{kind=link}
{kind=link}
地基合成孔径雷达干涉测量技术及其应用
[刘斌1  , 葛大庆
, 葛大庆1 , 李曼1 , 张玲1 , 王艳1 , 郭小方1 , 张晓博2 ]
, 葛大庆|
|


第一作者: 刘 斌(1982-),男,博士,主要从事星载和地基InSAR技术理论与应用研究。Email: lbin0226@163.com。
在简要讨论地基合成孔径雷达干涉测量(ground-based interferometric synthetic aperture radar,GB InSAR)技术原理的基础上,归纳了常规地基InSAR形变测量的主要处理流程。全面总结了地基干涉测量雷达系统的主要类型及其发展趋势,地基InSAR技术的主要应用领域以及目前存在的问题,对比分析了地基和星载InSAR在形变测量上的优势和不足。
On the basis of a detailed discussion on the principle of GB InSAR, the main data processing and analysis stages for estimating deformations starting with the GB InSAR observations are described. This paper gives a review of the main types and development trend of ground-based radar system, the main application domain and some existent problems of GB InSAR, and then summarizes the pros and cons of ground-based and space-borne InSAR for deformation monitoring.
星载干涉测量雷达系统的优势为覆盖范围广、监测精度可靠, 能以较高频率和密度获取观测区的变形状况, 适用于具有一定空间尺度的形变场连续监测。针对地面多类型、多尺度形变测量的监测技术需求, 星载雷达系统仍然存在如下缺点: ①观测实时性受制于卫星重访周期, 难以满足动态和应急监测需要; ②雷达入射角由于卫星飞行方向固定(升轨或降轨), 且单一, 边坡观测存在叠掩、阴影和顶底倒置等现象, 难以满足边坡监测等观测需要; ③进行山体滑坡、矿山边坡失稳、冰川运动等局部变形监测时, 星载干涉测量雷达系统的空间分辨率、覆盖范围往往难以达到最佳匹配。
地基干涉测量雷达系统是利用布设在监测对象附近的地面雷达测量系统, 实现对被观测对象的近实时动态连续监测。由于采用的雷达波长更短, 因此测量精度能达到毫米―亚毫米级, 能够根据观测目标形变场的演化特征灵活安置, 弥补星载雷达重访周期固定、入射角度单一等不足。
本文在详细讨论地基合成孔径雷达干涉测量(ground-based interferometric synthetic aperture radar, GB InSAR)技术原理的基础上, 归纳常规GB InSAR形变测量的主要处理流程, 并通过总结地基干涉测量雷达系统的发展现状, 以及GB InSAR技术的应用领域, 对比分析地基和星载InSAR在形变测量上的优势和不足, 全面掌握地基干涉测量雷达系统的实用能力。
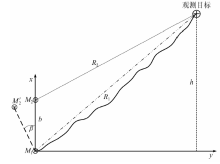
