0 引言
随着遥感技术的发展,可利用的遥感数据越来越多,但是遥感数据的获取因受技术等条件限制其空间分辨率和时间分辨率往往不能同时兼优 [1 ,2 ,3 ,4 ,5 ] 。以MODIS数据为例,虽然使用MODIS数据每天都可以对全球任意区域进行观测,也更容易获取无云区的影像,但是由于其空间分辨率较低,不足以全面反映地表覆被空间分布状况[6 ] 。Landsat数据兼具时间分辨率和空间分辨率的优势,得到了广泛的应用,但是由于受云雨天气的影响,数据的可用性将大大降低[7 ] ,这进一步影响了该数据在土地利用、覆被制图及动态变化监测等方面的应用[8 ] 。
解决上述问题的方法之一就是将不同传感器获取的具有不同时、空分辨率特征的数据进行融合,生成同时具备高时间分辨率和高空间分辨率的遥感数据[9 ,10 ,11 ,12 ,13 ,14 ] 。围绕这一目标,国内外学者展开了一系列研究,Gao等[15 ] 于2006年提出的一种时空自适应反射融合模型(spatial and temporal adaptive reflectance fusion model,STARFM)方法,其基本原理是利用同一时期的Landsat TM和MODIS数据以及另一时期的MODIS数据,通过滑动窗口内相似像元值加权计算得到另一时期的Landsat TM数据。STARFM通常能够融合生成与真实影像高度一致的预测影像,但该方法在初期高空间分辨率影像上没有记录地物发生的突变信息。针对该问题,Hilker等[16 ] 通过加入从MODIS影像上提取的地物突变时间信息作为判断条件,若预测期在突变日期之前,则选择初期的高空间分辨率影像作为基期影像; 否则选择末期的高空间分辨率影像,制定了对于基期影像的选择标准,从而得到了更加准确的预测期影像。Zhu等[17 ] 提出了一种增强型STARFM(enhanced STARFM,ESTARFM)方法,该方法采用2个时刻的遥感影像作为基础数据,通过计算滑动窗口内某像元高空间分辨率与低空间分辨率的值之间的相关系数指标,改进了原方法中对像元纯度的判断规则以及对光谱距离的计算方法,从而使得新方法对地形破碎地区具有更好的适用性。除上述基于STARFM的几种方法外,Zurita-Milla等[18 ] 基于线性光谱混合模型,提出了一种利用高精度土地利用图对低空间分辨率影像进行混合像元分解,以得到高时空分辨率遥感数据的方法。该方法对整景低空间分辨率影像进行一次性分解,对于同一类别的所有高空间分辨率像元仅能获得同一个反射率值,这样的策略显然没有充分考虑端元平均反射率的空间异质性。有学者[19 ,20 ] 考虑在分解时加入空间距离或光谱距离进行加权,以提高分解精度; 但是受方法自身缺陷所限,这些方法都只能获得类别的平均反射率。为了改善这一问题,Zhang等[21 ] 提出了一种增强型的时空融合模型(enhanced spatial and temporal data fusion model,ESTDFM),该方法基于ISODATA分类法对2景高空间分辨率影像进行分类,利用滑动窗口技术对3期低空间分辨率影像进行混合像元分解; 对得到的2个预测影像加权求和,得到最终的高空间分辨率预测影像。虽然该方法取得了较高精度的预测期影像,但并未考虑高空间分辨率和低空间分辨率影像中纯净地物的光谱特征差异,即在不同传感器下相同地物反射率不同; 并且对端元反射率进行混合像元分解时,采用了无约束最小二乘法。因此,该方法计算的结果将会产生一定的误差。
为了解决这一问题,本文将通过统计不同类别地物端元反射率变化,采用粒子群优化(particle swarm optimization,PSO)方法对窗口内的低空间分辨率的影像进行混合像元分解,计算窗口内相似像元相关系数及高、低空间分辨率像元之间的缩放系数,进而将2期计算结果进行时间加权来计算预测期高空间分辨率影像。旨在更充分地考虑类别反射率变化值的空间差异性,从而更符合自然地物变化的实际情况,同时也降低因传感器不同造成的系统误差。
1 研究方法
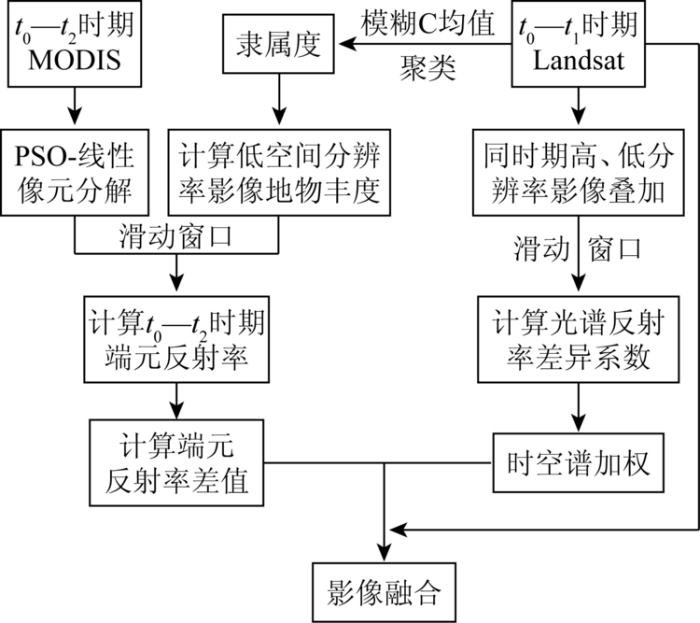
ESTDFM方法是在忽略不同传感器之间几何误差及大气误差的前提下,认为高空间分辨率像元之间的反射率变化等价于低空间分辨率像元对应端元的反射率变化,因此,ESTDFM方法采用滑动窗口技术对低空间分辨率影像进行线性混合像元分解,基于无约束最小二乘法求解窗口内不同端元反射率,考虑到端元反射率的实际物理意义,无约束最小二乘求解会导致结果存在一定的误差。因此,本文在ESTDFM方法的基础上,通过统计不同端元反射率变化范围,将PSO方法应用于端元反射率求解过程中,综合考虑高低空间分辨率影像之间的端元反射率差异及时空权重,进一步提高遥感影像融合精度,具体流程如图1 所示,图中t 0 ,t 1 和t 2 分别表示影像获取的不同时期,该方法主要包括丰度矩阵提取、端元反射率求解和时空谱加权融合生成影像3个关键步骤。
图1
图1
技术流程
Fig.1
Technical flow chart
1.1 基于模糊C均值的丰度图像提取
