感技术结合潮位观测实现潮间带高程测量的方法研究。主要思路是: 首先, 基于CAD平台拼接其他方式采集的数据, 根据已经测量的各种数据确定航摄区域范围; 然后, 采用无人机低空数码遥感系统快速获取大比例尺真彩色航空影像, 经过内业处理生产制作出正射影像; 最后, 配以无人机航摄时同步观测的潮位数据, 绘制出高精度的水陆交界线, 从而达到测量潮间带高程的目的。
无人机遥感技术具有系统结构简单、飞行成本低、反应速度快及飞机易于转场等优势, 已广泛应用于高危区域灾害调查和灾后应急抢险[2, 3, 4]调查与分析工作中。在国内无人机民用遥感领域, 无人固定翼飞机因为覆盖范围较大、可控性能和效率相对较高, 一般用以完成较大面积区域的航空影像获取, 与机载GPS, POS等辅助设备相结合, 可以满足较高精度的测绘制图需求[5, 6]。
无人机遥感平台主要包括无人机平台与航摄相机。无人机平台集成了机载GPS和POS等辅助设备, 同时包含地面监控系统, 用于设计、规划航线, 实时监测无人机飞行航线, 如遇紧急状况或降落时可自动切换成手控飞行; 航摄相机一般选用专业的单反数码相机, 在与无人机安装时增加稳定相机的装置, 尽可能地把相机姿态固定。由于数码照片的数据量较大, 目前还无法达到实时传输的能力, 因此需把拍摄的影像数据保存在大容量存储卡中, 待飞机降落时回收[6]。
根据航摄区风力情况, 本次研究使用的无人机平台为ZC-1型和ZC-2型无人机, 如图1所示。
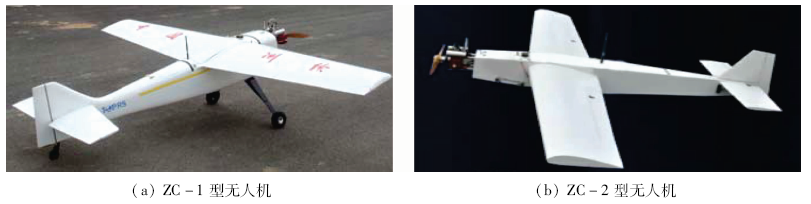 | 图1 无人机平台Fig.1 UAV platform |
ZC-1型无人机的机身为玻璃纤维材质, 抗风性能好, 有效载荷大, 但自身重量也大, 对起飞场地的要求严格, 因此在5~6级以上大风天气情况下选用ZC-1型无人机; ZC-2型无人机的机身为航空木板材质, 轻巧易操作, 对起飞场地的要求不高, 但抗风性能较差, 因此在5级以下风力天气情况下选用ZC-2型无人机。无人机上搭载的航摄相机为Canon EOS 5D MARK II专业单反相机, 焦距为24.436 4 mm, 分辨率为6.4 μ m, 影像行列数为5 616× 3 744。相机检校参数见表1。
| 表1 相机检校参数 Tab.1 Camera calibration parameters |
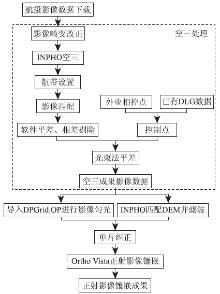
无人机航摄作业流程主要包括航摄设计、航摄飞行和影像处理3个步骤。本次航摄设计地面分辨率为0.2 m, 航高为750 m。为保证大风天气下不出现航摄漏洞, 将航向重叠度设计为75%, 旁向重叠度设计为50%。航摄飞行根据潮汐表水位信息选择阳光照射较为充足的中潮位时间段内进行, 以保证影像质量。影像处理主要包括畸变差校正、空中三角测量、影像匀光、单片纠正以及正射影像镶嵌与生成等内容, 详细技术流程如图2所示。文献[6-10]对无人机遥感影像获取、数据处理、质量评定以及地图制作进行了较为深入研究, 在此不再赘述。
在空三加密过程中, 在每个加密区四周和内布设一定量的平高控制点。人能到达区域的像控点采用GPS-RTK(real-time kinematic)实地测量, 对于不能到达的区域利用1:1万比例尺立体像对在JX-4立体模型上采集。空三加密将根据每个航摄区块进行分区。
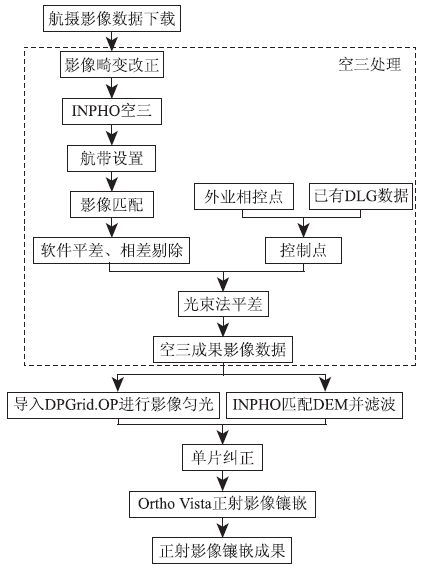 | 图2 无人机航摄影像处理流程Fig.2 UAV aerial image processing flow |
应用本文方法实现潮间带高程测量的依据是“ 潮汐性质基本相同” 原理。测区范围内的潮位必须满足“ 最大潮高差≤ 1 m, 最大潮时差≤ 2 h” [1]。当满足这2个要求时, 即可用在潮位站观测得到的水位高程值代替瞬时潮水高度。因此, 通过在无人机航摄数字正射影像图上绘制水陆边界线, 计算影像拍摄时同步观测的水位高程值, 就能得到潮间带区域高程信息。
在对潮间带区域进行航摄时同步观测潮位。观测位置尽量接近摄影区域, 以便能更准确地反映潮汐的真实变化情况。观测时间须完全覆盖摄影测量时间, 每隔10 min记录一次水面高程。无人机同时对2个及2个以上摄影区作业时, 要确保有一定密度的潮位观测站, 以控制航摄区域内的潮汐变化特征。无人机航摄作业前需对照摄影区附近的验潮站高低潮时间, 合理安排航摄作业时间, 确保采集数据的时段在半潮时内。
