
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
无人机影像局部增强方法及其在影像匹配中的应用
[唐敏1  , 李永树
, 李永树1 , 李歆2 , 刘波2 ]
, 李永树|
|


第一作者简介: 唐敏(1986-),男,博士研究生,研究方向为低空遥感技术理论与应用。E-mail:tangmin0553@sina.com。
无人机影像的质量与成像时的光线、成像角度及所拍摄地物的特征有着密切关系。很多影像都存在着视觉对比度差、影像畸变大及分辨率低等缺点,给后续影像匹配和正射纠正带来困难。为了提高无人机影像的匹配效果,首先利用原始影像的离散灰度信息计算每个像元灰度值与整个影像灰度平均值的离散程度,并把影像划分为不同区域; 然后利用距离加权插值方法计算的变换函数对各区域影像进行不同程度的增强处理,对增强后影像的直方图进行修正; 最后利用核线约束法对影像进行匹配和均匀度检验。研究结果表明,由于增强后影像的灰度梯度差变大,在畸变较大及灰度变化较小的林地分布区域,影像的匹配成功率和均匀度都有一定程度的提高。
The quality of UAV image is closely related to light, imaging angle and the feature of the ground object. There are some shortcomings in many images, such as poor visual contrast, large distortion and insufficient resolution, which cause many difficulties in subsequent image matching and orthorectification. To obtain better results in UAV image matching, the authors first calculated the degree of dispersion between gray value of pixel and image gray average to divide the image into different areas according to the discrete gray information of original images. Then, the distance weighted interpolation method was used to calculate the transformation function and enhanced the various regions in different degrees. After that, the histogram of enhanced image was corrected. Finally, the epipolar constraint method was used in the image matching experiment. The results show that, because of the enhanced image gray value gradient difference, there exists some extent of increased matching success rate and uniformity in the woodland area which has smaller gray change, thus favoring the smooth progress of the work of subsequent image processing.
