
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
SRTM(1″)DEM在流域水文分析中的适用性研究
[于海洋1, 2  , 罗玲
, 罗玲1 , 马慧慧1 , 李辉2 ]
, 罗玲|
|


第一作者: 于海洋(1978-),男,博士,主要从事遥感与GIS地学应用方面的研究。E-mail: 458722328@qq.com。
高精度的数字高程模型(digital elevation model,DEM)数据是流域水文分析应用的基础。美国地质调查局新发布了全球高分辨率数字高程数据产品,其空间分辨率为1″(约为30 m)。为评价该数据在流域水文分析中的适用性,以鹤壁汤河流域为实验区,以机载LiDAR DEM数据为参考,统计了SRTM(1″)数据的高程误差,分析了坡度、坡向、地表覆盖等对误差的影响; 在基于地形的水文分析中,统计分析了SRTM(1″)数据误差对地形湿度指数、坡度坡长因子以及汇流动力指数等地形指数计算的影响; 最后选取流域汇水区面积、最长水流路径长度、形状系数、弯曲度系数等流域特征参数对两种DEM数据提取结果进行了对比。研究表明SRTM(1″) DEM数据具有较高的精度,原始数据均方根误差为5.98 m,在消除平面位移误差后减小为4.32 m。基于地形的水文分析表明SRTM DEM与LiDAR DEM计算结果具有一定的差异,地形湿度指数平均值略高,坡度坡长因子和汇流动力指数平均值偏低,离散度偏小,这与SRTM DEM在微地貌以及高坡度地形区存在失真相关。两种DEM数据提取流域特征参数差异较小。上述研究表明SRTM DEM(1″)数据在流域水文分析中具有较大的应用潜力。
High-precision DEM data constitute the basis of watershed hydrology analysis. SRTM 1 Arc-Second Global elevation data, released by US Geological Survey, offer worldwide coverage data at a resolution of 1″ (30 m). In order to evaluate and analyze the potential watershed hydrologic applications of SRTM, the authors used Tanghe watershed in Hebi as the experimental area and airborne LiDAR DEM data as a reference to assess vertical accuracy of SRTM (1″) data and the impact of slope, aspect, land cover on errors of SRTM (1″). Hydrologic indexes based on the terrain, such as Topographic Wetness Index (TWI), Length Slope Factor (LSF) and Stream Power Index (SPI),were computed for analysis. Finally the basin’s characteristic parameters, such as catchment basin area, longest path length, shape factor, curvature coefficient, were extracted from the two DEM data and the results were compared. Studies show that SRTM (1″) DEM data have high precision, the RMSE of the original data is 5.98 m, and the RMSE of the data with the elimination of the plane displacement is reduced to 4.32 m. Hydrological analysis shows that SRTM DEM and LiDAR DEM produce some different results: the average of TWI of SRTM is slightly higher, the average of SLF and SPI is lower and the dispersion degree is smaller. This is associated with the terrain distortion of SRTM DEM in micro-topography and high slope area. The basin parameters extracted from both of the DEM data have smaller differences, which shows that SRTM DEM (1″) has wide application prospects in hydrologic analysis.