一般来说, 地基雷达观测期间的空间基线为0, 因此地形相位为0。为了确定地形相位, 2次扫描过程中, 垂直移动传感器的位置可以产生空间基线。如图1(据文献[1]修改)所示, 轻微平移滑轨, 使得2次观测过程中雷达传感器的位置发生变化(M1→ M2), 将2次观测获得的复数影像共轭相乘, 那么得到的干涉相位中就会包含观测区域的地形相位。观测相位与地形的关系可以表示为
根据图1中的几何关系, 式(1)可以写为
式中: R1和R2分别为第1次和第2次测量距离; λ 为波长; b为M1和M2之间的距离(空间基线); h为目标点的高程。假定(b/R)< < 1, 且R1-R2< < R1, 式(2)可近似简化为
如果M2位于M'2位置, 空间基线b不在垂直方向上, 而产生了基线夹角β , 那么需要进行进一步校正, 即
式中
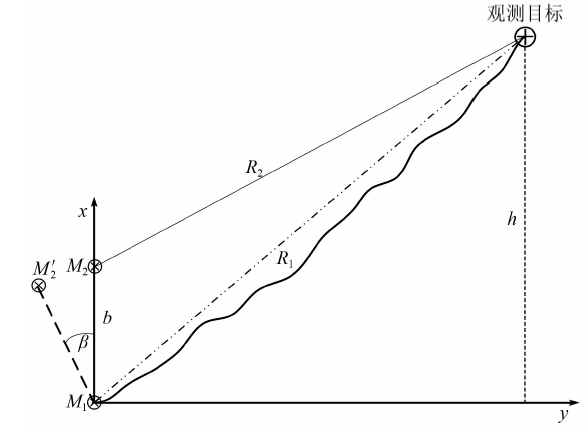 | 图1 GB InSAR示意图(据文献[1]修改)Fig.1 Ground-based interferometric synthetic aperture radar |
按照基线的类型, 干涉相位△ φ 21主要分为4部分, 即
式中: φ topo为空间基线引起的地形相位; φ disp和φ atm为形变和大气影响产生的时间相位变化; φ noise为噪声; n为整周模糊数。式(5)左侧为观测干涉相位, 而右侧含有未知参数。为了求解地形相位, 式(5)可写成
2次扫描期间垂直移动传感器的位置可以产生空间基线Bs, 由于存在时间基线Bt, 这样时间基线相关分量仍是方程的一部分。采用2个具有一定距离的垂向分布的天线同时接收信号, 可以大大简化方程的计算, 然后估计函数模型中的时间基线相关分量φ disp和φ atm。
对于地基雷达形变监测, 假定空间基线为0, φ disp可以写为
φ disp=△ φ 21-φ atm-φ noise+2π n 。 (7)
假设采样时间间隔为△ t, 为了避免相位模糊, 目标点的线性形变速率v必须满足|v|<
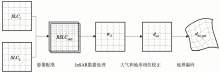
GB InSAR形变测量数据处理与星载InSAR类似, 但其处理流程相对更为复杂。GB InSAR形变测量处理主要流程如图2所示(据文献[2]修改)。
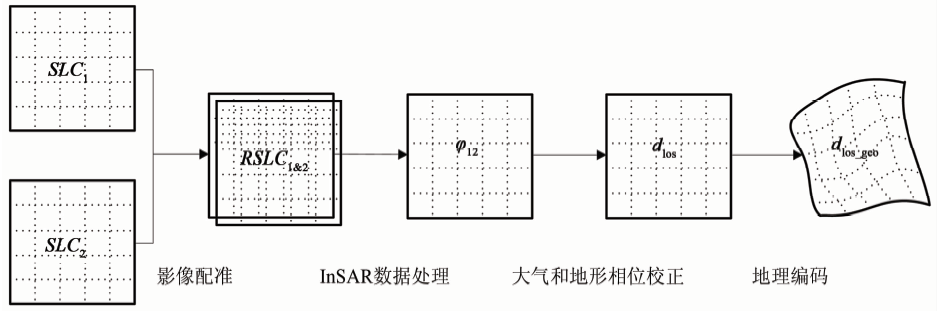 | 图2 地基InSAR形变测量数据处理流程(据文献[2]修改)Fig.2 Displacement process flow of GB InSAR |
1)GB InSAR影像配准。影像配准是GB InSAR形变测量的关键步骤之一, 是将2景影像中代表相同地物的像元匹配到同一位置。影像配准的步骤主要分为影像匹配、仿射变换和影像重采样等3步。如果影像间的像元位置没有发生较大变动, 一般来说, 配准过程能够高度自动化完成。地基雷达对同一目标区域进行重复观测时, 由于观测平台的微小偏移会使地基雷达观测轨道和观测视角发生微小改变, 造成影像在距离向和方位向发生一定的错位和扭曲, 因此, 非连续模式观测必须进行影像配准。而连续模式观测时由于轨道固定不动, GB InSAR通常无需进行影像配准。但对于长距离观测并且观测时间较长的情况, 由于某些影像获取期间大气的变化使得影像发生畸变, 因此部分影像也应进行校正补偿[3]。
2)GB InSAR干涉图和相干图生成。将配准后的干涉像对共轭相乘得到干涉图z1
由于连续模式观测的空间基线为0, 因此无需进行地形相位补偿; 非连续模式观测的空间基线不为0, 引入额外的地形相位时需要将干涉图中的地形相位消除。
3)相位解缠。相位解缠是干涉相位主值恢复至真实相位值的过程, 是GB InSAR形变测量的重要环节之一。目前的相位解缠算法通常需满足
