
{kind=link}
{kind=link}
{kind=link}
{kind=link}
基于QuickBird影像的城市高大地物阴影检测方法
[姚花琴1  , 杨树文
, 杨树文1 , 刘正军2 , 杨兴旺1 , 李轶鲲1 ]
, 杨树文, 刘正军|
|


第一作者简介: 姚花琴(1989-),女,硕士研究生,主要从事遥感影像处理、GIS系统开发等方面的研究。Email: 250436125@qq.com。
针对利用高分辨率遥感影像检测阴影时受水体和偏蓝色地物影像的影响问题,提出了一种主成分变换和多波段运算相结合的阴影检测方法。首先,统计、分析了QuickBird影像中阴影、水体及建筑物等典型地物的光谱特征; 然后,基于主成分变换和多波段运算相结合的方法识别阴影区域和非阴影区域,并利用多峰直方图阈值算法对阴影进行自动检测; 最后,利用形态学滤波算法对检测结果进行后处理。实验结果表明,该方法对QuickBird影像中的阴影提取具有较高的精度、效率和普适性。
The detection accuracy is likely to be influenced by water bodies and bluish surface features during the detection of shadows on high-resolution remote sensing images. To tackle this problem, this paper proposes a new shadow detection method using principal component transform and multi-band operation. Firstly, the spectral values of typical surface features such as shadows, water bodies and buildings are counted and analyzed in QuickBird images. Secondly, the non-shaded area and shaded area are identified based on principal component transform combined multi-band operation and automatically detected by multimodal histogram threshold algorithm. Finally, the detected result is processed by morphological filtering algorithm. The result shows that this method shows higher extraction accuracy, efficiency and universality for QuickBird images.
高分辨率遥感影像阴影的检测是对其去除和利用的前提。因此, 如何有效、高精度地检测阴影信息具有重要意义[1]。阴影的检测方法主要分为基于模型和基于阴影性质2种。基于模型的方法因其需要有关场景、目标和光照情况的先验知识, 因此具有较大的局限性, 相关研究较少; 基于阴影性质的方法是利用阴影区域的光谱和几何特征来检测阴影[2], 该方法适用范围广, 相关研究较多。针对彩色航空影像, Tsai[3]提出利用HSI(色相(hue)、饱和度(saturation)、亮度 (intensity))、HSV(色相(hue)、饱和度(saturation)、色明度(value))、YIQ(亮度成分(luminance)、色彩从橙色到青色(In-phase)、色彩从紫色到黄绿色(Quadrature-phase))和YCbCr(亮度成分(luminance)、蓝色色度(Cb)、红色色度(Cr))等彩色模型检测阴影, 认为将RGB影像转换到YIQ空间, 利用比值法检测阴影区域的效果最佳。此外, 虢建宏[4]等提出了一种多波段阴影检测的方法和基于能量信息补偿去除阴影的理论模型; Ma[5]等基于HSV色彩空间的阴影特性, 提出了一种归一化饱和度差值指数(normalization saturation difference vegetation index, NSDVI)用于检测阴影, 并利用直方图匹配的方法对阴影区域进行补偿; 王玥[6]等根据高分辨率影像中阴影的性质, 提出了一种基于主成分分析的阴影检测方法; 刘辉[1]等基于主成分变换和HSI模型, 提出了用阴影指数法(shadow index, SI) 检测阴影。
上述方法在特定的应用条件下均取得了较好的检测效果, 但仍存在以下问题: ①影像的不确定性使得检测方法有较大的局限性; ②影像上水体和阴影的灰度值很相近, 二者的区分有一定的难度; ③难以有效地消除偏蓝色地物(真彩色合成图像中呈蓝色或淡蓝色的地物)的影响。为此, 本文在前人研究的基础上[7, 8, 9, 10, 11, 12, 13], 基于QuickBird高分辨率遥感影像数据, 提出一种主成分变换与多波段运算相结合的阴影检测方法。通过大量的实验验证, 该方法能较好地区分水体和阴影, 消除偏蓝色地物的影响, 提高了建筑物阴影检测的精度。
在基于高分辨率遥感影像阴影检测的众多研究中, 如何有效地消除水体、偏蓝色地物等因素对阴影检测精度的影响是遥感影像应用的一个难题。因此, 如何增强阴影和水体光谱值的差异是本文研究的重点。
