





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
结合海岸类型和潮位校正的海岸线遥感提取
[张旭凯1, 2  , 张霞
, 张霞1 , 杨邦会1 , 庄智1, 2 , 尚坤1, 2 ]
, 张霞, 杨邦会|
|


第一作者简介: 张旭凯(1987-),男,硕士研究生,主要从事遥感信息提取方面的研究。E-mail:zhangxk@irsa.ac.cn。
不同类型的海岸具有不同的地物特征,单一算法无法保证海岸线提取精度。针对现有研究多为利用遥感图像进行瞬时水边线提取,从而缺少潮位校正和精度验证的问题,该文提出一种结合海岸类型和潮位校正的海岸线遥感提取方法。以秦皇岛市海岸为例,采用高分辨率SPOT4卫星图像进行瞬时水边线提取,提取方法包括最小噪声分离变换、改进的归一化差异水体指数、数学形态学方法和改进的Canny边缘检测方法,并根据潮位数据计算潮滩坡降,从而准确获取海岸线。利用同时期海岸线实地GPS测量数据对遥感提取的海岸线进行精度验证。结果表明,使用该文方法提取的海岸线精度较高。
The accuracy of coastline extraction can't be guaranteed by applying a single algorithm,because different types of coasts have different characteristics. The existing researches are mostly focused on the extraction of instantaneous waterline,with the lacking of tidal correction and verification of accuracy. In this paper,the authors presented a method combining coastline extraction with coastal type and tidal correction. MNF rotation,MNDWI,morphology and edge detection were applied to SPOT4 data acquired in Qinhuangdao coastal zone to extract instantaneous waterline. Besides,the coastline was extracted accurately by integrating tidal data to calculate the slope of shoal. Moreover,the verification of the accuracy of coastline extraction was achieved by the GPS data obtained in the same period. The results show that the precision of coastline extraction by the method proposed in this paper is high.
海岸线是海陆交界线, 包括大陆海岸线和岛屿海岸线[1]。基于不同学科的研究目的, 海岸线的具体定义和划分位置有所不同。我国现有海洋管理工作的实践都是以平均大潮高潮线作为海陆分界线[2, 3], 本文同样将海岸线定义为平均大潮高潮线。精确的海岸线位置不仅是划分海陆行政管理区域的基础, 而且是区分海洋深度基准和陆地高程基准的保证。因此, 海岸线探测是海道测量、地图测绘、海岸带调查、海岸和海域管理等的重要内容, 从而可获得重要的基础地理数据[4, 5]。