为了能够获取低空间分辨率影像中各类地物的反射率信息,首先用模糊C均值对t 时期的高空间分辨率影像进行非监督分类。模糊C均值属于非监督分类,它是通过聚类中心计算每一像元的隶属度,并再次更新聚类中心,经多次迭代直至收敛。利用模糊C均值计算各像元的隶属度,以隶属度作为高空间分辨率影像中各类地物所占的比例,通过统计低空间分辨率像元下各类别的比例,可以计算出低空间分辨率影像中各类地物的丰度图像。低空间分辨率影像中各类别的比例统计公式为:
(1) f k l = ∑ n N k f k h ( n ) / N k
式中: f k l k N k k f k h ( n ) n k
1.2 PSO求解端元反射率
在忽略高空间分辨率和低空间分辨率影像之间几何误差和大气校正误差的情况下,低空间分辨率的像元在第 b C ( b )
(2) C ( b ) = ∑ k = 1 c f k l C em ( k , b ) + ε
式中: C em ( k , b ) k b ε
受不同环境的影响,相同地物端元反射率在空间上是变化的,但式(2)中并未考虑像元端元反射率的空间可变性。因此,通过引入滑动窗口技术,利用窗口的移动对窗口内像元值进行分解,使得在窗口移动的过程中各类地物的端元反射率值总是变化的,其中窗口内各端元反射率值可以通过邻近低空间分辨率影像像元提供的信息,建立线性方程组,即
(3) C ( 1 , b ) ︙ C ( i , b ) ︙ C ( n , b ) = f 1 l ( 1 ) ︙ f 1 l ( i ) … f k l ( 1 ) … ︙ … f k l ( i ) … f c l ( 1 ) ︙ f c l ( i ) ︙ ︙ ︙ f 1 l ( n ) … f k l ( n ) … f c l ( n ) C em ( 1 , b ) ︙ C em ( k , b ) ︙ C em ( c , b ) + η 1 ︙ η i ︙ η n
式中: n 为窗体内低空间分辨率影像像元个数,且满足 n ≥ c + 1 η μ k σ k
(4) μ k - α σ k < C em ( k , b ) < μ k + α σ k
通常情况下求解上述方程比较困难。为了寻求全局最优解,本文采用PSO方法,通过群体中个体之间的协作和信息共享来求解各类端元的反射率。粒子在可行解空间中不断运动并计算适应度函数值,粒子具有速度和位置2种属性,其中速度V 和位置X 更新方程[22 ] 为:
(5) V id m + 1 = δ V id m + λ 1 random ( 0,1 ) ( P id m - X id m ) + λ 2 random ( 0,1 ) ( P gd m - X id m )
(6) X id m + 1 = X id m + V id m + 1
式中: δ [ 0,1 ] λ 1 λ 2 X id m m 时刻的位置; P id m m 时刻个体最佳位置; P gd m m 时刻全局最佳位置。
根据PSO方法可以对每个位置(C em (k ,b ))计算适应度函数值,根据速度的不断更新迭代计算全局最优解。
1.3 光谱反射率差异系数计算
由于传感器成像导致的差异,使得遥感影像数据之间存在一定程度的误差,导致不同传感器对应的地物端元反射率也不相同,因此,可以把不同空间分辨率下相同类别的纯净端元反射率关系用一种线性模型来表示,即
(7) F em ( x i , y j , t , b ) = a C em ( x i , y j , t , b ) + ε '
式中: C em F em ( x i , y j ) t 为时刻; b 为波段; a 为比例因子; ε '为系统误差项。
已知 t 0 t 1 2 个时刻高、低空间分辨率影像,假设2个时刻地表覆盖类型及传感器导致的系统误差不变,那么根据式(7)可以得到
(8) F em ( x i , y j , t 1 , b ) - F em ( x i , y j , t 0 , b ) = a [ C em ( x i , y j , t 1 , b ) - C em ( x i , y j , t 0 , b ) ]
对于高空间分辨率影像,假设 t 0 t 1 ( x i , y j ) 位置的地物类型不发生改变,则2个时刻像元光谱反射率变化等价于端元反射率变化,即
(9) F ( x i , y j , t 1 , b ) - F ( x i , y j , t 0 , b ) = a [ C em ( x i , y j , t 1 , b ) - C em ( x i , y j , t 0 , b ) ]
上述公式只是根据单个像元预测高空间分辨率影像,并未考虑像元之间的空间邻域关系。因此,采用一种滑动窗口技术,通过在高、低空间分辨率图像内引入一个w ×w 大小的窗口,在滑动窗口内筛选与中心位置相似的像元,利用相似像元进行加权计算中心像元反射率变化。首先对高空间分辨率影像进行分类,获得与中心像元相似的像元索引; 然后计算每一个索引处的相似度,对于相似度较大的像元赋予较大的权重值,对于相似度较小的像元赋予较小的权重,最终加权计算中心像元反射率,即
(10) F ( x w / 2 , y w / 2 , t 1 , b ) = F ( x w / 2 , y w / 2 , t 0 , b ) + a ( x w / 2 , y w / 2 ) ∑ i = 1 N [ ω i Δ C em ( x i , y i , t 0 , t 1 , b ) ]