QuickBird设有全色影像(分辨率0.61~0.72 m)和多光谱影像(分辨率2.44~2.88 m)。其中, 多光谱影像具有红、绿、蓝和近红外4个波段。本文对多光谱影像中阴影、建筑物、道路和水体等信息的光谱特征进行了统计, 其结果如表1所示。
| 表1 阴影及典型地物的光谱特征 Tab.1 Spectral characteristics of shadow and surface features |
分析表1发现, 阴影在红波段亮度值最低, 在绿波段与蓝波段的亮度值之差明显低于水体在绿波段和蓝波段的亮度值之差。
1.2.1 模型设计
在阴影检测模型的构建过程中, 为了尽量降低光谱运算的局限性、遥感影像的不确定性和阈值自动提取等问题的影响, 本研究采用了同向集成计算和影像分块处理方法, 具体为:
1)多光谱同向集成计算。在影像特征信息提取过程中, 简单的光谱运算容易受影像质量、地物复杂度等影响而难以保证信息提取的精度。为此, 本文在研究过程中采用了多光谱、多特征集成计算的方法: 首先, 依据主成分变换在相关性独立和第一主成分信息高度集中的典型特征, 对QuickBird多光谱图像进行主成分变换并获取第一主成分; 然后, 依据阴影在绿波段与蓝波段的亮度值之差明显低于水体在绿波段和蓝波段亮度值之差这一特点, 采用差值运算来进一步增大阴影与其他地物间的差异; 最后, 根据比值运算有利于改善图像质量, 突出目标信息, 增大灰度值均值差异, 缩小方差等特征, 对前2步计算的结果图像进行比值运算, 进一步增大了阴影和其他地物间的灰度值差异, 消除了水体和偏蓝色地物的影响, 并有利于用阈值自动选取算法较为准确地获取阴影分割值。
2)影像分块运算。在前期的研究中发现, 目标在影像中所占比例的多少会影响阈值自动选取算法的精度, 因此, 在本文研究中采用了影像分块处理。另外, 影像分块处理也可以在一定程度上弱化影像不确定性的影响, 从而进一步保证了多光谱、多特征同向集成计算的精度, 提高了阴影检测的精度。
1.2.2 算法流程
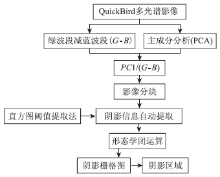
本文的检测算法步骤如图1所示。
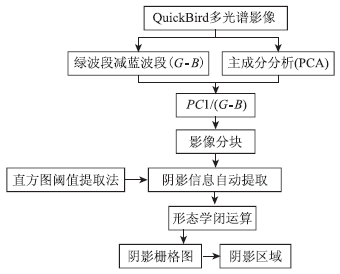 | 图1 阴影检测算法技术流程Fig.1 Technology flowchart of shadow detection algorithm |
第1步, 对实验区影像做主成分变换, 得到第一主成分(PC1);
第2步, 对绿波段和蓝波段做差值运算(G-B), 差值结果记为B1;
第3步, 对第一主成分(PC1)和差值结果(B1)做比值运算(PC1/B1), 比值结果记为B2;
第4步, 对B2采用直方图阈值法分割阴影区域和非阴影区域, 得到最初的阴影区域; 对阴影区域二值图像进行形态学闭运算(先膨胀后腐蚀)剔除孤立点, 填充空洞, 使阴影区域更为连续、完整。
本文通过2个实验区的实验对前人算法和本文算法进行了实验对比与分析。为了便于观察检测效果, 对检测到的阴影区域用白色表示, 非阴影区域用黑色表示。
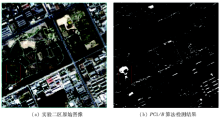
在实验一中, 截取的目标QuickBird多光谱影像数据如图2(a)所示, 图中含有偏蓝色地物(红色矩形框中)和较多建筑物阴影。基于PC1/B方法提取的阴影如图2(b)所示; 基于本文算法提取的结果如图2(c)所示。对比图2(b)和图2(c)可以看出, 本文算法可以有效地检测出阴影区域。
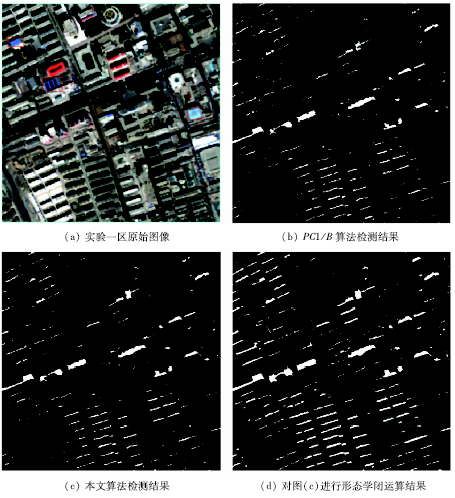 | 图2 实验一区阴影检测结果Fig.2 Shadow detection results of experimental area one |
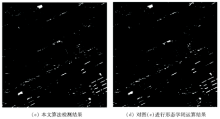
在实验二中, 截取的目标QuickBird多光谱影像如图3(a)所示。图中含有水体、建筑物阴影等。基于PC1/B方法提取的阴影结果如图3(b)所示; 基于本文算法提取的结果如图3(c)所示。对比图3-1(b)和图3-2(c)可以看出, PC1/B检测算法不能有效地区分部分水体和阴影, 致使水体(图3-1(a)(b)红色矩形框中)被误提为阴影区域。本文算法能有效地解决这一问题。通过形态学闭运算处理可使提取出的阴影区域更为连续, 如图2(d)和图3-2(d)所示。
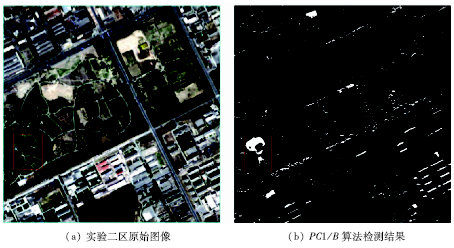 | 图3-1 实验二区阴影检测结果Fig.3-1 Shadow detection results of experimental area two |
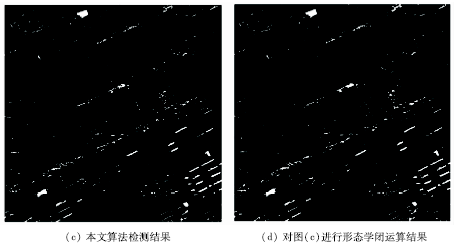 | 图3-2 实验二区阴影检测结果Fig.3-2 Shadow detection results of experimental area two |
本文提出的基于QuickBird影像阴影检测方法能够有效地区分水体和阴影, 且避免了偏蓝色地物等对检测精度的影响, 实现了阴影信息的高精度提取。
本研究的不足之处在于: 阴影检测模型是针对城市高大地物(建筑物、高大树木)构建的, 因此对细小阴影区域的处理还需进一步研究, 改进检测模型, 以提高检测的精度; 在此检测模型的基础上, 若结合影像成像的物理模型进行计算, 将能进一步提高检测精度。
The authors have declared that no competing interests exist.
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|