
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
基于资源三号影像的建筑物高度信息提取方法
[赵志明1, 2  , 周小成
, 周小成1, 2 , 付乾坤1, 2 , 汪小钦1, 2 ]
, 周小成, 付乾坤|
|


第一作者简介: 赵志明(1988-),男,硕士研究生,主要研究方向为遥感信息处理与应用。Email: zzming2014@163.com。
建筑物高度信息的获取是高分辨率遥感影像信息提取研究中的热点问题之一。该文提出了一套结合面向对象分类方法的建筑物高度反演技术方法。首先,利用建筑物和阴影的形态学指数,通过面向对象分类方法提取建筑物轮廓和阴影信息; 然后,采用相交线平均法计算阴影长度; 最后,根据阴影长度和建筑物高度的几何关系模型计算建筑物高度。采用西安市的国产资源三号(ZY-3)卫星遥感数据进行提取试验,通过171栋建筑物的实际测量高度对结果进行验证,获得了91.23%的总体精度,显示出该方法在建筑物高度信息提取研究方面具有一定的现实意义。
The extraction of the information of building height from the high-resolution remote sensing image is a hot research topic in the study of the information extraction. This paper proposes a set of building height inversion techniques in combination with the object-oriented classification method. First of all, through the object-oriented classification method, the building outline and shadow information are extracted by using morphological building and shadow indices; and then, the intersection line average method is employed to calculate the length of the shadow; finally, the height of building is calculated according to the geometric relation model between the shadow length and the building height. The proposed method was validated on domestic ZY-3 satellite remote sensing data of Xi’an City, and the overall accuracy of 91.23% was obtained by verifying the result using the actual measuring height of 171 buildings. The results achieved by the authors have a certain practical significance for the study of building height information extraction.
利用高分辨率遥感影像提取建筑物信息是遥感数据智能解译的重要工作内容之一, 可以为城市建设规划、常规地图制作、城区分析、地籍制图等高精度城市范围内的应用提供可靠资料[1]。城区高分辨率遥感影像中建筑物和道路占了影像内容的80%左右。建筑物作为城区影像地物类别中的主要内容, 其信息提取对充分利用和挖掘影像信息有着重要意义[2]。
城市建筑区高度信息作为建筑物信息的主要内容, 对城市人口估算、监测违章建筑及城市三维建模等至关重要。目前建筑物高度提取的传统方法主要有: 地形图结合建筑物设计图纸或GIS数据库的方法、利用GPS及全站仪等仪器野外测量的方法、利用航空影像立体像对获取建筑物高度的方法。虽然这些方法技术上很成熟, 但是数据获取成本高且费时费力, 数据处理复杂, 不适用于大范围城市建筑物高度信息的提取[3]。随着高分辨率卫星遥感影像的出现, 影像中的阴影信息更加丰富, 采用一定的方法对阴影进行提取, 并根据阴影成像的几何关系模型计算建筑物高度的方法已发展成为建筑物高度提取的主流[4]。但是这种方法目前存在的主要问题是阴影轮廓提取和阴影长度计算。阴影轮廓提取的准确度和阴影长度计算的精度影响着建筑物高度反演结果的精度, 并且还限制大范围城市建筑物高度信息提取的广泛应用性。主要因为这些研究方法不能充分有效地利用高分辨率遥感影像包含的信息, 使提取效率和精度很难满足要求。针对高分辨率目标识别问题, 面向对象分类方法为高分辨率遥感影像信息的快速提取提供了新途径[5]。
