
{kind=link}
{kind=link}
{kind=link}
基于改进NAS-RIF算法的遥感噪声图像自适复原
[张凡 ]
]
]
|
|


作者简介: 张 凡(1981-),男,硕士,讲师,主要从事计算机算法、软件开发与系统实现和计算机图像处理等方面的研究。Email: zhangteachervip@163.com。
实现对遥感噪声图像的有效复原是遥感图像处理的一项重要研究内容。在对非负支撑域有限递归逆滤波(non-negativity and support constraints recursive inverse filtering,NAS-RIF)算法深入研究的基础上,提出一种基于改进自适应NAS-RIF算法的遥感噪声图像复原方法。该算法针对经典NAS-RIF算法存在的缺陷,首先对含有椒盐噪声和高斯白噪声的遥感图像采用自适应伪中值滤波算法进行预处理,以尽可能排除图像中噪声的干扰; 然后结合图像的灰度值,从算法支撑域和背景灰度值2个方面加以改进; 最后对代价函数引入基于目标信息的修正项,改进了经典NAS-RIF算法的代价函数; 与对数函数复合,使得改进后NAS-RIF算法的代价函数具有良好的收敛性; 并采用共轭梯度法对改进自适应NAS-RIF算法进行整体优化。对仿真实验结果进行的主观和客观分析表明,本文算法的性能优于经典NAS-RIF算法、已有的改进NAS-RIF算法以及小波阈值去噪方法,能够胜任遥感噪声图像的复原处理。
Image restoration is an important research content in remote sensing noise image processing. In order to deal with the remote sensing image effectively, this paper proposes a new improved self-adaptive NAS-RIF algorithm based on the research on the basic principle of the non-negativity and support constraints recursive inverse filtering (NAS-RIF). With the purpose of tackling the defects of the original NAS-RIF algorithm,the author first filtered the image with pepper and salt noise as well as white Gaussian noise by the self-adaptive pseudo-median filtering algorithm so as to eliminate the noise in the image as much as possible, then improved the original NAS-RIF algorithm effectively from two aspects of support domain and background gray value,in combinatiuon with the gray values of the image and finally introduced the correction term based on the target information to the cost function so as to improve the classic cost function of the original NAS-RIF algorithm. Aimed at improving the convergence of the cost function of the improved NAS-RIF algorithm,the author combined the logarithmic function and adopted the conjugate gradient method to optimize the improved NAS-RIF algorithm. Subjective and objective analysis of the simulation experimental results shows that the performance of the improved NAS-RIF algorithm proposed in this paper is better than that of the original NAS-RIF algorithm and some available improved NAS-RIF algorithms as well as the wavelet threshold denoising method,suggesting that this means is suitable for the restoration process of the remote sensing noise image.
