

0 引言
随着我国国产遥感卫星信息资源的增多,加强遥感影像信息在国民经济各行各业中的科学应用已成为遥感信息研究的重要工作内容之一。其中,从遥感影像中自动且准确地识别水体是遥感解译实现自动化和智能化的重要应用方向之一。
遥感数据的日益丰富为水体的精确提取提供了有利的条件。有研究者采用TM和ETM+[1]、MODIS[2,3]以及Sentinel-2[4]等数据进行水体提取,但是以上遥感数据空间分辨率较低,在全球尺度和流域尺度上提取大面积水体时能满足要求,但在提取较小面积的坑塘水库等水体时则存在较大误差。随着高分辨率遥感技术的进步,可以获得的高分辨率遥感数据日益增多。许多研究者开展了基于高分辨率遥感影像的水体提取研究。Yao等[5]和Yang等[6]都采用资源三号(ZY-3)卫星数据提取城市水体信息; 陈文倩等[7]和王瑾杰等[8]均采用国产高分一号(GF-1)卫星影像进行水体信息提取,空间分辨率获得较大提高。
在深度学习广泛使用之前,水体提取方法可分为4类: 单波段阈值法、多波段谱间关系法、水体指数法和遥感影像分类法。单波段阈值法计算简单但是受到阈值选择的影响较大,具有较大的主观性。另外,由于阴影和水体在遥感影像上的光谱特征具有高度相似性,采用阈值法时,部分阴影会被误分为水体。多波段谱间关系法综合利用了遥感影像多波段的光谱信息,建立了能区分水体和非水体的波段关系函数,能在一定程度上将水体和阴影区分开[9]。水体指数法利用遥感影像多波段信息构建区分水体和非水体的波段运算函数。其中最有代表性的方法为归一化差异水体指数(normalized difference water index,NDWI)[10]。Xu[11]提出改进型水体指数(modified normalized difference water index,MNDWI),利用中红外波段代替近红外波段,解决了NDWI在抑制建筑物方面的不足; Ogilvie等[12]基于MNDWI对小面积水体进行提取,其误差小于15%; Fisher等[13]基于SPOT5遥感影像提出利用所有4个波段的线性判别分析水体指数(linear discriminant analysis water index, LDAWI),在澳大利亚新南威尔士州的水体提取精度可达98%; Feyisa等[14]提出了利用TM影像5个波段来提取水体信息的自动水体提取指数 (automated water extraction index,AWEI)模型,从而有效地区分了水体和阴影; Wang等[15]在MNDWI的基础上提出增强水体指数(enhanced water index,EWI),能有效地提取背景为沙漠、土壤和植被的水体; Guo等[16]在NDWI和MNDWI的基础上提出一种加权归一化差异水体指数 (weighted normalized difference water index,WNDWI),在2个试验区域的验证结果表明WNDWI精度较NDWI,MNDWI和AWEI的精度高。但是IKONOS,QuickBird,ZY-3和GF-1等高空间分辨率遥感影像只有4个波段,均缺少中红外波段,这也限制了这些方法的应用。遥感影像分类法一般以水体的光谱特征和纹理特征作为分类依据,利用少量已标注样本数据进行分类器训练,最后采用支持向量机[17]、随机森林和人工神经网络等分类器对水体进行提取。Feng等[18]对比支持向量机、随机森林和人工神经网络提取水体的效果发现,随机森林精度介于支持向量机和人工神经网络之间,但是支持向量机存在较为复杂的参数寻优过程,而随机森林参数设置更加简单,更适合于快速提取水体。
随着深度学习技术的发展,卷积神经网络(convo-lutional neural networks, CNN)在计算机视觉领域的目标检测和分类应用中表现出了强大的性能。但是CNN只能判定整张图像的类别,不能判定每个像元的类别,不适用于遥感影像分类。而全卷积神经网络(fully convolutional networks, FCN)对CNN模型进行改进,采用反卷积层对CNN模型中最后一个卷积层的特征图进行上采样,使得特征图的分辨率恢复到输入原始影像大小,最后得到每个像元的分类结果。其中代表性模型有SegNet模型[19]、DeconvNet模型[20]、Deeplab模型[21]以及U-net模型[22]等。本研究采用的U-net模型最早用于医学影像的语义分割中,并在遥感影像处理中逐渐开始应用。伍广明等[23]基于U-net模型对航空影像进行建筑物检测; 苏健民等[24]研究发现,在遥感影像分类中U-net模型精度高于SegNet和DeconvNet模型。但是利用深度学习模型提取水体需要大量已标注的训练样本,而这类数据较难获得,因此U-net模型的水体提取效果还需要进一步验证。
