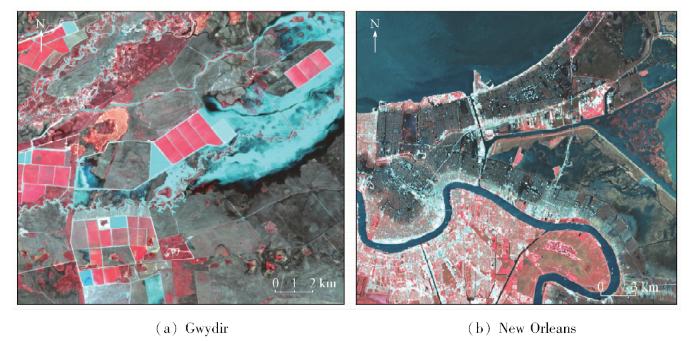
Remote sensing images with high spatiotemporal resolution offer a reliable way to the monitoring of flood disasters. However, the application of high spatial resolution images is restricted by satellite revisit period and extreme weather. Therefore, this paper proposes a method that can blend Landsat and MODIS images to generate high spatiotemporal images for monitoring flood disaster. Selecting Gwydir and the New Orleans as study areas, the authors performed fusion of MODIS and Landsat TM based on three major spatiotemporal fusion algorithms, i.e., the spatial and temporal adaptive reflectance fusion model (STARFM), the spatial and temporal reflectance unmixing model (STRUM) and the flexible spatiotemporal data fusion (FSDAF), which led to the formation of a new TM image. Meanwhile, classified flood information was extracted by applying support vector machine (SVM) to the new TM image. The results show that three spatiotemporal fusion algorithms can monitor flood disasters effectively, with FSDAF playing a more superior role in fusion accuracy and flood information extraction. Evaluation of flood classification shows that, in Gwydir, the overall accuracy of STARFM, STRUM and FSDAF is 0.89, 0.90, 0.91, and the Kappa coefficients are 0.63, 0.64, 0.67, respectively. In the New Orleans, the overall accuracy of three fusion algorithms is 0.90, 0.89, 0.91, and the Kappa coefficients are 0.77, 0.76, 0.81, respectively. This study shows that spatiotemporal fusion algorithms can be effectively applied to flood monitoring.
SHI Chenlie, WANG Xuhong, ZHANG Meng, LIU Zhuang, ZHU Xinming. Analysis of the applicability of three remote sensing spatiotemporal fusion algorithms in flood monitoring. REMOTE SENSING FOR LAND & RESOURCES[J], 2020, 32(2): 111-119 doi:10.6046/gtzyyg.2020.02.15
Integrated fusion of multi-scale polar-orbiting and geostationary satellite observations for the mapping of high spatial and temporal resolution land surface temperature
[J]. Remote Sensing of Environment, 2015,156:169-181.
Assessing the accuracy of blending Landsat-MODIS surface reflectances in two landscapes with contrasting spatial and temporal dynamics:A framework for algorithm selection
[J]. Remote Sensing of Environment, 2013,133:193-209.
... 近10 a来,国内外学者在遥感影像时空融合领域取得一系列成果[13,14].Gao等[15]提出的时空自适应反射率融合模型(spatial and temporal adaptive reflectance fusion model, STARFM)是应用最为广泛的融合算法,该算法将MODIS和Landsat影像的时间差、光谱差和距离差进行加权运算,生成反射率融合影像; Zhu等[16]在STARFM的基础上,提出了增强型时空自适应反射率融合模型(enhanced spatial and temporal adaptive reflectance fusion model,ESTARFM),有效解决了STARFM在异质性区域不能准确预测的问题; Gevaert等[17]提出了基于混合像元分解的时空反射率解混模型(spatial and temporal reflectance unmixing model, STRUM)算法并应用于归一化植被指数(normalized difference vegetation index,NDVI)的遥感图像融合,发现STRUM的融合结果优于STARFM; 邬明权等[18]提出一种基于像元反射率的时间变化特征和中分辨率影像纹理特征的时空融合算法(spatial and temporal data fusion model, STDFA),对南京市江宁区NDVI数据进行了空间重构.以上时空融合算法已广泛应用到地表温度监测[19,20]、植被变化监测[21]、农作物生长监测[22,23]等方面,但国内很少有人将其应用到洪水监测中,也几乎没有学者探究不同类型时空融合算法在洪水监测中的适用性.一个主要原因是大多时空融合算法假设基准日期和预测日期地物类型未发生变化,这对于突变事件(如火灾,洪水,滑坡)不能准确监测.Zhu等[24]针对现有融合算法的缺陷,提出了灵活的时空融合模型(flexible spatiotemporal data fusion,FSDAF),该算法结合混合像元分解,薄板样条函数插值以及距离加权等方法,对土地覆盖类型发生突变区域有更准确的预测,这也为高时空分辨率遥感影像监测洪水提供更准确的方法. ...
