
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
LiDAR点云与影像相结合的建筑物轮廓信息提取
[李云帆 , 龚威平, 林俞先, 汪波]
, 龚威平, 林俞先, 汪波]
, 龚威平, 林俞先, 汪波]
|
|


第一作者简介: 李云帆(1984-),男,工学博士,工程师,主要从事机载LiDAR数据与影像处理、3S技术在城市规划管理领域的应用等方面的研究。Email:ztqs9901@163.com。
分析机载LiDAR点云与影像数据特点,提出了一种建筑物点云与配准后影像相结合的建筑物轮廓信息提取方法。首先,采用α-shapes算法从点云中提取粗糙的建筑物轮廓多边形; 然后,采用基于线支撑区域的直线段提取算法从影像中提取边缘信息,并利用投票机制,以点到直线的距离为因子,从中过滤出真实的建筑物边界; 最后,提出一种建筑物轮廓精化的新方法,利用从影像中提取的边缘信息修正从点云中提取的粗糙轮廓,并对修正后的轮廓采用道格拉斯-普克算法去除冗余节点,采用强制相交方法恢复建筑物转角,最终得到了准确的建筑物外轮廓多边形,并通过实验验证了该方法的有效性。
A method for extracting building boundaries using airborne LiDAR point cloud data and imageries is proposed in this paper. Firstly, an α-shape algorithm is used to extract the rough outline of buildings from point clouds. Then building edge line segments are extracted from the registered images by an straight line segments extraction algorithm based on line region support. By using voting mechanism and point-to-line distance, the true boundaries of the buildings are obtained. Finally, a new method for refinement of a building outline is put forward, in which the extracted edge information is utilized to correct the rough outline extracted by the point cloud image, and the revised outline is processed by Douglas - Peucker algorithm to remove redundant nodes. the force intersect method is employed to restore the corner of the building, and finally the accurate outside contour polygons of the building is obtained. The effectiveness of the proposed method has been verified by experiments.
建筑物作为一种重要的地理空间信息要素, 在城市规划与建设、交通管理、房地产以及灾害损失评估等领域占有极为重要的地位[1, 2, 3, 4, 5]。机载激光雷达(LiDAR)是一种新型的主动传感器, 通过集成定姿定位系统和激光测距仪, 可直接获取目标的高密度三维点云, 能够准确表达地物间的几何拓扑关系, 为快速、准确获取建筑物信息提供了条件。目前, 主流机载LiDAR所采集的点云空间分辨率还较低, 仅依靠点云往往无法获取精确的建筑物轮廓信息。因此, 一方面需要通过提高点云的采集密度来提高建筑物的定位和轮廓提取精度; 另一方面还需要结合其他传感器数据, 以弥补机载LiDAR数据在建筑物轮廓信息提取方面的不足。