式中 ω i ω i
(11) ω i = D i / ∑ i = 1 N D i
(12) D i = r i d i
(13) d i = 1 + ( x w / 2 - x i ) 2 + ( y w / 2 - y i ) 2 ( w / 2 )
(14) r i = min F ( x i , y i , t 0 , b ) C ( x i , y i , t 0 , b ) , C ( x i , y i , t 0 , b ) F ( x i , y i , t 0 , b )
式中: w x w / 2 , y w / 2 ) 为高空间分辨率影像下的窗体中心坐标; ( x i , y i ) d i r i i
为了提高计算精度,本文对2期预测的数据进行权重计算,使预测结果在时间上更加合理。计算公式为:
(15) F ( x w / 2 , y w / 2 , t p , b ) = [ T m F m ( x w / 2 , y w / 2 , t m , b ) + T n F n ( x w / 2 , y w / 2 , t n , b ) ] / ( T m + T n )
式中: F m ( x w / 2 , y w / 2 , t m , b ) F n ( x w / 2 , y w / 2 , t n , b ) t m t n t p T m T n T m T n
(16) T = 1 / ∑ i=0 w ∑ i=0 w C ( i , j , t , b ) - ∑ i=0 w ∑ i=0 w C ( i , j , t p , b )
2 实验
2.1 遥感数据及研究区选择
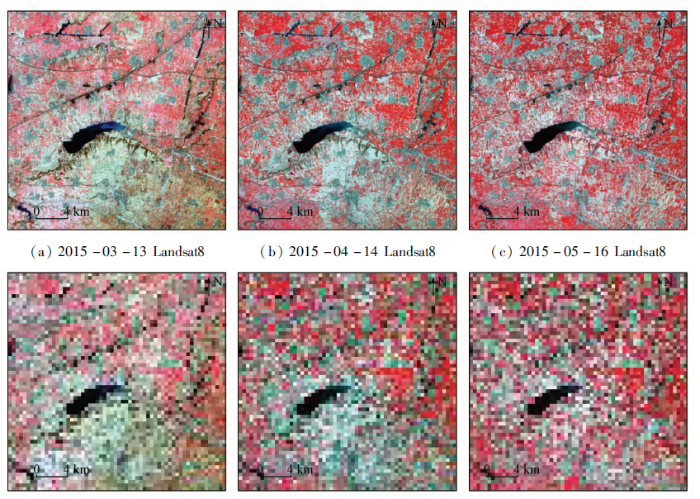
本文选择3个时期获取的空间分辨率为30 m的Landsat8数据,以及对应的同一时期获取的空间分辨率为500 m的日反射率产品MOD09GA数据,获取日期分别为2015年3月13日、2015年4月14日、2015年5月16日,其中以2015年3月13日、2015年4月14日2期影像为实验影像,2015年5月16日为所预测的参考影像; 并采用Hadhoud等[23 ] 提出的权重双线性插值法对MODIS数据进行插值计算。截取MODIS和Landsat8影像重叠区域作为实验研究区(图2 )。该区域地物类型丰富,其中主要有植被、耕地、河流、裸地及城镇用地等。
图2
图2
研究区近红外、红光、绿光波段标准假彩色影像
Fig.2
Study area of standard false color in near infrared, red and green bands
2.2 最优参数选择
对遥感影像时空融合方法中敏感性参数进行研究,并确定合理的参数。在方法中有2个参数对结果的影响较大,一个是影像的分类数目,另一个是窗口的大小。预测窗口中心像元值需要邻近像元作为辅助信息,不同的分类数目和窗口大小会导致不同的相似像元数量和时间权重,这也是保证预测精度的关键。因此,本文利用常用的影像分解效果综合评价指标“相对无量纲全局误差”(erreur relative global adimensionnelle de synthese,ERGAS)[24 ,25 ] 对方法的最优参数进行筛选。ERGAS 计算公式为:
(17) ERGAS = 100 h l 1 n ∑ i = 1 n ( RMS E i 2 / M i 2 )
式中: h 为高空间分辨率影像的空间分辨率; l 为低空间分辨率影像的空间分辨率; n 为影像的波段数目; RMS E i i 波段的均方根误差(root mean square error,RMSE); M i i 波段的均值。式中 ERGAS
为了获取方法中的最优分类数目和窗口大小,本文选择了2个指标( ERGA S l ERGA S h ) 对最优参数组合(分类数目和邻域窗口大小)进行筛选(图3 ),其中 ERGA S l ERGAS ERGA S h ERGAS
图3
图3
ERGA S h ERGA S l
Fig.3
Change of ERGA S h ERGA S l
从图3 可以看出,不同的参数组合呈现出完全相反的趋势: 如当分类数目为5时,随着窗口大小的增加(3~15), ERGA S h ERGA S l ERGA S l
2.3 评价方法
为了更好地对结果进行分析,本文采用3种方法从不同角度对本文方法与ESTDFM方法进行对比分析: ①目视评价,将预测的影像和实际影像进行目视对比,从而判断2种方法预测效果; ②二维散点图,将实际影像和预测影像组成二维空间散点,并计算相关系数,根据相关系数是否为1或者散点是否靠近标准线(1∶1线)来判断预测效果; ③根据多个指标来评价,包括RMSE、决定系数(R 2 )、误差均值 (average difference,AD)和结构相似度(the measure of structural similarity, SSIM)等,其中RMSE用来衡量预测反射率和实际反射率之间的差异; R 2 则表示预测值和实际值之间的线性关系; AD可以定量比较预测影像与实际影像之间的正负偏向,AD为正说明预测值偏大,反之则偏小; SSIM用来评价影像之间整体结构的相似程度,计算公式为:
(18) SSIM = ( 2 μ X μ Y + C 1 ) ( 2 σ XY + C 2 ) ( μ X 2 + μ Y 2 + C 1 ) ( σ X + σ Y + C 2 )
式中: μ X μ Y σ X σ Y σ XY C 1 C 2 SSIM
3 结果与分析
本文方法与ESTDFM方法预测的2015年5月16日结果如图4 所示。选取典型影像区域(红色方框),放大后进行比较,从中可以看出,利用 ESTDFM方法计算得到的水体呈深蓝色,植被呈红偏粉色调,与实际影像相比颜色偏浅; 而利用本文提出的方法计算得到的水体和植被更接近实际值。但是也存在一些差异,实际影像中植被颜色较深,而利用这2种方法计算得到的影像植被颜色均较浅,或部分区域已变成裸地; 但通过整体观察比较可以发现,本文方法保留了更多的空间细节,预测结果优于原始影像和ESTDFM方法的计算结果。
图4
图4
近红外、红光、绿光合成标准假彩色融合结果
Fig.4
Results of standard false fusion in near infrared, red and green bands
图5 示出2015年5月16日获取的Landsat8实际影像在近红外、红光、绿光波段的反射率与利用ESTDFM方法及本文方法计算的反射率之间的二维散点图。
图5
图5
近红外、红光、绿光波段预测值与观测值的二维散点图
Fig.5
Scatter diagram of predicted and observed values in near infrared, red and green bands
从图5 可以看出,各散点图中的散点都位于1∶1线附近,说明2种方法都能较好地对未知影像数据进行预测。但在窗口大小固定的情况下,本文方法与实际影像的相关性更强,散点更接近于1∶1线,而ESTDFM方法预测的结果偏低,即大部分位于1∶1线以下,因此本文方法较原始ESTDFM方法更优。2种方法精度的详细评估见表1 。从表1 可以看出,2种方法预测影像的RMSE都较小,说明2种方法对于影像的预测效果都较好。但ESTDFM方法预测影像的AD均小于0,预测值相对于实际值偏小; 而本文方法在绿光和近红外波段反射率偏大(AD =0.000 72和AD =0.002 90),在红光波段反射率偏小(AD =-0.006 20)。为进一步分析预测影像和实际影像之间的差异,通过观察RMSE发现,在绿光、红光和近红外波段本文方法相比于ESTDFM方法误差更低; 就R 2 而言,本文预测影像与实际影像的线性关系比ESTDFM方法更强; 从SSIM可以看出,本文方法预测的影像与实际影像相似程度更大,可以更好地反映地物的细节变化。因此,从不同比较方案中均可看出,本文方法的优越性更突出,相比于ESTDFM方法计算结果更加准确。
4 结论与建议
本文提出一种基于线性混合像元分解模型的遥感影像时空融合方法,利用滑动窗口技术和粒子群优化方法对低空间分辨率影像进行端元反射率求解,计算窗口内光谱反射率差异系数,并对2期预测影像进行时间加权计算,得出如下结论:
1)由于每个低空间分辨率像元内各类别的反射率值都不相同,利用滑动窗口技术和粒子群优化方法对窗口内低空间分辨影像的端元反射率进行求解,并将分解结果赋予中心像元值,就能更充分地考虑类别反射率变化值的空间差异性,从而更符合自然地物变化的实际情况。
2)利用滑动窗口技术可动态改变光谱反射率差异系数。但由于重采样之后的大部分像元值与高空间分辨率像元值相关性极小,通过相关系数权重对差异系数进行修正,可使得预测结果更好地适应真实影像,地物的细节变化更加突出。
应当指出,本文所建立的时空融合方法有一定的假设基础,虽然有一定的合理性,但也存在一定误差。例如假设地物之间端元反射率呈线性变化,但在实际中地物类型复杂多样,受多种因素共同影响往往呈现出的非线性变化以及像元间的非线性混合现象等是融合误差的主要来源。因此,需要研究更加完善的模型假设,以便进一步提高模型的适用性和精度。
参考文献
View Option
[1]
邬明权 , 王洁 , 牛铮 , 等 . 融合MODIS与Landsat数据生成高时间分辨率Landsat数据
[J]. 红外与毫米波学报 , 2012 ,31 (1 ):80 -84 .
[本文引用: 1]
Wu M Q Wang J Niu Z , et al . A model for spatial and temporal data fusion
[J]. Journal of Infrared and Millimeter Waves , 2012 ,31 (1 ):80 -84 .
[本文引用: 1]
[2]
杨军明 , 吴昱 , 魏永霞 , 等 . 多源数据融合的高时空分辨率植被指数生成
[J]. 遥感学报 , 2019 ,23 (5 ):935 -943 .
[本文引用: 1]
Yang J M Wu Y Wei Y X , et al . A model for the fusion of multi-source data to generate high temporal and spatial resolution VI data
[J]. Journal of Remote Sensing , 2019 ,23 (5 ):935 -943 .