融合MODIS与Landsat数据生成高时间分辨率Landsat数据
1
2012
... 近10 a来,国内外学者在遥感影像时空融合领域取得一系列成果[13,14].Gao等[15]提出的时空自适应反射率融合模型(spatial and temporal adaptive reflectance fusion model, STARFM)是应用最为广泛的融合算法,该算法将MODIS和Landsat影像的时间差、光谱差和距离差进行加权运算,生成反射率融合影像; Zhu等[16]在STARFM的基础上,提出了增强型时空自适应反射率融合模型(enhanced spatial and temporal adaptive reflectance fusion model,ESTARFM),有效解决了STARFM在异质性区域不能准确预测的问题; Gevaert等[17]提出了基于混合像元分解的时空反射率解混模型(spatial and temporal reflectance unmixing model, STRUM)算法并应用于归一化植被指数(normalized difference vegetation index,NDVI)的遥感图像融合,发现STRUM的融合结果优于STARFM; 邬明权等[18]提出一种基于像元反射率的时间变化特征和中分辨率影像纹理特征的时空融合算法(spatial and temporal data fusion model, STDFA),对南京市江宁区NDVI数据进行了空间重构.以上时空融合算法已广泛应用到地表温度监测[19,20]、植被变化监测[21]、农作物生长监测[22,23]等方面,但国内很少有人将其应用到洪水监测中,也几乎没有学者探究不同类型时空融合算法在洪水监测中的适用性.一个主要原因是大多时空融合算法假设基准日期和预测日期地物类型未发生变化,这对于突变事件(如火灾,洪水,滑坡)不能准确监测.Zhu等[24]针对现有融合算法的缺陷,提出了灵活的时空融合模型(flexible spatiotemporal data fusion,FSDAF),该算法结合混合像元分解,薄板样条函数插值以及距离加权等方法,对土地覆盖类型发生突变区域有更准确的预测,这也为高时空分辨率遥感影像监测洪水提供更准确的方法. ...
Integrated fusion of multi-scale polar-orbiting and geostationary satellite observations for the mapping of high spatial and temporal resolution land surface temperature
1
2015
... 近10 a来,国内外学者在遥感影像时空融合领域取得一系列成果[13,14].Gao等[15]提出的时空自适应反射率融合模型(spatial and temporal adaptive reflectance fusion model, STARFM)是应用最为广泛的融合算法,该算法将MODIS和Landsat影像的时间差、光谱差和距离差进行加权运算,生成反射率融合影像; Zhu等[16]在STARFM的基础上,提出了增强型时空自适应反射率融合模型(enhanced spatial and temporal adaptive reflectance fusion model,ESTARFM),有效解决了STARFM在异质性区域不能准确预测的问题; Gevaert等[17]提出了基于混合像元分解的时空反射率解混模型(spatial and temporal reflectance unmixing model, STRUM)算法并应用于归一化植被指数(normalized difference vegetation index,NDVI)的遥感图像融合,发现STRUM的融合结果优于STARFM; 邬明权等[18]提出一种基于像元反射率的时间变化特征和中分辨率影像纹理特征的时空融合算法(spatial and temporal data fusion model, STDFA),对南京市江宁区NDVI数据进行了空间重构.以上时空融合算法已广泛应用到地表温度监测[19,20]、植被变化监测[21]、农作物生长监测[22,23]等方面,但国内很少有人将其应用到洪水监测中,也几乎没有学者探究不同类型时空融合算法在洪水监测中的适用性.一个主要原因是大多时空融合算法假设基准日期和预测日期地物类型未发生变化,这对于突变事件(如火灾,洪水,滑坡)不能准确监测.Zhu等[24]针对现有融合算法的缺陷,提出了灵活的时空融合模型(flexible spatiotemporal data fusion,FSDAF),该算法结合混合像元分解,薄板样条函数插值以及距离加权等方法,对土地覆盖类型发生突变区域有更准确的预测,这也为高时空分辨率遥感影像监测洪水提供更准确的方法. ...
