

0 引言
随着遥感技术和计算机技术的发展,遥感影像富含的海量信息得到越来越多的重视,应用的意义随之增大。其中道路信息对智能交通、智慧城市乃至智慧地球的建设具有重要作用。然而由于地物的复杂性,精准识别提取道路信息成为当前研究的重要课题。
目前,道路的提取方法大致可以分为基于区域的提取方法和基于边缘的提取方法2类。基于区域的提取方法主要是在“区域”(即在某种标准方面(如光谱信息、纹理信息等)相一致且位置上相邻的像素群)上,根据区域的某些特征(如面积特征、周长特征等)来完成影像的分类和目标的识别[1,2]。该方法的提取效果很大程度上受标准选择的影响,对人员先验知识的要求较高。基于边缘的提取方法主要基于影像梯度在边缘上的变化特性进行道路的提取[3,4,5]。然而高空间分辨遥感影像所蕴含的丰富地物信息会对边缘的判断造成较大的混淆,并且由于传感器和天气环境的影响,成像时会产生一定的噪声,这给应用传统光学影像边缘检测方法进行道路信息提取增加了难度。
针对基于边缘的道路提取方法所存在的问题,本文提出了一种基于Canny边缘检测思想的改进遥感影像道路边缘提取方法。首先,采用一种结合中值滤波与自适应高斯滤波的方法替换传统Canny边缘检测方法的平滑强度固定的高斯滤波方法来对影像进行降噪; 然后,在经过Canny算法的梯度求取以及固定常数的双阈值边缘判断部分,通过对粗略边缘影像像素点的局部特性进行分析,来自适应地选择高、低阈值判断是否为边缘点,以期在道路提取中抑制噪声的干扰、保留边缘细节,并有效解决遥感影像丰富地物中梯度变化较小的边缘误判问题,从而提高道路提取的完整性和准确度,为地理信息系统提供准确的基础地理信息。
1 Canny边缘检测方法
用于图像边缘检测的方法有很多,常用的边缘检测算子有Sobel,Log,Prewitt和Roberts等。这些算法的实现较为简单,检测较快,但是易受噪声干扰,如果将其应用于遥感影像边缘检测中将会出现干扰边缘多、边缘不连续或者道路细节丢失等情况。
基于最优化思想的Canny边缘检测方法可以弥补其他梯度算子的不足,被认为是最成功也是应用最广泛的灰度边缘检测方法。本文在遥感影像边缘检测中借鉴Canny方法的实现思想,依照Canny方法的检测步骤完成边缘的提取。
Canny方法在实现上主要有4个步骤[6]:
1)平滑影像降噪。采用高斯函数G(x,y)对影像
式中σ为平滑尺度参数。
2)计算梯度幅值和方向。选用合适的梯度算子计算降噪后影像各像素点的梯度大小和方向。
3)非极大值抑制(non-maximum suppression,NMS)。为了准确地定位边缘点位置,对各像素点的梯度值采取非极大值的抑制手段。在当前像素点的邻域内,通过比较该点的梯度幅值,若大于沿梯度方向上相邻2个像素点灰度值的梯度幅值,那么判断该点是可能的边缘点; 否则判断该点为非边缘点。
4)高、低阈值检测与边缘连接。通过上述步骤处理后得到的边缘只是粗略的边缘,还要将其经过高、低阈值的检测处理来剔除伪边缘点。将小于低阈值的点排除,大于高阈值的点确定为边缘点; 若介于两者之间则标记为弱边缘点,再判断此弱边缘点与边缘点是否相连接,若是,则将此点记为边缘点。