相对于传统海岸线探测手段, 遥感技术以高时效、大范围、动态性等特点逐渐成为高效快捷的海岸线提取技术。海岸线遥感提取技术建立在传感器可对不同地物分界线进行探测基础之上[6]。随着传感器性能的提升, 越来越多的专家学者开始利用遥感手段快速而准确地提取海岸线。
由于受潮汐等因素的影响, 从遥感图像上直接提取的水陆交界线并不是真正意义上的海岸线, 只是卫星过顶时刻的瞬时水边线[7], 而正好位于平均大潮高潮线的水边线则较难获取。所以, 要想获取真正的海岸线, 需要将水边线进行潮位校正至平均大潮高潮线。目前, 国内外对于遥感提取海岸线的研究多集中于水边线的自动提取, 虽然考虑到潮位的影响, 但缺少具体的潮位校正过程。现有的水边线提取方法主要包括阈值分割法[8]、边缘检测法[9]、主动轮廓模型法[10]、区域生长提取法[11]、神经网络分类法[12]和元胞自动机方法[13]等。上述方法多利用单一算法进行水边线提取, 事实上, 不同类型的海岸具有不同的地物特征, 其水边线也相应具有不同的特点, 单一算法不能保证提取精度。针对以上问题, 本文结合最小噪声分离(minimum noise fraction, MNF)变换、改进的归一化差异水体指数(modified normalized difference water index, MNDWI)、数学形态学方法和改进的Canny边缘检测方法, 根据不同海岸类型采取相应的水边线提取算法。黄海军等[14]和马小峰等[15]均提出过潮位校正的思路, 并且马小峰还给出水边线至高潮线水平距离的计算过程。然而, 现有的潮位校正研究尚有不足: ①未给出2景图像上水边线距离的具体量测方法; ②未给出潮位校正中水边线移动方向的确定方法。针对以上不足, 本文以研究区内部分砂质海岸水边线为例, 具体阐述潮位校正的方法和过程, 并利用潮位数据对水边线进行校正, 获取海岸线。经GPS实测数据验证, 本文海岸线遥感提取精度较高。
研究区为河北省秦皇岛市海岸带地区, 位于E119° 28'~ 119° 44', N 39° 48'~ 39° 57'之间(图1)。秦皇岛处于最具发展潜力的环渤海经济圈中心地带, 是我国东北与华北2大经济区的结合部。研究区内海岸类型丰富, 主要包括自然海岸中的砂质海岸、基岩海岸和淤泥质海岸, 以及人工海岸的码头。
 | 图1 秦皇岛海岸带研究区Fig.1 Study area of Qinhuangdao coastal zone |
本文选用SPOT4全色图像(空间分辨率10 m)和多光谱图像(空间分辨率20 m)各2景, 其分别于2009年10月10日和2011年10月1日获取。其中, 多光谱图像波段范围为绿波段(500~590 nm)、红波段(610~680 nm)、近红外波段(780~890 nm)和短波红外波段(1 580~1 750 nm)。图像经过辐射校正和几何精纠正等预处理, 几何纠正误差控制在0.5个像元以内。
由于在提取水边线时需要用到光谱信息和空间信息, 为提高海岸线提取的准确性, 特将预处理后的全色图像和多光谱图像进行融合处理, 以提高多光谱图像的空间分辨率。利用Gram-Schmidt正交化算法对SPOT4全色图像和多光谱图像进行融合。该算法能较好地保持空间纹理信息, 是一种高保真的遥感图像融合方法[16]。