航天飞机雷达地形测量(shuttle radar topography mission, SRTM)计划的目的是对收集到的全部数据信息进行分析处理, 形成高精度的全球三维地图。该数据在国土资源各领域应用广泛[1, 2, 3, 4]。2014年9月24日美国地质调查局开始陆续公开发布了SRTM(1 ″)全球高程数据产品, 数据空间分辨率由原来的3″(约90 m)提升到1″(约30 m), 数据精度得到了大幅提升, 为流域水文特征提取与分析应用提供了新的数据源。为评价SRTM(1″)数据的精度以及在流域水文分析中的应用潜力, 本文以河南省鹤壁市汤河流域为实验区, 以机载LiDAR数据为参考数据, 分析了SRTM(1″)数据的高程误差以及坡度、坡向、地表覆盖等对误差的影响, 同时在流域水文信息提取的基础上, 计算了3种基于地形的水文指数及部分流域特征参数, 分析了SRTM(1″)数据误差对水文信息提取的影响。
研究选取河南省鹤壁市汤河上游流域作为研究对象。该流域位于鹤壁市鹤山区和山城区, 属海河流域卫河上游水系, 面积约 143 km2。研究区内地形复杂多样, 主要以低山丘陵为主, 中下游分布河流冲积平地。土地覆盖类型多样, 包括耕地、房屋建筑区、水体、草地、乔木林、灌木林、人工堆掘地等土地利用类型。复杂的地形和地表覆被有利于分析不同坡度、不同地表覆盖下SRTM数据特征及水文分析应用的影响。
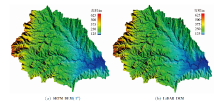
SRTM(1″)数据下载于美国地质调查局网站(http: //earthexplorer.usgs.gov/), 原始数据为地理坐标系, 网格大小为1″, 通过坐标转换将其重采样为30 m空间分辨率(图1(a))。机载LiDAR数据是采用Leica ALS50获取的, 数据获取日期为2009年4月21日。首先去除数据中的系统误差和粗差点, 通过点云滤波分类和插值建立数字地面模型DEM。点云数据获取密度0.65 p/m2, 垂直方向精度为0.15 m, 水平方向精度为0.6 m。LiDAR生成DEM原始分辨率为2 m, 为便于和SRTM(1″)数据对比分析, 通过计算邻域均值生成30 m分辨率DEM数据(图1(b))。由于SRTM DEM与LiDAR DEM数据获取时间相差近10 a, 期间地表人工堆掘地及建筑工地区域地形变化相对较大, 所以将在地表覆盖对SRTM误差的影响中进行分析, 其他区域变化量与SRTM DEM误差比较可以忽略。
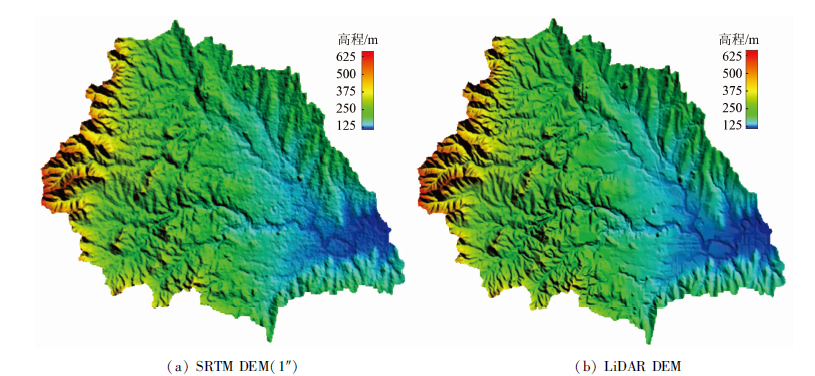 | 图1 DEM晕渲图Fig.1 Hillshade of the DEM |
地表覆盖数据来源于地理国情监测成果, 选取其中的耕地、房屋建筑区、水体、草地、乔木林、灌木林、人工堆掘地等土地利用类型, 进行合并处理并转换为30 m空间分辨率的栅格数据, 用于不同覆盖类型下SRTM DEM精度评价。