无人机遥感器获取的影像灰度范围并不能覆盖其所能达到的整个灰度级范围, 影像对比度较差[1, 2, 3, 4, 5], 因此, 在对影像进行分析之前有必要先对其进行增强处理。常用的影像增强方法(如直方图均衡化、线性拉伸、多直方图均衡等[6, 7, 8])通常用来改进全局影像的对比度, 但对局部细节部分的改进效果较差, 容易造成噪声和对比度过度增强现象及振铃效应(在图像灰度变化较大的邻域出现信息量丢失, 尤其是高频信息的丢失)[7]。为了避免上述问题的出现, 在对影像进行信息增强处理时可根据影像灰度区间的不同而采用不同的线性或非线性变换, 但如何划分灰度区间成了关键问题。
目前, 针对遥感图像的增强算法研究已经取得了较多的成果: 赵晓捷等[9]提出了用反距离加权插值函数的方法对局部区域进行增强; 陈志刚等[10]提出了基于Contourlet变换的图像增强算法; 李骜等[11]提出了基于照度划分的多尺度图像增强算法, 等等。但针对无人机影像局部增强方面的研究成果还相对较少。为此, 本文利用局部影像增强方法, 使增强后影像的一些像元与周围像元的梯度值变大, 突出更多的特征点以利于更好地提取与匹配, 并通过匹配实验来评估增强效果。最终的匹配效果从影像的均匀程度和数量上都有较大的改善, 为后续的影像匹配和正射纠正打下了坚实基础。
一幅图像的灰度级可被视为区间[0, 1]的随机变量, 可以用其概率密度函数来表达这个随机变量。设原像元的灰度值为r(0≤ r≤ 1), 经过变换后的像元灰度值为s, 令Pr(r)和Ps(s)分别代表随机变量r和s的概率密度函数, 变换函数为T(r), 则有[12]
也就是说, 原始图像上每一个像元灰度值r经变换后都会产生一个灰度值s。变换函数应满足: ①在区间0≤ r≤ 1中为单值且单调递增; ②0≤ T(r)≤ 1。这样能够保证输出灰度级与输入灰度级有相同的范围。令
s=T(r)=
则有
将式(3)带入式(1)得到
Ps(s)=Pr(r)
以上是连续函数变换公式, 当应用于数字图像处理时, 如果数字图像灰度有L阶, 则
sk=T(rk)=
式中: k=0, 1, 2, …, L-1代表影像的灰阶; n代表总像元数; nj代表第j灰度层上像元的个数; Pr(rj)代表第j灰度层上的概率密度; T(rk)代表第k灰度层上像元的变换函数; sk为最终的变换结果。
不同区域的无人机影像上的地物信息会有所不同, 有些是以房屋、道路等为主的平原区域信息, 而有些则是以树木为主的山区信息。所以, 在影像增强时需要选择窗口的大小。窗口过大会使区域分配效果不好, 而窗口过小会导致数据处理量过大, 使运算效率大大降低。本文采用以下方法确定窗口的大小, 并对区域进行划分。
在M像元× N像元大小的无人机影像窗口中, 令f(i, j)代表点(i, j)处灰度值, 则该窗口地物的平均灰度值为
f=
窗口中各像元灰度值与影像灰度平均值的总离散程度为
T2=
利用T2来确定窗口所在区域是否包含过多的地物特征, 以此来调整窗口大小及位置, 然后通过窗口的平均灰度值f及总离散程度T2来确定窗口的区域归属情况, 从而对各区域进行不同程度的增强处理。具体步骤如下:
1)根据影像特征, 把影像分为灰度变化明显的耕地道路区域和灰度变化较小的林地区域。分别选取样本数据, 根据式(6)和式(7)分别计算出各自的平均灰度值f和总离散程度T2, 并以此作为标准数据, 以备后续区域划分时参照。
2)根据影像灰度分布特征选择一个m× n大小的可变窗口, 以步长m左右平移窗口, 以步长n上下平移窗口, 计算每个窗口的f和T2。