本文所用数据还包括秦皇岛验潮站2006— 2011年的潮位数据和2011年9月秦皇岛研究区海岸线实地GPS测量点数据(根据各种类型海岸带的分布范围, 分别获取50个砂质海岸测量点、20个人工海岸测量点、20个基岩海岸测量点和10个淤泥质海岸测量点数据, 获取标志参照夏东兴等[3]的研究)。其中潮位数据用于水边线的潮位校正, GPS测量点数据用于对提取的海岸线进行精度验证。
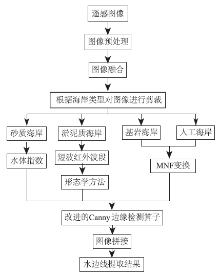
滨海地带的瞬时水边线大多不是真正的海岸线, 但通过遥感图像提取水边线是海岸线提取过程中非常关键的一步。本文根据不同海岸类型采取相应的水边线提取方法, 具体技术流程如图2所示。
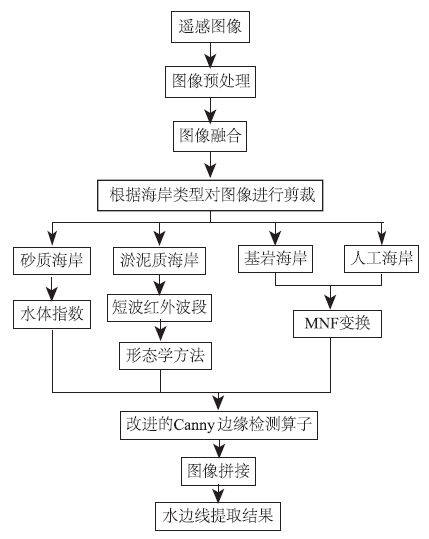 | 图2 水边线提取技术流程Fig.2 Technical flow chart of waterline extraction |
基岩海岸由坚硬的岩石组成, 波浪作用是其形成的主要动力。基岩海岸常有突出的海岬和深入陆地的海湾, 海岸线较为曲折。研究区内基岩海岸具有较明显的曲折状态和岩石构造, 在遥感图像中水陆分界明显。人工海岸是改变原有自然状态、完全由人工建造、并具有生产或生活功能的海岸。研究区内人工海岸重要组成之一是秦皇岛港煤码头, 在遥感图像中形状规则, 水陆分界明显。
由于基岩海岸和人工海岸在遥感图像中都具有较明显的水陆分界, 利用边缘检测便可提取水边线。边缘检测算子是利用图像灰度梯度变化信息, 不考虑海岸线的背景差异, 因此获得的海岸线位置一般较为准确。但其受遥感图像中噪声点的影响, 检测的边缘容易发生中断, 所以在边缘检测之前要先对图像进行去噪。本文针对SPOT4多波段图像, 采用MNF变换选取噪声最小波段, 结合改进的Canny边缘检测算子[17]进行基岩海岸和人工海岸水边线的提取。MNF变换在本质上是2次层叠的主成分变换: 第1次变换是利用估计的噪声协方差矩阵分离和重新调节数据中的噪声; 第2次变换是对噪声“ 白化” (均值为“ 0” 、方差为“ 1” 的线性变换)数据的标准主成分变换。改进的Canny边缘检测算子主要是针对最后一步的双门限参数(低门限t1和高门限t2), 结合Otsu[18]提出的阈值算法选择t2, 利用
t1=0.5 t2(1)
确定t1。
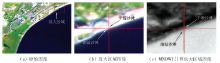
改进的Canny边缘检测算子可很好地抑制虚假边缘的产生。以2011年SPOT4图像为例, 基岩海岸和人工海岸的水边线提取效果分别如图3和图4所示。
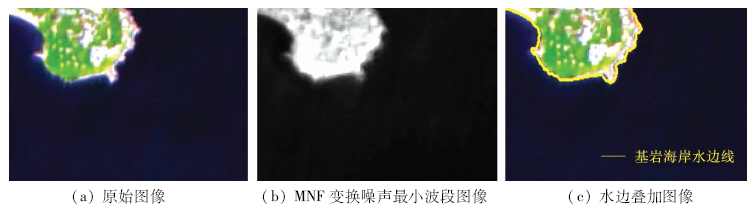 | 图3 基岩海岸水边线提取效果Fig.3 Waterline extracted from bedrock coast |
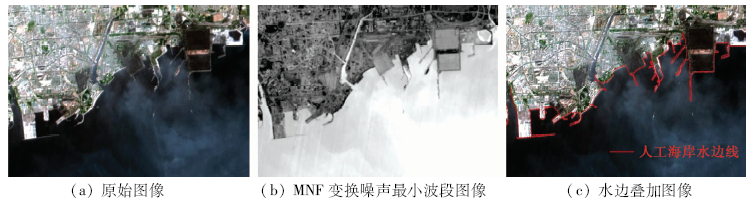 | 图4 人工海岸水边线提取效果Fig.4 Waterline extracted from artificial coast |
由于SPOT4图像数据没有蓝波段, 不能直接合成图像。本文RGB分别采用红波段、[(绿波段× 3+近红外波段)/4]、绿波段, 组合生成图像(图3(a)和图4(a))。MNF变换噪声最小波段图像(图3(b)和图4(b))可以很好地抑制噪声, 同时可更好地突出水陆边界。从基岩海岸和人工海岸水边线叠加图像(图3(c)和图4(c))中可以看出, 用本文算法提取的水边线与原始图像叠加显示的效果较好。
砂质海岸是由粒级大于0.1 mm的砂组成的海岸, 主要由波浪作用塑造而成。砂质海岸的干燥滩面反射率较高, 在遥感图像上表现为较亮区域; 潮湿滩面反射率较低, 在图像上表现为较暗区域; 海水反射率最低, 在图像上表现为最暗区域。遥感图像瞬时水边线应为潮湿滩面和干燥滩面的分界线, 由于此分界线并不明显, 若直接提取, 则精度不高。针对此问题, 本文采用MNDWI[19]来增大潮湿滩面和干燥滩面的差异, 即
