

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
基于PCA的变化向量分析法遥感影像变化检测
[黄维1, 2  , 黄进良
, 黄进良1 , 王立辉1 , 胡砚霞1, 2 , 韩鹏鹏1, 2 ]
, 黄进良, 王立辉|
|


第一作者简介: 黄 维 (1990-),女,硕士研究生,主要研究方向为遥感技术在资源环境中的应用。Email:vivian090414@sina.com。
为实现对土地覆盖变化的遥感监测,研究了一种基于不同年份单时相遥感数据提取差异影像、自动确定变化阈值提取变化区域的新方法。以南通市Landsat8 OLI影像为例,对2期影像分别进行主成分分析(principal component analysis, PCA); 取前3个主分量进行变化向量分析(change vector analysis, CVA),构造变化检测差异影像,并与传统PCA法和CVA法构造的差异影像进行对比; 对3景差异影像分别用传统全局阈值法和局部最小错分概率法自动确定阈值,分别提取变化区域,得到6景变化区域图。利用目视解译样点进行精度评价的结果表明,改进后的基于PCA的CVA法提取的变化区域总体精度可达92.78%,Kappa系数可达0.842 6,证明使用该方法可有效地进行不同年份单时相遥感数据的变化检测。
In order to monitor the change of land cover with remote sensing technology, the authors studied a method which is based on single-temporal remote sensing image in different years for extracting differences between the images and determining the change threshold automatically to extract the change area. The research took Landsat8 OLI images of Nantong City as an example. Principal component analysis (PCA) was carried out respectively on two images. After the PCA transformation, the first three components were operated based on change vector analysis (CVA) to get the difference image for change detection, which was compared with the extraction results based on the traditional PCA method and CVA method. Overall minimum error probability threshold determination method and local minimum error probability method were utilized to automatically determine the threshold of the three difference images and to get six change area images. The accuracy was evaluated by visual interpretation, and the results show that the overall accuracy of the new method can reach 92.78%, with kappa coefficient up to 0.842 6. This method is proved to be feasible and effective for extracting change area by single-temporal remote sensing image in different years.