基于以上分析,以安徽省巢湖流域部分区域为研究区,采用U-net模型和随机森林模型分别对研究区遥感影像中的水体进行提取,并比较其提取结果和模型训练效率,旨在选择一种快速、准确的基于高分辨率遥感影像的水体提取方法,为快速获得水体的分布信息以及合理利用水资源提供参考。
1 研究区概况及数据源
1.1 研究区概况
巢湖流域位于我国安徽省中部,地理坐标在E116°24'30″~118°0'0″,N30°58'40″~32°6'0″之间,流域总面积约1.35万km2。巢湖是巢湖流域最大水体,也是我国第五大淡水湖,行政区涉及巢湖县、庐江县、肥东县、肥西县和合肥市共5个县市,是周围居民生产和生活的水源,另外也涵盖了如防洪蓄水、渔业养殖和湿地生态旅游等多种功能,是长江下游重要的生态湿地。
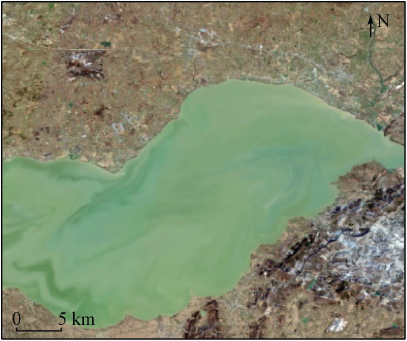
巢湖周边水体类型多样,存在众多且分布很不对称的沿湖河流,其中较大的河流有柘皋河、丰乐河和南淝河等,除河流以外还有大量的水库、坑塘水面等。另外,研究区内地物覆盖类型多样,不仅包含了大量水体,同时包含巢湖县城区以及沈家山、银屏山等山区,存在大量城市建筑物阴影和山体阴影。选取巢湖流域部分区域为研究区,如图1所示。
图1
1.2 数据源及其预处理
本研究以GF-1 PMS影像为数据源,利用2016年1月26日2景GF-1影像经过镶嵌得到研究区影像,共14 200像元×16 000像元(以下省略“像元”)。选择全色波段(2 m空间分辨率)和多光谱波段(8 m空间分辨率)数据进行融合,获得空间分辨率为2 m的多光谱影像。采用ENVI5.3软件进行影像预处理,包括正射校正、影像融合、镶嵌和裁剪等。通过目视解译获得训练样本标签和结果验证标签。具体操作是在ArcGIS10.3软件中,利用人工矢量化方法把研究区内地物分为水体和非水体2种类型。
2 研究方法
本研究采用的工作站安装64位Ubuntu 16.04系统,并配置i7700K CPU,48 G内存以及NVIDIA GeForce GTX1080ti GPU。在此基础上以Keras为框架,以Tensorflow为后端开发了基于U-net模型的水体提取程序。把研究区平均分为左右2部分,每部分影像大小为14 200×8 000,分别作为另一部分的训练样本,最终得到整个研究区的水体提取结果。
2.1 U-net模型
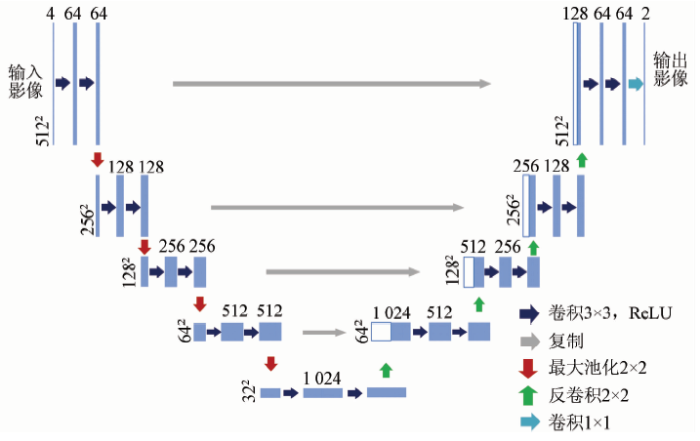
原始的U-net模型不适合用于遥感影像分类,本研究对U-net模型结构进行改进,网络结构如图2所示,一般分为左右2个部分,其中左侧为收缩路径,右侧为扩张路径,2个路径为对称关系,形态上接近U型结构。左侧收缩路径中,输入影像大小为512×512,维度为4,分别经过4个卷积层和池化层后,得到大小为32×32、维度为1 024的高维特征图; 随后右侧的扩张路径中逐层进行上采样,并与左侧收缩路径中对应层级的特征图进行融合,在网络的最后一层利用1×1的卷积层将64维的特征向量映射为512×512的输出影像; 再通过Sigmoid 函数进行分类,最终得到与输入影像空间分辨率一致的水体提取结果。
图2
2.2 随机森林模型
本研究采用水体指数和纹理特征作为随机森林分类特征。水体指数选择NDWI,即
式中B2和B4分别对应GF-1卫星影像第2波段和第4波段(即绿光波段和近红外波段)反射率。
纹理特征是影像局部区域中地物空间分布模式的一种精细描述,表达了对象同其邻近像元的相互关系。本研究采用ENVI5.3软件中二阶概率统计纹理分析工具,选择均值和方差2种纹理特征,计算窗口选择5×5。另外,较多的训练样本会极大增加模型的训练时间,故选择14 200×100个像元进行随机森林模型训练。
2.3 评价指标
本研究以目视解译结果作为模型精度评定标准,采用总体精度、Kappa系数、漏分误差和错分误差等4项评价指标进行结果评价。计算方法见表1。
表1 遥感影像分类结果评价指标
Tab.1
| 评价指标 | 计算方法 |
|---|---|
| 总体精度 | 正确分类像元数占总像元数的比例 |
| Kappa系数 | Kappa= |
| 漏分误差 | 水体错分为非水体的像元数占真实水体总像元数的比例 |