MNDWI=(Green-MIR)/(Green+MIR), (2)
式中Green和MIR分别代表绿波段和中红外波段亮度值, 在SPOT4图像中分别为第1和4波段。砂质海岸图像经MNDWI计算后的效果如图5所示。
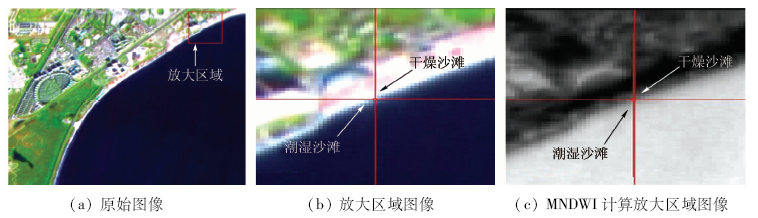 | 图5 砂质海岸MNDWI计算图像效果Fig.5 MNDWI calculated from sandy coast |
图5(b)和图5(c)中的红色叉丝位置相同, 且位于水边线处; 红色叉丝上方为干燥沙滩, 下方为潮湿沙滩。可以看出, 在经过MNDWI计算的图像中, 干燥沙滩区域被抑制显示, 潮湿沙滩区域被突出显示, 二者分界线更加明显。
经过MNDWI计算, 同样利用改进的Canny边缘检测算子可以有效地提取水边线, 结果如图6所示。将本文算法提取的砂质海岸水边线与原始图像进行叠加, 效果较好; 结合MNDWI可使砂质海岸水边线更明显, 水边线提取精度更高。
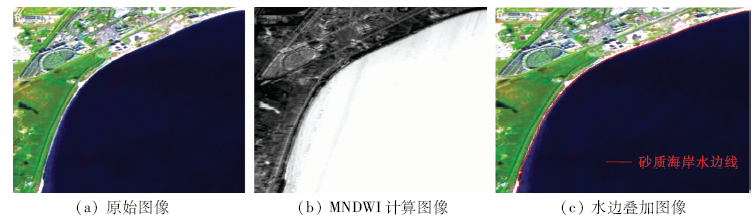 | 图6 砂质海岸水边线提取效果Fig.6 Waterline extracted from sandy coast |
淤泥质海岸主要由平均颗粒直径0.001~0.01 mm的淤泥组成, 受上冲流的影响, 淤泥质海岸滩面坡度平缓, 滩面较宽。研究区内淤泥质海岸主要位于北戴河湿地, 并且未被开发利用。由于淤泥质海岸水沙混合, 边界比较模糊, 使水边线提取有一定难度。王李娟等[20]分别利用Sobel算子和MNDWI对淤泥质海岸线进行了提取, 其中利用Sobel算子提取的结果准确度更高。潮滩含水量较高, 与海水的辐亮度在绿波段和中红外波段的变化趋势相似, 这是由于利用MNDWI提取淤泥质海岸水边线效果较差。针对此问题, 本文在以上研究的基础上, 首先利用形态学方法对SPOT4的短波红外波段图像进行处理。SPOT4的短波红外波段具有较强的大气穿透能力, 使得图像上的地物、地貌更加清晰。相对于SPOT4的其他波段, 短波红外波段对土壤湿度的变化更加敏感, 可以更准确地反映淤泥质海岸地表水分含量; 但同时会产生更多的碎边缘, 从而影响边缘检测的效果。利用数学形态学方法可以很好地消除碎边缘, 从而形成相对闭合的海陆轮廓[21]。
基本的形态学算子包括膨胀、腐蚀、开运算和闭运算。为了消除潮滩中一些较小的暗色区域, 本文首先对SPOT4的短波红外波段图像进行取反, 得到S1, 将暗色区域突出显示; 然后利用腐蚀算子进行处理, 消除较小的暗色区域, 得到S2; 将腐蚀后的图像S2和取反图像S1进行形态学重构, 得到S3, 可以去除部分噪声且保持影像边缘信息不变; 最后对S3取反得到S4, 并对S4进行闭运算(先膨胀、后腐蚀), 完成形态学处理过程。再利用改进的Canny边缘检测算子进行水边线提取, 结果如图7所示。
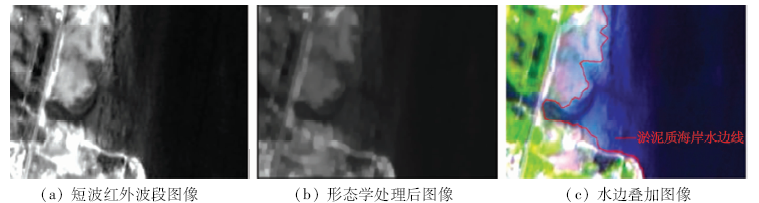 | 图7 淤泥质海岸水边线提取效果Fig.7 Waterline extracted from muddy coast |
根据不同海岸类型分别提取水边线, 并对其进行拼接, 得到研究区整体水边线提取结果(图8)。
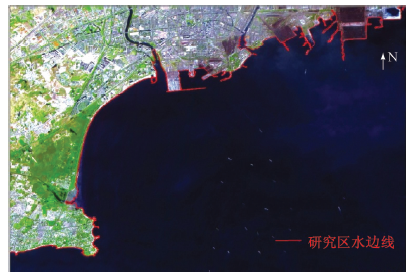 | 图8 研究区海岸线提取效果Fig.8 Waterline extracted from the study area |