随着硬件的发展, 目前主流的机载LiDAR系统均配载了高分辨率的数码相机, 并与激光扫描仪受同一POS系统控制[6, 7], 其获取的高分辨率航空影像理论上可以直接进行定位。同时, 随着机载LiDAR点云与影像配准算法的发展[8, 9, 10, 11], 同机获取的点云与影像数据可以快速、高精度地进行配准, 是辅助点云进行城市地区建筑物轮廓提取的理想数据源。本文以提取后的建筑物机载LiDAR数据为基础, 结合配准后的同区域航空影像, 提出了一种建筑物轮廓信息的提取方法。
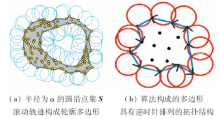
对于投影到二维平面上的散乱点云, 有多种方法可以获得其轮廓[12, 13, 14]。对现有文献进行分析可知, 二维α -shapes算法是一种高效、鲁棒的散乱点云轮廓提取算法[15]。一个有限点集S的α -shape是一个由点集S和参数α 唯一确定的多边形。参数α 控制了多边形生成的精细程度。其原理(图1)可以比喻为: 一个半径为α 的圆在点集S外滚动, 当α 足够大时, 圆不会滚动到点集内部, 其滚动的痕迹就是点集的边界线(图1(a))。
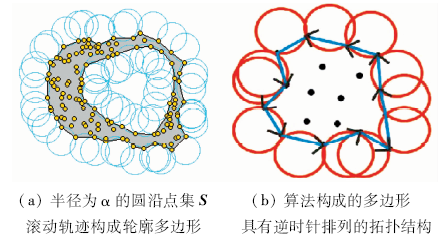 | 图1 α -shapes算法原理示意图Fig.1 Principle of α -shapes algorithm |
参数α 决定了点集S轮廓多边形的精细程度, 并且可以处理凹多边形的边界。文献[16]将α -shapes 算法应用于LiDAR数据处理, 证明了该算法简洁高效、运行稳定和提取精度高的优势, 适用于任何形状的建筑物轮廓线; 文献[17]也提出了相似算法, 利用边长比作为约束条件对构造TIN后的离散点的准确边界进行追踪, 同样适宜于各种形状的点云轮廓。
传统的用于恢复完整建筑物轮廓信息的线特征提取方法存在着需要构建特征线之间拓扑关系的问题, 比如文献[18]采用空间二分的方法, 利用从IKONOS影像中提取的建筑物边缘作为分割线, 对二维空间先细分再合并, 最终得到建筑物的外轮廓。这个过程不仅复杂, 而且容易产生空间上的碎片。而利用α -shapes算法提取轮廓的优势在于α -shapes算法事先构建了Delaunay三角网, 因此每1个三角形的3条边实际上是3个逆时针排列、首尾相连的矢量。因此, 当获取到所有的α -shapes边之后, 将这些边构成的矢量首尾相连, 即可得到一个按逆时针排列的顶点序列, 从而得到完整的建筑物轮廓多边形(图1(b))。
从点云中提取的建筑物轮廓虽然具有完整的多边形拓扑关系, 但是由于点云在建筑物边缘处的信息缺失, 提取的轮廓较为粗糙, 具体表现为构成轮廓的边缘呈锯齿状、细节缺失严重, 因此需要借助影像来完成更精确的建筑物轮廓信息提取工作。
从影像中提取建筑物轮廓线本质上属于边缘提取问题, 细化到具体目标就是从影像中提取完整的直线段。直线段检测是计算机视觉领域的经典研究问题, 传统的思路为首先使用Canny边缘检测算子检测边缘[17], 然后利用Hough变换在参数空间内提取所有的直线点, 接着利用长度阈值将这些线分割成线段。这类算法不考虑边缘点的方向, 获取的结果较为杂乱, 在含有高密度边缘信息的区域容易导致错误检测, 不利于高分辨率影像中的线特征提取。为此, 文献[20]提出了一种忽视线段倾角大小, 只注重其倾角方向的思路; 文献[21]在此基础上进行了实验和改进, 利用基于心理学上的感知原则有效控制了错误检测的数量, 证明这种方法的结果定位准确, 具有鲁棒性。
