
0 引言
随着信息产业的日益发展以及信息技术的不断提高,人类与地理信息技术联系越来越紧密。对地理信息准确、高效的获取成了众多信息学科工作者们共同的研究目标。空间数据的人工采集与人工目视判读等方式已经不适合当今的发展趋势,也难以满足人们的需求。如今,摄影测量与遥感技术和计算机视觉技术能够完成大批量地理空间数据的采集与处理分析,能够为当今的城市发展提供强有力的支持。从遥感影像数据中提取兴趣目标是遥感领域的重要任务,而道路提取则可为城镇发展建设需要提供服务。
道路在地理信息中占有重要地位,与交通、城市规划、应急响应等行业有密切联系。道路的识别与提取研究一直是近20 a来的一个重要研究课题,从城市地区中提取道路网更是尚未解决的难题。目前,在中低空间分辨率遥感影像中提取郊区道路已有不少可靠稳健的算法策略,但是,这些地区地物简单,场景简单,而且道路多呈线状; 而在高空间分辨率城镇影像中,地物种类多样,背景复杂,道路呈面状,路面还受道路线、车流、行人等因素的干扰,并且道路形状、种类多变,易受周围地物的干扰、遮挡,致使道路特征变化复杂,产生“同物异谱”、“异物同谱”的现象[1]。常见的道路提取难点包括以下几个方面: ①影像空间分辨率高,纹理特征复杂,影像噪声大; ②路面、周围高大地物阴影及车流遮挡; ③不同等级道路差异大,路面材质与道路宽度变化大; ④非道路条带状地物的干扰; ⑤道路拓扑关系复杂; ⑥道路连接方式多样,包括十字路口、丁字路口和高架桥等。
通常,道路提取工作依据如下5种主要特征[2]: ①几何特征。在高空间分辨率遥感影像中,道路表现为具有一定长度的带状目标,其边缘与中心线都具有明显的线状几何特征。道路的长度远大于其宽度,故长宽比非常大。通常道路的曲率变化很小,边界平滑。沿着道路方向,宽度变化也较小,一般道路的宽度不会突然剧烈变化,而在道路交叉处宽度变化则较大。②辐射特征。道路内部灰度变化均匀,且与其周边地区灰度反差较大,道路一般表现为黑、白、灰的颜色特征,但会受路面上的车辆、道路线和行人等因素的影响。③拓扑特征。道路存在的意义决定了它的拓扑特征。道路间一般是相互连通的,且不会突然中断,各部分道路会整体形成一个连通域,组成路网。④功能特征。道路与人类的生产生活密切相关,所以道路一般都有通达的目的地,会与村庄、城镇等居民地或人工设施相连接。⑤上下文特征。通常指与道路相关的地物所具有的特征信息,包括了局部上下文信息和全局上下文信息,如电线杆、建筑物、行道树、立交桥、高大地物的阴影、路面上的汽车、路中央的隔离带、交通管理线等。高空间分辨率影像中存在许多不同种类的上下文特征,可以被合理地用于提取道路。
本文将综合利用道路的辐射特征(道路的灰度信息)、拓扑特征(道路相互连接的特性)以及上下文特征(道路与背景的模型信息)进行有效的道路提取。
1 马尔科夫随机场影像分割
1.1 影像分割
本文将以马尔科夫随机场影像分割
影像是一个以灰度为值的数组
一个用来描述前景,一个用来描述背景。灰度直方图直接通过相应的影像获得。灰度直方图被规范化,其和为1,即
影像分割则是通过z以及
1.2 基于能量优化的影像分割
定义能量函数E,通过求能量函数的最小值来求取最优的影像分割,该能量函数由以下几个方面进行引导: 前景与背景灰度直方图,以及不同透明度的统一性,即同一个目标应该具有相同的不透明度。以上几点可通过Gibbs能量形式表达为
式中: 数据项U为在给定灰度直方图
式中: 符号
式中
至此,能量模型就被完全定义了,影像分割可以通过求全局能量最小值获得,即
整体优化求解通过标准的最小割算法获得。
对于包含道路的影像,通过上述的硬分割方式,将道路与非道路划分开。由于直接通过灰度直方图估计影像前景和背景模型在效率和算法稳定性方面存在欠缺,本文将使用高斯混合模型来估计前景和背景区域的影像模型,然后利用此模型对各像素区域的数据项进行估计。