对比图7(a)和图7(b)可以看出, 在形态学处理后的图像中破碎边缘减少, 海陆轮廓相对闭合, 更加有利于水边线的提取; 图7(c)中水边线提取结果与原始图像叠加显示的效果也较好。
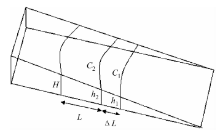
结合海岸类型已成功提取出的研究区内4种海岸类型水边线, 并从定性角度验证了其较好的效果。然而, 砂质海岸和淤泥质海岸的海岸线位置受潮位影响较大, 需要对水边线进行潮位校正, 才能获得准确的海岸线。潮位校正一般根据卫星成像时刻的潮位高度、平均大潮高潮位高度以及海岸坡度等信息计算出水边线至高潮线的水平距离, 从而确定海岸线的位置[4]。其原理如图9所示。
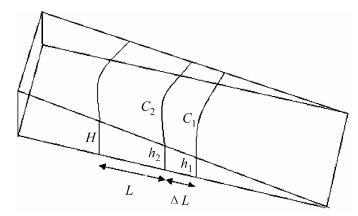 | 图9 潮位校正原理Fig.9 Principle of tidal correction |
图9中的C1和C2为2景不同时刻图像中提取出的水边线, 在图像上量出C1和C2水边线的距离, 设为△ L; 同时设2景图像中卫星过顶时刻的潮位高度分别为h1和h2(假设h2> h1), 则岸滩坡度为
Ø =arctan[(h2-h1)/Δ L] ; (3)
水边线至海岸线的距离为
L=(H-h2)/ tanØ , (4)
式中H为平均大潮高潮位高度, 可根据多年潮位观测资料得到。
瞬时潮高(以h1为例)为
h1=H1-h/2× [1-cos(t/T × 180)], (5)
式中: H1为当日高潮的高程; h为当日的潮差; T为落潮历时; t为高潮时至图像获取时的时间间隔。
根据潮位校正原理, 本文收集了位于研究区内的秦皇岛验潮站2009年10月10日和2011年10月1日的潮位数据(包括当日高潮位高度H1、高潮潮时T1、低潮位高度H2、低潮潮时T2和2005— 2011年平均大潮高潮位高度H); 通过遥感数据头文件信息得到图像获取时刻T3; 计算当日潮差h, 即
h=H1-H2。 (6)
落潮历时
T=T2-T1, (7)
和高潮时至遥感图像获取的时间间隔为
t=T3-T1 。 (8)
将式(6)— (8)代入式(5), 可得到2景SPOT图像获取时刻的瞬时潮高。经计算, 2009年10月10日的瞬时潮高h2=167.52 cm, 2011年10月1日的瞬时潮高h1=138.39 cm。
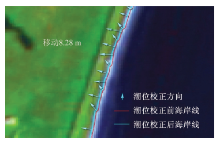
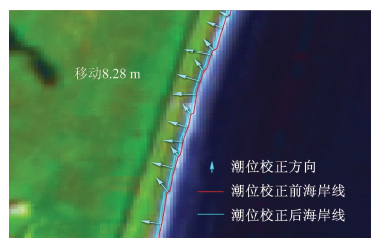
首先, 分别提取2009年和2011年砂质海岸水边线, 经量测总长均接近6 700 m; 然后, 假设该段砂质海岸各处的坡度相同, 在2009年砂质海岸水边线上每隔100 m取1个点, 共取67个点; 计算67个点到2011年水边线的平均距离Δ L=5.29 m, 并连同先前所得的h1, h2和H代入式(3)和(4), 得到2011年水边线至海岸线的距离L=8.28 m; 最后, 将2011年水边线向陆地方向移动8.28 m, 可获取2011年的海岸线位置。提取的海岸线是由多条线段组成的折线(图10), 陆地方向为每条线段的垂线方向(指向陆地一侧), 将每条线段按其垂线方向分别移动8.28 m, 得到最终的2011年海岸线位置。
针对目前的研究大多缺乏对海岸线提取精度定量验证的问题, 本文利用与2011年遥感图像同期获取的海岸线实地GPS测量点进行精度验证, 海岸线实地测量点均匀分布于研究区中。精度验证的内容包括海岸线实地测量点与所提取海岸线的距离偏差的最小值、最大值、平均值、标准差以及距离偏差超过5 m的点数, 验证结果如表1所示。
