

0 引言
应用卫星遥感技术获取地球表面物体的遥感图像,为气候观察预测、地球资源普查、环境污染检测和自然灾害监测等领域提供了大量的遥感信息。然而在遥感成像过程中,因受大气密度、天气变化等影响,许多卫星遥感图像存在云层遮挡的“盲区”,图像地物信息的丢失不利于对地物进行分析与解释。因而实时有效的云层检测,去除云覆盖率大的图像,对于缓解遥感图像的海量数据对传输通道的压力和提高遥感图像利用率有着重要意义[1]。
目前,遥感影像云检测方法多种多样,可以根据是否使用多期影像构建参考影像对目标影像进行变化检测,简单地分为多时相检测法[2]和单时相检测法[3]。也可以按照基础理论和研究方法的差异分为4类: 物理阈值法[4]、纹理特征法[5]、模式识别检测法[6]和综合优化法[7]。多时相检测法有着较高的检测精度,但是多时相检测法存在参考数据获取难度大的问题。陈前等[8]利用各季节的晴空遥感数据构建晴空背景场作为参考影像,对云层进行检测提取,有效地去除了城市区域的高亮地物,提高了云检测的正确率。物理阈值法是应用最广的检测方法,其实质是基于影像的光谱特征对云层进行检测提取,具有简单、应用广泛等特点,但是受限于传感器类型,普适性较差。云雅等[9]通过分析云区域的光谱特征,结合高分一号传感器参数特征得到波谱特征的稳定阈值,实现了针对高分一号多光谱数据的自动化云检测。纹理特征法本质是利用统计学方法提取影像纹理特征和空间特征对云层进行检测识别,但对于纹理较强的云层,如卷积云、点云等识别精度不足。陈振炜等[10]通过对影像进行增强处理扩大云与地物之间纹理差异,选择二阶矩和一阶差分等纹理特征进行云层检测,实现了资源三号的自动云检测。模式识别检测法的关键在于选择合适的训练样本,设计优秀的云检测器,通过对检测器的不断优化训练,达到对云层进行检测提取的目的。徐启恒等[11]利用卷积神经网络算法对国产高分卫星进行了云检测研究。模式识别检测法能够较好地识别出各类云层,且训练良好的云检测器具有一定的普适性,但是检测器的精度对训练样本的数量和准确度要求都很高。综合优化法则是通过多种研究方法的综合使用来实现对云层的检测。以往的研究表明,使用综合优化法的检测精度要显著优于单一的检测算法。如Ricciardelli等[7]所提出的MACSP(cloud mask coupling of statistical and physical methods algorithm)算法就是综合利用了物理和统计学的综合优化检测法。
基于上述研究,本文提出一种高精度、高普适性的国产高分卫星云检测方法。针对高分一号卫星数据,分析云层与地物的光谱特征差异与纹理特征差异,结合支持向量机算法进行云层检测研究,并与传统支持向量机法和最大似然值法进行定量对比分析。
1 实验数据
1.1 样本数据的选择与处理
表1 高分一号卫星8 m传感器参数
Tab.1
| 参数 | 参数值 |
|---|---|
| 波段范围/μm | 0.45~0.52 |
| 0.52~0.59 | |
| 0.63~0.69 | |
| 0.77~0.89 | |
| 空间分辨率/m | 8 |
| 幅宽/km | 60(2台相机组合) |
| 重访周期(侧摆时)/d | 4 |
| 覆盖周期(不侧摆)/d | 41 |
表2 样本数据
Tab.2
| 编号 | 相机 | 中心经纬度 | 影像获取日期 |