随着人类对土地资源改造的日趋频繁, 土地覆盖/利用状态信息的及时更新已成为亟待解决的问题, 而利用遥感数据的大面积同步观测和实效性等特点进行土地覆盖变化检测是一种有效的技术手段[1]。通常变化检测主要有2种方法: ①分类后变化检测; ②对影像直接进行变化检测[2, 3, 4, 5]。为了避免因分类不精准而累积的误差, 很多学者直接针对影像进行了变化检测的研究: 莫德林等[6]实现了几种基于主成分分析(principal component analysis, PCA)的遥感影像变化检测方法, 并比较了它们的优缺点; 陈晋等[7]基于变化向量分析法(change vector analysis, CVA)提出了一种双窗口变步长阈值搜寻的新方法, 用于提取土地覆盖变化信息; 廖明生等[8]引进典型相关分析的基础理论, 将不同时相的多通道遥感数据视为分组的多元随机变量, 利用典型变换进行了遥感数据的多元变化检测; 魏立飞[9]则围绕基于随机场模型的遥感影像变化检测进行了研究, 主要包括如何智能化地确定变化阈值、如何利用影像所有波段的变化信息以及如何利用影像中的多种特征进行多元变化检测等问题。针对上述方法中差异影像构造的合理性和阈值确定的自适应性等问题, 本文研究了一种综合PCA和CVA的差异影像构造方法, 利用局部最小错误率阈值确定方法提取变化信息; 并以南通市为例进行实验, 将本文新方法与传统方法进行对比验证。
PCA法 [10, 11, 12, 13]是基于统计特征的一种多维正交变换。假设向量X=(x1, x2, …, xn)T表示影像的像元矢量, n为波段数, 将多光谱影像X与变换矩阵A进行线性组合, 产生1景新的多光谱影像Y=(y1, y2, …, yn)T。其中变换矩阵A是多光谱影像X的协方差矩阵的特征向量矩阵的转置矩阵。由于变换前各波段之间有很强的相关性, 经过PCA变换输出影像Y的各分量yi之间将具有最小的相关性。
传统PCA法构造差异影像是对2期影像分别进行PCA变换, 然后利用第一主成分进行差值运算。
CVA法[14, 15, 16]由简单差分法扩展而来。变化向量是描述从时相1到时相2变化的方向和大小的光谱变化向量。设时相为t1和t2的2景影像的像元灰度矢量分别为G=(g1, g2, …, gk)和H=(h1, h2, …, hk), k为像元数, △ G包含了2景影像中的全部变化信息, 变化强度由‖ △ G‖ 决定, 即
按照‖ △ G‖ 的定义, ‖ △ G‖ 越大, 影像的差异越大, 发生变化的可能性越大。
传统的基于PCA的差异影像的构造是对PCA变换后的第一主成分进行差值运算, 这样得到的差异影像噪声较少; 但由于只利用第一主成分构造差异影像, 得到的变化信息会有所缺漏。王丽云等[17]先对2期影像的差值影像进行PCA变换, 再进行CVA分析, 从而构造差异影像。
本文提出的基于PCA的CVA法(以下简称新算法)构造差异影像的步骤是: 首先对影像进行PCA变换, 得到相关性很小的几个主分量; 然后选取前3个主分量进行CVA分析, 得到信息充足且噪声较少的差异影像。
假设影像中发生变化区域的均值和方差分别为μ 1和
E(T)=QE1(T)+(1-Q)E2(T) 。 (2)
令∂ E(T)/∂ T=0, 则
当
遍历阈值范围[T1, T2], 当T=Tm时, 根据式(2)— (4)得到错误率最小时的Tn; 当△ T=|Tm-Tn|小于某一极小常数时, 停止遍历, 此时的Tm与Tn的均值即为最佳阈值[18, 19]。
由于差异影像并不是典型的双峰灰度图, 全局阈值并不能很好地表达变化细节; 因此本文提出了一种基于直方图曲率的局部最小错分概率法, 利用移动窗口对窗口内的影像计算局部阈值, 具体步骤如下:
1)根据影像大小确定移动窗口大小a× a, 对窗口i设定初始阈值T, 其中i=1, 2, …, n(n为窗口的个数), T∈ [T1, T2](T1和T2分别为灰度最小值和最大值);