2 影像滤波降噪
遥感影像在采集、转换和传送等过程中易因仪器和外界环境而产生噪声,因此在进行遥感影像边缘检测和道路提取前,需要采用适当的方法来减少噪声。但是平滑降噪的同时容易模糊原影像,使遥感影像的边缘细节保留能力降低。为此,本文采用一种能降噪又能较好地保留边缘细节的基于目标尺度的自适应高斯滤波器替换传统Canny方法中的高斯滤波器,在高斯滤波前先使用中值滤波来平滑因地物信息增加造成的较多椒盐噪声,然后再求得各像素点的目标尺度并与高斯函数结合,针对不同像素点来自适应地改变平滑强度进行滤波降噪。
2.1 中值滤波
中值滤波是一种依据排序理论的非线性滤波方式。通过将中心像素点邻域里的所有像素的灰度值按大小顺序排列,再用这些像素灰度值的中值来代替该中心像素点的灰度值。通过中值滤波能够去除较大的孤立噪声点。
2.2 目标尺度
式中
图1为
图1
点
式中:
式中
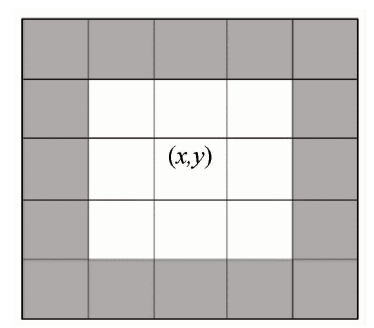
对于影像中的像素点,其目标尺度Rxy为
式中
求取目标尺度
1)设置初始条件,包括初始目标像素点
2)根据式(5)计算像素点
3)若
4)重复执行步骤2)和步骤3),直到各像素点遍历截止。
2.3 自适应目标尺度平滑滤波
通过引入目标尺度自适应改变平滑尺度
式中:
3 双阈值选取方法
经过降噪处理、梯度求取以及NMS后得到的是粗略边缘影像,还要进一步根据高、低阈值来判断粗略边缘上的点是否为边缘点。高、低阈值的设置直接关系到边缘检测的精度,是边缘提取的关键。若阈值太高则可能导致边缘线的破裂,若阈值太低则会容易将噪声和梯度变化较小的边界误判为影像边缘。而合适的阈值不但能够抑制噪声,而且还能减少伪边缘的产生。
由于遥感影像受光照、场景等变化因素的影响,在某一部分分割效果良好的阈值在其他部分的效果不一定就好。高、低阈值的取值无法是一个确定不变的值,因此,本文采用以随位置变化的函数值作为灰度阈值的自适应阈值方法。
除非目标有明显的边界,否则灰度阈值的大小对分割目标的边界定位和整体尺寸有很大的影响,这意味着尺寸(特别是面积)的测量对于灰度阈值的选取很敏感[10],合适的面积尺寸范围亦成为选取阈值的重要因素,对阈值的准确、客观的选取具有重要意义。跟据上文目标尺度的定义,若某像素点的目标尺度为
基于上述讨论,本文提出了一种基于目标尺度的局部统计特性的双阈值选取方法:
1)对于影像中每一像素点
2)在该点的
式中:
从而对于不同的点有不同的阈值来进行边缘判断和边缘连接。高于高阈值
4 实验结果及分析
为了验证本文方法效果,在Matlab2016平台下将本文方法与传统Canny方法以及结合Otsu算法选取阈值的Otsu-Canny方法进行仿真实验对比,实验影像为2幅空间分辨率为0.61 m的QuickBird全色波段遥感影像。具体实验内容包括: ①定性分析,将原始影像和添加噪声的影像分别进行实验得到边缘检测结果图,从视觉上直观地比较检测结果及算法抗噪性; ②定量分析,采用评价指标来进行客观的边缘检测效果评价; ③引入形状特征参数完成道路边缘提取的精细化处理并进行结果精度评价。