|---|---|---|---|
| 1 | PMS1 | E81.2°,N44.4° | 2015/07/24 |
| 2 | PMS2 | E80.9°,N44.6° | 2015/07/04 |
| 3 | PMS2 | E117.5°,N29.7° | 2014/01/06 |
| 4 | PMS2 | E117.8°,N30.8° | 2014/01/06 |
| 5 | PMS2 | E118.0°,N31.4° | 2014/01/06 |
| 6 | PMS1 | E118.4°,N30.0° | 2016/01/14 |
| 7 | PMS1 | E116.4°,N30.0° | 2014/02/20 |
| 8 | PMS1 | E116.6°,N30.5° | 2013/09/19 |
| 9 | PMS1 | E118.0°,N32.2° | 2013/07/08 |
| 10 | PMS1 | E117.7°,N31.9° | 2018/07/12 |
| 11 | PMS1 | E117.7°,N30.3° | 2015/08/22 |
在进行云检测之前,需要通过辐射定标消除影像传感器本身造成的误差,通过结合数字高程模型(digital elevation model,DEM)和几何成像模型参数文件(rational polynomial cofficients,RPC)的几何精纠正消除地形带来的误差。通过预处理能够实现影像灰度值的量化,使其从无量纲的原始DN值变为代表反射率的有量纲值,准确地反映地物反射率和各波段之间的关系。然后通过编程将预处理后的高分一号影像进行规格化处理,切分成32像元×32像元大小的瓦片作为备选训练样本。最后采用人工判读的方式,逐一对瓦片进行标签化,即对瓦片进行分类,分为云层和地物,剔除存在的混合地物瓦片,形成最终的训练样本。最终共选取2 300个瓦片作为训练样本,其中代表云的瓦片1 116个,代表地物(包括水域、森林、裸地和不透水层)的瓦片1 184个(图1)。
图1
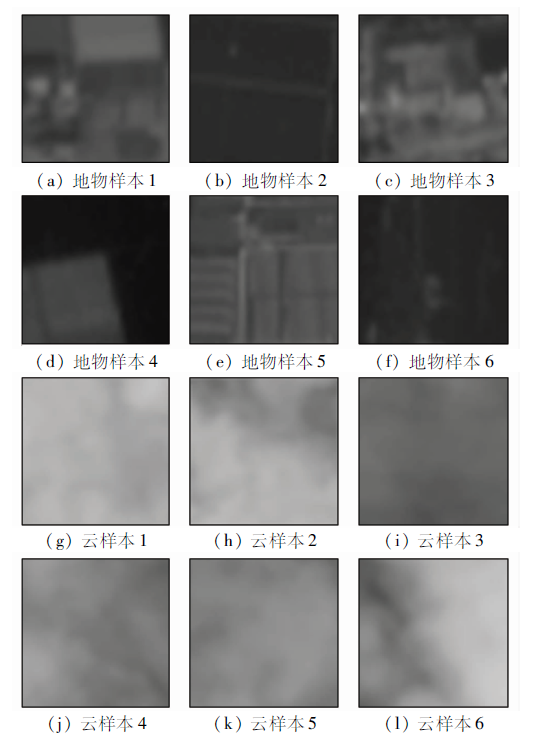
表3 验证数据
Tab.3
| 编号 | 相机 | 中心经纬度 | 影像获取日期 |
|---|---|---|---|
| 1 | PMS1 | E116.7°,N30.6° | 2015/10/01 |
| 2 | PMS2 | E117.9°,N30.2° | 2014/04/14 |
| 3 | PMS2 | E118.0°,N30.2° | 2014/10/06 |
| 4 | PMS1 | E116.0°,N30.7° | 2015/09/07 |
图2
2 实验方法
2.1 研究思路
为实现云检测,采集代表云和地物的影像作为样本,并对样本模块大小标准化,依次按照训练时所用的模块窗口对图像进行遍历计算特征值; 针对云和地物在大气辐射特性和纹理结构上各自的特点和区别,结合高分一号卫星遥感图像提取云和地物的光谱特征,以及基于灰度共生矩阵提取云和地物的纹理结构特征,以此构造特征向量,在此基础上,采用支持向量机的分类方法对高分一号卫星遥感图像进行云层检测研究。
2.2 图像特征分析