[本文引用: 1]
[3]
Gevaert, C M Garcia-Haro, F J . A comparison of STARFM and an unmixing-based algorithm for Landsat and MODIS data fusion
[J]. Remote Sensing of Environment , 2015 ,156 (1 ):34 -44 .
[本文引用: 1]
[4]
董文全 , 蒙继华 . 遥感数据时空融合研究进展及展望
[J]. 国土资源遥感 , 2018 ,30 (2 ):1 -11 .doi: 10.6046/gtzyyg ,2018.02.01.
[本文引用: 1]
Dong W Q Meng J H . Review of spatiotemporal fusion model of remote sensing data
[J]. Remote Sensing for Land and Resources , 2018 ,30 (2 ):1 -11 .doi: 10.6046/gtzyyg ,2018.02.01.
[本文引用: 1]
[5]
杨敏 , 杨贵军 , 陈晓宁 , 等 . 基于FSDAF方法融合生成高时空分辨率地表温度
[J]. 国土资源遥感 , 2018 ,30 (1 ):54 -62 .doi: 10.6046/gtzyyg.2018.01.08 .
[本文引用: 1]
Yang M Yang G J Chen X N , et al . Generation of land surface temperature with high spatial and temporal resolution based on FSDAF method
[J]. Remote Sensing for Land and Resources , 2018 ,30 (1 ):54 -62 .doi: 10.6046/gtzyyg.2018.01.08 .
[本文引用: 1]
[6]
Meng J H Wu B F Du X , et al . Method to construct high spatial and temporal resolution NDVI dataset-STAVFM
[J]. Journal of Remote Sensing , 2011 ,15 (1 ):44 -59 .
DOI:10.11834/jrs.20110104
URL
[本文引用: 1]
To combine the high spatial resolution of Landsat and high temporal resolution of MODIS data, We selected an 18km?18 km study area in upper reaches of Guanting reservoir. A new method―Spatial and Temporal Adaptive vegetation indexFusion Model (STAVFM) for blending NDVI of different spatial and temporal resolutions to produce high temporal-spatialresolution NDVI dataset has been developed based on STARFM (Spatial and Temporal Adaptive Reflectance Fusion Model).STAVFM defined a time window according to the temporal variation of vegetation, put the vegetation phenophase intoconsideration and improve the temporal weighting algorithm. The result shows that the new method can combine the temporalinformation of MODIS NDVI and spatial difference information of ETM NDVI and can predict the missed ETM NDVI with ahigh accuracy (the correlation coefficients of three pairs of observed and predicted ETM NDVI are 0.82, 0.90 and 0.91). A hightemporal and high spatial resolution NDVI dataset is constructed, which maintains the temporal trend of high temporalresolution data and the detailed spatial difference information of high spatial resolution data.
[7]
Alysha D P . MODIS-based change detection for Grizzly Bear habitat mapping in Alberta
[J]. Photogrammetric Engineering and Remote Sensing , 2008 ,74 (8 ):973 -985 .
DOI:10.14358/PERS.74.8.973
URL
[本文引用: 1]
[8]
Ju J Roy D P . The availability of cloud-free Landsat ETM+ data over the conterminous United States and globally
[J]. Remote Sensing of Environment , 2008 ,112 (3 ):1196 -1211 .
[本文引用: 1]
[9]
黄波 , 赵涌泉 . 多源卫星遥感影像时空融合研究的现状及展望
[J]. 测绘学报 , 2017 (10 ):294 -301 .
[本文引用: 1]
Huang B Zhao Y Q . Research status and prospect of spatiotemporal fusion of multi-source satellite remote sensing imagery
[J]. Acta Geodaetica et Cartographica Sinica , 2017 (10 ):294 -301 .
[本文引用: 1]
[10]
魏然 , 单杰 . 城市地表温度影像时空融合方法研究
[J]. 武汉大学学报(信息科学版) , 2018 ,43 (3 ):428 -435 .
[本文引用: 1]
Wei R Shan J . Spatial and temporal fusion for urban land surface temperature image mapping
[J]. Geomatics and Information Science of Wuhan University , 2018 ,43 (3 ):428 -435 .
[本文引用: 1]
[11]
Marfai M A Almohammad H Dey S . Coastal dynamic and shoreline mapping:Multi-sources spatial data analysis in Semarang Indonesia
[J]. Environmental Monitoring and Assessment , 2008 ,142 (1 ):297 -308 .
[本文引用: 1]
[12]
Arai E Shimabukuro Y E Pereira G . A multi-resoluticm multi-temporal technique for detecting and mapping deforestation in the Brazilian Amazon rainforest
[J]. Remote Sensing , 2011 ,3 (9 ):1943 -1956 .
[本文引用: 1]
[13]
Huang B Zhang H . Spatio-temporal reflectance fusion via unmixing:Accounting for both phenological and land-cover changes
[J]. International Journal of Remote Sensing , 2014 ,35 (16 ):6213 -6233 .
[本文引用: 1]
[14]
Song H Huang B . Spatiotemporal satellite image fusion through one-pair image learning
[J]. IEEE Transactions on Geoscience and Remote Sensing , 2013 ,51 (4 ):1883 -1896 .
[本文引用: 1]
[15]
Gao F Masek J Schwaller M . On the blending of the Landsat and MODIS surface reflectance:Predicting daily Landsat surface reflectance
[J]. IEEE Transactions on Geoscience and Remote Sensing , 2006 ,44 (8 ):2207 -2218 .