在SRTM DEM精度评价过程中, 以机载LiDAR获取DEM数据为准确值, 对研究区内SRTM DEM所有栅格点误差进行统计, 以保证误差分析不受采样点的影响。分别统计两种DEM数据的最大值、最小值、均值、标准差以及SRTM DEM相对于LiDAR DEM的均方根误差(root mean square error, RMSE), 分析坡度、坡向以及不同地表覆盖类型等对SRTM DEM数据误差的影响。
通过对地形湿度指数(topographic wetness index, TWI)、坡度坡长因子(length slope factor, LSF)、汇流动力指数(stream power index, SPI)等地形指数进行计算, 分析SRTM DEM数据误差对地形水文分析的不同影响。
2.2.1 地形湿度指数
地形湿度指数[5]是一种评价土壤水分空间分布的复合地形指数, 首先应用于Topmodel水文模型, 能够准确刻画地形对土壤水分饱和程度的影响, 对于计算径流饱和汇流面积具有重要意义, 在土壤水分空间分布与径流模拟研究中得到广泛应用。
地形湿度指数w可表示为汇水面积与局地坡度的比值的自然对数, 即
w=ln(As/tan β ) , (1)
式中, As为单元栅格的汇水面积(m2· m-1); β 为局地坡度(° )。
2.2.2 坡度坡长因子
坡度坡长因子是经验土壤侵蚀模型中表征地形对侵蚀影响的因子, 用来估算径流侵蚀潜力值, 该因子以22.13 m坡长和5° 坡度为参考, 建立的计算公式[6]为
LS=(n+1)
式中, n取值0.4, m取值1.3。
2.2.3 汇流动力指数
汇流动力指数[7]计算了径流对沉积物运移能力的空间分布。该参数适用于土壤流失评估, 能够更好的描述水流的聚合与辐散特征, 即
SPI=ln(Astan β ) 。 (3)
在两种DEM数据中, 选取相同的流域出口位置, 采用基于坡面流物理模拟分析的加权d8算法提取水系网络及流域范围[8]。选取流域汇水区面积、汇水区周长、最长水流路径长度、流域长度(汇水区外接最长矩形边长)、形状系数(流域长度与汇水面积比值)、弯曲度系数(最长径流长度与汇水面积比值)等流域特征参数对2种DEM数据提取结果进行对比分析。
已知LiDAR数据具有较高的精度(垂直方向精度为0.15 m, 水平方向精度为0.6 m), 因此以LiDAR DEM为准确值, 对流域汇水区内SRTM DEM所有栅格点误差进行统计。统计结果如表1所示。
| 表1 LiDAR DEM与SRTM DEM数据高程及坡度统计 Tab.1 Elevation and slope statistics of LiDAR DEM and SRTM DEM |
由表1可知, 研究区SRTM DEM与LiDAR DEM的最大值和最小值接近, 差值小于1.5 m; 均值相差2.32 m, 标准差差值较小, 说明SRTM DEM的精确度较高。坡度统计表明SRTM DEM在最大值、均值及标准差方面与LiDAR DEM对比均偏小, 差值较大, 说明SRTM DEM对于坡度较大的地形有一定的失真。从晕渲图(图1)对比来看, 在SRTM DEM数据中存在一定的噪声, 对于地形细节信息表达不如LiDAR DEM更清晰。