2)在窗口i内部逐像元地对比像元灰度值p与阈值T的大小, 当p> T时标记为变化, 反之标记为未变化;
3)计算窗口内变化像元与未变化像元的均值μ 1和μ 2、方差
4)对各窗口内部的像元以对应的局部阈值进行二值分割, 得到最终变化图斑。
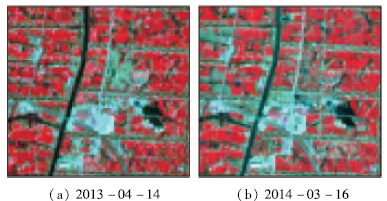
用1组获取时间分别为2013年4月14日和2014年3月16日的覆盖江苏省南通市的Landsat8 OLI影像数据进行实验(图1)。具体预处理包括:
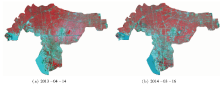
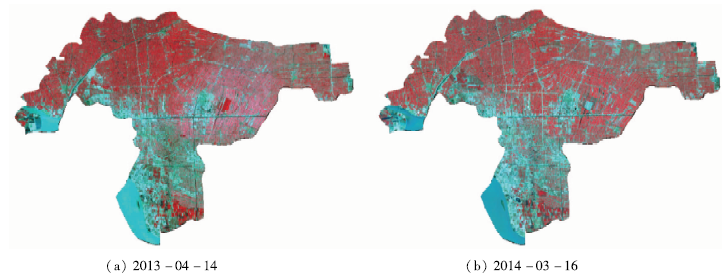 | 图1 南通市Landsat8 OLI B4(R)B3(G)B2(B)假彩色合成影像Fig.1 Pseudo color images of Nantong City composed of Landsat8 OLI B4(R)B3(G)B2(B) |
①对2景影像分别进行全色波段与多光谱波段(第6波段除外)数据融合; ②以2013年影像为基准, 对2014年影像进行几何纠正和相对辐射校正, 其中相对辐射校正采用直方图匹配法; ③参照南通市矢量边界进行影像裁剪, 使输出影像为多边形。经预处理后的2景B4(R)B3(G)B2(B)假彩色合成影像如图1所示。
3.2.1 构造差异影像
分别采用CVA法、传统PCA法和新算法对原始影像(图1)进行运算, 构造差异影像, 得到3景差异影像(图2)。其中经PCA变换后的PC1的方差贡献率为96.9%, PC1, PC2和PC3共同的方差贡献率达到99.9%。
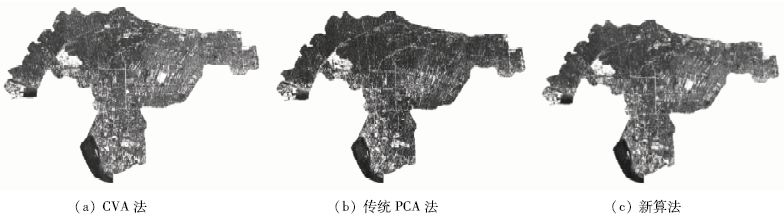 | 图2 基于3种方法的差异影像Fig.2 Difference images based on 3 methods |
从图1可以看出, 主要变化表现为中部地区有较多道路变化, 西部长江支流处、东部通州区附近和南部南通市市中心有较多居民点或工业区变化, 还有散布在各处的耕地变化。对比3景差异影像(图2)可以看出, 新算法(图2(c))比传统PCA方法(图2(b))保存了更多的变化信息, 例如北部的耕地变化和通州区人工变化区域的亮度都更为显著; 比原始影像直接进行变化向量分析(图2(a))更能抑制噪点, 并且发亮区域和发暗区域的对比度更大, 便于更好地确定适当的阈值对差异影像进行二值化。
3.2.2 确定阈值
对新算法得到的差异影像, 分别以基于直方图曲率的最小错误率全局阈值确定法和局部阈值确定法进行二值化, 其中局部阈值确定法分别取窗口大小为500× 500, 350× 350, 200× 200, 50× 50和10× 10进行对比分析, 结果如图3所示。
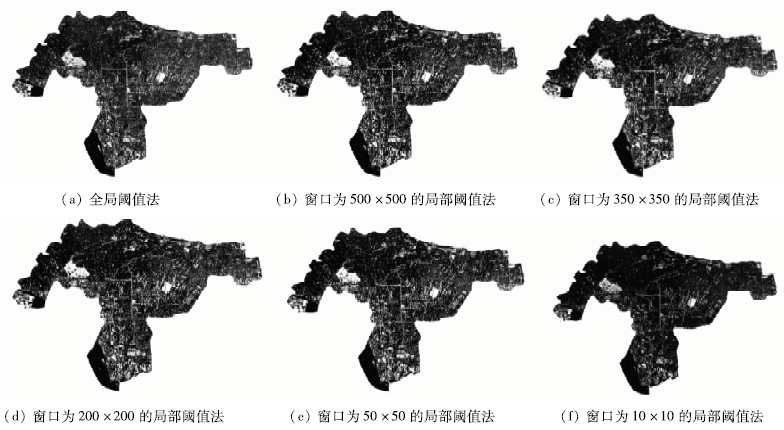 | 图3 基于新算法的不同窗口提取的变化区域Fig.3 Changed areas extracted by different windows based on new algorithm |
从图3可以看出, 用局部阈值法提取的变化区域图在整体上的连续性较好, 没有出现明显的接边问题, 这与变化区域只是整景影像范围内较小区域有关。选取南通市西部的1块局部影像进行放大和对比分析(图4)。
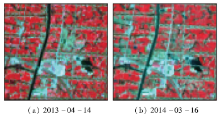
 | 图4 南通市西部局部影像Fig.4 Local images of west part in Nantong City |
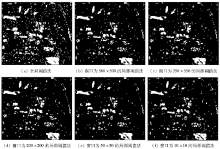