式中: (i, j)和(k, l)表示相邻像元位置; φ disp_△ t为干涉像对获取时间间隔△ t内发生的缠绕形变相位。连续模式数据采集时间短, 目标的形变速率在2景GB InSAR影像获取的时间间隔△ t内, 一般能够满足|v|<
4)大气相位校正。解缠相位中包括形变相位、大气相位和噪声。噪声可以通过空间低通滤波削弱, 大气相位主要有3种方法予以消除: ①利用气象观测数据(温度、湿度和压力)确定大气相位; ②通过稳定点(地面控制点)估计大气相位; ③空间插值或滤波。
5)地理编码。为了解译观测数据以及与其他观测数据进行对比分析, 需要将雷达坐标系中的结果投影到地理坐标系下, 即获得主影像每一像元的三维位置矢量。
地基干涉测量雷达系统目前多采用Ku波段雷达波, 主要包括雷达传感器、能量供应单元、数据采集和存储单元以及数据处理模块等。按照成像方式的不同可分为2大类: 真实孔径雷达(real aperture radar, RAR)和合成孔径雷达(synthetic aperture radar, SAR)。商用型地基干涉测量雷达系统主要有: IBIS系列地基雷达系统(IDS, 意大利)[4]、GPRI便携式雷达干涉仪(GAMMA, 瑞士)[5]、FastGBSAR系统(MetaSensing, 荷兰)[6]、ARAMIS系统(ARELECS, 意大利)[7]、SSR系统(GroundProbe, 澳大利亚)[8]和S-SAR系统(中国安全生产科学研究院)[9]; 典型的科研型包括: LiSA[10]和MELISSA[11]系统(JRC, 欧盟委员会)、RiskSAR系统[12](UPC, 西班牙)、GB NW-SAR系统[13](IRPHE, 乌克兰)、ARCSAR系统[14](KNU, 韩国)、ASTRO系统[15](中国科学院电子学研究所, 中国)和超宽带轨道SAR系统[16](国防科技大学, 中国)。其中, GPRI便携式雷达干涉仪和SSR地基干涉测量雷达系统属于真实孔径雷达范畴。
按照雷达的工作体制划分主要包括: 步进频率连续波(stepped frequency continuous wave, SFCW)[4, 9, 10, 12, 16]、调频连续波(frequency modulation continuous wave, FMCW)[5, 6, 7]、噪声雷达[13, 14]以及多入多出技术(multiple input multiple output, MIMO)[11, 15]等雷达系统。地基干涉测量雷达系统研制初期, 由于矢量网络分析仪(vectorial network analyzer, VNA)无需复杂的电子元器件, 便可产生类似于SFCW的电磁波, 一些地基雷达传感器(如IBIS和LiSA)的核心通常采用VNA产生带通信号、检波和模拟数字转换。基于VNA的地基雷达系统是以连续波的形式发射离散的频率分量, 然后在时间域内重建电磁脉冲的波形合成一个等效脉冲, 因此单景影像的采集时间较长(最短几min)。较长的扫描时间增加了大气扰动的可能性, 同时由于扫描期间观测目标的不稳定也可能会导致影像幅度和相位的失真[17]。近几年来, 科研人员开始利用FMCW雷达(如FastGBSAR、ARAMIS)取代VNA, FMCW雷达, 这不但可以提高设备的可操作性, 而且能够减少数据采集时间(几s— 几十s), 降低观测成本。此外, 研究人员还将噪声雷达(如GB NW-SAR)和多入多出技术(如MELISSA)应用于地基雷达系统以获得更快的数据采集时间, 如MELISSA系统最短采集时间仅为0.26 s。相对于真实孔径雷达, 合成孔径雷达通过沿较长的轨道运动以获得较大的孔径, 目前除了几种最新的系统采用弧形扫描(如GB NW-SAR)以及无运动扫描(如MELISSA)外, 雷达传感器沿线性轨道滑动扫描是最常用的扫描方式。