基于FSDAF方法融合生成高时空分辨率地表温度
1
2018
... 近10 a来,国内外学者在遥感影像时空融合领域取得一系列成果[13,14].Gao等[15]提出的时空自适应反射率融合模型(spatial and temporal adaptive reflectance fusion model, STARFM)是应用最为广泛的融合算法,该算法将MODIS和Landsat影像的时间差、光谱差和距离差进行加权运算,生成反射率融合影像; Zhu等[16]在STARFM的基础上,提出了增强型时空自适应反射率融合模型(enhanced spatial and temporal adaptive reflectance fusion model,ESTARFM),有效解决了STARFM在异质性区域不能准确预测的问题; Gevaert等[17]提出了基于混合像元分解的时空反射率解混模型(spatial and temporal reflectance unmixing model, STRUM)算法并应用于归一化植被指数(normalized difference vegetation index,NDVI)的遥感图像融合,发现STRUM的融合结果优于STARFM; 邬明权等[18]提出一种基于像元反射率的时间变化特征和中分辨率影像纹理特征的时空融合算法(spatial and temporal data fusion model, STDFA),对南京市江宁区NDVI数据进行了空间重构.以上时空融合算法已广泛应用到地表温度监测[19,20]、植被变化监测[21]、农作物生长监测[22,23]等方面,但国内很少有人将其应用到洪水监测中,也几乎没有学者探究不同类型时空融合算法在洪水监测中的适用性.一个主要原因是大多时空融合算法假设基准日期和预测日期地物类型未发生变化,这对于突变事件(如火灾,洪水,滑坡)不能准确监测.Zhu等[24]针对现有融合算法的缺陷,提出了灵活的时空融合模型(flexible spatiotemporal data fusion,FSDAF),该算法结合混合像元分解,薄板样条函数插值以及距离加权等方法,对土地覆盖类型发生突变区域有更准确的预测,这也为高时空分辨率遥感影像监测洪水提供更准确的方法. ...
基于FSDAF方法融合生成高时空分辨率地表温度
1
2018
... 近10 a来,国内外学者在遥感影像时空融合领域取得一系列成果[13,14].Gao等[15]提出的时空自适应反射率融合模型(spatial and temporal adaptive reflectance fusion model, STARFM)是应用最为广泛的融合算法,该算法将MODIS和Landsat影像的时间差、光谱差和距离差进行加权运算,生成反射率融合影像; Zhu等[16]在STARFM的基础上,提出了增强型时空自适应反射率融合模型(enhanced spatial and temporal adaptive reflectance fusion model,ESTARFM),有效解决了STARFM在异质性区域不能准确预测的问题; Gevaert等[17]提出了基于混合像元分解的时空反射率解混模型(spatial and temporal reflectance unmixing model, STRUM)算法并应用于归一化植被指数(normalized difference vegetation index,NDVI)的遥感图像融合,发现STRUM的融合结果优于STARFM; 邬明权等[18]提出一种基于像元反射率的时间变化特征和中分辨率影像纹理特征的时空融合算法(spatial and temporal data fusion model, STDFA),对南京市江宁区NDVI数据进行了空间重构.以上时空融合算法已广泛应用到地表温度监测[19,20]、植被变化监测[21]、农作物生长监测[22,23]等方面,但国内很少有人将其应用到洪水监测中,也几乎没有学者探究不同类型时空融合算法在洪水监测中的适用性.一个主要原因是大多时空融合算法假设基准日期和预测日期地物类型未发生变化,这对于突变事件(如火灾,洪水,滑坡)不能准确监测.Zhu等[24]针对现有融合算法的缺陷,提出了灵活的时空融合模型(flexible spatiotemporal data fusion,FSDAF),该算法结合混合像元分解,薄板样条函数插值以及距离加权等方法,对土地覆盖类型发生突变区域有更准确的预测,这也为高时空分辨率遥感影像监测洪水提供更准确的方法. ...