云层是由大气中的水滴、冰晶或它们的混合物组成的具有一定几何形状和层次分布的悬浮体。云在可见光和近红外波段对太阳光的吸收率均较小,具有较高的反射率,在近红外和中红外波段内的反射率随波长的增加而下降。由此可见,可见光对云层比较敏感,反射率较高,能够较好地度量识别云层。
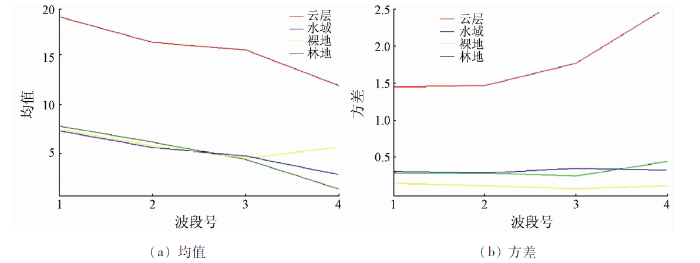
光谱信息反映了地物反射或发射电磁波能量的大小,是地物特征性状较直观的表达。通过对云和地物的光谱特性进行特征提取和比较,达到区分二者的目的。基于上文获取的训练样本,对云层和各种地物的光谱进行统计和分析。经过对比,发现均值和方差能够较好地反映云层与地物的光谱差异,如图3所示。均值用于衡量影像整体的平均反射强度; 方差反映像元灰度值与平均灰度值的总离散程度。
图3
具体公式分别为:
式中: f为像元值;
云的纹理是云表面灰度或颜色的某种变化的表现形式,主要体现了云的变化状态。由于在现实中云通常分为多种类别,如层云、卷积云等,这些类别导致云有不同的纹理结构,这些纹理结构的表现可以分为平整与起伏、粗糙与平滑、规则与杂乱等。
在高分一号卫星遥感图像中,云和地物具有更加详细的几何和纹理结构,云在图像中往往呈现为均一的纹理,同时图像中的河流等区域也具有较均匀的纹理。此外,不同类型云的纹理差异较大。在图像中厚云常表现为大面积覆盖,呈现连续分布的特性。
常见的纹理特征提取方法有一阶特征、二阶特征、灰度行程方法和灰度共生矩阵等[14]。其中又以灰度共生矩阵应用范围最为广泛,灰度共生矩阵作为一种基于灰度的空间相关特性来描述纹理的方法,它能反映出灰度的分布特性,可获取14个纹理特征描述符。但是这14个描述符具有较强的相关性,通过对比分析,发现提取角二阶矩(angular second moment,ASM)、逆差矩(inverse difference moment,IDM)、对比度(contrast,CON)和熵(entropy,ENT)这4种统计量的特征参数对云检测具有较好的区分效果。获得上述纹理特征向量后,对比云和地物特征分量大小。结果如图4所示,对从总样本中随机选取的716个样本瓦片进行的纹理特征提取,横坐标表示样本数,其中前316幅为云样本,后400幅为地物样本,纵坐标表示纹理特征的4种统计量。由图4可知基于灰度共生矩阵的纹理特征量,云和地物在细节纹理差异较大,通过纹理能够较好地区分云和地物。
图4
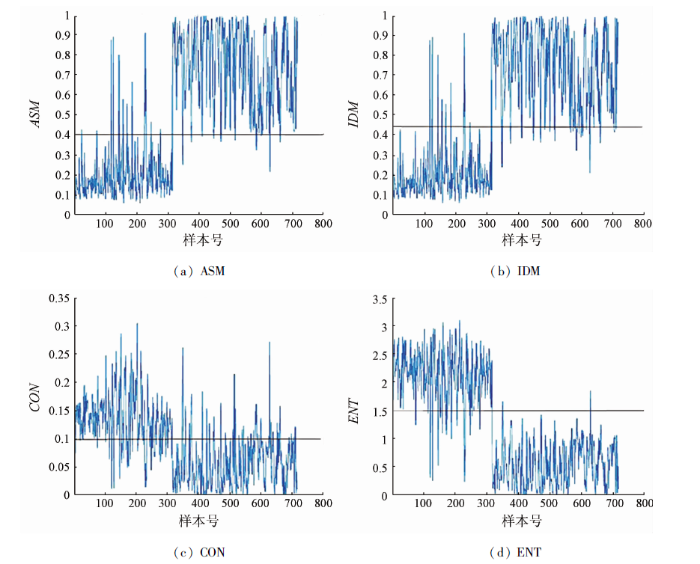
图4
基于灰度共生矩阵的纹理特征
Fig.4
Texture features based on grayscale co-occurrence matrix
2.3 支持向量机分类器构建
Cortes等[15]于1995年提出的支持向量机算法在模式识别、回归估计、概率密度函数等方面都有应用,尤其在解决小样本、非线性及高维模式识别中表现出许多特有的优势,并能够推广应用到函数拟合等其他机器学习问题中。支持向量机算法可以分为线性支持向量机和非线性支持向量机[16]。线性支持向量机是利用最大分类间隙来设计决策最优分类超平面的算法,但是当样本变得非常复杂时,不是所有的点都是线性可分的,这时可以把线性不可分的情况进行转换,利用核函数构建非线性的分类器进行处理。采用最优分类超平面的线性支持向量机和使用核函数的非线性支持向量机的工作原理分别如图5所示,可以看出通过线性分类器无法完成的分类,可以很容易地找到一个非线性的核函数进行分类。本文就是利用台湾大学林智仁教授等开发设计的开源软件包LIBSVM和MATLAB平台构建核函数的支持向量机。