| 表1 海岸线提取精度验证结果 Tab.1 Accuracy verification results of coastline extraction |
从表1可以看出, 4种类型海岸线提取精度均较高, 距离偏差的最大值均小于10 m(1个像元)。经过潮位校正的砂质海岸线与实地测量点距离偏差的平均值和标准差都较小, 说明本文方法提取砂质海岸线精度较高并且提取结果较稳定。淤泥质海岸线虽然经过潮位校正, 但与实地测量点距离偏差的平均值却最大, 说明其提取精度在4种海岸类型中最低; 但其距离偏差的标准差最小, 说明距离偏差波动不大。这是因为研究区内淤泥质海岸分布于湿地保护区域, 而实地测量点位于湿地边缘, 难以深入湿地内部, 因此在一定程度上影响验证精度。
对基岩海岸和人工海岸采取相同的海岸线提取方法, 二者提取精度有所差别, 基岩海岸距离偏差的平均值和标准差大于人工海岸。这与研究区内基岩海岸实际特征有关, 虽然它和人工海岸都具有明显的水陆分界, 但是基岩海岸的岩石往往并不是呈90° 的竖直面, 导致无法保证基岩海岸实地测量点全部位于水陆边缘, 验证精度略低于人工海岸。根据各种海岸分布范围均匀选取的100个实地测量点中, 共有82个点与所提取海岸线的距离偏差小于5 m(0.5个像元); 100个实地测量点与所提取海岸线的距离偏差均小于10 m(1个像元), 提取精度较高。
1)采用高分辨率SPOT4图像对秦皇岛市海岸进行瞬时水边线提取, 并结合潮位数据计算潮滩坡降, 从而准确获取海岸线。根据研究区内4种海岸类型的不同特征, 提出水边线综合提取策略: 基岩海岸和人工海岸采取MNF变换和改进的Canny边缘检测算子提取水边线; 砂质海岸采取水体指数和改进的Canny边缘检测算子提取水边线; 淤泥质海岸采取形态学增强和改进的Canny边缘检测算子处理短波红外波段提取水边线。
2)利用验潮站数据和多时相遥感图像对水边线进行潮位校正, 与其他潮位校正研究相比, 本文给出了2景图像上水边线距离的具体量测方法和水边线移动方向的确定方法。
3)利用同时期海岸线实地测量数据对海岸线遥感提取进行精度验证的结果表明, 使用本文方法提取的海岸线精度较高。
1)根据海岸类型进行相应水边线的提取, 主要是根据先验知识进行图像裁剪, 在得到各海岸类型的图像上实现的。下一步研究可针对海岸带的自动分类问题, 利用分类技术自动获取海岸带分类图像, 从而提高海岸线提取的自动化程度。
2)结合验潮站数据和多时相遥感图像进行水边线潮位校正, 得到较准确的海岸线位置。但是, 本文在计算水边线移动距离的过程中, 将海岸各处坡度假设是相同的, 并未充分考虑大范围海岸的坡度变化问题。下一步研究可利用LiDAR等新技术进行潮滩DEM的获取, 进而利用DEM结合遥感图像进行潮位校正, 以提高潮位校正精度。此外, 如果研究区内不设有验潮站, 无法直接利用验潮站数据进行潮位校正, 可对邻近区域验潮站数据进行插值计算, 从而得到研究区潮位数据, 实现潮位校正。
3)由于研究区淤泥质海岸属于湿地保护区, 海岸线的实地测量存在困难, 验证所取的海岸线测量点均位于湿地边缘, 从而影响了验证精度。未来的研究可尝试利用更高分辨率的遥感图像进行验证。
The authors have declared that no competing interests exist.
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
|
| [17] |
|
| [18] |
|
| [19] |
|
| [20] |
|
| [21] |
|