4.1定性分析
图2
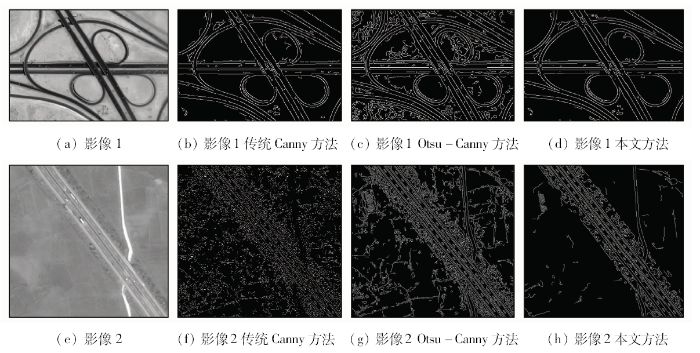
图3为高斯噪声标准差为10和椒盐噪声密度0.05%的遥感影像的边缘检测结果。从结果图可以明显看出,前2种方法去噪能力差、受干扰影响较大,检测到轮廓线较为零散,且误判多、产生了许多虚假边缘。而本文算法受噪声干扰非常小,边缘判断准确、边缘轮廓清晰,线段平滑、连续性好。
图3
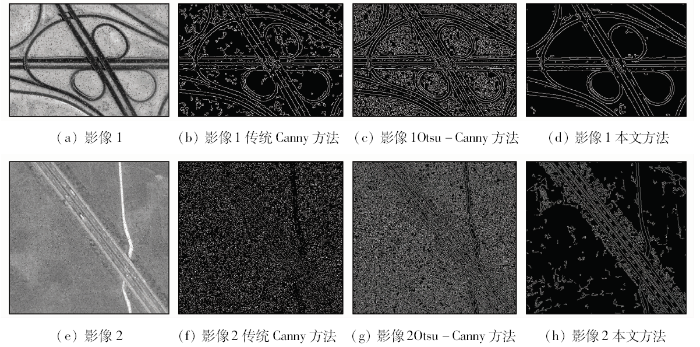
图3
标准差10高斯噪声和椒盐噪声0.05%影像检测结果
Fig.3
Contrast of image with Gauss noise and salt and pepper noise
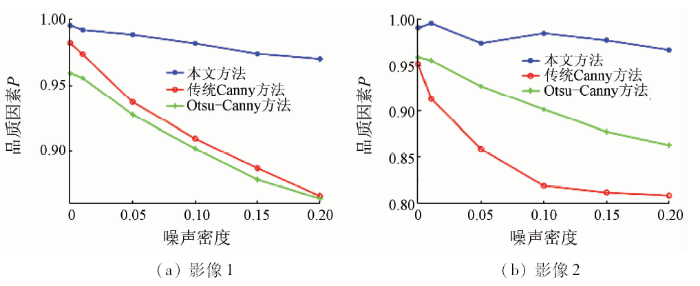
4.2 定量分析
为了验证算法的通用性和定性评价的可靠性,对影像1和影像2在无噪声和有噪声环境下进行了对比实验,采用Abdou等[12]提出的从边缘线的丢失、错误检测以及边缘点定位误差等方面综合考虑的品质因素
式中:
图4
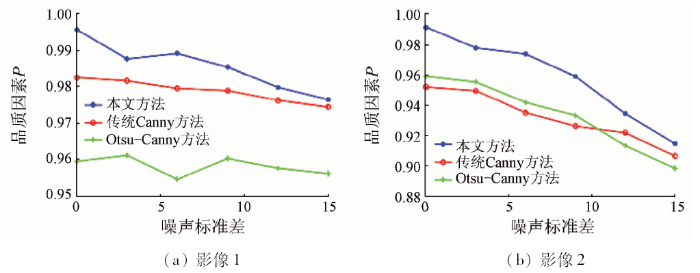
图5
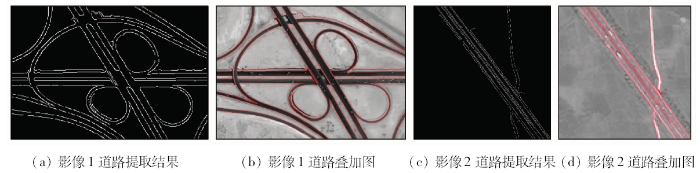
4.3 道路提取后处理及结果
本文方法克服了其他边缘算法抗噪性较差、边缘点判断准确性较低的缺点,由误检、漏检造成的杂乱边缘干扰较少、连续性也较好,因此可以依据边缘形状特征来判别边缘的类别,通过统计边缘线的尺寸,将大片面积和小片面积区域的边缘区分开[13]。定义一个形状特征描述参数L,对于灰度图像而言参数L表示边缘线的周长,对于二值图像参数L则表示边缘所包含的像素点的个数,统计图像中的边缘线,将小于参数L的边缘线剔除,实现道路边缘精细化处理。本文实验中L为边缘线像素点个数,影像1和影像2分别取值55和175,得到图6(a)和(c)。最后通过对道路边缘线进行映射来评价提取结果,将边缘线标红叠加到原始遥感影像上。如图6(b)和(d)所示可以直观地看到道路边缘提取的准确性较高,漏判、误判很少,提取效果明显。
图6
5 总结
本文从遥感影像的自身特征出发,在传统Canny边缘检测方法的思想上,提出了一种改进的遥感影像道路提取方法。
1)针对遥感影像受噪声影响较大的问题,利用一种平滑尺度自适应的高斯滤波器对影像进行降噪处理。该方法对噪声的抑制效果明显。
2)为了客观、准确地选取阈值来判断边缘点,采用基于目标尺度的局部特性双阈值选取方法,从而改善影像中丰富地物造成的边缘漏检、误检现象。
3)本文方法参数的设定无需人工参与,自动化程度较高,能通过较为简单的方法完成道路边缘线的提取且准确度较高。但是有少量与道路边缘线粘连的毛刺被提取出来,如何解决这一问题将是下一步研究的工作。
参考文献
结合Gabor纹理与几何特征的高分辨率遥感影像城区道路提取方法
[J].
