


{kind=link}
{kind=link}
{kind=link}
{kind=link}
基于Canny边缘检测算子的矿区道路提取
[曾发明1  , 杨波
, 杨波1 , 吴德文2 , 唐攀科2 , 张建国2 , 张鸿键1 ]
, 杨波, 吴德文|
|


第一作者简介: 曾发明(1987-),男,硕士研究生,主要研究方向为资源环境遥感。E-mail:junkai1314@126.com。
矿区道路作为矿区的主要运输通道,是采矿活动必需的组成要素。在空间结构上,矿区道路是其他要素的连接纽带,它们之间有着重要的空间拓扑关系——矿区通常由一条主要道路连接着开采面(矿硐)、选矿池、固体废弃物、工棚建筑和尾矿库等要素。通过对矿区道路的识别和提取,有助于建立地表采矿系统(surface mining system,SMS),对矿区进行遥感监测和自动遥感解译。利用高分辨率遥感图像,提出一种基于Canny边缘检测算子的矿区道路自动提取方法: 首先利用Canny算子对遥感图像进行边缘检测,得到边缘信息; 然后进行边缘匹配,判定道路边缘,从而对研究区内的道路进行定位和矢量化。利用该方法对某矿区道路进行提取实验的结果表明,该方法能快速提取矿区道路,具有较强的实用性。
As the main transport corridors of the mine,the roads in the mining area are very important parts of the mining activities. Spatially,the roads are the connection links of the other elements in the mining area, and there are important topological relationships between them:The major road usually connects such elements as the mining surface area (or mine adit), the processing pool, the solid waste mineral, the shed (or buildings) and the tailings. The extraction and recognition of the mine road are helpful to building the surface mining system(SMS),making it easy to monitor the mining area and get automatic interpretation of remote sensing. In order to extract the mine road,the authors used high-resolution remote sensing image and proposed an approach based on Canny edge detection operator for automatic extraction of the road in the mining area in this paper. Firstly, the road edges were extracted by using the Canny detector. Furthermore, the edge matching method was used to determine the road edges, which resulted in the quantization and positioning of the road vector in the study area. The methods proposed in this paper were used to extract the road in the mining area successfully. The results show that the proposed method is of very strong practical applicability.