DOI:10.1109/TGRS.2006.872081
URL
[本文引用: 1]
[16]
Hilker T Wulder M A Coops N C . A new data fusion model for high spatial-and temporal-resolution mapping of forest disturbance based on Landsat and MODIS
[J]. Remote Sensing of Environment , 2009 ,113 (8 ):1613 -1627 .
DOI:10.1016/j.rse.2009.03.007
URL
[本文引用: 1]
[17]
Zhu X L Chen J Gao F . An enhanced spatial and temporal adaptive reflectance fusion model for complex heterogeneous regions
[J]. Remote Sensing of Environment , 2010 ,114 (11 ):2610 -2623 .
DOI:10.1016/j.rse.2010.05.032
URL
[本文引用: 1]
[18]
Zurita-Milla R Clevers J Schaepman M E . Unmixing-based Landsat TM and MERIS FR data fusion
[J]. IEEE Geoscience and Remote Sensing Letters , 2008 ,5 (3 ):453 -457 .
[本文引用: 1]
[19]
Maselli F . Definition of spatially variable spectral endmembers by locally calibrated multivariate regression analyses
[J]. Remote Sensing of Environment , 2001 ,75 (1 ):29 -38 .
[本文引用: 1]
[20]
Busetto L Meroni M Colombo R . Combining medium and coarse spatial resolution satellite data to improve the estimation of sub-pixel NDVI time series
[J]. Remote Sensing of Environment , 2008 ,112 (1 ):118 -131 .
[本文引用: 1]
[21]
Zhang W Li A N Jin H A . An enhanced spatial and temporal data fusion model for fusing Landsat and MODIS surface reflectance to generate high temporal Landsat-like data
[J]. Remote Sensing , 2013 ,5 (10 ):5346 -5368 .
DOI:10.3390/rs5105346
URL
[本文引用: 1]
[22]
张兵 , 孙旭 , 高连如 , 等 . 一种基于离散粒子群优化算法方法的高光谱图像端元提取方法
[J]. 光谱学与光谱分析 , 2011 ,31 (9 ):2455 -2461 .
[本文引用: 1]
Zhang B Sun X Gao L R , et al . A method of endmember extraction in hyperspectral remote sensing images based on discrete particle swarm optimization
[J]. Spectroscopy and Spectral Analysis , 2011 ,31 (9 ):2455 -2461 .
DOI:10.3964/j.issn.1000-0593(2011)09-2455-07
URL
[本文引用: 1]
For the inaccuracy of endmember extraction caused by abnormal noises of data during the mixed pixel decomposition process, particle swarm optimization (PSO), a swarm intelligence algorithm was introduced and improved in the present paper. By re-defining the position and velocity representation and data updating strategies, the algorithm of discrete particle swarm optimization (D-PSO) was proposed, which made it possible to search resolutions in discrete space and ultimately resolve combinatorial optimization problems. In addition, by defining objective functions and feasible solution spaces, endmember extraction was converted to combinatorial optimization problem, which can be resolved by D-PSO. After giving the detailed flow of applying D-PSO to endmember extraction and experiments based on simulative data and real data, it has been verified the algorithm's flexibility to handle data with abnormal noise and the reliability of endmember extraction were verified. Furthermore, the influence of different parameters on the algorithm's performances was analyzed thoroughly.
[23]
Hadhoud M M Dessouky M I El-Samie F E A , et al . Adaptive image interpolation based on local activity levels
[C]// Proceedings of the Twentieth National Radio Science Conference . IEEE , 2003 :C4 -1 .
[本文引用: 1]
[24]
Wald L . Data fusion,definitions and architectures:Fusion of images of different spatial resolutions
[M]. Pressesdes MINES , 2002 .
[本文引用: 1]
[25]
Zhu X L Helmer E H Gao F . A flexible spatiotemporal method for fusing satellite images with different resolutions
[J]. Remote Sensing of Environment , 2016 ,172 (1 ):165 -177 .
[本文引用: 1]
融合MODIS与Landsat数据生成高时间分辨率Landsat数据
1
2012
... 随着遥感技术的发展,可利用的遥感数据越来越多,但是遥感数据的获取因受技术等条件限制其空间分辨率和时间分辨率往往不能同时兼优 [1 ,2 ,3 ,4 ,5 ] .以MODIS数据为例,虽然使用MODIS数据每天都可以对全球任意区域进行观测,也更容易获取无云区的影像,但是由于其空间分辨率较低,不足以全面反映地表覆被空间分布状况[6 ] .Landsat数据兼具时间分辨率和空间分辨率的优势,得到了广泛的应用,但是由于受云雨天气的影响,数据的可用性将大大降低[7 ] ,这进一步影响了该数据在土地利用、覆被制图及动态变化监测等方面的应用[8 ] . ...
融合MODIS与Landsat数据生成高时间分辨率Landsat数据
1
2012
... 随着遥感技术的发展,可利用的遥感数据越来越多,但是遥感数据的获取因受技术等条件限制其空间分辨率和时间分辨率往往不能同时兼优 [1 ,2 ,3 ,4 ,5 ] .以MODIS数据为例,虽然使用MODIS数据每天都可以对全球任意区域进行观测,也更容易获取无云区的影像,但是由于其空间分辨率较低,不足以全面反映地表覆被空间分布状况[6 ] .Landsat数据兼具时间分辨率和空间分辨率的优势,得到了广泛的应用,但是由于受云雨天气的影响,数据的可用性将大大降低[7 ] ,这进一步影响了该数据在土地利用、覆被制图及动态变化监测等方面的应用[8 ] . ...