1.3 颜色建模
高斯混合模型是较为有效、稳定,且对颜色空间表征具有一定抽象性的模型[15],对彩色影像建模具有较强的适应性。对于包含道路的影像,用一个高斯混合模型表征前景,即道路区域; 用另一个高斯混合模型表征背景,即非道路区域。每个高斯混合模型都由T个成分构成。在此,定义额外的向量
由此,Gibbs能量函数变成
式中K为选择的高斯混合模型的成分编号。U现在定义为
其中,
式中: 函数p(.)为高斯概率分布;
因此,模型的参数现在变为
对于平滑项V,基本保持不变,仅将对比项改为颜色空间的欧氏距离,即
式中
式中: mean为取平均值; m和n为邻接像素索引。
1.4 迭代求解能量最小值
根据上述得到的与道路局部区域分割等价的能量函数模型,利用最小割、最大流算法[16]迭代求解获取较优的解。首先,设置初始的前景、背景局部区域,标记部分像素隶属类别
1)用户给定局部初始前景、背景标记
2)初始化前景与背景高斯混合模型θ。
3)对所有待标记像素进行高斯混合模型的成分赋值,即
4)根据影像数据z,更新高斯混合模型参数,即
5)估计分割,即更新隶属标记
6)重复步骤3)―步骤5),直到能量收敛。
其中步骤1)—步骤2)为初始化,步骤3)—步骤6)为迭代优化。
2 增量式分割道路提取
2.1 局部有效区域中的道路提取
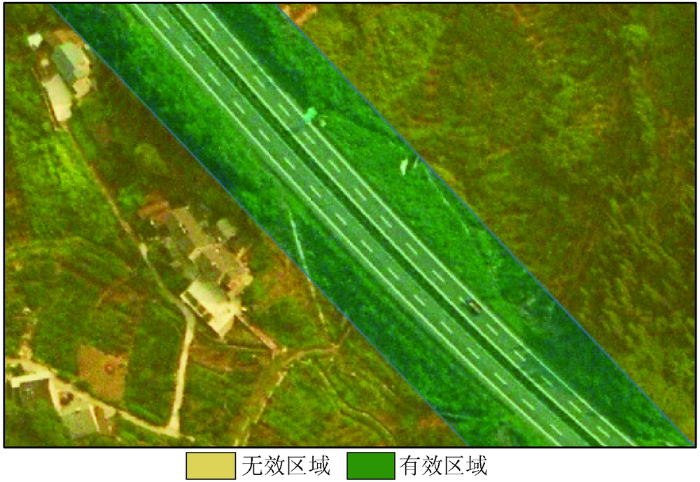
在高空间分辨率遥感影像中,道路要素的分布与草地、林区和城镇建筑具有明显区别。道路通常贯穿于整个遥感影像,并在影像中仅占有部分区域,其功能特征直接导致道路分布十分分散。对于马尔科夫随机场框架下的道路分割,只有在局部进行道路提取才能获得鲁棒的道路模型; 如果在影像全部区域中进行道路模型的训练与估计,则很有可能使道路分割出现明显错误。由于路面仅与邻近道路的背景具有相关性,离道路较远的背景区域对局部道路提取并无益处; 相反,由于高空间分辨率遥感影像中“异物同谱”、“同物异谱”现象的干扰,冗余的背景反而会对马尔科夫随机场模型中的数据项U的估计产生干扰,致使前景模型和背景模型混淆。如图1所示,绿色区域为马尔科夫随机场模型的建立范围,黄色区域为无效区域。增量式分割道路提取仅考虑局部有效区域。因此,本文通过增量式道路分割提取策略对所提取的有效区域进行划分,并从有效区域中提取道路区域。
图1
2.2 增量式道路分割提取
道路相比其他地物具有独特的拓扑特征,道路路面彼此相连,相邻的道路间具有灰度、纹理、几何特征方面的正相关性; 同样,相邻的背景间也具有高度正相关的灰度、纹理特征。在连续道路空间中,利用邻接已知道路与非道路区域,提取道路特征,可有效地对相邻区域的像素类别隶属变量
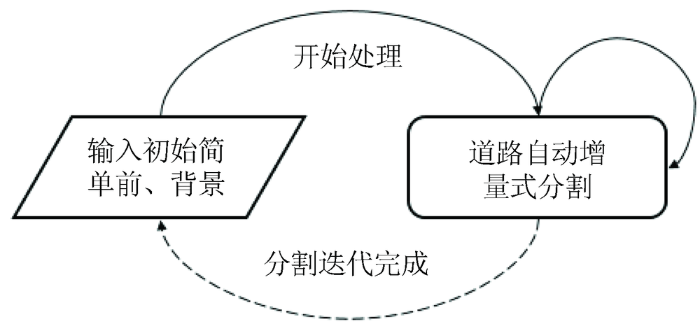
道路增量式提取流程如图2所示。
图2
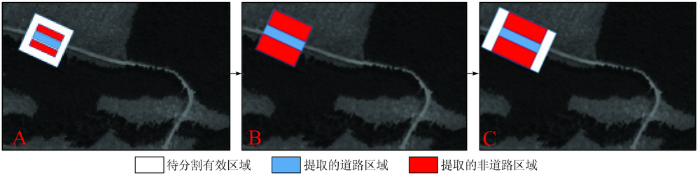
图2中,白色为待分割有效区域
图3
3 实验与分析
本文实验数据为高空间分辨率RGB波段遥感影像和全色遥感影像,道路宽度范围在8~30个像素之间,主要为无过多遮挡的城际道路与乡村道路。
实验参数设置如下: 马尔科夫随机场模型中,采用8邻接像素邻接关系; 对于
3.1 设置初值
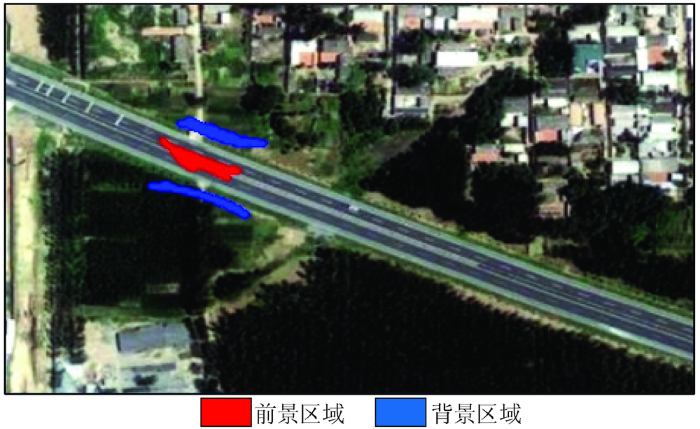
本实验由人工设置初值,初值设置非常简单,仅需要标记局部道路的部分像素与该像素附近的部分非道路区域即可。如图4所示,红色为前景道路标记区,蓝色为背景非道路标记区。若提供部分道路矢量,可利用已有矢量自动设置前景和背景初值。
图4
3.2 增量式马尔科夫随机场分割
图5

图6
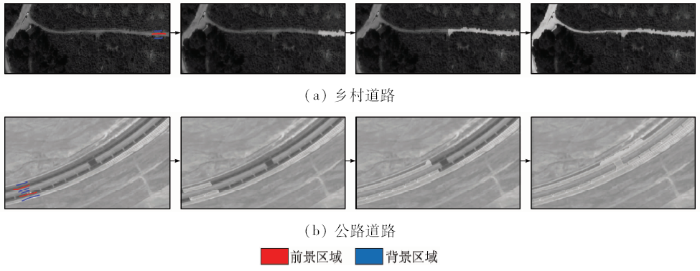
