

{kind=link}
{kind=link}
{kind=link}
{kind=link}
基于DNB验证的VIIRS夜间云检测方法
[夏浪1  , 毛克彪
, 毛克彪1 , 孙知文2 , 马莹3 , 赵芬1 ]
, 毛克彪, 孙知文|
|


第一作者简介: 夏 浪(1989-),男,硕士研究生,主要从事环境遥感方面的研究,Email:xialang2012@163.com。
针对夜间云检测验证中低云和雾难以区分的困难,提出了对于南方山区有效的云检测和验证方案。通过分析可见光红外成像辐射仪套件(visible infrared imager radiometer suite,VIIRS)传感器数据的新特性和云检测的原理,给出了适合VIIRS夜间云检测的方法。对白天/夜间波段(day and night band,DNB)数据对云检测验证的适用性进行了分析。结果表明: 在月亮天顶角小于60°时,DNB波段能够较好地用于夜间云检测验证; 在扫描角小于15°时,云检测精度不低于91%; 使用VIIRS的M12和M13通道的亮温差值 BTM12- BTM13辅助M12和M15通道的亮温差值 BTM12- BTM15进行低云检测,能够去除大部分山谷中雾的影响; 检测阈值对扫描角大小变化敏感,当扫描角较大时,设定的阈值在检测精度上不如扫描角较小时理想。
Validating the cloud detection result at night and distinguishing low cloud from fog through satellite data are difficult in southern mountain areas of China. In this paper, a method is presented by analyzing the new features of the visible infrared imaging radiometer suite (VIIRS) sensor data and the theory of the cloud detection. The viability of VIIRS day and night (DNB) data in night cloud detection is discussed in detail and the result shows that the DNB data can be used to validate the result when lunar zenith angle is less than 60°. The application and validation show that the method is effective, and the estimation accuracy is higher than 91% when scan angle is less than 15°, and the BTM12- BTM13 and BTM12- BTM15 can be used to effectively distinguish low clouds and fog. In addition, the detection thresholds are sensitive to the sensor zenith angle, and the detection accuracy is higher when the sensor zenith angle is small.