本文使用西安市国产高分辨率资源三号(ZY-3)影像数据, 经过传统的遥感影像预处理后, 构建形态学建筑物指数(morphological building index, MBI)和阴影指数(morphological shadow index, MSI), 并结合多尺度优化分割和面向对象分类技术提取高分辨率遥感影像建筑物及其阴影轮廓; 在此基础上, 采用一种易操作、高效率、高精度的方法计算建筑物阴影长度, 并建立建筑物高度与其阴影成像的几何关系模型, 结合太阳和卫星的方位角、高度角反演建筑物高度信息; 最后, 利用传统方法测量的研究区建筑物高度数据对该方法提取的建筑物高度信息进行精度评价, 取得了较好的应用效果。
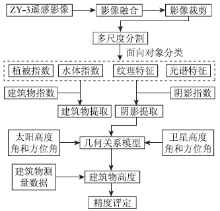
根据研究目的和数据源情况, 本文研究所建立的技术流程如图1所示。主要包括构建形态学建筑物和阴影指数、建筑物和阴影轮廓提取以及建筑物高度反演3个部分。
 | 图1 技术流程图Fig.1 Flow chart of technique |
MBI和MSI是最近发展起来的在高分辨率遥感影像上自动显示建筑物及其阴影的方法。其基本思想是在建筑物光谱-结构特征和形态学算子之间建立一定关系。阴影在空间上与建筑物是很邻近的, 可以将建筑物到阴影的距离作为影像上提取建筑物的一种空间约束条件。构建MBI和MSI要考虑亮度、局部对比度、尺寸、方向性以及形状等方面因子的影响。建筑物光谱-结构特征(对比度、尺寸及方向性等)由一系列线性结构元素重构的顶帽微分形态特征表示, 以表现结构的明暗局部对比[6, 7, 8]。
Huang和Zhang[6]提出的应用改良算法构建MBI和MSI的基本运算过程是: 首先, 计算亮度, 即计算多光谱影像中每个像素的最大灰度值; 其次, 对灰度图像进行开、闭运算, 实现形态学中的白、黑帽变换; 然后, 根据线性结构元素长度的取值, 构建微分形态学剖面(differential morphological profile, DMP); 最后, 求DMP的平均值, 构建MBI和MSI。MBI和MSI作为建筑物和阴影提取的关键特征, 可以有效地减少错分误差, 同时又不增加遗漏误差。
利用面向对象分类技术对高分辨率遥感影像的建筑物和阴影进行提取。首先, 使用一定的分割算法对遥感影像进行最优尺度分割, 将影像分割成内部同质性较好、局部异质性较大的影像对象。然后, 利用影像对象的特征属性, 结合建筑物及阴影指数选择一定范围内的阈值, 并对影像进行分类, 从而提取出建筑物和阴影类别[9, 10, 11]。
1.2.1 多尺度影像的分割
采用基于区域生长的多尺度分割算法进行影像分割, 使分割形成的影像对象平均异质性在局部得到最小化。多尺度影像分割从任一像元开始, 采用自下而上的区域合并算法形成特征基元, 小的对象经过多步骤合并形成大的对象。对象是否合并的判断标准是相邻对象的异质性。当异质性超过设定阈值时, 停止合并。异质性主要考虑对象的光谱异质性和形状异质性。形状异质性用光滑度和紧致度来衡量[12]。在该算法中, 异质性阈值越大, 最终得到的图像对象越大, 因此可以将这种阈值看成是尺度。对于高分辨率遥感影像使用单一尺度进行分割就会出现过分割或欠分割的现象。多尺度影像分割是采用不同尺度参数对影像进行分割, 产生多个影像对象图层, 最后根据分割的效果选择最优尺度分割的对象图层[13, 14]。
1.2.2 特征提取
影像分割后形成了具有同质斑块的对象层, 与此同时影像对象具有了光谱、形状、纹理及层次结构等特征。通过分析归一化差值植被指数(normalized difference vegetation index, NDVI)、归一化水体指数(normalized water index, NDWI)、MBI和MSI, 选择最优特征及阈值来提取目标对象。
首先, 使用NDVI把研究区遥感影像分为植被区和非植被区; 然后, 在非植被区利用NDWI和对象的亮度值特征提取水体; 最后, 利用MSI和亮度特征在非植被区提取阴影[15]。