GB InSAR技术按照数据获取方式的不同分为连续模式(continuous ground-based interferometric synthetic aperture radar, C-GB InSAR)和非连续模式(dis-continuous ground-based interferometric synthetic aperture radar, D-GB InSAR)2类[18]。连续模式观测通常将设备安装在观测现场, 根据需要合理配置雷达参数, 长时间持续采集数据(如每隔几分钟采集一次), 这种模式允许用户采用“ 近似实时” 监测目标区, 适宜观测快速形变现象(如每天几cm)。由于设备安装在固定观测站, 因此空间基线和地形相位皆为0。非连续模式观测通常需在观测区建立固定观测站, 根据形变的运动学特征设置一定的观测周期, 定期观测获取数据(如以周、月或年为周期), 非连续模式一般用来观测缓慢变形现象。连续模式和非连续模式2种类型的GB InSAR数据处理策略基本相同, 但非连续模式往往面临2个难点: 时间失相干和相位混叠现象, 观测点密度、监测精度以及形变测量的可靠性有所降低。
目前GB InSAR已在多个领域得到了广泛应用, 如露天采矿边坡[19]、滑坡[20] 、崩塌[21]、火山[22]、单体建(构)筑物[23]、水坝/堤坝[24]、冰川[25]等地物的变形测量。其中, GB InSAR在露天采矿边坡稳定性、水坝/堤坝形变、单体建(构)筑物结构变形等领域的应用最为广泛和成熟。由于这些目标物适宜于雷达波反射, GB InSAR获得的相干目标数量多, 其信噪比、相干系数和相位稳定性都较高, 能够探测到观测目标的局部微小变形, 为工程施工提供早期预警。对于单体建(构)筑物的结构变形监测, 关键是对每一观测像元进行精确的地理编码, 而地理编码精度取决于所用的DEM质量。因此, 通常采用激光雷达获取精确的地形数据, 或者利用GB InSAR得到同一区域的DEM, 但后者得到的DEM一般来说远不如激光雷达结果可靠。与露天采矿边坡监测相比, 崩塌、山体滑坡和火山等地质灾害涉及到边坡稳定性监测, 多数情况下观测区域植被较为茂密, 不利于雷达回波信号的接收, 这些观测区域的相干目标相对稀少, 有的区域甚至无法获得相干目标, 但提取的相干目标的测量精度依然可以达到毫米―亚毫米级。GB InSAR远距离、高时空采样能力, 也为冰川运动提供了一种新型监测工具, 利用GB InSAR观测冰川的应用限制主要归结于失相干问题: 一方面由于冰川存在积雪覆盖, 不利于雷达波反射, 观测期间如遇降雪也会影响观测效果; 另一方面对于SFCW 地基雷达系统的单景数据采集时间较长, 相对于冰川局部的移动速度, 几min采集时间内冰川局部已发生明显变化。因此, 对于移动较快的冰川监测适宜采用连续模式观测。
从数据处理层面上讲, 大多数GB InSAR系统采用Ku波段雷达系统, 这类系统的硬件性能易于实现, 可以获得高空间分辨率影像, 而且Ku波段对地物的微小变化比较敏感。但温度、湿度等外界观测条件的变化都可能会引起观测目标的微小形变, Ku波段的这种高形变敏感度也会带来数据处理上的额外负担, 在数据处理过程中, 如何消除环境变化引起的目标微小形变的影响至关重要[16]。GB InSAR在2次数据采集间隔大气条件的差异会产生额外的相位贡献也不容忽视, 研究人员已提出多种大气模型改进数据处理流程[12, 16, 17], 然而这些大气校正模型均是基于均一大气介质模型的假设, 对于非均一大气的影响, 目前还没有一种可靠的方案消除大气相位影响。另外, 波长越短失相干越严重, 影像失相干可能会使相位产生混叠现象, 增加了相位解缠的难度。在观测区域的某些部位, 采用连续观测模式观测失相干现象相对容易控制, 如果采用非连续观测模式, 这种失相干现象更为明显。为了提高相干性, 一种较为有效的方法就是采用较短的滑轨, 但这种做法势必会降低观测精度和空间分辨率。