道路是地表采矿系统(surface mining system, SMS)中非常重要的线性要素。国内外对道路的研究已有20多年的历史, 众多学者针对不同的应用领域和数据源, 提出了自己的方法和研究成果[1, 2, 3, 4, 5, 6, 7]。Wiedeman等[8]利用剖面法在GIS数据的辅助下进行了从数字图像中自动识别道路的研究; Rellier等[9]利用马尔科夫随机场( Markov random field, MRF)模型研究了从SPOT图像中提取乡村道路的方法; Pete等[10]提出了人工平行边界提取(anti-parallel-edge centerline extraction, ACE)算法从高分辨率多光谱图像中自动提取道路中心线; Dal-Poz等[11]利用Canny算子, 加入道路先验知识, 从高分辨率航空图像中自动提取道路; Ye等[12]先用Canny算子获取道路边缘, 再利用粒子滤波提取道路; 吕健刚等[13]在图像分割获得道路网轮廓的基础上, 使用Hough 变换检测道路所在直线, 对直线进行判断, 再对所得道路段进行修剪、连接形成道路网, 实现道路提取; 董占杰等[14]根据高分辨率遥感图像中道路绿地形状和空间分布特征识别道路边线和中心线; 许高程等[15]在面向对象的分类过程中, 应用Canny算子加强了道路对象边界构建, 并针对实验区中的不同道路类型, 在不同尺度下进行了道路自动提取实验; Hang等[16]则对现有道路提取的研究成果和方法进行了归纳总结, 并针对彩色增强的遥感图像, 提出基于空间特征与光谱特征自动提取乡村道路和基于Gabor滤波提取城市道路的方法。上述道路提取算法大都得了较好的效果, 但仍然存在一些不足之处: ①结合GIS数据提取道路的方法大都建立在研究区已有GIS矢量数据的基础上, 因而限制了算法的使用范围; ②基于Hough变换的道路提取效果受直线长度阈值选取的影响, 若选取的阈值较大, 则不能提取出较短的直线以及微小弯曲的线, 若选取的阈值较小, 则会检测出许多非道路线段; ③基于数学形态学的道路研究, 其结构元素是数学形态学运算的核心, 结构元素的形状和大小将直接影响目标信息提取的结果; ④Hang等[16]的乡村道路提取方法汇集了众算法之长, 但也未能解决目标周边背景影响的问题; ⑤董占杰等[14]巧妙地运用了道路背景的上下文特征— — 绿地信息, 但不适用于缺少绿地信息的矿区道路提取。Dal-Poz等[11]和Ye等[12]利用Canny算子在建立道路先验模型基础上提取道路, 对本文有很大的借鉴作用, 但矿区道路与城市和居民区道路的属性有所不同— — 矿区道路只是矿石原材料的一个运输通道, 建设标准从简, 不符合城市和居民区道路规划的相关指标; 并且矿区泥路居多, 道路在光谱特征上易与周边耕地混淆, 道路的宽度也取决于矿石运输的情况。因此, 对矿山道路的提取还需要根据矿区的具体情况建立合适的提取模型。针对上述情况, 本文提出一种基于Canny边缘检测算子的矿区道路提取方法, 选取矿区3种典型单一背景道路(开采场道路、矿区山间道路和矿区周边乡间道路)作为研究对象, 进行道路提取实验; 并进一步做综合背景下的道路提取实验对比, 以证明用该方法快速提取矿区道路的实用性。
Canny边缘检测算子是Canny[17]在1986年提出的, 是当前被普遍认可的一种较理想的边缘检测算法。本文的算法是在Canny算子的基础上增加长度搜索和边缘平移匹配得到的, 具体步骤如下:
1)用高斯函数G (x, y)对图像 f (x, y)进行平滑滤波以去除噪声, 得到平滑图像g(x, y), 即
G(x, y)=
g(x, y)=f(x, y)G(x, y)。 (2)
2)计算平滑图像g(x, y)中每个像元点(x, y)的梯度强度▽g(x, y)和方向, 即
▽g(x, y)=▽[G(x, y)f(x, y)]=▽G(x, y)f(x, y)。 (3)
利用高斯函数的可分性, 将G(x, y)分解为2个一维的列、行滤波器, 即
式中:
将式(4), (5)分别与图像f (x, y)做卷积运算, 得到
则图像g(x, y)中每个像元点(x, y)的梯度强度▽g(x, y)和梯度方向θ (x, y)分别为
|▽g(x, y)|=
θ (x, y)=arctan
3)仅仅得到全局的梯度并不足以确定边缘。因此, 为确定边缘, 必须对所得的梯度进行非极大值抑制。具体做法为寻找图像梯度中的局部极大值点, 并设非局部极大值点为零, 从而使图像边缘得到细化。
4)设置全局高、低2个阈值, 选取边缘点。其过程为: 设置T1和T2( T1 > T2)两个阈值, T1的作用是找到每条边缘线段; T2则是用来延伸这些线段以寻找边缘的断裂处, 并对这些边缘进行连接。如果所取像元点为大于T2的集合, 那么获得的边缘信息一般都是真正的图像边缘信息, 很少会包含假的边缘信息, 但也可能会丢失一些边缘的细节信息; 如果所取像元点的梯度值介于T1和T2之间, 那么通过计算获得的边缘信息保留得比较好, 但同时可能将一些不是边缘点的信息也保留下来。因此, 可以先取出由像元点梯度值大于T2的集合所组成的图像边缘信息, 再用像元点梯度值介于T1和T2之间的计算结果补充先前得到的图像边缘信息, 最终综合得到待检测图像的边缘信息。