DOI:10.3969/j.issn.1673-6338.2015.04.014
URL
[本文引用: 1]

在充分考虑道路频谱在不同频带、不同方向上能量分布的基础上,提出一种基于Gabor纹理与几何特征相结合的高分辨率遥感影像城区道路提取方法。首先通过Gabor滤波器组得到遥感影像不同频带、不同方向上的Gabor纹理特征,并利用K-means方法对遥感影像进行分割;然后利用形态学方法分割与道路相连的地物,并选取适当的几何特征剔除非道路地物;最后利用形态学方法对道路网进行修整。实验结果表明,该方法可以有效、便捷地从高分辨率遥感影像中提取城区主干道路网。
Urban road extraction of high resolution remotely sensed imagery with Gabor texture and geometrical features
[J].
高分辨率遥感图像道路分割算法
[J].<p>为了提高从高分辨率遥感图像(high-resolution remote sensing image,HRI)中提取道路信息的自动化程度和准确性,发展了一种HRI道路分割算法,主要包括光谱合并、边界合并和基于形状特征的道路区域提取等3个步骤。其中,前2个步骤是基于区域生长的图像分割算法。光谱合并综合考虑了区域的均值、方差等统计特征量,以提高分割精度; 边界合并采用了基于矢量梯度的边界计算方法,以准确提取多光谱HRI中的边界强度; 结合全局最优合并算法实现光谱和边界合并,以得到最优化的分割结果。在道路区域被完整分割出来的基础上,利用形状特征提取道路,采用圆形度特征区分道路和非道路。利用2景OrbView3多光谱图像进行道路提取实验的结果表明,该方法的道路提取结果总精度和Kappa系数分别在97%和0.8以上,明显优于SVM监督分类方法。</p>
A study of road segmentation from the high resolution remote sensing image
[J].
一种改进的SAR影像边缘检测方法
[J].由于SAR影像具有乘性相干斑噪声,某些对光学影像有较好检测性能的边缘检测算子,对于SAR影像并不适用,因此本文提出了一种将改进后的Ratio算子与Canny算子相组合的新方法。首先采用多种客观评价指标,得出经典方法中的Lee滤波能有效去除噪声,且最大限度保留了梯度信息,适用于边缘检测;然后对边缘检测具有恒虚警特性的Ratio算子进行改进,改进后的算子更利于影像归一化处理;最后利用改进后的Ratio算子与Canny算子组合成新方法。试验结果证明,组合后的新方法显著提高了边缘检测正确率和定位精度,改善了边缘连续性,具有一定的有效性和实用性。
An improved edge detection algorithm for SAR images
[J].
一种高分影像城区主干道半自动提取方法
[J].
DOI:10.3969/j.issn.1000-3177.2017.03.018
URL
[本文引用: 1]
针对高分影像中过于冗余的细节信息和城区道路的复杂结构特征,提出一种基于结构线束统计匹配的城区主干道半自动提取方法。该方法由道路基线检测、线束剖面特征统计和道路模式匹配3部分构成,其核心是基于边缘统计特征的路段剖面结构表达。道路基线的确定使得剖面结构特征更加稳定;模式匹配阶段加入了道路几何结构的先验约束,从而抑制了提取结果的歧义性。实验选取了不同场景和范围下的城区高分遥感影像,定性和定量的实验分析结果表明,该方法在道路提取的精度和稳定性方面具有较好的表现,道路边界和中线的同时提取使其更具实用性。
A semiautomatic extraction method for main-road in high resolution imagery
[J].
基于改进Sobel算子的遥感图像道路边缘检测方法
[J].<p>从遥感图像中提取道路边缘可以大量简化道路网的测绘与规划工作。传统边缘检测算子由于方向和模板尺寸的局限性,易造成检测结果中边缘点散乱、不连续或过多边缘点误判。基于道路边缘完整且连续的特点,针对传统检测效果并不理想的问题,提出了一种改进的Sobel算子,即5×5的8方向模板。从Sobel算子的基本原理出发,根据Pascal三角形理论推导出各方向的最优模板。研究表明,该算子不仅能较好地检测出更多方向上的边缘,而且能有效减少误判点,检测出的边缘线条更加平滑、完整,轮廓清晰且连续性好,尤其在弯曲道路检测中表现得更为突出,优于其他算子的检测效果。</p>
Road edge detection from remote sensing image based on improved Sobel operator
[J].
A computational approach to edge detection
[J].DOI:10.1109/TPAMI.1986.4767851 URL [本文引用: 1]
Scale-based fuzzy connected image segmentation:Theory,algorithms, and validation
[J].
