



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
PhotoScan Pro软件在无人机应急航摄中的应用
[赵云景 , 龚绪才, 杜文俊, 周力]
, 龚绪才, 杜文俊, 周力]
, 龚绪才, 杜文俊, 周力]
|
|


第一作者简介: 赵云景(1982-),男,硕士,主要从事无人机航摄工作。Email: zyj3500@qq.com。
在无人机应急测绘保障中,存在航线设计不规则、航摄倾角过大等问题,如果利用传统航摄软件处理这类影像将会消耗较长的时间,进而严重影响应急测绘保障服务的时效性。为此,提出了一种利用PhotoScan Pro软件快速生成正射影像和点云的方法来解决此类问题。通过在多次地质灾害预防及处置中的实际应用,表明该方法能够为测绘应急保障服务提供及时有效的影像数据。
Due to irregular flight route, low image quality and unstable flight attitude, it is really difficult to perform UAV imagery data processing using traditional photogrammetric software. For emergency response, a stable,highly automatic and time-efficient software solution is always highly demanded. In this paper, the authors present a UAV imagery solution for emergence using Agisoft PhotoScan Pro software to offer orthomosaic and dense point cloud service. It is held that this method can provide timely and effective scientific image for emergence, as shown by several emergency response practical applications.
云南省是自然灾害多发、频发的省份之一。频繁的自然灾害造成了巨大的人民生命和财产损失。利用无人机的机动灵活、航摄周期短等优势可以快速获取相关影像, 为灾区的灾害排查和人员施救提供直接有效的数据。但是, 如果采用传统摄影测量软件对无人机影像进行后期处理, 则对航线敷设、飞行控制及影像质量等有严格要求; 同时, 在自然灾害发生的地区, 客观上也会存在诸如天气与地形等和航摄有关的不利条件, 这将导致影像的后期处理时间过长, 影响无人机影像时效性的发挥。如何克服这些困难, 并能在第一时间内获取灾区可靠的影像数据, 本文通过救灾实例, 结合PhotoScan Pro软件自身功能特点和非常规的航线设计, 总结出了一些无人机应急航摄数据处理的经验和方法; 最后, 通过对多款无人机航摄软件应用的比较, 认为PhotoScan Pro软件的数据处理效果较好。
PhotoScan Pro是一款基于计算机视觉自动进行三维重建的软件。该软件在应用时无需设置初始值, 无需相机检校和控制点数据, 依据最新的计算机多目视觉影像三维重建技术, 就可以对具有影像重叠的照片进行处理; 也可以通过给予的控制点生成真实坐标的三维模型。无论是航摄像片还是高分辨率数码相机拍摄的影像, 都可以使用该软件进行处理。整个工作流程都是完全自动化的[1]。具体来说, PhotoScan Pro软件能够支持倾斜影像、多源影像、多光谱影像及多航高、多分辨率影像等各类影像的自动空三处理; 具有影像掩模添加、畸变去除等功能, 能够顺利处理非常规的航线数据或包含航摄漏洞的数据; 同时它还支持多核、多线程CPU运算, 支持GPU加速运算, 支持数据分块拆分处理, 高效快速地处理大数据; 除此之外, 软件操作简单, 容易掌握。
PhotoScan Pro与传统航摄软件最显著的区别在于它使用的是运动信息中恢复三维场景结构(structure from motion, SfM)的方法。SfM三维重建的主要过程如下:
1) 利用SIFT[2]算子从每张影像上提取特征点并获取其对应的Descriptor;
2) 根据POS或其他约束关系选出可能具有重叠关系的像对;