图6
全色影像中乡村道路与公路道路增量式提取示例
Fig.6
Example of incremental road extraction from rural area and highway in panchromatic image
3.3 实验结果评价与分析
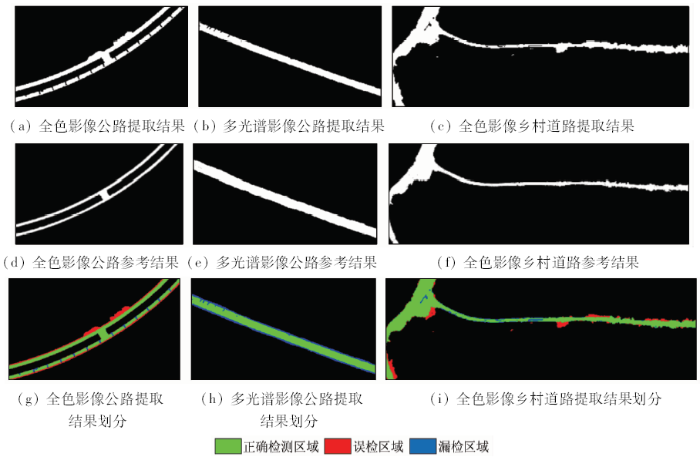
在本文的实验中,分别对全色影像公路、多光谱影像公路以及全色影像乡村道路进行提取实验。实验中发现,不论对单条道路还是平行并排道路,本文算法均有效,克服了传统追踪方法只能对单一道路追踪的弱点。同时,该算法能适应道路变化的情况,对复杂道路情况的适应性好。像素级精度评价结果如图7所示。
图7
采用F-Beta测度
式中: Precision为精确率; Recall为召回率; β为参数,本文中取
对全色影像公路、多光谱影像公路与全色影像乡村道路分别另选20段区域进行像素级道路分割精度评估(表1),以各影像精度指标平均值作为最终统计量。
表1 道路提取结果评估
Tab.1
| 道路类型 | 精确率 | 召回率 | F-Beta测度 |
|---|---|---|---|
| 全色影像公路 | 0.92 | 0.74 | 0.87 |
| 多光谱影像公路 | 0.84 | 0.95 | 0.87 |
| 全色影像乡村道路 | 0.71 | 0.90 | 0.75 |
图8
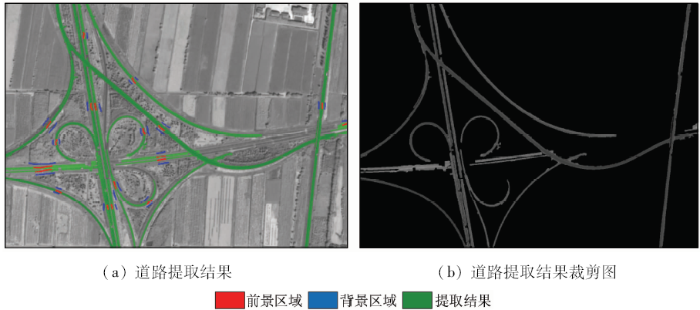
图8
一个更加复杂场景的高空间分辨率遥感影像道路提取结果
Fig.8
Road extraction result from a more complex scene
4 结论
1)本文提出了一种基于增量式马尔科夫随机场分割的高空间分辨率遥感影像道路提取方法。利用基于RBG波段的高斯混合模型对道路影像前景和背景建模,在马尔科夫随机场模型框架中进行优化,完成对道路区域的分割; 并利用分割前景区域膨胀的方法增量式确定道路提取有效区域,仅在有效区域内完成道路提取,以剔除对于道路提取冗余无效的干扰区域的影响,实现道路区域的精确分割。
2)实验结果表明,所提方法对于前景和背景具有一定灰度差异地区的道路提取效果显著,并且彩色影像在颜色空间比全色影像具有更高的前景、背景模型区分度和更高的道路提取精度。
3)该算法对于平行道路和变宽道路提取适应性强,能够有效应对城际公路与乡村道路提取; 但对于边界模糊的影像区域,道路边界提取仍存在误差。后续研究可通过向分割模型中引入纹理信息并结合道路的几何结构特征,更精确地提取道路。
参考文献
Machine learning based road detection from high resolution imagery
[J].
DOI:10.5194/isprs-archives-XLI-B3-891-2016
URL
[本文引用: 1]

At present, remote sensing technology is the best weapon to get information from the earth surface, and it is very useful in geo- information updating and related applications. Extracting road from remote sensing images is one of the biggest demand of rapid city development, therefore, it becomes a hot issue. Roads in high-resolution images are