在建筑物阴影提取的基础上, 创建建筑物的类描述并选择使用MBI、面积、亮度及类间距离等特征。依据上述特征规则人工交互式地选定阈值, 并采并用决策树分析方法进行建筑物提取。根据选定的对象特征及其阈值, 按照对象提取的先后顺序提取出阴影和建筑物。
1.3.1 阴影长度的计算
阴影长度计算是利用阴影反演建筑物高度的关键, 阴影长度计算的精度直接影响着建筑物高度估算的准确性。为了提高阴影长度计算的精度, 本文采用一种易行高效的计算方法: ①利用类似创建鱼网的算法创建线状图层, 保证线状要素与太阳方向(可根据影像拍摄时太阳方位角获得)一致且每2个线状要素间隔1个像元; ②裁剪出线状图层与影像提取出的阴影轮廓面状图层相重叠的局部线状要素, 使每簇局部线状要素完全与相应的阴影轮廓相吻合; ③采用像元个数乘以影像分辨率的方法[16], 计算每个阴影的局部线状要素的长度; ④运用算法找出每一个阴影的局部线状要素长度的众数, 去除无效值, 求出平均值。
1.3.2 建筑物高度的提取
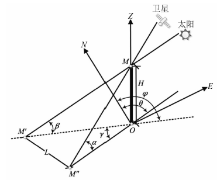
遥感影像上的建筑物阴影是一种特殊的噪声, 它提供了关于建筑物、太阳及卫星之间的几何关系信息。为了简化计算, 假设建筑物处于平原地带、无地形因素的干扰且建筑物结构比较简单, 而且垂直地表。遥感影像成像时, CCD传感器进行逐行逐像元扫描, 在整个扫描过程中, 由于成像时间很短, 每景影像的范围很小, 且由于我国处于中纬度, 所以可以认为每个像元的太阳高度角和方位角, 卫星高度角和方位角与影像中心像元一致[3]当太阳和卫星在建筑物同侧时, 太阳高度角和方位角、卫星高度角和方位角与建筑物高度、阴影的几何关系如图2所示。
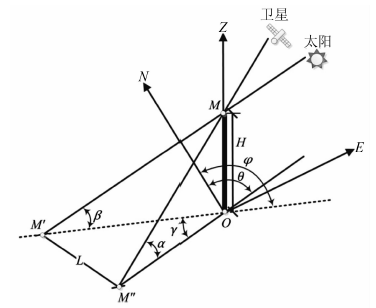 | 图2 太阳和卫星高度角、方位角与建筑物阴影之间的关系Fig.2 Relationship between building’ s shadow and the azimuth, zenith of satellite and sun |
在图2的ENZ坐标系中: N为真北方向; E为沿真子午线指向东的方向; Z为与地面垂直向上的方向; H为建筑物高度; M为建筑物房顶的角点; α 为卫星的高度角; β 为太阳的高度角; θ 为卫星方位角; φ 为太阳方位角; γ 为太阳和卫星方位角的交角; M'为建筑物房顶角点M投影到影像上的点; M″为建筑物房顶角点M在影像上成像的位置;
整理得, 建筑物高度H为
令
K=(tan-2β +tan-2α -2 tan-1β tan-1α cosγ
则, 化简后得建筑物高度H为
由于在影像预处理过程中对原始遥感影像进行了正射纠正, 可认为太阳方位角与卫星方位角相等, 即消除了太阳方位角和卫星方位角的影响, 进一步简化计算建筑物高度H的系数K, 即
当太阳和卫星在建筑物的异侧或者卫星拍摄的遥感影像为正视影像时, 建筑物房顶角点M的阴影在影像上的投影位置点M'和在影像上成像的位置M″也分别位于建筑物的两侧。此时, 建筑物房顶角点在影像上的成像对建筑物阴影没有影响, 即可认为M″点与O点完全重合。那么, 这种情况下建筑物高度H的计算公式进一步简化为
因此, 从理论上讲, 只要知道太阳和卫星的高度角、方位角以及影像上的建筑物房顶角点及其阴影的距离, 就可以计算出建筑物的高度。
为验证本文所提出方法的有效性, 利用西安市区ZY-3全色正视影像和多光谱影像作为数据源进行试验分析。ZY-3全色正视影像空间分辨率2.1 m, 数据处理过程中不需要做正射纠正。
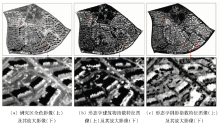
研究区全色遥感影像大小为682像素× 896像素, 如图3(a)所示。从构建的形态学建筑物指数特征图像(图3(b))上可以清楚地看出, 建筑物区域影像变得很亮, 而非建筑物区域影像变得很暗, 增强了建筑物与其周围区域影像的异质性; 同样地, 构建的形态学阴影指数特征图像(图3(c))上阴影区域影像变得很亮, 而非阴影区域影像变得很暗, 也达到了增强阴影与其周围区域影像异质性的目的。
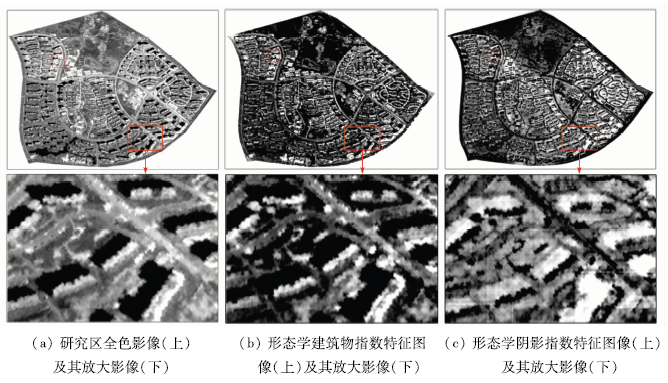 | 图3 研究区全色影像、形态学建筑物和阴影指数特征图像Fig.3 Panchromatic image of study area, feature image of morphological building and shadow index |