| 错分误差 | 非水体错分为水体的像元数占分类得到水体总像元数的比例 |
①式中: N为总像元数; xii为混淆矩阵对角线元素; xi·与x·i分别为混淆矩阵各行、各列之和。
3 结果分析与验证
3.1 大面积水体提取结果
图3为研究区U-net模型和随机森林模型提取水体的结果。2种模型在提取巢湖及沿湖河流以及面积较大的库塘时,结果差别不大,水体提取精度较高。提取的巢湖水体轮廓和边界清晰,且没有细碎的噪声斑块。另外,对巢湖的主干支流柘皋河也能高精度地提取出来,没有发生断续现象。人工目视解译提取水体面积为406.59 km2,U-net 模型提取水体面积为403.39 km2,随机森林模型提取水体面积为400.09 km2,U-net模型提取水体面积更接近于人工目视解译结果。
图3
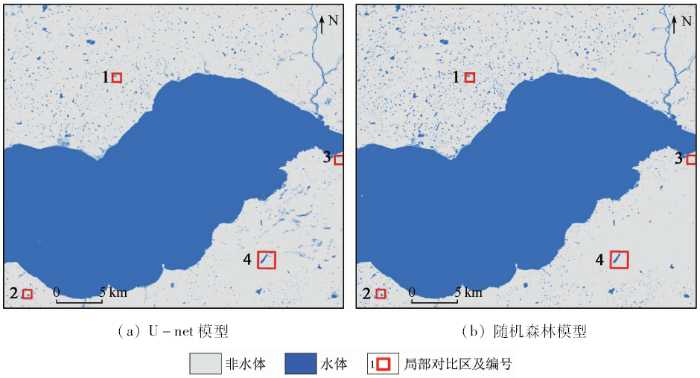
图3
水体提取结果对比
Fig.3
Comparison of the water extraction results between U-net and random forest
3.2 小面积水体提取结果
图4
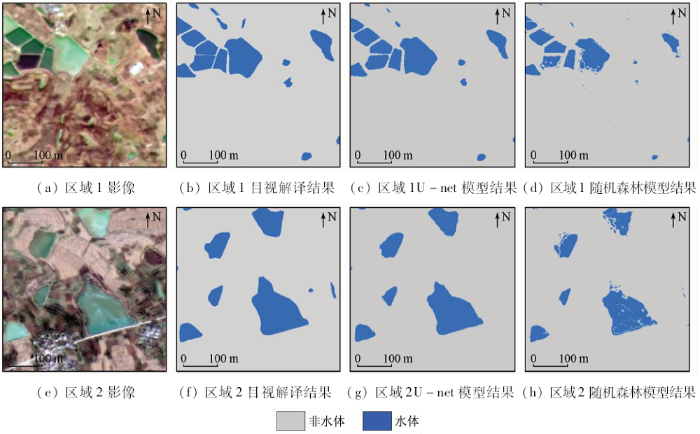
图4
小面积水体提取结果对比
Fig.4
Comparison of the extraction results for small water bodies
3.3 阴影复杂区水体提取结果
由于阴影和水体的光谱特征和纹理特征具有相似性,很多分类模型会把阴影误分为水体。而城市建筑物阴影和山体阴影是遥感影像中广泛存在的干扰因素。为了分析2种模型在包含阴影的复杂区域的水体提取效果,分别选取包含水体和阴影的城市建筑区和山区(图3红框区域3和区域4范围),水体提取结果如图5所示,其中红框内为主要阴影区,在城市建筑区(区域3)中,GF-1影像中包含大量的高层建筑物,由此产生大量阴影,另外影像中也存在部分小面积的水体。结果表明U-net模型结果和目视解译结果最为接近,在提取水体信息较好的情况下,基本没有发生阴影和水体误分的现象,但是随机森林模型将大量的建筑物阴影误分为水体。在山区(区域4)中,由于山体的遮挡,也会产生大量的阴影,山体的阴影面积更大且更加细碎。U-net模型提取水体轮廓完整、边界清晰,随机森林模型将大量的山体阴影误分为水体,造成了较大的分类误差。U-net模型几乎不存在把阴影误分为水体的情况,克服了山体阴影的干扰,且能较好地提取水体。
图5
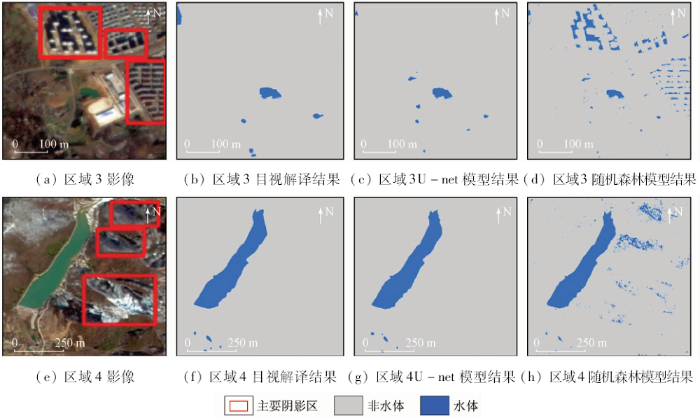
图5
U-net模型和随机森林模型去除阴影结果对比
Fig.5
Comparison of shadow removal results by U-net and random forest
3.4 精度验证
分别利用总体精度、Kappa系数、漏分误差和错分误差作为2个模型的结果评价指标,其结果如表2所示,U-net模型水体提取总体精度为98.69%,相对随机森林模型提高0.54%。U-net模型的Kappa系数为0.95,也高于随机森林模型的0.92。在2种模型漏分误差相差不大的情况下,U-net模型错分误差为1.18%,远小于随机森林模型错分误差2.99%,这主要是由于U-net模型在小面积水体和阴影去除方面具有较高的精度。
表2 水体提取精度对比
Tab.2
| 模型 | 总体精度/% | Kappa | 漏分误差/% | 错分误差/% |
|---|---|---|---|---|
| U-net | 98.69 | 0.95 | 1.90 | 1.18 |
| 随机森林 | 98.05 | 0.92 | 1.61 | 2.99 |
3.5 水体提取效率
U-net模型不仅提取水体的精度较高,其训练和提取水体的效率也明显优于随机森林模型。如表3所示,在提取研究区内所有水体时,U-net模型耗时1 136 s,而随机森林模型耗时14 126 s,且该时间还不包括在ENVI5.3软件中计算分类特征(NDWI和纹理特征)所用时间。U-net模型的训练样本数量比随机森林模型多80倍,但是训练和分类时间却仅为后者的1/12,这是由于U-net模型提取水体时采用GPU加速,可大大提高水体提取的效率。
表3 不同模型提取水体效率
Tab.3
| 模型 | 训练样本数/(像元×像元) | 耗时/s |
|---|---|---|
| U-net | 14 200×8 000 | 1 136 |