more complex, patterns of roads vary a lot, which becomes obstacles for road extraction. In this paper, a machine learning based strategy is presented. The strategy overall uses the geometry features, radiation features, topology features and texture features. In high resolution remote sensing images, the images cover a great scale of landscape, thus, the speed of extracting roads is slow. So, roads' ROIs are firstly detected by using Houghline detection and buffering method to narrow down the detecting area. As roads in high resolution images are normally in ribbon shape, mean-shift and watershed segmentation methods are used to extract road segments. Then, Real Adaboost supervised machine learning algorithm is used to pick out segments that contain roads' pattern. At last, geometric shape analysis and morphology methods are used to prune and restore the whole roads' area and to detect the centerline of roads.
Road Tracing by Profile Matching and Kaiman Filtering
[M] //Gruen A,Kuebler O,Agouris P.
Automatic road extraction from high resolution satellite image using adaptive global thresholding and morphological operations
[J].DOI:10.1007/s12524-012-0241-4 URL [本文引用: 1]
Semi-automatic road centerline extraction in high-resolution SAR images based on circular template matching
[C]//
Road extraction from remote sensing imagery based on road tracking and ribbon snake
[C]//
Connected component-based technique for automatic extraction of road centerline in high resolution satellite images
[J].DOI:10.1186/s13640-015-0062-9 URL [本文引用: 1]
Road extraction using SVM and image segmentation
[J].