在大多数情况下, 遥感图像由于受到成像环境的影响以及在图像传输、存储和解码等环节中不可避免地受到大量噪声的干扰, 因而给图像的解译、目标分割、特征提取和图像融合等图像处理工作带来较大困难[1]。因此, 探求一种较为实用的方法实现对遥感图像中大量噪声的有效滤除, 已成为一项非常有意义的研究工作。近年来, 众多学者开展了遥感图像去噪研究, 孙蕾等[2]针对高光谱遥感图像, 提出一种基于光谱特性的小波去噪算法; 王相海等[3]将非扩散模型与小波变换进行有机结合, 实现对遥感图像噪声的滤除; 余岸竹等[4]将压缩感知(compressive sensing, CS)算法融入到小波变换中, 在有效保持图像纹理和边缘等细节信息的同时, 有效地抑制了遥感图像中的噪声; 王相海等[5]将P-M模型(一种排队模型, 利用扩散偏微分方程进行图像平滑)与ROF模型(Rudin, Oshe和Fatemi共同开发的图像恢复模型, 在处理纹理丰富的图像时易丢失重要信息)相结合, 应用于去除遥感图像中的噪声。对现有研究成果的分析表明, 目前对遥感图像的去噪研究主要集中在频率域的方法(如小波变换等)。以小波变换为例, 虽然该类方法能够对遥感图像进行多分辨率分解, 对图像中的各类细节信息能够进行有效刻画; 但是随着分解层数的增加, 图像的大量冗余信息也会急剧增多, 并且相当一部分信息对最终的小波重构图像贡献不大。
遥感噪声图像作为一种降质量图像, 在对其噪声滤除的同时还要兼顾图像的清晰度, 即实现对图像的高质量复原, 而非单纯意义上的噪声滤波。非负支撑域有限递归逆滤波(non-negativity and support constraints recursive inverse filtering, NAS-RIF)算法作为一种新型图像复原算法于20世纪90年代被提出, 由于该算法迭代次数较少, 具有相对简单的算法结构, 因而被应用于降质图像的高质量复原处理[6, 7, 8, 9]。因此, 本文尝试对NAS-RIF进行适当改进, 提出一种改进自适应NAS-RIF复原算法对遥感噪声图像进行处理。具体的改进策略为: ①对降质图像引入自适应伪中值滤波(self-adaptive pseudo-median filtering)进行预处理, 尽可能排除噪声因素的干扰; ②对支撑域和图像背景灰度值的确定方法进行改进; ③对代价函数(cost function)引入一种基于目标信息的修正项, 对经典代价函数进行改进; 并对代价函数进行优化, 使得优化后的改进代价函数的收敛性更加稳定。
1景遥感噪声图像可抽象地表示为
G(x, y)=F(x, y)* H(x, y)+N(x, y) , (1)
式中: G(x, y)为降质图像; F(x, y)为原始图像; H(x, y)为点扩散函数; N(x, y)为噪声因素, 为研究方便, 可将其抽象成某一类噪声类型; “ * ” 为卷积运算符。采用NAS-RIF算法对该类图像进行复原, 具体步骤为:
1)将遥感噪声图像G(x, y)输入到可变系数的滤波器u(x, y)中, 通过对其做卷积运算, 获得滤波后图像
2)对
3)对
4)经过多次迭代运算, 使得
该算法的复原结果
式中: Dsup为支撑域像素点的集合;
在图像复原过程中, 代价函数[9]可定义为
J [u(x, y)]=
顾及式(2), 则式(3)可进一步表示为
J [u(x, y)]=
式(3)— (4)中的最右项为修正项, 当图像出现全黑背景时, 代价函数收敛于0, 采用该修正项能够对此情况下的代价函数收敛性进行适当修正。可见, 当
经典NAS-RIF算法的原理简单, 经过少量的迭代即可获得最佳的复原结果, 但其存在如下缺陷: ①在多次迭代过程中, 图像中的噪声会在无意之中被放大, 从而导致复原后图像中的噪声得不到有效抑制; ②该算法的支撑域设置为矩形, 与实际情况不符合, 会使复原结果大打折扣; ③该算法需要经过多次迭代才能获得较优的结果, 计算较为复杂。故本文尝试从以上3个方面进行改进。
1.2.1 自适应伪中值滤波
自适应伪中值滤波算法[10, 11]在中值滤波算法基础上发展而来, 本文对经典中值滤波过程进行了如下改进:
1)滤波窗口拆分。将滤波窗口进行拆分, 对于大小为m× n的窗口而言, 将其拆分成m个(1× m)的子窗口, 对每个子窗口中的像素进行经典中值滤波, 即
式中: Med为经典中值滤波函数;
2)灰度值排序。对上述中值滤波获得的中值进行灰度值排序, 即
f(x, y)=median[
式中: median为取中间值运算; f(x, y)为最终滤波结果。对于经典的中值滤波而言, 随着滤波模板尺寸的增大, 滤波效果也会越来越好; 但对于伪中值滤波而言, 此特点不太明显, 且随着模板尺寸的增大, 计算时间急剧增加, 而滤波效果基本保持不变。经过多次实验, 本文的滤波模板尺寸设定为5× 5。
1.2.2 支撑域改进
NAS-RIF算法通常设定支撑域为矩形形式, 但实际上在大多数情况下该算法的支撑域为非矩形。对此, 文献[8]将图像中最大灰度值与最小灰度值之和的一半作为初始阈值, 通过设定参数ε 进行反复迭代, 从而获得最佳阈值。该方法将阈值的选取与图像中像素点的灰度值联系起来, 所选取的最终阈值能在较大程度上反映图像的真实信息; 但也存在某些缺点: ①参数ε 的选择基本是靠反复试验获得, 普适性不强; ②最佳阈值是通过多次迭代获得的, 这无助于提高算法的计算效率。
基于以上分析, 本文对NAS-RIF算法中支撑域的确定方法进行改进。对于1景降质图像G(x, y)而言, 定义1个大小为7× 7的窗口在该图像中按照规定方向滑动, 当窗口滑动至图像中任意位置时, 统计该窗口中各像素点的灰度值, 即
Num{G* (x, y)}={f1(x, y), f2(x, y), …, f49(x, y)} , (7)
式中: G* (x, y)为落入滑动窗口的图像部分; fn(x, y)(n=1, 2, …, 49)为该7× 7窗口中某像素点的灰度值。
然后对式(7)中获得的像素灰度值求均值, 即
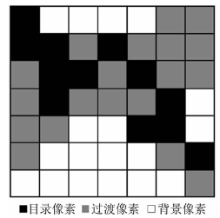
可将该窗口中的像素点看成由目标和背景2类像素构成, 而实际上图像中的这2类像素仅是构成图像像素的一部分, 而另外一部分则是介于两者之间的像素点, 本文称之为“ 过渡像素点” 。因此, 通过设定合理的阈值, 提出了一种基于像素灰度值的新型图像分割方法, 即
G* (x, y)=
式中
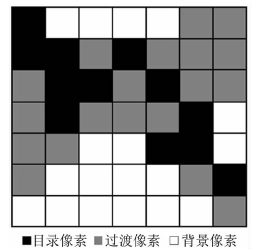 | 图1 图像分割结果(7× 7窗口)Fig.1 Result of image segmentation in 7× 7 window |
从图1可以看出, 滑动窗口中的图像经过式(9)的分割方法处理后, 图像中真正的背景像素为该图中的白色区域; 而传统上认为目标区域的部分, 本文将其分裂为2个部分(灰色区域和黑色区域), 从而进一步提取出真正的图像目标(黑色区域)。通过将7× 7的窗口在图像上继续滑动, 重复以上步骤, 即可获得图像中被标记为黑色区域的部分, 该区域即为本文所说的NAS-RIF算法的支撑域。
NAS-RIF算法对于图像背景灰度值一致时, 能取得不错的效果, 但图像背景灰度一致的情况基本不存在。对此, 文献[7]则采取对图像背景灰度取均值的方法获得灰度值一致的背景图像, 取得不错的效果; 但对整景图像背景灰度值求均值, 无法有效代表图像的真实信息。针对这一问题, 本文提出一种分区域确定图像背景灰度值的方法, 即
f* (x, y)=
式中
通过该窗口在图像中的滑动, 获得灰度值的集合{
1.2.3 代价函数改进
式(4)所定义的NAS-RIF算法代价函数共有3项, 前2项分别对支撑域内的负值像素点和支撑域外的非背景值像素点进行修正, 而第3项则是对背景像素值全为0的情形进行修正。但该算法由于没有考虑目标先验信息, 因而导致部分信息特别是边缘信息被平滑。因此, 本文在参考文献[9]研究成果的基础上, 引入了基于目标信息的修正项, 即
式中: ▽x和▽y分别为滤波后图像沿x和y方向的梯度分量; ▽
式(4)是关于滤波器u(x, y)的凸函数, 且具有较好的收敛性[9]; 经上述改进后, 代价函数的单调性基本没有改变。但为了提高改进后代价函数的收敛性, 采用对数函数ln[· ]对其进行复合处理, 得到本文NAS-RIF算法的改进的代价函数, 即
J* [u(x, y)]=ln{
γ [
函数ln[· ]具有良好的单调性, 通过与式(4)进行复合处理, 得出式(13)中的改进代价函数, 以确保该函数收敛于最小值。
经过本文对NAS-RIF算法进行改进, 势必会在一定程度上增加了计算量, 为此有必要对改进后的NAS-RIF算法进行优化。经过对牛顿法、最速下降法以及共轭梯度法[8]的比较研究, 鉴于共轭梯度法具有较快的收敛速度, 因此采用该方法来对式(13)进行优化。