Fusing Landsat and MODIS data for vegetation monitoring
1
2015
... 近10 a来,国内外学者在遥感影像时空融合领域取得一系列成果[13,14].Gao等[15]提出的时空自适应反射率融合模型(spatial and temporal adaptive reflectance fusion model, STARFM)是应用最为广泛的融合算法,该算法将MODIS和Landsat影像的时间差、光谱差和距离差进行加权运算,生成反射率融合影像; Zhu等[16]在STARFM的基础上,提出了增强型时空自适应反射率融合模型(enhanced spatial and temporal adaptive reflectance fusion model,ESTARFM),有效解决了STARFM在异质性区域不能准确预测的问题; Gevaert等[17]提出了基于混合像元分解的时空反射率解混模型(spatial and temporal reflectance unmixing model, STRUM)算法并应用于归一化植被指数(normalized difference vegetation index,NDVI)的遥感图像融合,发现STRUM的融合结果优于STARFM; 邬明权等[18]提出一种基于像元反射率的时间变化特征和中分辨率影像纹理特征的时空融合算法(spatial and temporal data fusion model, STDFA),对南京市江宁区NDVI数据进行了空间重构.以上时空融合算法已广泛应用到地表温度监测[19,20]、植被变化监测[21]、农作物生长监测[22,23]等方面,但国内很少有人将其应用到洪水监测中,也几乎没有学者探究不同类型时空融合算法在洪水监测中的适用性.一个主要原因是大多时空融合算法假设基准日期和预测日期地物类型未发生变化,这对于突变事件(如火灾,洪水,滑坡)不能准确监测.Zhu等[24]针对现有融合算法的缺陷,提出了灵活的时空融合模型(flexible spatiotemporal data fusion,FSDAF),该算法结合混合像元分解,薄板样条函数插值以及距离加权等方法,对土地覆盖类型发生突变区域有更准确的预测,这也为高时空分辨率遥感影像监测洪水提供更准确的方法. ...
遥感数据时空融合技术在农作物监测中的适应性研究
1
2012
... 近10 a来,国内外学者在遥感影像时空融合领域取得一系列成果[13,14].Gao等[15]提出的时空自适应反射率融合模型(spatial and temporal adaptive reflectance fusion model, STARFM)是应用最为广泛的融合算法,该算法将MODIS和Landsat影像的时间差、光谱差和距离差进行加权运算,生成反射率融合影像; Zhu等[16]在STARFM的基础上,提出了增强型时空自适应反射率融合模型(enhanced spatial and temporal adaptive reflectance fusion model,ESTARFM),有效解决了STARFM在异质性区域不能准确预测的问题; Gevaert等[17]提出了基于混合像元分解的时空反射率解混模型(spatial and temporal reflectance unmixing model, STRUM)算法并应用于归一化植被指数(normalized difference vegetation index,NDVI)的遥感图像融合,发现STRUM的融合结果优于STARFM; 邬明权等[18]提出一种基于像元反射率的时间变化特征和中分辨率影像纹理特征的时空融合算法(spatial and temporal data fusion model, STDFA),对南京市江宁区NDVI数据进行了空间重构.以上时空融合算法已广泛应用到地表温度监测[19,20]、植被变化监测[21]、农作物生长监测[22,23]等方面,但国内很少有人将其应用到洪水监测中,也几乎没有学者探究不同类型时空融合算法在洪水监测中的适用性.一个主要原因是大多时空融合算法假设基准日期和预测日期地物类型未发生变化,这对于突变事件(如火灾,洪水,滑坡)不能准确监测.Zhu等[24]针对现有融合算法的缺陷,提出了灵活的时空融合模型(flexible spatiotemporal data fusion,FSDAF),该算法结合混合像元分解,薄板样条函数插值以及距离加权等方法,对土地覆盖类型发生突变区域有更准确的预测,这也为高时空分辨率遥感影像监测洪水提供更准确的方法. ...
遥感数据时空融合技术在农作物监测中的适应性研究
1
2012
... 近10 a来,国内外学者在遥感影像时空融合领域取得一系列成果[13,14].Gao等[15]提出的时空自适应反射率融合模型(spatial and temporal adaptive reflectance fusion model, STARFM)是应用最为广泛的融合算法,该算法将MODIS和Landsat影像的时间差、光谱差和距离差进行加权运算,生成反射率融合影像; Zhu等[16]在STARFM的基础上,提出了增强型时空自适应反射率融合模型(enhanced spatial and temporal adaptive reflectance fusion model,ESTARFM),有效解决了STARFM在异质性区域不能准确预测的问题; Gevaert等[17]提出了基于混合像元分解的时空反射率解混模型(spatial and temporal reflectance unmixing model, STRUM)算法并应用于归一化植被指数(normalized difference vegetation index,NDVI)的遥感图像融合,发现STRUM的融合结果优于STARFM; 邬明权等[18]提出一种基于像元反射率的时间变化特征和中分辨率影像纹理特征的时空融合算法(spatial and temporal data fusion model, STDFA),对南京市江宁区NDVI数据进行了空间重构.以上时空融合算法已广泛应用到地表温度监测[19,20]、植被变化监测[21]、农作物生长监测[22,23]等方面,但国内很少有人将其应用到洪水监测中,也几乎没有学者探究不同类型时空融合算法在洪水监测中的适用性.一个主要原因是大多时空融合算法假设基准日期和预测日期地物类型未发生变化,这对于突变事件(如火灾,洪水,滑坡)不能准确监测.Zhu等[24]针对现有融合算法的缺陷,提出了灵活的时空融合模型(flexible spatiotemporal data fusion,FSDAF),该算法结合混合像元分解,薄板样条函数插值以及距离加权等方法,对土地覆盖类型发生突变区域有更准确的预测,这也为高时空分辨率遥感影像监测洪水提供更准确的方法. ...