地球的辐射收支和气候响应依赖于云的反馈辐射和几何形态, 云能够有效地反射太阳入射辐射和吸收地球的长波辐射[1]。这种反馈辐射效应使得云在宏观尺度上对地球能量辐射平衡、气候变化有重要影响; 另一方面, 在微观尺度上, 夜间云对于区域农业冻害、降水、干旱均有较大影响, 因此及时准确地获取夜间云的相关参数是十分必要的。
已有研究者对云监测做过许多研究[2, 3, 4, 5, 6, 7, 8, 9, 10], 提出了一些有代表性的云检测方法, 这些算法主要是利用可见光、近红外和热红外数据进行综合判断。由于白天卫星可获取可见光、近红外与红外通道数据, 检测可使用的通道多、信息丰富, 使得检测精度较高, 并且可以直接通过目视观察进行检测结果的初步验证; 由于晚上卫星很难获得近红外和可见光信息、可用波段少、下垫面比辐射率变化及检测结果验证难, 这使得夜间云检测相对白天具有一定的难度, 方法相对较少且精度较低。尽管研究者们对MODIS夜间云检测进行了一些研究[11, 12, 13, 14], 提高了相应区域的检测精度, 但总体上夜间检测精度比白天的低, 还有待提高。
2011年10月28日发射升空的美国新一代极轨运行环境卫星系统预备卫星Suomi NPP搭载了包括可见光红外成像辐射仪套件(visible infrared imager radiometer suite, VIIRS)在内的5个对地观测仪器。VIIRS将用来替代工作年限已超期的MODIS, 其数据分辨率较MODIS有一定提升, 数据信噪比和沿水平方向的采样间隔也有较大提高。另外由于观测刈幅由MODIS的2 030 km增加到3 000 km, 在1 d的观测范围内VIIRS在赤道附近不存在类似于MODIS的不连续空白间隙。但VIIRS波段数不如MODIS丰富, 特别是VIIRS没有可用于晴空测试的6.7 μ m通道、缺少位于水汽吸收区的7.3 μ m水汽通道、没有可用于检测高云的13.9 μ m通道(CO2薄片法)。这一系列的缺失对于获得精确的夜间云掩码提出了更大的挑战。因此本研究针对VIIRS传感器的特点进行了相应的研究, 提出了基于白天/夜间波段(day and night band, DNB)图像验证的夜间云检测方法。
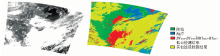
VIIRS传感器共22个波段: 370 m空间分辨率的5个I波段, 750 m空间分辨率的1个DNB和16个M波段。扫描角± 56° , 每1 d可获得全球2次观测数据。VIIRS除了继承MODIS和AVHRR等传感器的波段特性、提升了数据信噪比和空间分辨率外, 其最突出的特点是对随扫描角增加而增加的空间分辨率进行了有效控制, 而这也是VIIRS对极轨环境卫星数据质量的最大改进[15]。表1列出了VIIRS, MODIS, AVHRR及OLS的星下点和边缘分辨率(分别为沿扫描方向和沿轨道方向)。VIIRS扫描边缘分辨率(以下简称边缘分辨率)的增长最大仅2倍, 远小于MODIS, AVHRR的最大6倍, OLS的2.5倍(OLS有精细和平滑2种扫描模式, 精细模式对应的采样间隔是0.56 km× 0.56 km, 但其实际的空间分辨率在2.2~5.4 km内变化[15])。
| 表1 VIIRS传感器参数以及与MODIS, AVHRR, OLS的比较 Tab.1 Parameters of VIIRS and comparison of VIIRS, MODIS, AVHRR and OLS |
由于VIIRS传感器采用了合并采样点的方式来控制边缘分辨率的增长, 使得DNB在任何扫描角的沿轨道和沿扫描方向的分辨率都保持不变。图1为VIRS传感器亚像元合并图。
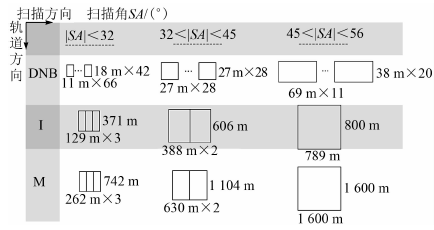 | 图1 VIIRS传感器亚像元合并Fig.1 De-aggregation of sub-pixels of the VIIRS |