DOI:10.1006/cviu.1999.0813
URL
[本文引用: 2]
This paper extends a previously reported theory and algorithms for object definition based on fuzzy connectedness. In this approach, a strength of connectedness is determined between every pair of image elements. This is done by considering all possible connecting paths between the two elements in each pair. The strength assigned to a particular path is defined as the weakest affinity between successive pairs of elements along the path. Affinity specifies the degree to which elements hang together locally in the image. Although the theory allowed any neighborhood size for affinity definition, it did not indicate how this was to be selected. By bringing object scale into the framework in this paper, not only the size of the neighborhood is specified but also it is allowed to change in different parts of the image. This paper argues that scale-based affinity, and hence connectedness, is natural in object definition and demonstrates that this leads to more effective object segmentation. The approach presented here considers affinity to consist of two components. The homogeneity-based component indicates the degree of affinity between image elements based on the homogeneity of their intensity properties. The object-feature-based component captures the degree of closeness of their intensity properties to some expected values of those properties for the object. A family of non-scale-based and scale-based affinity relations are constructed dictated by how we envisage the two components to characterize objects. A simple and effective method for giving a rough estimate of scale at different locations in the image is presented. The original theoretical and algorithmic framework remains more-or-less the same but considerably improved segmentations result. The method has been tested in several applications qualitatively. A quantitative statistical comparison between the non-scale-based and the scale-based methods was made based on 250 phantom images. These were generated from 10 patient MR brain studies by first segmenting the objects, then setting up appropriate intensity levels for the object and the background, and then by adding five different levels for each of noise and blurring and a fixed slow varying background component. Both the statistical and the subjective tests clearly indicate that the scale-based method is superior to the non-scale-based method in capturing details and in robustness to noise. It is also shown, based on these phantom images, that any (global) optimum threshold selection method will perform inferior to the fuzzy connectedness methods described in this paper.
Adaptive smoothing via contextual and local discontinuities
.[J].
DOI:10.1109/TPAMI.2005.190
URL
PMID:16237991
[本文引用: 1]
A novel adaptive smoothing approach is proposed for noise removal and feature preservation where two distinct measures are simultaneously adopted to detect discontinuities in an image. Inhomogeneity underlying an image is employed as a multiscale measure to detect contextual discontinuities for feature preservation and control of the smoothing speed, while local spatial gradient is used for detection of variable local discontinuities during smoothing. Unlike previous adaptive smoothing approaches, two discontinuity measures are combined in our algorithm for synergy in preserving nontrivial features, which leads to a constrained anisotropic diffusion process that inhomogeneity offers intrinsic constraints for selective smoothing. Thanks to the use of intrinsic constraints, our smoothing scheme is insensitive to termination times and the resultant images in a wide range of iterations are applicable to achieve nearly identical results for various early vision tasks. Our algorithm is formally analyzed and related to anisotropic diffusion. Comparative results indicate that our algorithm yields favorable smoothing results, and its application in extraction of hydrographic objects demonstrates its usefulness as a tool for early vision.
基于目标尺度的自适应高斯滤波
[J].
DOI:10.3778/j.issn.1002-8331.2010.12.004
URL
Magsci
[本文引用: 1]
将具有形态学意义的目标尺度与传统的线性高斯滤波相结合提出了一种自适应高斯滤波,它的主要思想是:利用求出的目标尺度来控制各像素点高斯滤波的方差和模板大小。针对原有的目标尺度求解算法不能适应可见光图像去噪的问题,一方面,引入中值滤波以去除对目标尺度求解影响较大的强噪声点,另一方面,又调整了求解目标尺度算法中的参数。仿真实验证明,该算法可以在去除噪声的同时保护图像的细节,而且不论从主观上还是客观上都优于传统的几类图像平滑算法,且不需要迭代求解,计算简单。
Adaptive Gaussian filter based on object scale
[J].
Quantitative design and evaluation of enhancement/thresholding edge detectors
[J].
DOI:10.1109/PROC.1979.11325
URL
[本文引用: 1]
Quantitative design and performance evaluation techniques are developed for the enhancement/thresholding class of image edge detectors. The design techniques are based on statistical detection theory and deterministic pattern-recognition classification procedures. The performance evaluation methods developed include: a)deterministic measurement of the edge gradient amplitude; b)comparison of the probabilities of correct and false edge detection; and c) figure of merit computation. The design techniques developed are used to optimally design a variety of small and large mask edge detectors. Theoretical and experimental comparisons of edge detectors are presented.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}