构建时空融合模型进行水稻遥感识别
1
2016
... 近10 a来,国内外学者在遥感影像时空融合领域取得一系列成果[13,14].Gao等[15]提出的时空自适应反射率融合模型(spatial and temporal adaptive reflectance fusion model, STARFM)是应用最为广泛的融合算法,该算法将MODIS和Landsat影像的时间差、光谱差和距离差进行加权运算,生成反射率融合影像; Zhu等[16]在STARFM的基础上,提出了增强型时空自适应反射率融合模型(enhanced spatial and temporal adaptive reflectance fusion model,ESTARFM),有效解决了STARFM在异质性区域不能准确预测的问题; Gevaert等[17]提出了基于混合像元分解的时空反射率解混模型(spatial and temporal reflectance unmixing model, STRUM)算法并应用于归一化植被指数(normalized difference vegetation index,NDVI)的遥感图像融合,发现STRUM的融合结果优于STARFM; 邬明权等[18]提出一种基于像元反射率的时间变化特征和中分辨率影像纹理特征的时空融合算法(spatial and temporal data fusion model, STDFA),对南京市江宁区NDVI数据进行了空间重构.以上时空融合算法已广泛应用到地表温度监测[19,20]、植被变化监测[21]、农作物生长监测[22,23]等方面,但国内很少有人将其应用到洪水监测中,也几乎没有学者探究不同类型时空融合算法在洪水监测中的适用性.一个主要原因是大多时空融合算法假设基准日期和预测日期地物类型未发生变化,这对于突变事件(如火灾,洪水,滑坡)不能准确监测.Zhu等[24]针对现有融合算法的缺陷,提出了灵活的时空融合模型(flexible spatiotemporal data fusion,FSDAF),该算法结合混合像元分解,薄板样条函数插值以及距离加权等方法,对土地覆盖类型发生突变区域有更准确的预测,这也为高时空分辨率遥感影像监测洪水提供更准确的方法. ...
构建时空融合模型进行水稻遥感识别
1
2016
... 近10 a来,国内外学者在遥感影像时空融合领域取得一系列成果[13,14].Gao等[15]提出的时空自适应反射率融合模型(spatial and temporal adaptive reflectance fusion model, STARFM)是应用最为广泛的融合算法,该算法将MODIS和Landsat影像的时间差、光谱差和距离差进行加权运算,生成反射率融合影像; Zhu等[16]在STARFM的基础上,提出了增强型时空自适应反射率融合模型(enhanced spatial and temporal adaptive reflectance fusion model,ESTARFM),有效解决了STARFM在异质性区域不能准确预测的问题; Gevaert等[17]提出了基于混合像元分解的时空反射率解混模型(spatial and temporal reflectance unmixing model, STRUM)算法并应用于归一化植被指数(normalized difference vegetation index,NDVI)的遥感图像融合,发现STRUM的融合结果优于STARFM; 邬明权等[18]提出一种基于像元反射率的时间变化特征和中分辨率影像纹理特征的时空融合算法(spatial and temporal data fusion model, STDFA),对南京市江宁区NDVI数据进行了空间重构.以上时空融合算法已广泛应用到地表温度监测[19,20]、植被变化监测[21]、农作物生长监测[22,23]等方面,但国内很少有人将其应用到洪水监测中,也几乎没有学者探究不同类型时空融合算法在洪水监测中的适用性.一个主要原因是大多时空融合算法假设基准日期和预测日期地物类型未发生变化,这对于突变事件(如火灾,洪水,滑坡)不能准确监测.Zhu等[24]针对现有融合算法的缺陷,提出了灵活的时空融合模型(flexible spatiotemporal data fusion,FSDAF),该算法结合混合像元分解,薄板样条函数插值以及距离加权等方法,对土地覆盖类型发生突变区域有更准确的预测,这也为高时空分辨率遥感影像监测洪水提供更准确的方法. ...