3) 如果计算所得的f和T2与某个区域标准数据f和 T2在一定限差范围内, 则将该窗口划分入该特征区域。
4) 逐步减小m和n的值, 对未被划分入任何特征区域的窗口重复进行2), 3)步的操作, 直至划分完所有区域为止。
由于本文的无人机影像特点比较集中, 计划时只划分2种特征区域, 即耕地道路区域和林地区域。
根据上述方法对影像进行区域划分后, 针对不同区域的特点进行不同程度的增强处理。对需要加强的像元点设定一个权值指数α 和平滑参数β 。α 主要控制周围不同灰度像元点对其灰度的影响权重, β 主要起到衔接其他区域与该像元点的平滑过渡的作用。利用距离加权方法将插值函数F(x, y)定义为各数据点函数值fn的加权平均, 即
F(x, y)=
Wn=
式中dn(x, y)=
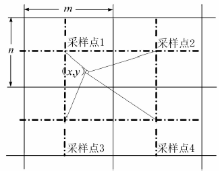
如图1所示, m× n为划分的一个小区域, 点(x, y)为待插值点。用待处理像元点4邻域图像块的变换函数进行插值, 其中心的交点即为要计算的点。每一个采样点对应子块的均衡变换函数, 图像其他像元点的变换函数通过插值得到。为了提高算法的适应性, 引入距离的计算来确定权值的指数α 和平滑参数β 。采样点离中心交点越近, 其对该点灰度值的影响因子会越大, 作用力便越强, 反之则越弱, α 值也随之减小。β 用于调节插值算法的平滑效应。
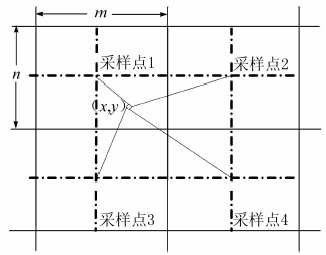 | 图1 点(x, y)的插值过程Fig.1 Interpolation process of point (x, y) |
设dk(x, y)为像元点(x, y)距离其周围第k(k=1, 2, 3, 4)个采样点的距离, 则距离加权值为
Wk(x, y)=
另设(x, y)点周围4个采样点对应图像块的映射函数分别为Tk, 则点(x, y)最终的映射值g(x, y)=
g(Im× n)=
具体操作步骤如下:
1)按照1.2节方法把影像划分为不同的子区域。
2)计算每个子区域的灰度直方图; 对每个子区
域的直方图进行直方图均衡化, 得到n个灰度变换映射函数, k=1, 2…n。
3)赋距离加权指数α 和平滑参数β 值。
4)按照式(10)求出Wk。
5)采用式(11)对由相邻4个采样点确定的图像区域进行增强。
6)对影像中所有区域重复步骤5), 最后完成整个影像的增强工作。
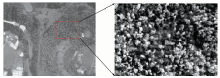
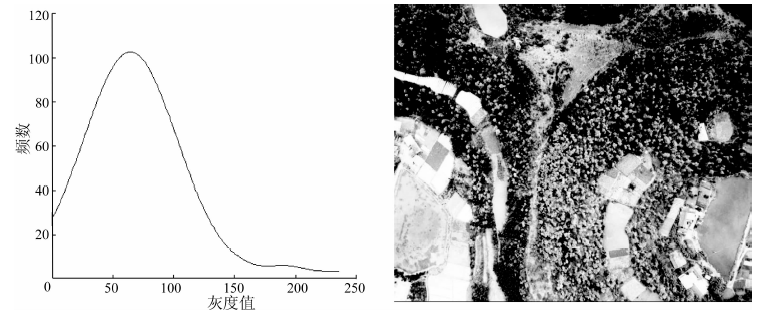
图2(右)为应用上述方法对原始影像(图2(左))处理后得到的增强效果图, 可以看出, 增强后的影像对比度更高。
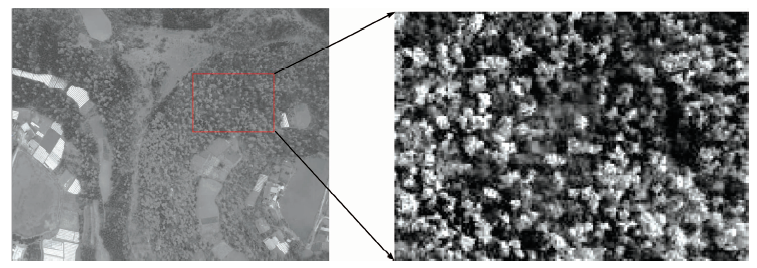 | 图2 原始灰度影像(左)及其局部区域增强效果(右)Fig.2 Original grayscale image(left)and its small area enhanced effect(right) |
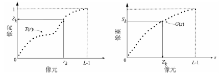
为了防止原始影像0级灰度附近的像元过于集中, 可利用较为合理的手段来修改影像直方图。修改直方图时, 首先要保持原始直方图的基本形状, 只是使较暗区域的影像有较为平滑的过渡, 如图3所示。
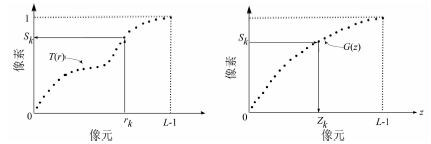 | 图3 从rk到sk灰度级映射过程Fig.3 Grayscale mapping process from rk to sk |
图(3)中T(r)为变换函数; G(z)为匹配的目标函数, 主要反映的是像元从灰度级rk转换为sk最终达到目标灰度级的过程。其中,