潮位观测时, 利用网络RTK结合全站仪方法采集水面瞬时WGS84高程(网络RTK固定解), 内业处理时用WGS84高程减去该区域高程异常值便得到水面1985高程。在作业区域条件允许时, 直接用网络RTK采集水面WGS84高程; 否则需在观测水位区域附近用网络RTK做水准点并采集其WGS84高程, 利用全站仪将WGS84高程引测至水面。
潮位观测记录要记录清楚潮位站概略位置、潮位站控制的摄影区块名称、作业时参考的验潮站以及观测时刻、潮位的WGS84高程与1985高程等信息。表2为无人机作业潮位观测记录表, 表中潮位站地理位置经纬度数据已进行了模糊处理。
| 表2 无人机作业水位观测记录表 Tab.2 UAV operating tidemark observation records |
首先, 通过叠加潮间带拍摄区地形图数据与无人机正射影像数据人工判别并绘制水陆边界, 获取潮间带等值线; 然后, 对其赋予潮位观测得到水位高程值。考虑到测区水位观测站的布置特点以及范围, 水位高程值的计算采用单站改正和双站改正2种方法进行。
单站改正法主要针对有效控制范围内的水位观测, 采用线性插值方法对水位观测时间进行内插, 得到潮水瞬时高度。假设t1时刻水位观测值为h1, t2时刻水位观测值为h2, 则t时刻水位高度h计算公式为
h=
式中t时刻位于t1到t2之间。
双站改正法是指当测区位于2个水位观测站之间, 并且超出2站的有效控制范围时, 可通过双观测站瞬时水位高度, 在其连线上根据距离加权的原理线性内插出若干个区域的水位高程值。通过无人机遥感影像对每个区域绘制出水陆边界线, 使用内插得到的水位高程值进行更新。假设t时刻水位观测站a的瞬时水位高度为ha, 水位观测站b的瞬时水位高度为hb, 待计算区域n的中心点到水位观测站a和b的直线距离分别为da和db, 则t时刻区域n的瞬时水位高度hn计算公式为
hn=
式中ha和hb可通过式(1)插值得到。
由于无人机航摄具有响应快速和成本低廉等优点, 对重要的潮间带区域可以进行加密航摄, 以获取足够的高程实测信息, 为更好地进行滩涂资源规划、利用和保护提供了丰富数据。
在浙江省2012年滩涂资源调查中, 利用无人机遥感技术结合潮位观测进行了潮间带高程测量。调查范围覆盖浙江沿海地区各种地形的滩涂区域。32个航摄区块分布在象山、三门、温岭、玉环及洞头5个县市。航摄面积共计130 km2; 航摄作业时平均风力在5~7级以上。
本次无人机航摄获取的潮间带影像数据经过空三加密处理后, 成果数据内定向精度的理论值为0, 相对定向中误差一般为0.01 mm(10 μ m)、最大为0.018 mm(18 μ m); 绝对定向精度中的基本定向残差、多余控制点不符值及公共点较差符合设计书要求。经平差后加密点中平面误差一般为1.8 m, 精度符合要求。航摄像片共1 467张, 影像清晰、质量较好, 能比较准确地确定出海水与陆地的分界线。
首次, 基于AutoCAD软件叠加显示水下地形实测数据和无人机正射影像数据, 通过人工判读绘制水陆边界线。图3(a)上的黄线即为人工判读的水陆边界线。
然后, 将水陆边界与潮位观测数据相结合, 计算瞬时潮位高程, 实现潮间带高程赋值。与自然海岸线、水下等高线数据的比较验证表明, 潮间带高程分布合理且符合自然规律。
最后, 对潮间带高程数据用于水下地形高程插值计算, 图3(b)为该区域1:1万水下地形最终成果数据。
 | 图3 水陆边界绘制和成果图Fig.3 Boundary of tide and coast and result map |
许多临海滩涂或近海岛屿滩涂的测量存在无法人工上滩测量, 或上滩测量危险性高、工作效率低等问题, 依靠传统测量方式不能得到有效解决。随着无人机遥感技术的快速发展, 其获取影像数据经济、快速、受时间限制小等优点已在高危地区调查和应急响应中得到了很好的体现。本文对利用无人机遥感技术结合潮位观测实现潮间带高程测量的技术进行了研究, 重点介绍了无人机遥感平台及其影像数据处理流程, 对潮位观测外业实施和潮间带水陆边线处理进行了技术探索和实践。2012年浙江省滩涂资源调查中使用了无人机测量潮间带高程的实践证明, 无人机遥感技术结合潮位观测能够快速实现潮间带高程测量, 解决传统方式测量困难的问题, 提供了一种新的潮间带高程测量技术。
The authors have declared that no competing interests exist.
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|