从图4可以看出, 2013年4月至2014年3月间该区域主要变化为人工表面的变化, 在左上部、中部和右下部有较明显的人工表面增多。对该区域采用新算法所得到的差异影像中, 使用2种阈值确定方法得到6个变化区域二值图像(图5)。从图中的对比可以看出, 2种阈值确定方法都可以较为准确地提取出主要的变化区域, 其中局部阈值法通过改变窗口大小进一步分析了窗口大小对噪声的抑制作用。经仔细解译可以发现, 窗口大小为500× 500时的局部阈值法较全局阈值法对变化提取中噪声的抑制效果更为明显; 而在窗口大小逐步减小的过程中, 噪声点数先缓慢减少, 到达一定大小后又有所增加(在窗口大小为50× 50时噪声点最少, 但在窗口大小减小到10× 10时噪声点又有所增加)。在上述窗口中, 窗口大小为50× 50时不仅能抑制变化提取中的噪点, 而且仍可以提取出较为完整的变化图斑。
 | 图5 变化区域二值图像Fig.5 Binary images of changed areas |
本文采用样点检验的方式对不同方法变化提取的精度进行评定。样点检验可按式(5)计算所需的最少随机抽样点数[20], 即
n=p(1-p)(u1-a2/2)/d2 , (5)
式中: n为最少的抽样点的个数; p为分类正确的百分比; u为从正态分布概率表中所查的对应的置信水平的值; d为误差允许范围。取α =0.1(即置信水平为95%), 查表可知此时u=1.96; 误差允许范围d=± 5%; 图5中不同变化提取方法实验得到的p分别为0.84, 0.86, 0.88, 0.87, 0.82和0.92; 对应得到的n分别为207, 185, 162, 174, 227和113。为了在同一套样本下验证各方法的精度, 选取了230个样本点进行验证。
通过目视解译, 在GoogleEarth平台上从2013年4月15日和2014年4月14日获取的高分辨率影像中选取变化与未变化样点, 其中变化样点83个, 未变化样点147个; 计算各方法变化提取的错分概率、漏分概率、总体精度及Kappa系数4个指标(表1)。
| 表1 南通市2013— 2014年变化检测各算法精度 Tab.1 Accuracy of different change detection algorithms for Nantong city from 2013 to 2014 |
其中, 通过上述分析, 局部阈值确定法的窗口大小设置为50× 50。
从表1可以看出, 2种阈值方法中, 新算法构造的差异影像的提取精度都比另外2种差异影像的提取精度更高, 且漏分概率更低; 传统PCA法得到的差异影像提取的错分概率远低于另2种算法, 而漏分概率远高于另2种算法。相对于全局阈值法, 局部阈值法对新算法和CVA法构造的影像的提取精度都有所提高, 却对基于传统PCA算法的提取精度有所降低, 这是因为传统PCA算法丢失了很多原始信息, 对变化细节的表现力不够; 加之局部阈值法对噪声的抑制, 使得变化信息更加缺失。
1)本文以江苏省南通市Landsat8 OLI影像为例, 利用基于主成分分析(PCA)的变化向量分析(CVA)法构造的差异影像, 采用局部最小错分概率法确定阈值, 提取出变化区域。实验表明, 本文提出的新算法有效可行, 并可在尽量保留变化细节的基础上抑制了噪声。
2)用新算法计算差异影像比传统PCA方法保存了更多的变化信息; 比CVA法更能抑制噪声, 且发亮区域和发暗区域的对比度更大, 便于更好地确定适当的阈值对差异影像进行二值化。
3)局部阈值法提取变化的结果表明, 变化提取效果与窗口大小设置有关; 在窗口大小逐步减小过程中, 噪声点数先是缓慢减少, 到达一定大小后又有所增加。
4)相对于全局阈值法, 局部阈值法对新算法和CVA法构造的影像的提取精度都有所提高。但局部阈值法对基于传统PCA算法的提取精度有所降低, 这是因为传统PCA算法丢失了很多原始信息, 对变化细节的表现力不够; 加之局部阈值法对噪声的抑制, 使得变化信息更加缺失。
由于局部窗口法确定阈值时需要通过移动窗口进行运算, 致使运算时间较长; 为了缩短新算法的运算时间、提高效率, 今后可考虑对影像分块进行并行处理。
The authors have declared that no competing interests exist.
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
|
| [17] |
|
| [18] |
|
| [19] |
|
| [20] |
|