如图1所示, 对于DNB波段, 单个CCD在地表的分辨率约为11 m× 18 m, 当扫描角|SA| < 32° 时, 在扫描方向和轨道方向(图1中未绘出轨道方向的合并像元)分别通过合并66和42个CCD像元来获得740 m× 740 m分辨率的像元(对应图1中的11 m× 66和18 m× 42, 以下均相同)。随着扫描角的增大, 单个CCD代表的地面分辨率降低, 为保持分辨率不变则需要减少CCD的合并数量。因此, NASA将合并算法设计为: 当32° < |SA|< 45° , 45° < |SA|< 56° 时, 沿扫描和沿轨道方向分别合并27像元× 28像元, 11像元× 20像元来保持分辨率的恒定, M波段和I波段只在沿扫描方向进行了像元合并, 根据不同扫描角分别合并3, 2, 1个像元。
基于DNB检测法由高、中、低敏感区域3部分组成, 在光照充足的条件下, 该方法使用低敏感区域获取数据, 该区域没有使用时间延迟累积(time delay and integration, TDI)模式来提高信噪比。中等敏感区域使用3个亚像元工作在TDI模式下来提高信噪比, 高敏感区域使用250个亚像元工作在TDI模式下来提高信噪比。电子模块(electronics module, EM)根据不同光照来选择不同的敏感区域来获取数据, 当高敏感区域即将饱和时, 立刻切换到中敏感区域, 而在默认的情况下则使用高敏感区域来获取数据。此外, 需要合并的亚像元数量是根据外界辐射强度来进行选择的。例如, 在最低光照条件下(无月光的夜间), 高敏感区域的250个亚像元将被同时合并来提升信噪比, 在夜间有月光条件下, 可能将只合并250个亚像元中的部分。
在进行适当简化后, 夜间大气辐射传输可以表达为
Lλ (θ )=τ λ (θ )ε λ (θ )Bλ (T)+
式中: Lλ (θ )为传感器接收到的辐亮度; τ λ (θ )和ε λ (θ )分别为波长为λ 的大气透过率和地物发射率; Bλ (T)为波长为λ 的地物的辐亮度; T为地物亮温;
Lλ (θ )=τ λ (θ )ε λ (θ )Bλ (T) 。 (2)
云能改变地表的辐射传输路径, 具体表现在云对来自不同波段λ 的地表辐射有不同的吸收和反射(散射)作用。在相同的地表类型下, 有云时大气的透过率τ λ (θ )和无云时是不同的, 根据这一特性可以使用式(2)粗略地计算不同波段传感器接收到的Lλ (θ )的差值, 从而用来区分云和地表。
1.2.1 卷云和高云的检测
在晴空条件下, 12 μ m波长处水汽的吸收要强于11 μ m处[1], 因此二者的差值可以用来识别云。由于红外发射率的方向性存在, 用于薄卷云检测的11 μ m波长处的传感器亮温BT11和12 μ m处传感器亮温BT12的差值BT11-BT12的阈值随BT11和传感器观测的天顶角的变化而变化[6], 但对于薄卷云, 一般情况下有BT11-BT12> 0。
水和冰在12 μ m波长处的吸收远强于3.9 μ m处。当有高云存在时, 传感器接收到的12 μ m波长处辐射由于高云的吸收而衰减, 此时3.9 μ m波长处的传感器亮温BT3.9和BT12的差值BT3.9-BT12> 0, 因此利用此原理, 可以使用BT3.9-BT12差值来判识高云。在晴空条件下, 一般BT3.9-BT12< 2; 而云高存在时, 一般BT3.9-BT12> 4, 且该差值随高云的光学厚度的增加而增加, 因此通过设定合理的阈值可以对高云进行较好地判识。
1.2.2 低云和雾的区分