本文实验证明这种方法对于高分辨率航空影像中的建筑物边缘线段提取具有很高的鲁棒的。将提取结果矢量化后与原影像叠加比较发现, 该方法提取的建筑物边缘线段准确、完整, 基本覆盖了所有的建筑物内外边缘像素, 漏检现象很少; 同时, 在有植被覆盖的区域也并没有产生较大的错检现象。
从影像上获取的线段具有准确的二维平面坐标, 但是没有形成拓扑关系完整的建筑物轮廓多边形。这一点恰好与从LiDAR点云中提取的粗糙轮廓优势互补, 因此可以结合二者的优势, 得到精确的建筑物外轮廓。建筑物轮廓由粗糙到精确的过程通常称为建筑物轮廓的“ 规则化(regularization)” 或“ 精化(refinement)” [22, 23]。为了达到精化的目的, 首先需要准确地找到位于建筑物边界上的线段。文献[24]首先估计出建筑物的主方向, 然后将其作为约束在影像中搜索与之平行或垂直的线段, 最后通过分析线段两侧的点云密度得到真正的建筑物轮廓线。由于前文已经获得了建筑物的粗糙边缘, 可以在很大程度上表达建筑物的准确轮廓位置, 而无需在整个场景范围内进行全局搜索。
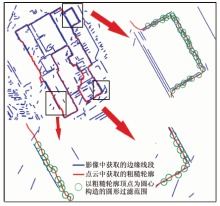
令提取的粗糙轮廓多边形为P{p1, p2, …, pn}, 其中{p1, p2, …, pn}为P包含的顶点; 令提取的建筑线段为L{l1, l2, …, ln}。以任意pi∈ P为圆心, 以一个距离阈值Tdis为半径构造n个圆, 记为{R1, R2, …, Rn}, 然后对任意lj∈ {l1, l2, …, ln}判断是否与{R1, R2, …, Rn}中的圆相交, 并记录相交的圆个数Nj。当Nj大于一定的阈值时(一般取3), 可以认为lj是潜在的建筑物边缘线段— — 这个过程实际上可以描述为潜在的建筑物边缘线段被原有的粗糙轮廓“ 吸附” , 而半径Tdis则控制了这种吸附能力的大小(图2)。
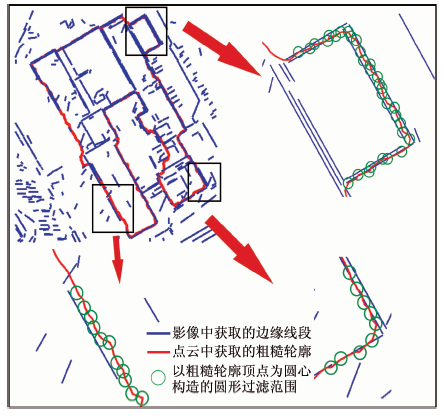 | 图2 利用粗糙建筑物轮廓筛选建筑物边缘线段Fig.2 Filtering building edge line segments using coarse building contour |
实验证明, 通过正确设定Tdis值(本文取0.2 m), 可以有效地滤除不属于建筑物边缘上的线段。
正确提取了建筑物边缘线特征之后, 即可利用这些线段对原始的粗糙边缘进行精化。假设经过滤除之后的建筑物边缘特征为{
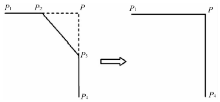
经过化简后得到的轮廓多边形与真实的建筑物轮廓基本重合, 但是由于位于转角处的顶点会分别“ 吸附” 在不同的线段上, 因此往往会造成转角处的缺失。同时, 当DP算法的阈值设置过大时, 也容易造成转角的缺失[22]。本文采用文献[22]中所提出的建筑物轮廓规则化方法进行处理。文献[22]提出了4个步骤用于建筑物轮廓的精化, 分别为分裂、强制相交、合并及移除。其中“ 强制相交” 操作适宜于处理上文提到的情况, 其原理如图3所示。
 | 图3 强制相交操作恢复转角的原理Fig.3 Principle of corner recovery by intersection operation |
如图3所示, 假设位于建筑物转角处的3条边分别为P1P2, P2P3, P3P4, 其中P1P2和P3P4是真实的建筑物边缘, 真实的建筑物转角点位于图中点P。计算△ P2PP3 和△ P1PP4的面积及其比率R, 如果R小于某个阈值TR, 那么计算直线P1P2和P3P4的交点作为真实的转角点P的位置。经过DP算法的简化合并, P1P2和P3P4往往均拥有大的长度, 所以阈值TR可以取较小的值, 从而避免将并非转角的位置也处理掉, 本文中一般取TR=0.2。
通过上述一系列处理之后即可以得到最终精化之后的精确建筑物轮廓多边形。
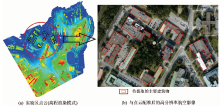