| 随机森林 | 14 200×100 | 14 126 |
4 讨论
现有研究表明混合像元的存在会导致小面积水体提取误差的增加[12],采用U-net模型也存在这一问题。这一现象在图4中表现为2方面: ①模型提取的水体面积比人工提取的边界略小; ②部分特别小的水体会被分类为非水体。这是由于人工目视解译提取水体时,提取原则是按照水体的最大外边界提取水体面积,会把混合像元分类为水体。而模型提取水体时以纯水像元作为训练样本,会把混合像元分类为非水体。这也导致2个模型的水体提取面积均小于目视解译结果。但是相对于现有大部分研究采用的MODIS,TM以及Sentinel等中低空间分辨率遥感影像,本文对GF-1遥感影像全色波段和多光谱波段进行融合处理,得到更高空间分辨率的多光谱影像,使得地物的边界轮廓更加清楚,能够显著降低混合像元的影响,更适合于对小面积水体进行精确提取。
遥感影像中阴影和水体的光谱曲线特征高度相似,采用阈值法、水体指数法以及遥感影像分类法等方法时,容易造成阴影和水体的误分。针对这一情况,许多研究者发展了用于剔除阴影干扰的方法,陈文倩等[7]和王瑾杰等[8]分别利用GF-1影像的B1,B2和B4 3个波段建立的阴影水体指数能消除绝大部分阴影,但是依赖人工设计的阈值指数往往很难对各种成像条件下的阴影和水体特征进行准确概括,从而导致该方法缺乏对不同数据的泛化能力。也有学者根据阴影成像的物理机制入手,提出阴影的消除方法,Yao等[5]在提取城市水体时建立建筑物和阴影的位置关系模型来消除建筑物阴影; 李炳亚等[27]利用数字高程模型数据建立阴影、山体和水体之间的空间位置关系,去除了山体阴影的干扰。但是此类方法需要复杂的建模过程,且仍然无法完全消除阴影的影响。而本研究采用的U-net模型则基本消除了建筑物和山体阴影的影响。
5 结论
本研究将U-net模型应用到GF-1高分辨率遥感影像水体信息的提取中,以巢湖流域部分区域为研究区,对比U-net模型和随机森林模型提取结果,经过精度评价和分析,得出以下结论:
1)以目视解译结果为标准,U-net模型总体精度为98.69%,Kappa系数为0.95,均高于随机森林模型。另外,U-net模型错分误差也远小于随机森林模型。
2)选用含有城市建筑物阴影和山体阴影的局部区域验证U-net模型的有效性,发现U-net模型在阴影去除方面相比随机森林模型有较大的优势。
3)U-net模型训练时只采用光谱信息作为输入,避免了传统机器学习所需的特征提取过程,并采用GPU对训练过程进行加速,在训练样本数量是随机森林模型80倍的条件下,耗时仅为后者的1/12,大大提高了水体提取效率。
参考文献
High-resolution mapping of global surface water and its long-term changes
[J].
An approach for global monitoring of surface water extent variations in reservoirs using MODIS data
[J].
Dynamic change analysis of surface water in the Yangtze River Basin based on MODIS products
[J].
Multi-spectral water index (MuWI):A native 10-m multi-spectral water index for accurate water mapping on Sentinel-2
[J].
High-resolution mapping of urban surface water using ZY-3 multi-spectral imagery
[J].
Automated extraction of urban water bodies from ZY-3 multi-spectral imagery
[J].
基于国产GF-1遥感影像的水体提取方法
[J].
Extraction of water information based on China-made GF-1 remote sense image
[J].
基于GF-1卫星影像的改进SWI水体提取方法
[J].
Method of water information extraction by improve SWI based on GF-1 satellite image
[J].
