结合无人机载LiDAR点云法向量的K-means++聚类精简
Point cloud simplification method combining K-means++ clustering with UAV LiDAR point cloud normal vectors
结合无人机载LiDAR点云法向量的K-means++聚类精简 |
| 李沛婷, 赵庆展, 田文忠, 马永建 |
|
Point cloud simplification method combining K-means++ clustering with UAV LiDAR point cloud normal vectors |
| Peiting LI, Qingzhan ZHAO, Wenzhong TIAN, Yongjian MA |
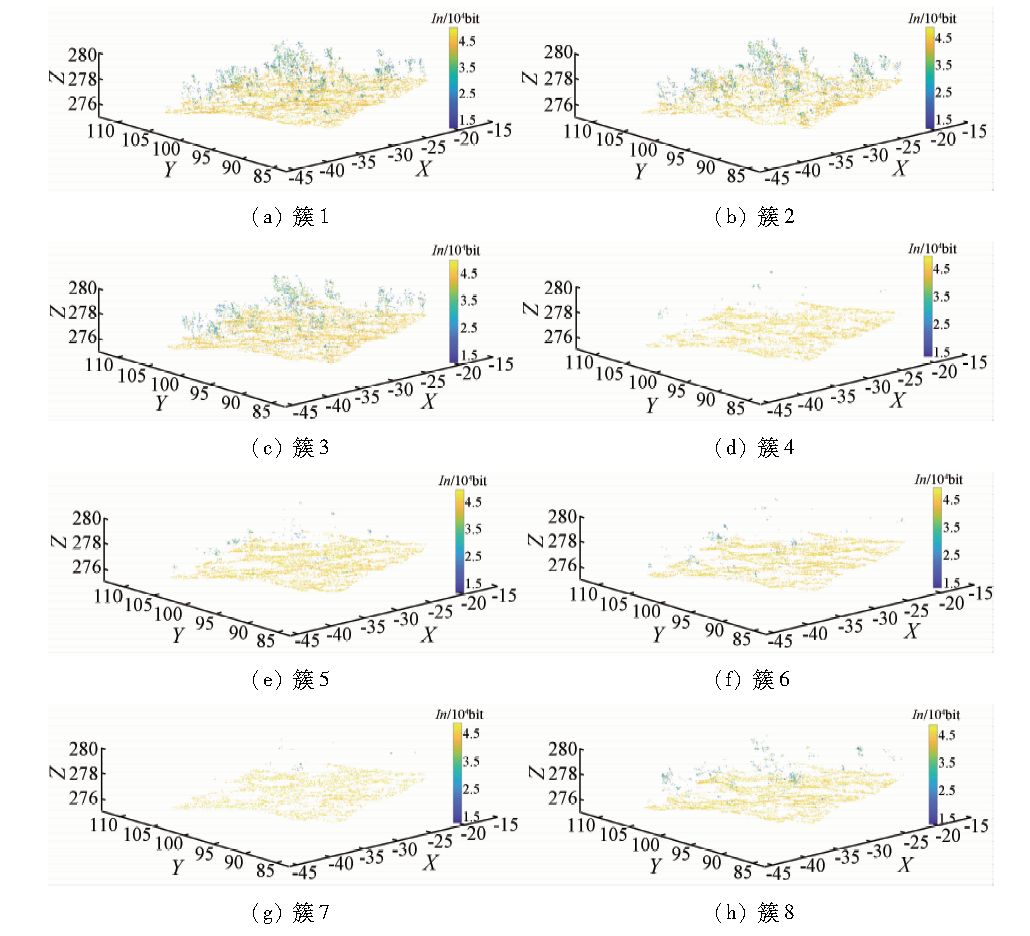
| 图6 K-means++对法向量聚类的三维可视化 |
| Fig.6 3D visualization of K-means++ for clustering point cloud normal vector |
|
|