| 表2 SRTM DEM与LiDAR DEM 对比误差统计 Tab.2 Error statistics of the difference of LiDAR DEM and SRTM DEM(m) |
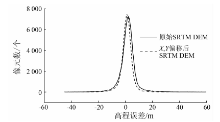
研究发现SRTM DEM与LiDAR DEM在X, Y方向存在明显的错位, 通过定位地形特征点计算可知X, Y方向位移分别为-48.28 m和38.36 m。表2为原始SRTM DEM与消除X, Y方向位移误差后RMSE统计对比, 其误差最大值、均值以及RMSE值均相应减小。SRTM DEM误差分布直方图(图2)中也可以发现在消除平面误差后, 高程误差在0值附近像元数量增加, 误差分布范围变小。
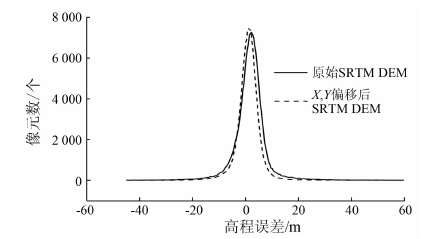 | 图2 SRTM DEM误差分布直方图Fig.2 Histogram of SRTM DEM error distribution |
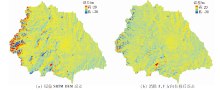
图3为消除X, Y方向位移误差前后SRTM DEM误差(ESRTM-ELiDAR)空间分布, 图中蓝色表示误差为负值, 红色表示误差为正值, 从图中可以明显看出原始SRTM数据误差分布与坡向明显相关。图4(a)误差分布与坡度相关性分析也证明了这一点, 对误差均值和RMSE按照8个坡向进行了统计, 可以看出原始数据误差均值与坡向具有明显的相关性, 在西北方向表现为负值, 在东南方向则相反, 平面误差消除后其误差均值分布与坡向的相关性明显减弱(图3(b)、图4(b))。
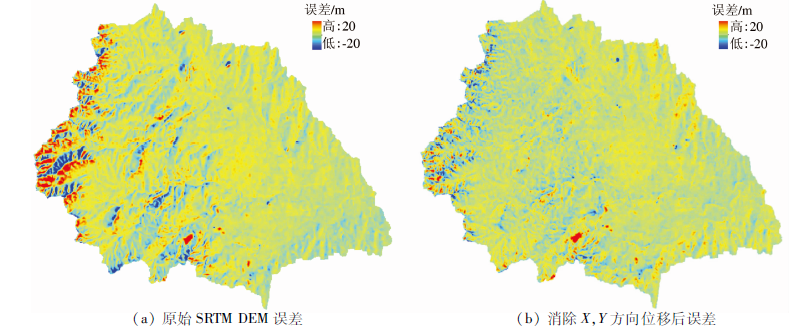 | 图3 SRTM DEM误差(ESRTM-ELiDAR)空间分布对比Fig.3 Spatial distribution of SRTM DEM error (ESRTM-ELiDAR) |
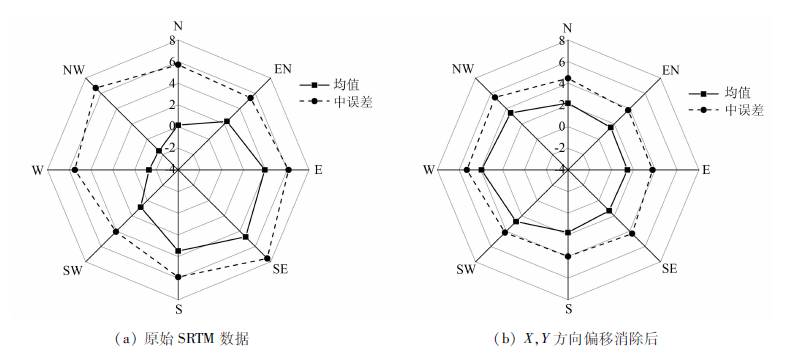 | 图4 误差均值和RMSE随坡向变化分布Fig.4 Mean error and RMSE distribution with aspect change |
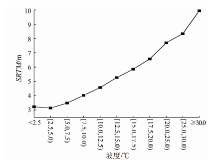
对不同坡度SRTM DEM误差均值和RMSE按照11个等级进行了统计(图5), 结果显示误差均值随坡度增加逐渐减小, 坡度较大时出现负值, 表明SRTM DEM数据在坡度较大区域高程值偏小; 误差标准差和RMSE统计值随坡度增大而增大, 说明SRTM DEM数据误差在坡度较大区域偏大, 这与其他相关研究结果较为一致。
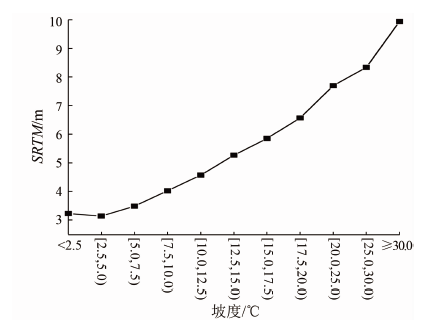 | 图5 不同坡度SRTM DEM RMSE变化Fig.5 RMSE of the SRTM DEM of different slopes |