3)对每一像对Descriptor进行匹配, 并使用RANSAC算法[3]进行粗差剔除, 消除误匹配;
4)根据计算机多目视觉原理, 将各像对匹配的同名像点连接统一起来, 在逐次平差迭代过程中, 剔除粗差, 估算出视觉场景中相机和由匹配点形成的稀疏点云的相对位置;
5)结合相机的GPS和像控点的位置坐标, 通过Damped Least-Squares(DLS)算法来获取相机和稀疏点云的真实空间位置。
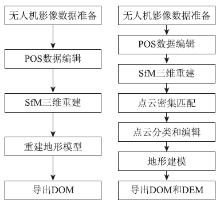
根据PhotoScan Pro特点制定的无人机航摄应急影像数据的处理流程如图1所示。
 | 图1 数据快速处理(左)及一般快速处理(右)流程Fig.1 Flow chart of data fast processing(left) and general fast processing(right) |
在快速处理流程中(图1(左)), 将不再执行点云密集匹配步骤, SfM重建后便利用稀疏点云建立地形格网模型, 通过格网DEM输出DOM, 以最快速度对无人机应急航拍影像进行拼接处理; 在一般快速处理流程中(图1(右))进行了密集匹配, 通过对密集点云的分类编辑修正导出DOM的拼接错误, 对影像拼接质量有严格要求时可采用此方法。
PhotoScan Pro的掩模功能可以避免因影像大面积遮挡而无法进行自动拼接的问题, 这是其他传统摄影测量软件所不具备的功能。
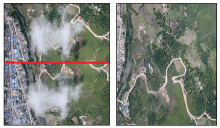
自然灾害突发时, 常伴随着多云或雷雨天气, 特别像云南省, 由于地形气候的特殊性, 天空经常会出现高度不足300 m的散云, 影响航摄影像的质量。以2014年“ 5· 24” 盈江地震的应急航拍为例(图2), 同航线上连续2张受灾城镇的影像均有散云遮挡(称影像“ 进云” 现象), 拍摄时遇到这样的情况一般采取的方法是:
 | 图2 “ 进云” 单片截图(左)和“ 去云” 拼截图(右)Fig.2 Cloud spliced image(left) and cloud removing image(right) |
1)在航摄区域的同位置采用多次往返航线设计和拍摄, 如图3所示。在设计航线时只需要保证一定的航向及旁向重叠即可。
 | 图3 非常规应急航线设计Fig.3 Unconventional emergency routes design |
2)利用PhotoScan Pro逐一对单张照片中的云雾进行掩模, 如图4所示; 再按照PhotoScan Pro生成DOM与DEM的操作流程来进行[4]。
 | 图4 掩模影像Fig.4 Image added masks |
图5为2012年安宁市王家滩森林火灾的实例。火情是以道路图层作为空间位置参考来判断的。
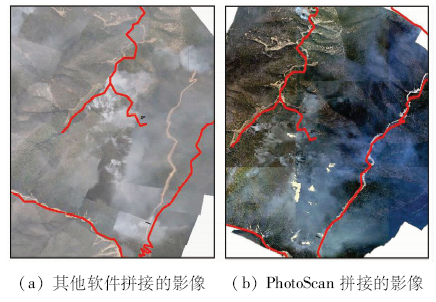 | 图5 王家滩拼接影像Fig.5 Wangjiatan mosic image |
从图5可以看出, 与采用掩模功能的PhotoScan Pro软件拼接的影像相比, 采用其他摄影测量软件拼接的影像在质量上明显要差。采用PhotoScan Pro软件拼接的影像虽然会出现部分空洞, 但地物影像在空间位置上不会出现重大偏差, 对于过火面积的估算和火灾防范都具有很高的参考价值。
运用PhotoScan Pro的掩模功能可以处理“ 进云” 影像, 它对单独影像云层覆盖率没有特别要求, 只需要通过不同时间对相同地区进行多次拍摄, 最终达到影像内容能够拼凑成一个完整影像目的即可。在实际作业中, 云层或烟雾覆盖率达到80%的单片依然参与计算。在掩模的编辑上, 软件提供人工圈定和自动圈定2种方式, 整个添加掩模的时间与进云的单片数量成反比。在实际工作中, 除了特殊情况, 一般进云的影像在整个架次中所占的比重都是很小的, 对比采用降低飞行高度或者等天气好后重新航拍等方法来说, 效率上无疑是大大提高了。
使用此功能前, 需要首先利用PhotoScan Pro生成该区域的三维模型。在生成格网时, 需采用以下参数, Surface type: Height-field; Interpolation: Enabled or Extrapolated[5]。将带有地理参考信息的模型通过去除多余次要面及封闭模型2个步骤后, 就可以利用体积量算功能来求解模型的体积了。图6示出了2014年福贡县城西面腊土底河一处的山体滑坡, 利用PhotoScan Pro对四旋翼无人机所获得的0.05 m高分辨率影像进行处理, 结合体积量算功能快速估算滑坡体方量。滑坡体体积由坍塌的土方量与地表堆积的土方量相加而得。