图5
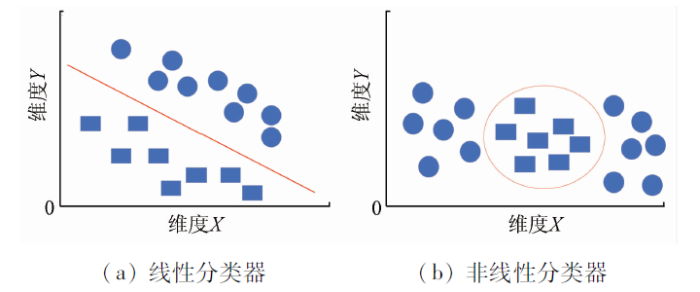
图5
线性和非线性分类器示意图
Fig.5
Schematic diagram of linear classifier and nonlinear classifier
构建优秀模式识别检测的关键除了选择可靠的训练样本和设计合理的分类器外,还要基于样本对分类器进行训练和优化,达到理想的拟合状态。为了达到理想的拟合,将制作的2 300个瓦片样本随机分为2个部分,500个作为检验样本不参与分类器训练,另外1 800个瓦片随机选出300个样本作为初始训练样本,剩余的1 500个样本随机等分为15份作为后续样本。在输入300个初始训练样本训练结束后,利用预留的检验样本进行检验并记录分类器精度,然后再投入一份后续样本(即100个训练样本)进行分类器训练,并在训练结束后检验分类器精度并记录,重复上述训练直至15份后续样本全部投入训练。分类器精度在不同规模样本训练下的表现如图6所示。
图6

从图6中可以看出: ①经过300个初始样本训练后的分类器精度能够达到88.9%,并且随着后续样本的输入训练,分类器呈现出积极的正向响应,分类器精度不断提高,但精度提升的速度不断下降,当后续样本输入到第6份时,即训练样本达到900个时,分类器精度达到最大值99.8%,且不再随着后续样本的增加而提高; ②非线性的支持向量机算法在小样本监督分类上表现良好,且对过拟合现象有着良好的抑制作用。基于上述结论,本文选择输入6份后续样本、训练精度达到99.8%的分类器进行后续实验,并对分类结果进行对比分析。
3 结果与分析
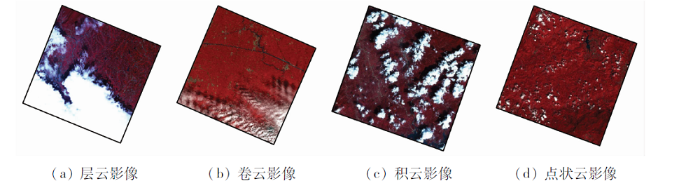
为了定量评价本文方法的精度与适用性,选取4景代表不同云层的影像数据进行验证实验。利用ArcGIS软件在4景影像上均随机生成500个检测样点,并对检测样点添加类别标签,利用生成的检验样点对本文方法识别结果与最大似然值和传统支持向量机的分类结果进行精度验证并进行对比分析,选取查准率、查全率和错误率作为衡量指标,各指标公式分别为:
式中: PR,RR和ER分别为查准率、查全率和错误率; TC为准确识别的云样点数; FA为识别为云的样点总数; TA为云样点的总数; FT为非云样点识别为云样点的总数; TF为云样点识别为非云样点的总数; NA为总样点数。
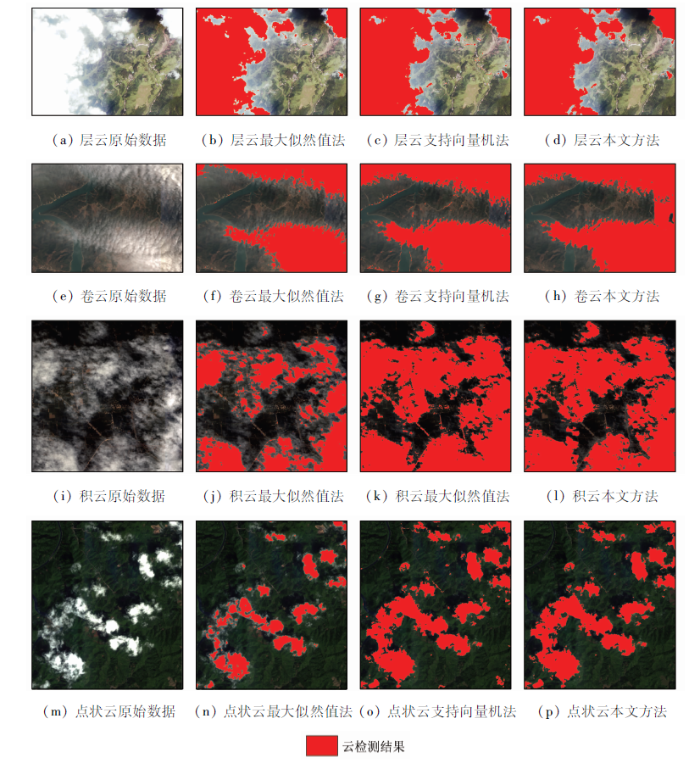
利用最大似然值算法、传统支持向量机算法和本文方法对4类云层进行检测识别,并采用上述衡量指标进行定量统计对比,具体结果如表4与图7所示。结合表4与图7分析可以得出,3种方法对不同云层的查准率均达到95%以上,其中对点状云和积云的查准率最高达到99%以上,这是因为点状云和积云大多属于厚云,光谱特征上表现较为明显。各方法查全率的表现上差异明显,最大似然值的查全率在58.1%~87.6%之间,波动较大,在卷云和层云的查全上表现最差,均低于70%,传统支持向量机算法的查全率在79.8%~90.2%之间,同样在层云和卷云的查全上表现低于平均水平,而本文方法在查全率上表现稳定,均达到93.9%以上,这是由于层云和卷云特殊的形态,多是中间为厚云,外围薄云环绕,并有着独特的纹理特征,最大似然值法和传统支持向量机算法在薄云检测上稍显不足,而本文方法引入纹理特征作为判读特征之一,所以能够较好地识别薄云。