基于TM影像的几种常用水体提取方法的比较和分析
[J].
Comparison and analysis of several common water extraction methods based on TM image
[J].
The use of the normalized difference water index (NDWI) in the delineation of open water features
[J].
Modification of normalized difference water index (NDWI) to enhance open water features in remotely sensed imagery
[J].
Surface water monitoring in small water bodies:Potential and limits of multi-sensor Landsat time series
[J].
A water index for SPOT5 HRG satellite imagery,New South Wales,Australia,determined by linear discriminant analysis
[J].
Automated water extraction index:A new technique for surface water mapping using Landsat imagery
[J].
A simple enhanced water index (EWI) for percent surface water estimation using Landsat data
[J].
A weighted normalized difference water index for water extraction using Landsat imagery
[J].
基于SVM的湖泊咸度等级遥感信息提取方法——以内蒙古巴丹吉林沙漠为例
[J].
Extraction of remote sensing information for lake salinity level based on SVM:A case from Badain Jaran desert in Inner Mongolia
[J].
Urban flood mapping based on unmanned aerial vehicle remote sensing and random forest classifier:A case of Yuyao,China
[J].
SegNet:A deep convolutional encoder-decoder architecture for image segmentation
[EB/OL]. (
Learning deconvolution network for semantic segmentation
[C]//
DeepLab:Semantic image segmentation with deep convolutional nets,atrous convolution,and fully connected CRFs
[J].
U-Net:Convolutional networks for biomedical image segmentation
[C]//
基于U型卷积神经网络的航空影像建筑物检测
[J].
High precision building detection from aerial imagery using a U-Net like convolutional architecture
[J].
基于U-Net的高分辨率遥感图像语义分割方法
[J].
A U-Net based semantic segmentation method for high resolution remote sensing image
[J].
基于U-net分割和HEIV模型的遥感图像配准方法
[EB/OL]. (
Remote sensing image registration based on U-net segmentation and the HEIV model
[EB/OL]. (

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}