多源数据融合的高时空分辨率植被指数生成
1
2019
... 随着遥感技术的发展,可利用的遥感数据越来越多,但是遥感数据的获取因受技术等条件限制其空间分辨率和时间分辨率往往不能同时兼优 [1 ,2 ,3 ,4 ,5 ] .以MODIS数据为例,虽然使用MODIS数据每天都可以对全球任意区域进行观测,也更容易获取无云区的影像,但是由于其空间分辨率较低,不足以全面反映地表覆被空间分布状况[6 ] .Landsat数据兼具时间分辨率和空间分辨率的优势,得到了广泛的应用,但是由于受云雨天气的影响,数据的可用性将大大降低[7 ] ,这进一步影响了该数据在土地利用、覆被制图及动态变化监测等方面的应用[8 ] . ...
多源数据融合的高时空分辨率植被指数生成
1
2019
... 随着遥感技术的发展,可利用的遥感数据越来越多,但是遥感数据的获取因受技术等条件限制其空间分辨率和时间分辨率往往不能同时兼优 [1 ,2 ,3 ,4 ,5 ] .以MODIS数据为例,虽然使用MODIS数据每天都可以对全球任意区域进行观测,也更容易获取无云区的影像,但是由于其空间分辨率较低,不足以全面反映地表覆被空间分布状况[6 ] .Landsat数据兼具时间分辨率和空间分辨率的优势,得到了广泛的应用,但是由于受云雨天气的影响,数据的可用性将大大降低[7 ] ,这进一步影响了该数据在土地利用、覆被制图及动态变化监测等方面的应用[8 ] . ...
A comparison of STARFM and an unmixing-based algorithm for Landsat and MODIS data fusion
1
2015
... 随着遥感技术的发展,可利用的遥感数据越来越多,但是遥感数据的获取因受技术等条件限制其空间分辨率和时间分辨率往往不能同时兼优 [1 ,2 ,3 ,4 ,5 ] .以MODIS数据为例,虽然使用MODIS数据每天都可以对全球任意区域进行观测,也更容易获取无云区的影像,但是由于其空间分辨率较低,不足以全面反映地表覆被空间分布状况[6 ] .Landsat数据兼具时间分辨率和空间分辨率的优势,得到了广泛的应用,但是由于受云雨天气的影响,数据的可用性将大大降低[7 ] ,这进一步影响了该数据在土地利用、覆被制图及动态变化监测等方面的应用[8 ] . ...
遥感数据时空融合研究进展及展望
1
2018
... 随着遥感技术的发展,可利用的遥感数据越来越多,但是遥感数据的获取因受技术等条件限制其空间分辨率和时间分辨率往往不能同时兼优 [1 ,2 ,3 ,4 ,5 ] .以MODIS数据为例,虽然使用MODIS数据每天都可以对全球任意区域进行观测,也更容易获取无云区的影像,但是由于其空间分辨率较低,不足以全面反映地表覆被空间分布状况[6 ] .Landsat数据兼具时间分辨率和空间分辨率的优势,得到了广泛的应用,但是由于受云雨天气的影响,数据的可用性将大大降低[7 ] ,这进一步影响了该数据在土地利用、覆被制图及动态变化监测等方面的应用[8 ] . ...
遥感数据时空融合研究进展及展望
1
2018
... 随着遥感技术的发展,可利用的遥感数据越来越多,但是遥感数据的获取因受技术等条件限制其空间分辨率和时间分辨率往往不能同时兼优 [1 ,2 ,3 ,4 ,5 ] .以MODIS数据为例,虽然使用MODIS数据每天都可以对全球任意区域进行观测,也更容易获取无云区的影像,但是由于其空间分辨率较低,不足以全面反映地表覆被空间分布状况[6 ] .Landsat数据兼具时间分辨率和空间分辨率的优势,得到了广泛的应用,但是由于受云雨天气的影响,数据的可用性将大大降低[7 ] ,这进一步影响了该数据在土地利用、覆被制图及动态变化监测等方面的应用[8 ] . ...
基于FSDAF方法融合生成高时空分辨率地表温度
1
2018
... 随着遥感技术的发展,可利用的遥感数据越来越多,但是遥感数据的获取因受技术等条件限制其空间分辨率和时间分辨率往往不能同时兼优 [1 ,2 ,3 ,4 ,5 ] .以MODIS数据为例,虽然使用MODIS数据每天都可以对全球任意区域进行观测,也更容易获取无云区的影像,但是由于其空间分辨率较低,不足以全面反映地表覆被空间分布状况[6 ] .Landsat数据兼具时间分辨率和空间分辨率的优势,得到了广泛的应用,但是由于受云雨天气的影响,数据的可用性将大大降低[7 ] ,这进一步影响了该数据在土地利用、覆被制图及动态变化监测等方面的应用[8 ] . ...
基于FSDAF方法融合生成高时空分辨率地表温度
1
2018
... 随着遥感技术的发展,可利用的遥感数据越来越多,但是遥感数据的获取因受技术等条件限制其空间分辨率和时间分辨率往往不能同时兼优 [1 ,2 ,3 ,4 ,5 ] .以MODIS数据为例,虽然使用MODIS数据每天都可以对全球任意区域进行观测,也更容易获取无云区的影像,但是由于其空间分辨率较低,不足以全面反映地表覆被空间分布状况[6 ] .Landsat数据兼具时间分辨率和空间分辨率的优势,得到了广泛的应用,但是由于受云雨天气的影响,数据的可用性将大大降低[7 ] ,这进一步影响了该数据在土地利用、覆被制图及动态变化监测等方面的应用[8 ] . ...