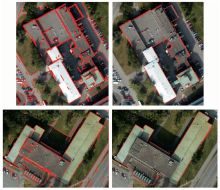
为了证实本文方法的有效性, 选择同机获取的机载LiDAR点云及与其配准后的航空影像作为实验数据, 对本文提出的方法进行验证(图4)。
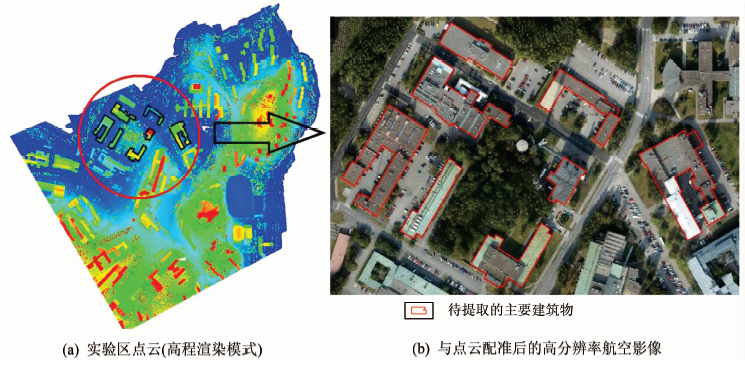 | 图4 实验区域点云与影像图Fig.4 Point clouds and image of study area |
实验所采用的影像空间分辨率为0.05 m, 具有非常高的细节分辨能力。采用本文方法对原始点云和影像数据进行处理, 部分建筑物边缘线段的提取和过滤结果如图5所示。轮廓线的精化过程如图6所示。
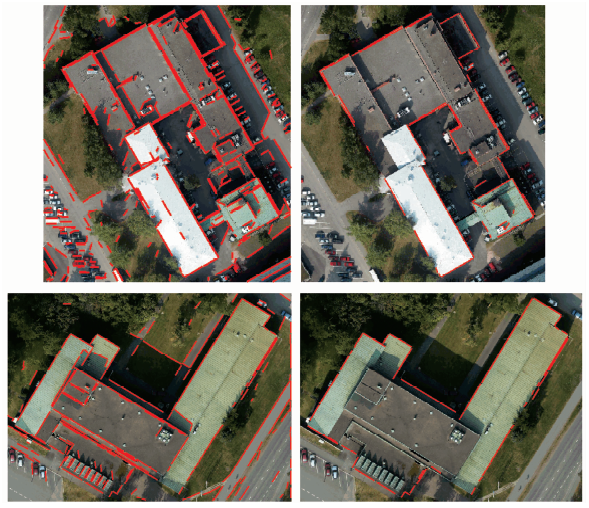 | 图5 建筑物边缘线特征及其过滤结果(左: 从原始影像中提取的边缘线段; 右: 过滤后的准确建筑物边缘)Fig.5 Building edge line segments and its filtering results |
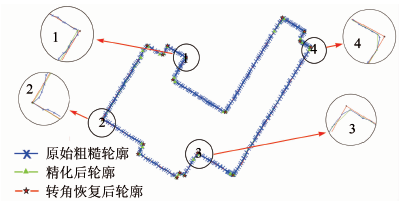 | 图6 原始粗糙轮廓、精化后轮廓和最终轮廓叠加显示(标号1-4分别展示了4个建筑物转角处的恢复过程)Fig.6 Overlay display of original coarse contour, preliminary contour and final refined contour |
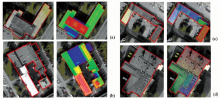
图7(a)— (d)列出了实验区域内主要建筑物轮廓提取结果, 其中左列为建筑物轮廓与影像的叠加效果; 右列为建筑物轮廓、点云和影像三者的叠加效果。可以看出, 应用本文方法提取出的建筑物轮廓与影像中真实建筑物及前期提取出的建筑物点云套合效果很好, 基本完整重现了建筑物的边缘细节, 说明提取出轮廓的空间精确性; 同时, 提取的建筑物轮廓不同于影像中提取的离散的直线段, 而是具有完整的拓扑关系的闭合多边形, 可以直接作为地物的矢量要素表达。
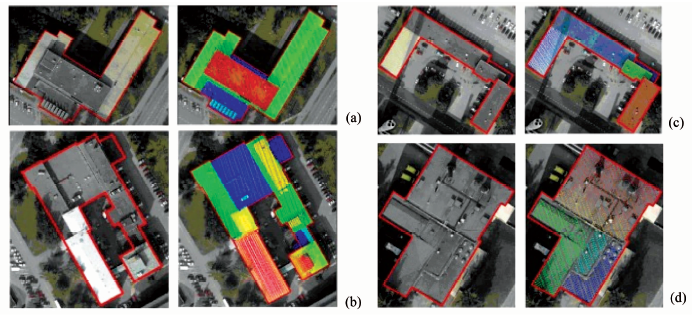 | 图7 实验区域主要建筑物轮廓、影像和点云叠加效果(左列为建筑物轮廓与影像的叠加; 右列为建筑物轮廓、点云和影像的叠加)Fig.7 Overlap display of building contours, images and point clouds |
本文方法同样存在一定的问题, 如图5所示, 某些建筑物边缘细节受到高植被的干扰, 没有形成较明显的线段特征, 因此在对粗糙轮廓进行修正处理时, 没有可以依据的边缘线段, 最终, 这些轮廓细节被DP算法化简消失, 损失了一定的信息。另外, 由于本文提出的流程涉及到多个独立算法的集成, 其中具有很多先验性质的参数设定, 研究如何提高各种参数的自适应确定能力, 也是提高自动化程度的一个重要因素。
1)采用“ 点云轮廓提取-影像直线特征提取-建筑物轮廓精化” 的策略, 能够结合机载LiDAR数据与航空影像的数据特点, 充分利用二者的优势;
2)提出了一种新的建筑物轮廓精化方法, 以影像中的真实建筑物直线特征为条件修正粗糙建筑轮廓, 无需先验的假设条件, 因此适用性更为广泛。
3)本文方法尚存在着不足, 如多种阈值的设定, 其自适应程度不高, 需要今后进一步研究解决。
The authors have declared that no competing interests exist.
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
|
| [17] |
|
| [18] |
|
| [19] |
|
| [20] |
|
| [21] |
|
| [22] |
|
| [23] |
|
| [24] |
|
| [25] |
|