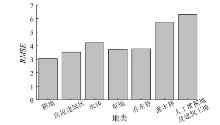
选取地理国情监测成果中的耕地、房屋建筑区、水体、草地、乔木林、灌木林、人工堆掘地等土地利用类型, 分别统计不同地表覆盖类型误差值, 统计结果见图6。其中耕地RMSE最小, 房屋建筑区、草地、乔木林较小, 其他从小到大依次为水体、灌木林、人工堆掘地及建筑工地等。耕地、房屋建筑区、草地区域地势平坦, RMSE较小。该区域乔木林主要分布在河道两侧的平地中, 其RMSE也较小, 而灌木林主要分布在坡度较大的山区, 误差大, 这说明SRTM数据中覆盖植被高度对误差的影响远小于坡度的影响。水体误差主要由于水位季节变化的影响。由于SRTM数据与LiDAR数据获取时间间隔接近10 a, 人工堆掘地及建筑工地等区域由于人为扰动影响, 地形差异较大。
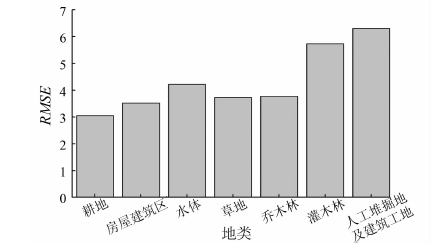 | 图6 不同地表覆盖SRTM DEM RMSE变化Fig.6 RMSE of the SRTM DEM of different land cover |
计算TWI, LSF, SPI等基于地形的水文指数, 以评价SRTM DEM误差对水文分析的潜在影响。这些复合地形指数具有明确的水文意义, 在Topmodel等水文模拟模型或水土流失评价作为重要参数应用广泛。上述地形水文指数最大值、最小值、均值、标准差等统计信息见表3。
| 表3 地形水文指数统计 Tab.3 Statistics of terrain hydrology index |
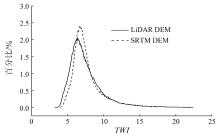
坡面水流的运动受到地形的控制, 因此TWI与土壤湿度的空间分布、径流汇水面积以及土壤侵蚀潜力等密切相关。统计值表明SRTM DEM获取TWI值分布区间及标准差小于LiDAR DEM, 均值略大于LiDAR DEM。在LiDAR DEM与SRTM DEM提取TWI直方图(图7)中可以看到SRTM提取TWI在峰值位置更加集中, 离散度小, 在低值区和高值区分布频率低于LiDAR DEM, 说明SRTM DEM与同分辨率的LiDAR DEM比较, 在地形细节变化方面表现略差, 整体获取地形湿度值略高。
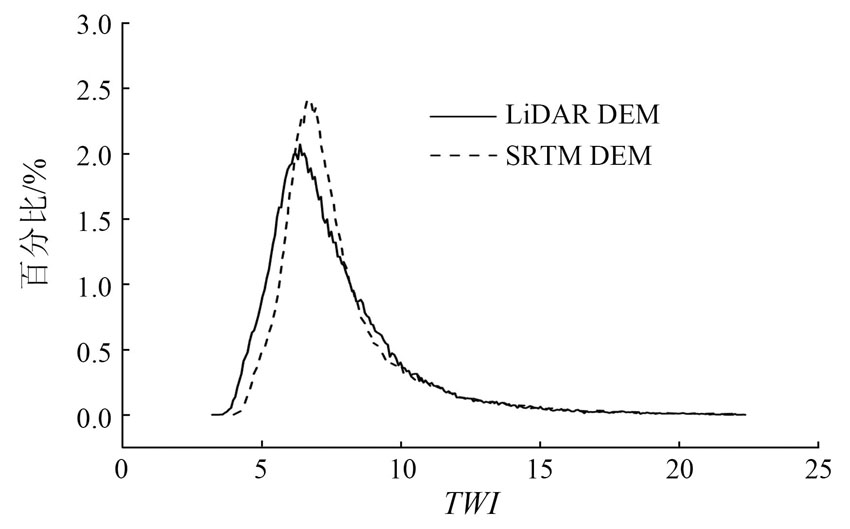 | 图7 LiDAR DEM与SRTM DEM提取TWI直方图曲线Fig.7 TWI histogram curve of LiDAR DEM and SRTM DEM |
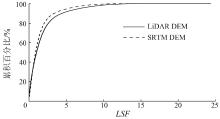
LSF统计值表明SRTM DEM最大值、均值、标准差均明显小于LiDAR DEM, 累积分布曲线(图8)显示SRTM DEM提取LSF值离散度小于LiDAR DEM, 分布偏向低值区, 表明SRTM DEM提取LSF参数描述土壤侵蚀潜力值小于LiDAR DEM, 原因与SRTM DEM坡度值偏小相关。