各方法在错误率的表现上,本文方法层云错误率控制在1.1%,其余都控制在1%以下,最大似然值的错误率在1.2%~9.2%之间,传统支持向量机算法的错误率在2.2%~4.3%之间,通过对比分析得出,错分主要出现在云层与不同透水层之间,这是因为二者具有相似的高反射光谱特征,而融入纹理特征的本文方法可以较好地解决这个问题; 本文方法最大错误率出现在层云识别上,是因为部分不透水层纹理比较平滑,与层云相似度较高。
表4 不同云检测方法精度对比
Tab.4
| 云层类型 | 衡量指标 | 最大似 然值法 | 传统支持 向量机法 | 本文 方法 | 平均 指标 |
|---|---|---|---|---|---|
| 层云 | PR | 95.5 | 97.9 | 99.2 | 97.5 |
| RR | 69.7 | 85.9 | 97.8 | 84.5 | |
| ER | 9.2 | 3.2 | 1.1 | 4.5 | |
| 卷云 | PR | 97.5 | 97.8 | 99.5 | 98.3 |
| RR | 58.1 | 79.8 | 96.3 | 78.1 | |
| ER | 8.4 | 4.3 | 0.7 | 4.5 | |
| 积云 | PR | 99.2 | 98.9 | 99.8 | 99.3 |
| RR | 87.6 | 89.5 | 93.9 | 90.3 | |
| ER | 1.7 | 2.2 | 0.5 | 1.5 | |
| 点状云 | PR | 99.6 | 99.7 | 99.8 | 99.7 |
| RR | 80.8 | 90.2 | 95.6 | 88.9 | |
| ER | 1.2 | 4.2 | 0.6 | 2.0 |
图7
4 结论
通过对国产高分一号数据进行特征分析,选取纹理特征与光谱特征并结合原始影像作为分类基础,获取规格化瓦片并对其添加标签,作为分类样本,利用非线性支持向量机在小样本分类上的优势,通过不断训练参数构建合理的分类器用于云层检测。
1)本文方法加入图像特征,在一定程度上弥补了依靠单一的光谱信息或纹理特征进行分类识别精度较低的不足,如利用卷云等高层云纹理特征明显的特点,结合纹理特征进行云检测,解决了高分一卫星数据缺少对卷云等高层云敏感的1.375 μm通道造成的检测精度不足的问题。同时分类器训练完成后,能够有较好的普适性,可以重复利用。
2)利用该方法对含有不同类型云层的高分一号8 m影像进行云检测。在一定程度上丰富了国产高分卫星多光谱数据云检测的方式方法。同时,对于其他波段较少的多光谱数据云检测研究具有一定的借鉴意义。
3)结果表明本文方法相较于传统的支持向量机和最大似然值有着明显的优势,对云层信息提取效果良好,查准率与查全率均保持在93.9%以上,错误率控制在1.1%以下,对卷云等具有明显纹理特征的云层识别效果十分突出,对薄云的识别精度也得到了很大的提升。
当然,本文方法仍有综合优化法存在的普遍问题,计算量较大,检测耗时较长。后续将针对此问题进行深入研究,结合运算量较少的物理阈值法,剔除明确非云像元的方式来减少计算量,提高检测效率。
参考文献
遥感图像云检测方法研究进展
[J].