DOI:10.14358/PERS.70.12.1365
URL
[本文引用: 1]
In this paper, a unique approach for road extraction utilizing pixel spectral information for classification and image segmentation-derived object features was developed. In this approach, road extraction was performed in two steps. In the first step, support vector machine (SVM) was employed merely to classify the image into two groups of categories: a road group and a non-road group. For this classification, support vector machine (SVM) achieved higher accuracy than Gaussian maximum likelihood (GML). In the second step, the road group image was segmented into geometrically homogeneous objects using a region growing technique based on a similarity criterion, with higher weighting on shape factors over spectral criteria. A simple thresholding on the shape index and density features derived from these objects was performed to extract road features, which were further processed by thinning and vectorization to obtain rood centerlines. The experiment showed the proposed approach worked well with images comprised by both rural and urban area features.
Road network extraction using edge detection and spatial voting
[C]//
Automatic road extraction from aerial images by probabilistic contour tracking
[C]//
Improving urban road extraction in high-resolution images exploiting directional filtering,perceptual grouping,and simple topological concepts
[J].DOI:10.1109/LGRS.2006.873875 URL [本文引用: 1]
Extraction of main urban roads from high resolution satellite images by machine learning
[C]//
Hierarchical object oriented classification using very high resolution imagery and LiDAR data over urban areas
[J].DOI:10.1016/j.asr.2008.11.008 URL [本文引用: 1]
Road extraction in rural and urban areas
[J].ABSTRACT An approach for automatic road extraction from digital aerial imagery is presented. The extraction is based on a semantic model for roads. The images are divided into different so-called "global contexts": rural, forest, and urban. Different parts of the road model and different strategies are used in the different global contexts. In rural areas, a multi-scale approach is employed to find initial hypotheses for roadsides, which are then grouped into road segments using local context knowledge. In urban areas, road markings and DEM information are used to extract road segments. In addition to the local grouping, road segments are selected and linked into a global road network. An external evaluation shows the high quality of the results that are obtainable automatically with the proposed approach. 1 INTRODUCTION In the past, the automation of road extraction from digital imagery has received considerable attention. Research on this issue is often motivated by the increasing importanc...
Interactive graph cuts for optimal boundary & region segmentation of objects in N-D images
[C]//
Alpha estimation in natural images
[C]//
An efficient heuristic procedure for partitioning graphs
[J].DOI:10.1002/bltj.1970.49.issue-2 URL [本文引用: 1]
Frequency-tuned salient region detection
[C]//
Global contrast based salient region detection
[J].
DOI:10.1109/TPAMI.2014.2345401
URL
PMID:26353262
Automatic estimation of salient object regions across images, without any prior assumption or knowledge of the contents of the corresponding scenes, enhances many computer vision and computer graphics applications. We introduce a regional contrast based salient object detection algorithm, which simultaneously evaluates global contrast differences and spatial weighted coherence scores. The proposed algorithm is simple, efficient, naturally multi-scale, and produces full-resolution, high-quality saliency maps. These saliency maps are further used to initialize a novel iterative version of GrabCut, namely SaliencyCut, for high quality unsupervised salient object segmentation. We extensively evaluated our algorithm using traditional salient object detection datasets, as well as a more challenging Internet image dataset. Our experimental results demonstrate that our algorithm consistently outperforms 15 existing salient object detection and segmentation methods, yielding higher precision and better recall rates. We also show that our algorithm can be used to efficiently extract salient object masks from Internet images, enabling effective sketch-based image retrieval (SBIR) via simple shape comparisons. Despite such noisy internet images, where the saliency regions are ambiguous, our saliency guided image retrieval achieves a superior retrieval rate compared with state-of-the-art SBIR methods, and additionally provides important target object region information.
GrabCut in one cut
[C]//
DenseCut:densely connected CRFs for realtime grabCut
[J].
DOI:10.1111/cgf.12758
URL
Abstract Figure-ground segmentation from bounding box input, provided either automatically or manually, has been extremely popular in the last decade and influenced various applications. A lot of research has focused on high-quality segmentation, using complex formulations which often lead to slow techniques, and often hamper practical usage. In this paper we demonstrate a very fast segmentation technique which still achieves very high quality results. We propose to replace the time consuming iterative refinement of global colour models in traditional GrabCut formulation by a densely connected crf . To motivate this decision, we show that a dense crf implicitly models unnormalized global colour models for foreground and background. Such relationship provides insightful analysis to bridge between dense crf and GrabCut functional. We extensively evaluate our algorithm using two famous benchmarks. Our experimental results demonstrated that the proposed algorithm achieves an order of magnitude (10脳) speed-up with respect to the closest competitor, and at the same time achieves a considerably higher accuracy.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}