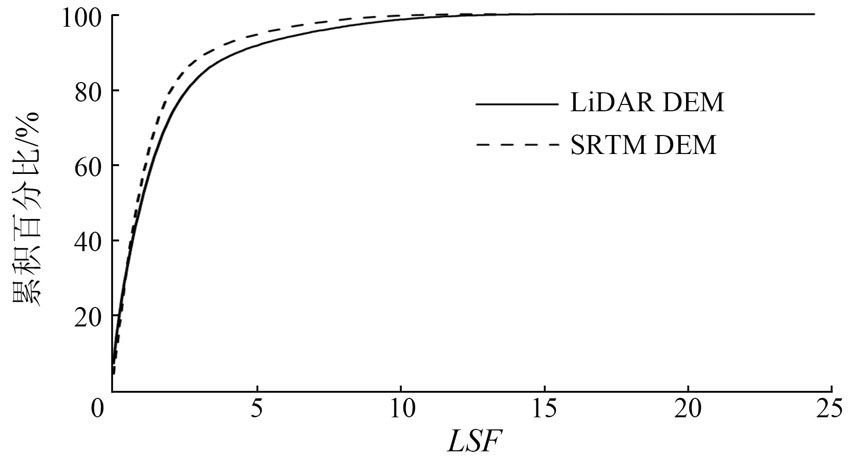 | 图8 LiDAR与SRTM DEM提取LSF累积分布曲线Fig.8 LSF cumulative distribution curve of LiDAR DEM and SRTM DEM |
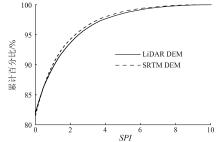
SPI是对径流沉积物运移能力的空间描述, SRTM DEM计算结果均值、最大值和标准差均小于LiDAR计算结果。直方图显示SRTM DEM计算值在峰值位置更加集中, 累积分布曲线(图9)略偏向低值区, 说明SRTM DEM计算SPI与LSF近似, 对径流沉积物运移能力的描述要小于LiDAR DEM, 但差异较小。
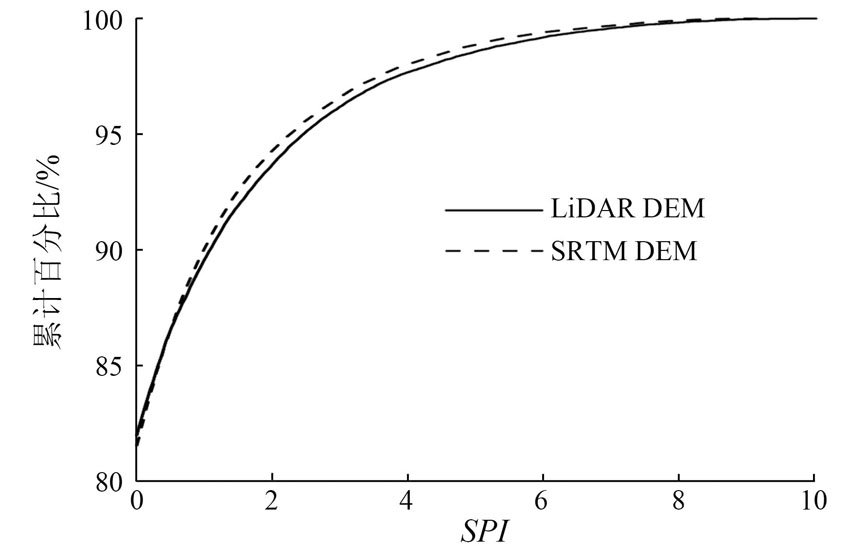 | 图9 LiDAR与SRTM DEM提取SPI累积分布曲线Fig.9 SPI cumulative distribution curve of LiDAR DEM and SRTM DEM |
在2种数据流域水文分析过程中采用了相同的算法和参数, 提取结果显示2种DEM数据提取结果较为接近, 提取流域范围及水系网络差别较小。流域部分特征参数如表4所示, 统计表明2种数据获取流域特征参数差异较小, 显示了SRTM DEM数据的水文分析应用的潜力。但SRTM DEM提取各个参数均略小于LiDAR DEM, 尤其是最长水流路径差异明显, 与LiDAR数据中地形更加详尽、微地貌信息更为丰富有关。
| 表4 流域特征参数统计 Tab.4 Statistics of watershed characteristics parameters |
1)本文以河南省鹤壁市汤河上游流域为实验区, 以机载LiDAR DEM数据为参考, 对SRTM DEM (1″)数据的精度以及在流域水文特征提取分析中应用的潜力进行了评价。研究表明SRTM DEM (1″)数据具有较高的精度, 原始数据RMSE为5.98 m, 在消除平面系统位移误差后减小为4.32 m。
2)原始数据误差与坡向高相关性与存在平面系统位移误差有关, 在消除平面系统位移误差后, 误差与坡向相关性减小。SRTM DEM与坡度存在较高的相关性, 坡度越大, 误差越大。地表覆盖对SRTM误差的影响与地形相关, 分布在地形平坦区的耕地、草地等类型误差小, 灌木林等分布在坡度较大的山区, 误差较大。
3)基于地形的水文分析表明, SRTM DEM与LiDAR DEM计算结果具有一定的差异, SRTM DEM与同分辨率的LiDAR DEM比较, TWI平均值略高, SPI与LSF较小, 离散度偏小, 这与SRTM DEM在微地貌以及高坡度地形区存在失真有关。两种DEM数据提取流域面积、长度、形状系数、弯曲度系数等特征参数差异较小。上述研究表明SRTM DEM(1″)具有较高的水文分析应用潜力。
The authors have declared that no competing interests exist.
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|