A review of cloud detection methods in remote sensing images
[J].
增强型多时相云检测
[J].
Enhanced multi-temporal cloud detection algorithm for optical remote sensing images
[J].
基于边缘特征和AdaBoost分类的遥感影像云检测
[J].传统遥感图像云检测方法在处理山地、雪地、暗云等场景时极易发生错判,准确度较低。通过对遥感图像中云与地物的不同特点进行分析,提出一种新的遥感图像边缘特征描述方法,结合图像的边缘特征和灰度特征使用AdaBoost分类器进行云图分类,并利用图像的空间相关性对分类结果进行修正。经10万余幅图像测试结果表明:该算法与传统算法相比准确度极大提高,正确率达到96%以上,且运算速度快,满足实时性要求。
Cloud detection for remote sensing image based on edge features and AdaBoost classifier
[J].Cloud cover is an important factor that degrades the quality of remote sensing images.Generally,traditional cloud detection algorithms can not work effectively in scenes such as mountains,snow and dark clouds,thus resulting in lower detection precision.In this paper,we analyzed the difference of characteristics between cloud area and earth object,then defined a new edge feature descriptor,and lastly proposed a new cloud detection algorithm based on image block classification.The edge features and gray features are extracted and classified by the AdaBoost classifier,and the result is corrected by using spatial neighbouring correlation.More than 100 thousand image blocks experiment shows that this algorithm has much better performance than traditional algorithms.To be specific,the accuracy is more than 96% and the operation is so fast that real-time requirement can be ensured.
Enhancing a simple MODIS cloud mask algorithm for the Landsat data continuity mission
[J].
DOI:10.1109/TGRS.2012.2203823
URL
[本文引用: 1]

The upcoming Landsat Data Continuity Mission (LDCM) will include new channels centered around 1.38 mu m and 12 mu m. This work studies the potential impact of these new channels on LDCM's cloud detection capabilities by using MODerate resolution Imaging Spectroradiometer (MODIS) data as a proxy. Thresholds for the 1.38 mu m band and the so-called "split window" technique (using the brightness temperature difference of bands centered at 11 mu m and 12 mu m) are derived using atmospheric profiles from the ECMWF ERA-40 reanalysis and a MODIS-band radiance simulator. The thresholds are incorporated into a previously published cloud mask scheme and applied on low-and mid-latitude (60 degrees S to 60 degrees N) MODIS radiance data from two different days, six months apart. While the previous scheme yields agreement rates to the MODIS cloud mask just below 80%, the addition of the 1.38 mu m and split window tests increases the agreement by 7-9%. The earlier scheme is still appropriate for cloud masking of historical Landsat images and for carrying consistent cloud detection into the future. The enhanced scheme of this paper, on the other hand, with its improved masking of primarily high thin clouds, can be either used independently or combined with other masking techniques for generating reliable LDCM cloud mask products that can potentially include confidence indicators based on the degree of agreement between multiple cloud masks.