5)根据长度阈值, 进行道路边缘对象的判定: ①设置1个中间变量i = 1; ②以任意1个边缘点为起点, 追踪经过该点的边缘线; ③统计边缘上边界点的数目; ④将边缘线上的边界点数目作为道路段长度, 再与设定的阈值比较— — 若长度小于阈值, 则认为不是道路边缘, 将其设置成背景值, 以免下次重复遍历; 若大于阈值, 则获取该边缘线起止端点, 如果构成回路, 则说明其可能是建筑等面状地物, 将边缘线上所有点设置成背景值; 若大于阈值且搜索起点和终点不构成回路, 则将其编号, 进入下一平移匹配阶段。
6)平移匹配: ①将步骤5)得到的边缘对象沿该边缘线2端点的连线方向朝4邻域方向平移, 寻找与之平行的匹配边缘; 若找不到匹配平行边缘, 则说明该边缘不是道路边缘, 将该边缘背景化; 若匹配成功, 则提取出平行线对, 并平滑连接该线对, 将其位置信息存储到对象数组Ri中; ②将匹配成功的边缘对设置成背景值, 以避免在下次循环中重复搜索; ③i=i+1, 返回步骤5)中的②处, 开始重新寻找起始边缘点。重复步骤5)和6), 直至所有边缘点遍历完成, 即边缘信息图中所有的点都被设置成背景值后, 算法结束。边缘检测流程图见图1。
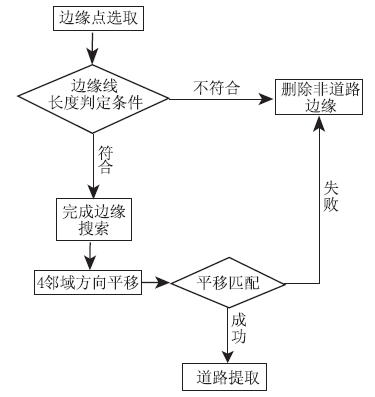 | 图1 边缘匹配检测流程Fig.1 Flow chart of edge matching and detection |
1.2.1 边缘跟踪
边缘跟踪采用8邻域搜索方法— — 从一边缘前景像元开始, 搜索该像元与其相邻的8个像元, 分别标记为E(东)、ES(东南)、S(南)、WS(西南)、W(西)、WN(西北)、N(北)和EN(东北), 并记录下其中边缘点的位置和梯度方向。城区道路最明显的特点是道路相互交错, 形成道路网。而矿区道路用途单一, 通常由一条主要道路连通着开采面、固体废弃物和工棚建筑, 且各路段间多为“ 人” 字分叉, 较少见“ 十” 字路口。所以, 相对城区道路来说, 矿区道路在边缘跟踪时, 可依据道路的方向在一定区间内保持不变的特性, 首先延续上一个像元的梯度方向进行跟踪, 这样可以将最大搜索长度从8降为5。比如前一个跟踪点方向为S, 那么下一步跟踪就先搜索S方向的像元, 如果能搜索到, 则从下一个点继续在S方向搜索跟踪; 如果没有搜索到, 则搜索ES方向; 若还是没有, 则搜索WS方向; 若WS方向没有, 就再搜索E方向; 如果E方向也没有, 再搜索 W方向。如果在S, ES, WS, E和W方向都搜索不到下一个边界点, 则跟踪终止。
1.2.2 像元定位
矿区道路与其他类型道路最明显的区别是道路与矿区开采场、固体废弃物堆以及工矿建筑之间的空间拓扑连接关系。因此, 对于矿区道路进一步的研究, 就需要快速定位道路像元在图像矩阵A中的坐标值(x, y)。相反, 若已知(x, y)的值, 就需在图像中快速找到该像元。因此, 本文将图像视为二维数组, 其元素按列存储, 例如二维数组A=
Index=i+m(j-1), (i< m, j< n)。 (11)
根据式(11)可对图像数组进行一维的遍历搜索, 实现像元的快速定位。
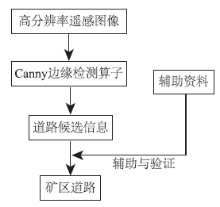
首先对高分辨率遥感图像进行预处理, 再通过Canny边缘检测算子对图像进行边缘检测和道路边缘匹配, 得到道路候选边缘; 然后根据辅助资料对冗余道路进行修剪、平滑和连接处理, 最终得到道路矢量(图2)。
 | 图2 道路提取实验流程Fig.2 Experimental process of road extraction |
在SPOT5卫星遥感图像中选取矿区开采场道路、矿区山间道路和矿区周边乡间道路等3种不同背景的道路作为实验对象, 分别利用本文方法进行道路提取实验, 结果如图3所示。
 | 图3 单背景矿区道路提取实验Fig.3 Road extraction experiment of simple background |
单背景矿区道路的提取实验结果表明:
1)矿区开采场道路(图3(a))为靠近开采作业点的道路段, 直通选矿厂或废石弃土堆放处; 道路一般较为简易, 道路端口易见矿石原料堆或固体废弃物。由于开采场地表植被一般已被剔除, 物质成分主要以矿产采掘剥离的泥土为主, 部分夹杂岩石和矿石原材料, 所以水泥路基的道路与开采场反差较大, 比较容易区分。但是, 此类道路常伴随新增矿硐或者开采场, 会出现新开辟的土路, 在光谱特征上易导致部分道路与周围开采面或裸地混淆。