本实验运用多尺度分割算法对影像进行了分割, 经过反复的实验对比, 最终采用的分割参数如表1所示。
| 表1 多尺度分割参数 Tab.1 Multi-scale segmentation parameters |
分割形成最理想的对象层后, 用面向对象分类方法提取建筑物及阴影的轮廓信息, 使用的特征及其阈值分别如表2所示。
| 表2 特征提取及其阈值 Tab.2 Feature extraction and its thresholds |
实验结果如图4所示。
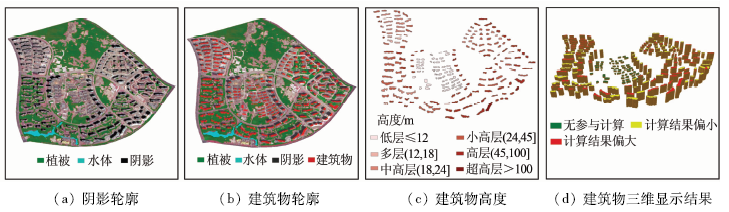 | 图4 实验结果Fig.4 Experimental results |
从图4可以看出, 位于研究区中间部分的别墅群没有提取出阴影, 这与ZY-3卫星影像的空间分辨率有关。别墅建筑物高度(小于12 m)一般在2 m左右空间分辨率的影像上产生的阴影表现约为1个像元, 因此很难从影像上提取出来。
本次实验在研究区中提取了带有阴影的171栋建筑物高度, 将利用全站仪实地测量获得的建筑物高度信息作为验证数据, 对比本实验方法计算的建筑物高度结果, 统计如表3所示。
| 表3 建筑物高度提取精度和提取误差统计 Tab.3 Precision and error statistics of building height extraction |
从表3可以看出, 建筑物高度提取平均误差为正, 且提取结果比较偏大的基本上都是高层建筑物。这是由于当卫星和太阳分别在建筑物两侧时, 建筑物阴影在遥感影像上表现为低亮度值, 比较容易识别。但此时建筑物“ 阴影” 表现在影像上低亮度值区域并非实际意义上的建筑物阴影, 即建筑物的落影, 它还包括了建筑物的本影(背光墙面)在内。由于在计算高层建筑物高度信息时掺入了建筑物本影的影响, 因而导致反演结果大多偏大。
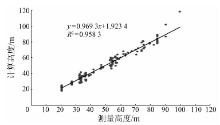
虽然从表3看到最小误差与最大误差相差较大, 但误差分布在5.7~18.36 m区间的建筑物个数为15, 且误差越大的点就是表示离拟合线越远的点。一方面, 从图5可清楚看到误差较大的点大多位于建筑物高度较大的位置且数量极少, 大部分点都很接近拟合线, 建筑物测量高度与计算高度的相关系数为0.958 3, 说明二者有很好的线性相关性; 另一方面, 由表3可得, 对于样本数171栋建筑物求得的误差绝对值的平均值为3.19 m, 平均相对误差7.03%, 这都正好肯定了本研究方法的稳定性和可靠性。因此对于空间分辨率在2 m左右的卫星遥感数据, 按最小1个像元误差计算, 建筑物高度提取的临界误差为± 5.7 m, 即高度提取精度为± 5.7 m。根据表3的统计可以得到建筑物高度提取精度为91.23%, 这对于较大范围城市建筑物高度提取具有一定的参考价值。
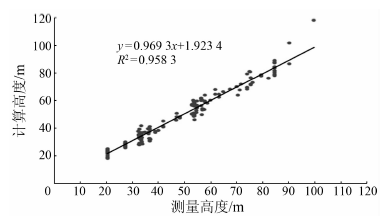 | 图5 研究区建筑物高度散点图Fig.5 Scatter diagram of building height in the study area |
1)本文基于ZY-3卫星影像进行城市建筑物高度提取, 利用形态学建筑物-阴影指数作为关键特征, 应用多尺度优化分割和面向对象分类技术提取建筑物及其阴影, 并提出一种计算建筑物阴影长度的高效率、高精度的方法。相对于已有的建筑物信息提取方法, 本研究系统地给出阴影长度计算和利用阴影提取建筑高度信息的基本过程。该方法具有操作简单灵活、快捷高效及提取精度较高等优势。
2)ZY-3卫星影像适用于中高层及高层建筑物的高度信息提取。对于高度小于12 m的低层建筑物, 其高度难以反演; 对于超高层建筑物(大于100 m), 由于受到本影的影响比较大, 反演出的建筑物高度往往比真实值偏大。下一步工作是要把本研究方法推广至其他卫星遥感数据, 并对应用结果进行对比。
3)随着遥感影像分辨率的提高, 该方法具有应用于更大范围城市建筑物信息提取和变化检测的前景。实现半自动、甚至全自动地计算阴影长度以及把阴影信息附加给相关建筑物的技术, 对于城市大范围建筑物高度信息提取至关重要, 这方面还需要做进一步研究。
The authors have declared that no competing interests exist.
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
|