1)零空间基线。地基雷达系统可以完全控制空间基线。对于连续观测模式形变监测来说, 空间基线为0, 零空间基线干涉测量无需DEM参与, 因此它是最理想的干涉测量形变获取方式。
2)轨道控制。由于观测设备位置固定, 因此干涉测量处理没有轨道误差。
3)时间采样率。地基雷达系统的最短数据采集间隔在亚s到几min之间, 而星载雷达的重访周期通常为几d— 几十d。高时间采样率在很大程度上简化了相位解缠, 甚至无需进行相位解缠。
4)入射角。根据监测目标的形变特征差异, 星载雷达和地基雷达各有自己的优势: 对于地面沉降观测, 星载雷达具有最佳视角; 而地基雷达更适合陡坡形变观测。
5)观测范围。星载雷达可以监测大范围区域, 而地基雷达只能监测几km2的区域。
6)测量精度。地基和星载InSAR的观测精度都取决于目标的散射特征以及与参考点的距离。GB InSAR的观测精度往往与设备和目标间的距离有关, 由于波长更短(如Ku波段), 监测精度一般在亚mm到几个mm之间。
本文简要讨论了地基合成孔径雷达干涉测量技术原理, 归纳了常规地基 InSAR形变测量的主要处理流程; 系统总结了地基干涉测量雷达系统的主要类型、发展趋势及地基合成孔径雷达干涉测量技术的主要应用领域, 比较了地基和星载InSAR在形变测量上的优势和不足。
1)地基干涉测量雷达系统经过十几a的研发, 核心传感器从原来的SFCW雷达发展到目前的FMCW雷达、噪声雷达、MIMO技术与FMCW雷达耦合技术, 数据采集频率由原来的几分钟缩短为几秒钟, 甚至亚秒级, 二维成像观测由“ 近似动态” 发展到了动态观测目标区的变形过程。设备可操作性和稳定性越来越高, 能在恶劣工作情况下持续观测; 观测方式更加灵活, 可根据研究区形变特征自由设计最佳观测方案, 能从多个角度观测和分析目标区的运动特征; 数据处理简单快速, 能在十几分钟内处理完几天的观测数据; 监测精度更高, 观测目标的微小变化在地基雷达测量结果中均有所反映。
2)地基合成孔径雷达干涉测量技术应用涵盖了露天采矿边坡、崩塌、山体滑坡、火山、桥梁等结构变形、坝体变形、冰川运动、区域数字高程模型(DEM)等十几个领域, 尤其是在露天边坡稳定性监测领域技术成熟, 能探测到边坡的局部极其微小的变形, 为工程施工提供早期预警。
3)相位解缠仍然是制约地基合成孔径雷达干涉测量技术的主要因素。由于采用短波长雷达波, 增加了相位解缠的难度。新型雷达传感器的应用能够有效提高数据采样率, 通过缩短数据采集时间间隔以降低形变梯度, 从而可以提高相位解缠的准确度。另外, 大气相位校正也是数据处理的一个难点, 目前尚无可靠的大气校正模型消除大气相位影响。
The authors have declared that no competing interests exist.
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
|
| [17] |
|
| [18] |
|
| [19] |
|
| [20] |
|
| [21] |
|
| [22] |
|
| [23] |
|
| [24] |
|
| [25] |
|