A flexible spatiotemporal method for fusing satellite images with different resolutions
3
2016
... 近10 a来,国内外学者在遥感影像时空融合领域取得一系列成果[13,14].Gao等[15]提出的时空自适应反射率融合模型(spatial and temporal adaptive reflectance fusion model, STARFM)是应用最为广泛的融合算法,该算法将MODIS和Landsat影像的时间差、光谱差和距离差进行加权运算,生成反射率融合影像; Zhu等[16]在STARFM的基础上,提出了增强型时空自适应反射率融合模型(enhanced spatial and temporal adaptive reflectance fusion model,ESTARFM),有效解决了STARFM在异质性区域不能准确预测的问题; Gevaert等[17]提出了基于混合像元分解的时空反射率解混模型(spatial and temporal reflectance unmixing model, STRUM)算法并应用于归一化植被指数(normalized difference vegetation index,NDVI)的遥感图像融合,发现STRUM的融合结果优于STARFM; 邬明权等[18]提出一种基于像元反射率的时间变化特征和中分辨率影像纹理特征的时空融合算法(spatial and temporal data fusion model, STDFA),对南京市江宁区NDVI数据进行了空间重构.以上时空融合算法已广泛应用到地表温度监测[19,20]、植被变化监测[21]、农作物生长监测[22,23]等方面,但国内很少有人将其应用到洪水监测中,也几乎没有学者探究不同类型时空融合算法在洪水监测中的适用性.一个主要原因是大多时空融合算法假设基准日期和预测日期地物类型未发生变化,这对于突变事件(如火灾,洪水,滑坡)不能准确监测.Zhu等[24]针对现有融合算法的缺陷,提出了灵活的时空融合模型(flexible spatiotemporal data fusion,FSDAF),该算法结合混合像元分解,薄板样条函数插值以及距离加权等方法,对土地覆盖类型发生突变区域有更准确的预测,这也为高时空分辨率遥感影像监测洪水提供更准确的方法. ...
Assessing the accuracy of blending Landsat-MODIS surface reflectances in two landscapes with contrasting spatial and temporal dynamics:A framework for algorithm selection
2
2013
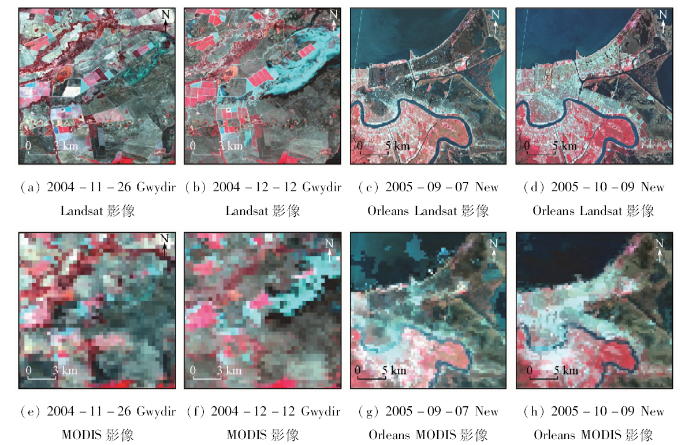
... 此外,Gwydir研究区数据已经经过了预处理[25]; New Orleans研究区Landsat影像为Level 1T产品,是经过系统辐射校正和几何纠正的一级产品,只需做大气校正预处理. MODIS 8 d合成产品(MOD09GA)是经过大气校正和几何纠正的二级产品,首先需要用MRT工具对MODIS影像进行重投影并将其转换为和Landsat同样的UTM投影; 其次将MODIS影像重采样至Landsat影像空间分辨率(30 m); 再将MODIS和Landsat进行几何精纠正,使两者影像完全匹配,误差控制在0.5像素; 最后进行波段调整,保证MODIS波段和Landsat波段一一对应.图2为研究区影像,其中,图2(a)—(d)为Landsat B4(R),B3(G),B2(B)合成影像,图2(e)—(h)为MODIS B2(R),B1(G),B4(B)合成影像. ...




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}