2)矿区山间道路(图3(b))处于开采场与选矿池之间, 道路弯曲复杂, 多分布于山林之间, 路面与周围背景反差较大, 容易区分。但是由于常年运输, 道路两旁会因车辆卸漏或者人为倾倒而出现矿石等固体堆积现象, 在光谱特征上易将矿石卸漏物覆盖区域与道路路面混淆。
3)矿区周边乡间道路(图3(c))宽度相对较窄, 而且多细小分支, 分布于农田之间, 道路形状弯曲度相对较小, 端点多终止于村庄。
4)经过本文改进的Canny算法的边缘提取处理, 道路边缘信息能够被完整地检测出来, 同时也附带检测出其他地物的边缘; 但主要道路在众多的边缘信息中能够准确地被提取出来。
5)在Canny边缘检测图像中, 由于植被的颗粒性, 树林和农田等的边缘信息显示为稠密而复杂的不规则边缘; 而道路由于内部物质相同且分布均匀, 显示为一对中空的平行线(但也有部分冗余的边缘线段)。
6)从图3的实验结果图像可以看出, 处在山间的矿山道路因其与周围背景对比度大, 干扰少, 容易提取; 矿区乡间道路的主干道能被完整地提取出来, 但其细小分支容易丢失; 矿区开采场附近的道路则呈现道路一侧或端点处有矿硐、中转场或者固体废弃物堆分布, 近开采场处路段相对较短, 并且弯曲度大等特点。
在SPOT5遥感图像中选取一个具有代表特征的矿点作为研究对象(图4(a)), 进行道路提取实验。在该矿点中, 尾矿库、工矿建筑、废矿堆、水塔和道路等地物清晰可见。其中, 道路有黄土路, 也有水泥路(夹杂在工矿建筑之间和尾矿库库坝), 还有一些穿插在树木和耕地间的小道。
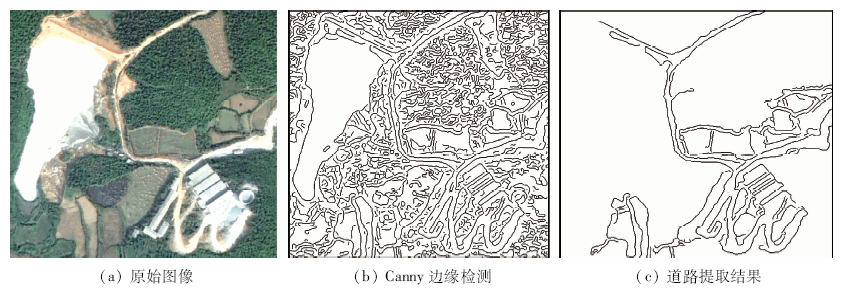 | 图4 综合背景矿区道路提取实验Fig.4 Road extraction experiment of complex background |
由图4(b)和(c)可看出, 在综合背景下, 本文算法不仅能完整地提取出主要矿区道路的干道, 也能识别出部分黄土小道和田埂道, 达到了预期效果。但也有不足之处: ①在实际的复杂背景环境中, 矩形建筑、平行的绿化带和部分细长的耕地块也被误识别为道路; ②道路的宽度受矿区环境影响较大, 有些路段变形较严重; ③一些与道路边缘连在一起的非道路边缘, 也被错误地当成道路对象提取出来。
为了评估矿区道路提取算法的准确性, 本文借鉴Wiedemann提出的自动道路提取系统的评估方法, 采用“ 完整率(completeness)” 、“ 正确率(correctness)” 和“ 质量(quality)” 等3个评价指标进行了评估(表1)。
| 表1 矿区道路提取精度 Tab.1 Accuracy of mine road extraction (%) |
完整率completeness为提取道路的正确部分与实际道路之间的比值, 即
completenes=TP/(TP+FN)。 (12)
正确率correctness为提取道路的正确部分与提取道路总长度的比值, 即
correctness=TP/(TP+FP)。 (13)
质量quality为提取道路的正确部分与提取道路总长度及不匹配道路部分总和的比值, 是“ 完整率” 和“ 准确率” 的综合计算值, 即
quality=TP/(TP+FN+FP)。 (14)
式(12)— (14)中: TP为提取道路中的正确部分; FN为实际道路中未被提取出道路的遗漏部分; FP为提取道路中的错误部分。
实验精度评价指标表明, 本文算法能较完整地提取出图像中的矿区道路, 完整率在93.3%以上; 正确率和提取质量在单一背景下相对较高, 而在综合背景下有所降低, 可能是因为图幅增大和计算量增加, 但总体在80%以上。
1)利用本文改进的Canny算子和边缘匹配算法对矿区道路进行提取实验, 结果表明, 该算法能够在矿区快速地提取出道路, 在单一背景下, 矿区道路提取的正确度率达到95%以上; 而在复杂的干扰性较强的综合背景下, 正确率也有80%。
2)该算法的不足之处在于: ①道路提取精度依赖于边缘检测算子, 如果边缘检测算子的道路边缘连接有非道路边缘, 在边缘匹配提取时很难自动去除非道路边缘, 需人工干预去除冗余线段; ②该算法是针对高植被覆盖矿区提出的, 旨在通过遥感图像快速获取地表采矿系统(SMS)的线性要素矢量数据。在单一背景下, 其辨别速度较快; 而在综合背景下, 由于计算量和干扰物相应增加, 该算法对道路的判别正确率也相应下降; ③对于矿区存在的主道和支路的道路宽度不一问题, 该算法中还需建立更多的匹配规则, 运用诸如同质性、空间特征或数学形态学等方法加以改进。这些也是笔者下一步要研究的问题。
The authors have declared that no competing interests exist.
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
|
| [17] |
|