将经典的NAS-RIF算法、文献[7]提出的NAS-RIF改进算法、小波阈值法[2]和本文改进的算法分别在MATLAB平台上编写适当程序进行实现(分别记为算法1、算法2、算法3和算法4)。采用峰值信噪比(peak signal to noise ratio, PSNR)[12]和边缘保持指数(edge preserve index, EPI)[13]作为上述4类算法性能的定量评价指标。对2景遥感图像的实验结果如图2— 3和表1— 2所示。
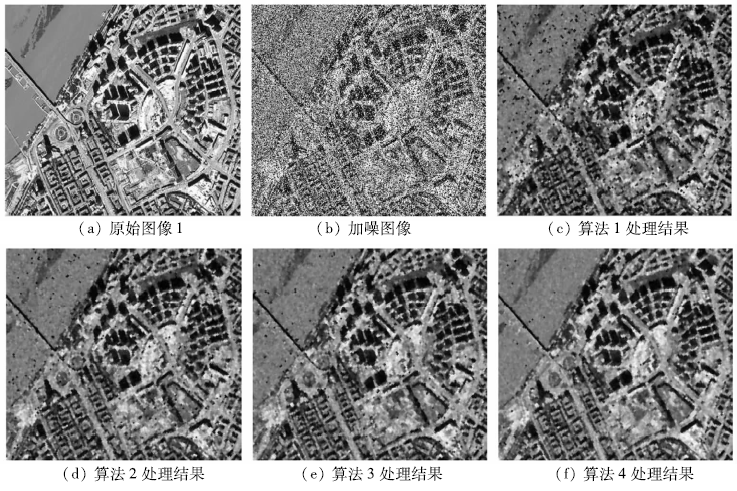 | 图2 用4类算法对遥感图像1处理结果比较Fig.2 Comparison of processing results with four algorithms for remote sensing image 1 |
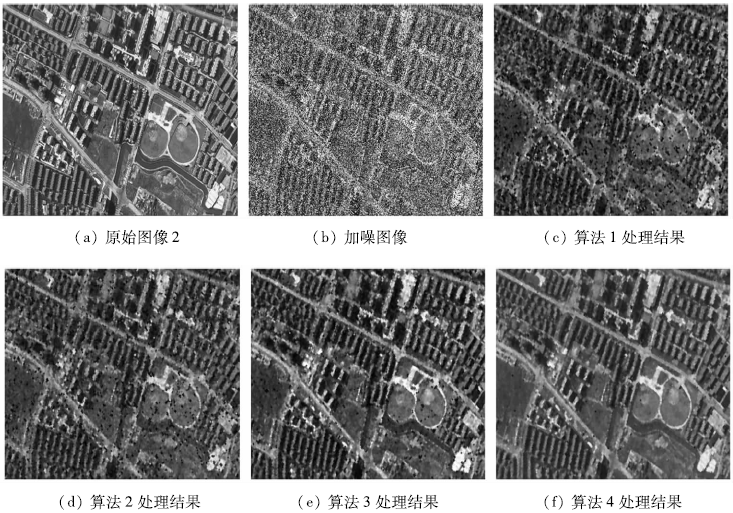 | 图3 用4类算法对遥感图像2处理结果比较Fig.3 Comparison of processing results with four algorithms for remote sensing image 2 |
| 表1 用4类算法对遥感图像1滤波结果的PSNR/EPI值比较 Tab.1 Comparison of PSNR/EPI values of filtering results with four algorithms for remote sensing image 1 |
| 表2 用4类算法对遥感图像2滤波结果的PSNR/EPI值比较 Tab.2 Comparison of PSNR/EPI values of filtering results with four algorithms for remote sensing image 2 |
对所有图像均进行了“ 灰度化处理” (因原测试图像为彩色图像, 故笔者将彩色图像转化为灰度图像, 通过对灰度图像进行算法性能测试, 以更清楚地比较各算法性能的优劣)。
图2(a)和图3(a)为2景原始遥感图像, 对其分别加入均值为0、方差为0.09、密度为40%的椒盐噪声, 构成混合噪声图像(图2(b)和图3(b)); 可以看出, 加噪图像中的地物基本模糊不清。图2(c)和图3(c)分别为采用经典的NAS-RIF算法处理后的图像, 图像中的噪声相对于各自的噪声图像来说, 并未得到有效抑制; 尽管该算法具有较好的图像复原功能, 但对于噪声的抑制能力还是有所欠缺。图2(d)和图3(d)分别为采用文献[7]提出的改进型NAS-RIF算法处理后的图像, 相对于采用算法1处理后的图像, 噪声得到一定程度的抑制, 但图像的视觉效果仍没有明显改善。采用文献[2]提出的小波阈值滤波算法处理后的图像如图2(e)和图3(e)所示, 结合表1和表2中的数据可以看出, 算法3具有较好的噪声抑制能力, 图像的视觉效果相对于前2种算法有了进一步的改善。图2(f)和图3(f)为采用本文改进算法的处理结果, 从图像中可以看出, 噪声基本得到抑制, 并且图像的清晰度优于采用前3种算法处理结果的图像, 其视觉效果非常接近于各自的原始图像。
从表1和表2可以看出, 虽然改进型NAS-RIF算法对于高密度噪声的图像复原效果优于经典NAS-RIF算法, 但随着混合噪声的提高, 其算法性能急剧下降; 特别是当高斯噪声方差为0.09、椒盐噪声密度为40%时, 两者性能基本趋于一致, 说明两者的抗噪性不佳。小波阈值法尽管具有较好的噪声抑制能力, 但随着噪声强度的增大, 该算法性能也呈现类似于前2类算法的特点。因此, 可以认为, 单纯依靠噪声滤波或者图像复原难以获得高质量的图像。采用本文改进的算法对遥感图像滤波结果的PSNR值在噪声强度增大的过程中仅下降了约2.3 dB, 其优良的图像处理能力基本得到体现。从表1和表2还可以看出, 在混合噪声强度由小到大的过程中, 本文算法的EPI值始终大于前3类算法, 说明本文算法对遥感图像中目标信息的边缘保持效果较好。
本文提出了一种基于改进自适应NASRIF算法的遥感图像复原方法。该方法在对经典NAS-RIF算法进行适当改进的同时, 融入了伪中值滤波算法。理论分析和实验结果表明, 该算法能够基本实现对受高强度混合噪声干扰的遥感图像的高质量复原。
The authors have declared that no competing interests exist.
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|