基于分形维数的全色影像云雪自动识别方法
[J].由于云、雪光谱特征在可见光谱段范围内的相似性,全色影像的云检测和云雪识别一直是对地观测遥感数据预处理及应用中的难点之一。细致分析了云、雪的纹理特征,通过训练大量的实验样本获得了表征云、雪纹理特征的分形维数值的统计规律,在此基础上综合考虑云\,雪的纹理特征与覆盖分布规律,提出了一种基于分形维数的全色影像云与积雪自动识别方法。利用"北京一号"小卫星实际图像的测试结果表明,该方法是一种有效的全色影像云\,雪自动识别方法。
Automatic identification of cloud and snow based on fractal dimension
[J].The similarity of spectral feature in visible/near-infrared band between cloud and snow has been an important influence which degrades the recognition accuracy of cloud and snow,especially the panchromatic images.In this paper,a novel and feasible method was presented to automatically identify cloud and snow from panchromatic images.The method made full use of two different analytical techniques:the spectrum threshold segmentation and the texture analysis.These two approaches discriminated the image from two different aspects.At first,the cloud or snow was distinguished from the background utilizing the difference of spectral feature,so the proportion of cloud or snow in the image was got.And then the samples’ fractal dimension which could reflect the texture feature of cloud and snow from an image were calculated to get the distribution of the fractal dimension values.At last,by comparing the proportion with the distribution,the automatic identification of cloud and snow was realized.The experimental results of the actual panchromatic images by Beijing-1 indicate the feasibility and accuracy of the method.The method could be also applied for other high-resolution panchromatic images because of the universality of the texture feature.
Automated detection of cloud and cloud shadow in single-date Landsat imagery using neural networks and spatial post-processing
[J].DOI:10.3390/rs6064907 URL [本文引用: 1]
Physical and statistical approaches for cloud identification usingmeteosat second generation-spinning enhanced visible and infrared imager data
[J].DOI:10.1016/j.rse.2008.01.015 URL [本文引用: 2]
面向城市区域的遥感影像云检测方法
[J].
Cloud detection method for remote sensing image in urban area
[J].
采用单时相法的高分一号数据云/阴影检测
[J].
Cloud and cloud shadow detection in GF-1 imagery using single-date method
[J].
资源三号测绘卫星自动云检测
[J].
DOI:10.11947/j.AGCS.2015.20130384
URL
[本文引用: 1]
光学卫星遥感影像自动云检测是卫星产品生产系统的一个重要环节.利用资源三号卫星编目生成的浏览图,采用树状判别结构进行云检测,对浏览图进行分块,提取子块图像的特征进行云地分类.由于云类和地物类过于繁杂,且浏览图的分辨率较低,传统通过图像特征对云地进行分类的算法有很大的局限性,针对这一问题,本文提出了在分类之前对原始的子块图像进行增强处理,扩大云和地物的纹理差异,然后以二阶矩、一阶差分等作为云地分类的图像特征,并在多尺度空间内进行特征延拓,经过综合分析估计云在影像中的比例.该云检测算法应用于资源三号卫星应用系统工程,实际测试结果表明,该算法能够较好地提升云量检测的准确率.
An automatic cloud detection method for ZY-3 satellite
[J].
DOI:10.11947/j.AGCS.2015.20130384
URL
[本文引用: 1]
Automatic cloud detection for optical satellite remote sensing images is a significant step in the production system of satellite products. For the browse images cataloged by ZY-3 satellite, the tree discriminate structure is adopted to carry out cloud detection. The image was divided into sub-images and their features were extracted to perform classification between clouds and grounds. However, due to the high complexity of clouds and surfaces and the low resolution of browse images, the traditional classification algorithms based on image features are of great limitations. In view of the problem, a prior enhancement processing to original sub-images before classification was put forward in this paper to widen the texture difference between clouds and surfaces. Afterwards, with the secondary moment and first difference of the images, the feature vectors were extended in multi-scale space, and then the cloud proportion in the image was estimated through comprehensive analysis. The presented cloud detection algorithm has already been applied to the ZY-3 application system project, and the practical experiment results indicate that this algorithm is capable of promoting the accuracy of cloud detection significantly.
结合超像素和卷积神经网络的国产高分辨率遥感影像云检测方法
[J].
Cloud detection for Chinese high resolution remote sensing imagery using combining superpixel with convolution neural network
[J].
Characterization of the Landsat-7 ETM+ automated cloud-cover assessment (ACCA) algorithm
[J].DOI:10.14358/PERS.72.10.1179 URL [本文引用: 1]
Object-based cloud and cloud shadow detection in Landsat imagery
[J].DOI:10.1016/j.rse.2011.10.028 URL [本文引用: 1]
Design-based texture feature fusion using Gabor filters and co-occurrence probabilities
[J].
An introduction to support vector machines and other kernel-based learning methods
[M].

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}