夜间低厚云发射率低, 因此在有低厚云的图像上, 3.7 μ m波长处的传感器亮温BT3.7和BT11的差值BT3.7-BT11会出现负值; 另一方面, 低植被覆盖的干旱区地表发射率和低云的发射率较相似, 这样会将地表识别为云, 出现误判。对于此, VIIRS全球业务云掩码产品[16]在夜间仅对NDVI> 0.25的区域进行BT3.7-BT12检测。在我国南方等多山地区, 植被覆盖较好, 水汽含量高, 夜间山谷容易形成雾。雾在3.7 μ m的发射率随雾的厚度变化而变化, 但总体上发射率与低云相当, 根据式(2)计算BT3.7-BT12时也会出现负值, 影响检测结果。
VIIRS M13波段(4.05 μ m)和M12波段(3.75 μ m)发射率较为相似, 对于同一地物, BT3.7和4.0 μ m波长处传感器亮温BT4.0的差值BT3.7-BT4.0的大小主要由透过率决定, 水汽并不是影响3.7 μ m波长处透过率的主要因素, 故只有当云层达到一定厚度时, 传感器接收到的辐射能才全为云层发射辐射, 此时BT3.7-BT4.0差值较小, 一般< 1, 因此BT3.7-BT4.0可用于判断低厚云。
城市下垫面等植被覆盖度较低的区域的发射率较低, BT3.7-BT4.0差值和厚云较为相似, 会造成误判, 但BT3.7-BT11几乎不受该类型下垫面的影响。雾的红外发射特性和低云相似, 但在实际当中, BT3.7-BT4.0与低厚云有较大差异, 对于低厚云, 一般BT3.7-BT4.0< 2, 对于山谷区域的雾, BT3.7-BT4.0> 2, 因此结合BT3.7-BT11和BT3.7-BT4.0对植被覆盖较好的区域(纬度< 30° )进行低厚云检测能取得较好的效果。
1.2.3 DNB 云检测
DNB通常可用于检测来自地球表面的自发光物体, 如人造灯光、森林火灾及闪电等。当地球表面反射的月光强度大到能够被传感器感测到时, 非自发光的地物和云层也能被检测到, 此时DNB则可以被用来进行云检测。图2为利用DNB观测获得的新月、上弦月、满月、下弦月和残月共5种不同月相时的图像。
 | 图2 不同月相时DNB观测图像Fig.2 DNB images under different phase of the moon |
由图2可知, 在新月和残月时, 月亮照度较低, 此时图像中云与地物背景差别不大, 对于有地面灯光的区域, 不同厚度的云使得该区域模糊化的程度不同, 整体图像中噪点较多, 另外当传感器扫描角|SA|> 50° 时图像基本全为噪点所覆盖; 在上弦月和下弦月时, 月亮照度增强, 此时还是不能较好地区分云和背景地物; 当在满月条件下, 云和背景地物都能较好地区分, 但是此时还不易识别薄卷云, 这是因为其厚度低、反射也弱, 在图像上和背景地物的反差较小。
因此, 当月亮天顶角θ m< 60° (约农历每月13— 19日)时, DNB夜间图像去除地面灯光影响后可用于检测较厚的云, 同时也可用于云检测的精度鉴定。DNB在1个月中可用于云检测的天数仅有7 d左右, 没有很好的可持续性和稳定性, 因此在实际云检测中并未使用DNB, 而是用于验证检测结果的精度和辅助阈值的选择。
选择的测试数据(图3)成像于2013-03-28T17:50, 介于E100.68° ~138.19° , N18.42° ~42.69° 之间, 包含中国中东部大部分陆域和部分海洋。图3(左)为该同时获取的DNB夜间图像, 包含灯光、云及地物等信息。在该图像的辅助下, 陆地云检测的阈值如表2所示; 海洋阈值为1< BTM15-BTM13, -6< BTM12-BTM15< -2, 其中BTM12, BTM13和BTM15分别为VIIRS传感器M12, M13和M15通道的亮温。检测结果如图3(右)所示。
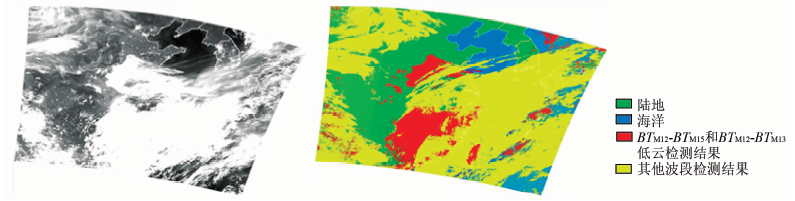 | 图3 测试数据DNB图像(左)和检测结果(右)Fig.3 Original DNB image(left) and test result(right) |