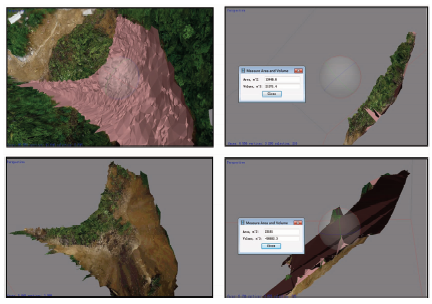 | 图6 滑坡体影像(左: 滑坡区域; 右: 体积量算界面)Fig.6 Landslide image |
从图6可以看出, 估算的体积为78 173 m3左右。从滑体的方量大小看, 属于大型滑坡。
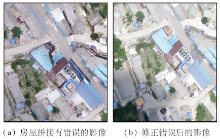
利用地面点云分类功能纠正拼接后房屋扭曲现象。通过对密集点云的自动或手工方式将房屋、水域等地物进行分类, 用于重建网格并生成新的DTM, 最终输出新的DEM和DOM[6]。在实际应用中, 当影像主要内容为村庄和山林混杂时, 自动分类效果不会很理想, 此时需要对点云进行人工分类, 这将会花费许多时间。在应急测绘保障时, 取而代之的是屏蔽所有无错误单片, 仅重新输出错误位置所在单片的DOM, 再利用这张DOM进行替换的方法来处理影像扭曲问题。图7就是利用此方法对“ 5· 24” 盈江地震苏典乡房屋拼接错误进行改正的例子。
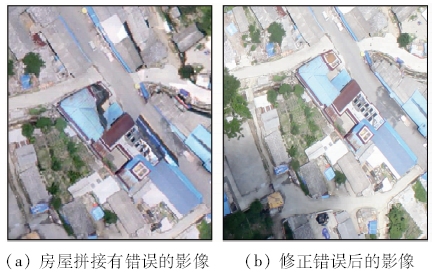 | 图7 盈江影像拼接错误修正Fig.7 Yingjiang image mosaic error correction |
以元阳老集寨无人机影像为实验数据, 对PhotoScan Pro软件与其他比较成熟的同类后期软件如IPS与PPSG的处理效果进行了对比。摄区囊括了云南省地形的绝大部分特征, 航带之间旋偏角很大, 有航摄漏洞; 总体旁向重叠率在10%~90%间; 除此之外, 地表还存在大面积植被覆盖。
测试结果表明, 3款软件均具有较强的数据处理能力。表1列出了不同软件的影像处理时间。
| 表1 老集寨无人机影像数据处理时间的比较 Tab.1 Processing time of Laojizhai UAV data (min) |
从表1可以看出, PhotoScan Pro的处理时间较短, 主要与该软件不需进行单片畸变处理而只需要整理POS数据有关。
其次比较精度, 如表2所示, 选择像控点50点, 检查点抽取10点; 检查点抽取分布原则为测区内部均匀分布, 随机抽取。
| 表2 老集寨无人机影像数据的平差结果 Tab.2 Adjustment results of Laojizhai UAV data |
3款软件均能满足《数字摄影测量空中三角测量规范》(GB23236— 2009)中对精度的要求。但3款软件各具优缺点。PhotoScan Pro与IPS的处理速度较快, 但IPS是全英文系统且不支持掩模功能, 在易用性与应急处理能力上有所欠缺; PhotoScan Pro缺乏正射影像编修和直接三维点云环境支撑下的浏览量测能力, 而PPSG又恰好能弥补这点不足。
前面已经提到, 在应急测绘保障服务中首要的是时间保障, 之所以在结果比较中加上交互式空三处理, 也主要是为了添加像控点后评定软件处理精度所需。在应急测绘保障中, 这个步骤通常是不具备实施的条件的。一般处理得到的影像结果为具有WGS-84地理坐标信息的可量测影像, 所以就应急航摄而言, PhotoScan Pro这款软件无疑是首选。
本文通过对PhotoScan Pro软件SfM三维重建方法的理解, 配合PhotoScan Pro的优缺点, 有针对性地制定出了无人机在应急航拍中影像处理的快速流程和一般快速流程。面对实际应急救灾中所遇到的困难, 对软件中的各项功能进行充分合理运用, 并由此改变了无人机航线设计的方法。其中利用PhotoScan Pro中掩模功能, 并配合与之相应的非常规航线设计方法, 利用DEM输出单张DOM来改正有拼接错误影像的方法均是在实际作业中总结的经验体会, 并在多次应急测绘保障服务中得到了较好的应用效果, 解决了应急救灾中对时间和影像质量的双重需求。除此之外, 现阶段计算机视觉技术已经对摄影测量产生革命性的影响, 许多类似优秀的软件也孕育而生, 如IPS和PPSG等, 它们都各自具有不同的优缺点。如何发挥各种软件的长处, 进一步提高PhotoScan Pro与其他软件的综合应用, 还需要进行更深入研究。
The authors have declared that no competing interests exist.
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|