G(zk)=
首先绘制出增强后影像的直方图, 利用式(5)对灰度级rk预计算映射灰度级sk, 再通过式(12)计算出变换函数G, 完成从映射灰度级sk到最终灰度级zk的变换。指定直方图是对原始直方图的适当更改, 是在图像增强方面的重要改进。修改后的直方图最明显的特征是其低端移动到了接近灰度级的较亮区域, 从而接近所指定的形状。最终修改后匹配函数形状及增强效果如图4所示。图4(左)为根据原始影像直方图指定的匹配函数, 横轴代表输入灰度值, 纵轴代表对应灰度值出现的次数。
 | 图4 匹配函数形状(左)及其影像增强后效果(右)Fig.4 Matching function shape(left)and its enhanced effect(right) |
SIFT特征提取及匹配主要通过尺度空间和高斯卷积运算来实现, 能够在尺度空间检测到稳定的关键点, 把每一个采样点和它所有的相邻点进行比较, 从而提取差值较大的特征点。影像增强能够使影像域和尺度域相邻点的差值变大, 使特征点的方向梯度值变大, 从而更容易突出某些特征点的性质, 最终能检测出更多的特征点, 以增加匹配效果, 特别是在灰度变化较小的林地区域效果更加明显。
如图5所示, 增强后影像的很多像元的梯度有了较大增加, 主梯度方向的灰度差由原先的39增大到了80, 方便了利用SIFT算法进行特征点的提取及匹配。
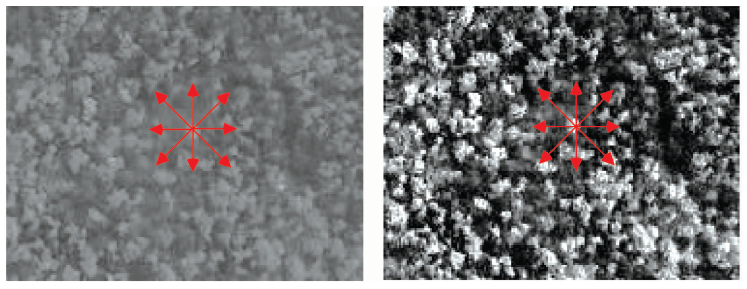 | 图5 影像增强前(左)、后(右)梯度变化Fig.5 Gradient changes before(left) and after(right) image enhenced |
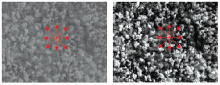
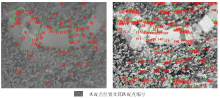
利用SIFT算子提取影像特征点并进行特征描述后, 根据核线约束法对影像进行匹配并剔除错误匹配点。经过对比大量增强前后影像在林区的同名点匹配情况, 匹配点数量比原影像增加了10%以上, 同时提取的特征点在整幅影像中的分布位置也更加均衡, 为后续的空三计算及制作正射影像提供了较好的帮助。图6为增强前后影像同名点的匹配结果对比图, 匹配点数量及均衡程度都比原始影
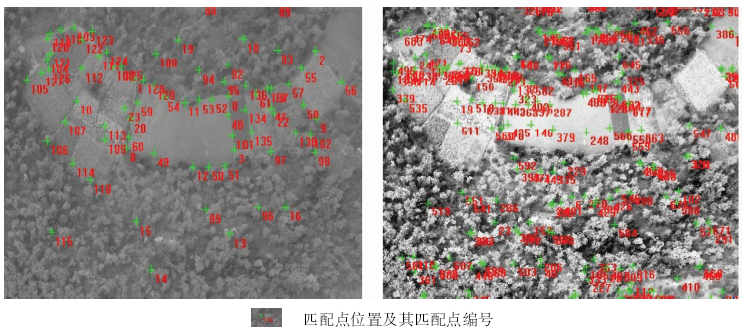 | 图6 影像增强前(左)后(右)同名点的匹配结果对比Fig.6 Matching point comparison before(left) and after(right) image enhanced |
像有了一定的提高, 特别是在灰度值普遍较低且变化较小的林地区域效果更加明显(表1)。
| 表1 影像增强前后数据对比 Tab.1 Data comparison before and after image enhanced |
1)本文利用局部影像增强方法使增强后影像的一些像元与周围像元的灰度梯度值变大, 突出了更多的特征点, 影像的均匀程度有了较大改善。
2)在以往的无人机影像局部增强方法的基础上, 通过划分不同灰度区域并分别采用不同变换函数的处理方法进行增强和修正, 在灰度变化较小的林地区域取得了较好的效果。
3)本文的研究还存在不足之处, 特别是在变换函数的选取方面还有待进一步研究, 以期对质量更差的影像在增强处理后能有更好的显示效果。
The authors have declared that no competing interests exist.
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|