| 表2 陆地云检测算法阈值 Tab.2 Thresholds of the land cloud detection |
由图3可知: 陆地检测精度较高(有些比较薄的云层因DNB图像缩小后基本不可见), 海洋和陆地区域的漏检一般发生在边缘区域, 如海洋区域的朝鲜半岛以东出现部分漏检, 陆地区域右上角也有部分漏检。漏检大多出现在边缘区域的原因可能为阈值随观测天顶角变化而发生了变化, 因此部分阈值还需要进行细调。
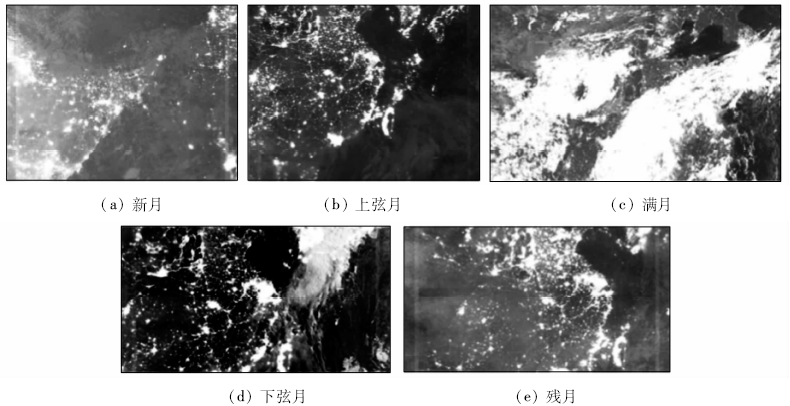
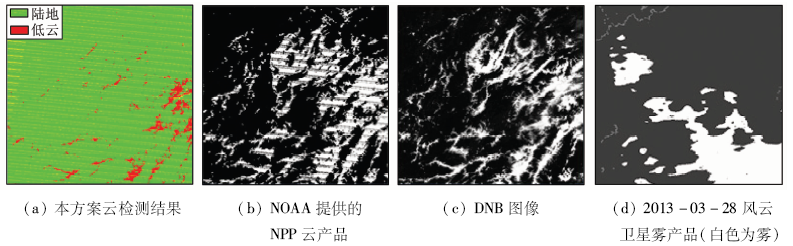 | 图4 低云检测结果与NPP全球业务产品云掩模对比Fig.4 Comparison of the low cloud detection and cloud mask of NPP global business products |
风云卫星雾产品(空间分辨率为1 km)的观测时间(图4(d))和NPP卫星DNB(图4(c))成像间隔约10 min, 表明该区域有雾发生。DNB图像中雾和云在纹理和色调上有较大不同, 云比雾亮度更大, 山谷中的雾有明显的条纹状, 图4(c)中大量的白色山脉状纹理较明显的区域为雾或者是低云与雾的混合。通过对比图像可知, 在NOAA提供的云产品中没有区分出低云和雾, 雾覆盖的区域被识别为云, 而本方案通过使用BTM12-BTM13进行了相应优化, 去除了山谷中大部分雾对检测造成的干扰; 但是, 如果云层过薄, BTM12-BTM13会造成部分漏检。
根据对VIIRS数据新特性的分析, DNB在扫描方向和沿轨道方向分辨率保持不变, 而M波段数据在扫描角SA=32° 时分辨率已经大于750 m。另一方面, 由于M波段数据的蝴蝶结(bow tie)效应的存在, 在扫描角较大时每2次扫描之间存在将近一半的重复像元, 因此如果单纯将2幅图像检测结果的像元数进行统计将产生很大误差, 如果选择较小扫描角内的数据, 分辨率虽然得到控制, 但是有效像元数减少, 包含地类少, 精度检验结果不具有代表性。综合考虑有效像元数和分辨率, 本文选择-15° < SA< 15° 范围内的像元数进行精度评价。由于VIIRS L1数据中并未包含扫描角数据, 因此通过
θ =sin-1
来计算扫描角。式中: θ 为扫描角; θ zen为卫星传感器天顶角; Rearth为地球半径; Hsat为卫星高度。去除灯光和高反射地物后的有效云DNB图像像元数为1 230 646, 云检测像元数为1 130 122, 在-15° < SA< 15° 范围内本检测方案的扫描精度约为91.83%, 当然随着扫描角的增长, 检测精度略有所下降, 但相对而言其精度还是较高的。
通过对真实数据的应用分析, 结合DNB夜间图像对检测结果进行了验证, 分析表明:
1)本文提出的夜间云监测方案在扫描角较小时检测精度不低于91%, 但检测精度随扫描角变大而略有降低。
2)DNB夜间图像可用于夜间云检测以及对云检测算法精度的验证。
3)对于夜间南方山区的雾, 通过使用BTM12-BTM13辅助BTM12-BTM15检测低云可以降低云检测算法对雾的误判, 提高检测精度。
4)本文提出的检测方案在扫描角较大情况下的检测精度不如扫描角较小时理想, 因此在后续研究中, 如何确定扫描角较大情况下的阈值是重要的研究方向。
The authors have declared that no competing interests exist.
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
|