Method to construct high spatial and temporal resolution NDVI dataset-STAVFM
1
2011
... 随着遥感技术的发展,可利用的遥感数据越来越多,但是遥感数据的获取因受技术等条件限制其空间分辨率和时间分辨率往往不能同时兼优 [1 ,2 ,3 ,4 ,5 ] .以MODIS数据为例,虽然使用MODIS数据每天都可以对全球任意区域进行观测,也更容易获取无云区的影像,但是由于其空间分辨率较低,不足以全面反映地表覆被空间分布状况[6 ] .Landsat数据兼具时间分辨率和空间分辨率的优势,得到了广泛的应用,但是由于受云雨天气的影响,数据的可用性将大大降低[7 ] ,这进一步影响了该数据在土地利用、覆被制图及动态变化监测等方面的应用[8 ] . ...
MODIS-based change detection for Grizzly Bear habitat mapping in Alberta
1
2008
... 随着遥感技术的发展,可利用的遥感数据越来越多,但是遥感数据的获取因受技术等条件限制其空间分辨率和时间分辨率往往不能同时兼优 [1 ,2 ,3 ,4 ,5 ] .以MODIS数据为例,虽然使用MODIS数据每天都可以对全球任意区域进行观测,也更容易获取无云区的影像,但是由于其空间分辨率较低,不足以全面反映地表覆被空间分布状况[6 ] .Landsat数据兼具时间分辨率和空间分辨率的优势,得到了广泛的应用,但是由于受云雨天气的影响,数据的可用性将大大降低[7 ] ,这进一步影响了该数据在土地利用、覆被制图及动态变化监测等方面的应用[8 ] . ...
The availability of cloud-free Landsat ETM+ data over the conterminous United States and globally
1
2008
... 随着遥感技术的发展,可利用的遥感数据越来越多,但是遥感数据的获取因受技术等条件限制其空间分辨率和时间分辨率往往不能同时兼优 [1 ,2 ,3 ,4 ,5 ] .以MODIS数据为例,虽然使用MODIS数据每天都可以对全球任意区域进行观测,也更容易获取无云区的影像,但是由于其空间分辨率较低,不足以全面反映地表覆被空间分布状况[6 ] .Landsat数据兼具时间分辨率和空间分辨率的优势,得到了广泛的应用,但是由于受云雨天气的影响,数据的可用性将大大降低[7 ] ,这进一步影响了该数据在土地利用、覆被制图及动态变化监测等方面的应用[8 ] . ...
多源卫星遥感影像时空融合研究的现状及展望
1
2017
... 解决上述问题的方法之一就是将不同传感器获取的具有不同时、空分辨率特征的数据进行融合,生成同时具备高时间分辨率和高空间分辨率的遥感数据[9 ,10 ,11 ,12 ,13 ,14 ] .围绕这一目标,国内外学者展开了一系列研究,Gao等[15 ] 于2006年提出的一种时空自适应反射融合模型(spatial and temporal adaptive reflectance fusion model,STARFM)方法,其基本原理是利用同一时期的Landsat TM和MODIS数据以及另一时期的MODIS数据,通过滑动窗口内相似像元值加权计算得到另一时期的Landsat TM数据.STARFM通常能够融合生成与真实影像高度一致的预测影像,但该方法在初期高空间分辨率影像上没有记录地物发生的突变信息.针对该问题,Hilker等[16 ] 通过加入从MODIS影像上提取的地物突变时间信息作为判断条件,若预测期在突变日期之前,则选择初期的高空间分辨率影像作为基期影像; 否则选择末期的高空间分辨率影像,制定了对于基期影像的选择标准,从而得到了更加准确的预测期影像.Zhu等[17 ] 提出了一种增强型STARFM(enhanced STARFM,ESTARFM)方法,该方法采用2个时刻的遥感影像作为基础数据,通过计算滑动窗口内某像元高空间分辨率与低空间分辨率的值之间的相关系数指标,改进了原方法中对像元纯度的判断规则以及对光谱距离的计算方法,从而使得新方法对地形破碎地区具有更好的适用性.除上述基于STARFM的几种方法外,Zurita-Milla等[18 ] 基于线性光谱混合模型,提出了一种利用高精度土地利用图对低空间分辨率影像进行混合像元分解,以得到高时空分辨率遥感数据的方法.该方法对整景低空间分辨率影像进行一次性分解,对于同一类别的所有高空间分辨率像元仅能获得同一个反射率值,这样的策略显然没有充分考虑端元平均反射率的空间异质性.有学者[19 ,20 ] 考虑在分解时加入空间距离或光谱距离进行加权,以提高分解精度; 但是受方法自身缺陷所限,这些方法都只能获得类别的平均反射率.为了改善这一问题,Zhang等[21 ] 提出了一种增强型的时空融合模型(enhanced spatial and temporal data fusion model,ESTDFM),该方法基于ISODATA分类法对2景高空间分辨率影像进行分类,利用滑动窗口技术对3期低空间分辨率影像进行混合像元分解; 对得到的2个预测影像加权求和,得到最终的高空间分辨率预测影像.虽然该方法取得了较高精度的预测期影像,但并未考虑高空间分辨率和低空间分辨率影像中纯净地物的光谱特征差异,即在不同传感器下相同地物反射率不同; 并且对端元反射率进行混合像元分解时,采用了无约束最小二乘法.因此,该方法计算的结果将会产生一定的误差. ...
多源卫星遥感影像时空融合研究的现状及展望
1
2017
... 解决上述问题的方法之一就是将不同传感器获取的具有不同时、空分辨率特征的数据进行融合,生成同时具备高时间分辨率和高空间分辨率的遥感数据[9 ,10 ,11 ,12 ,13 ,14 ] .围绕这一目标,国内外学者展开了一系列研究,Gao等[15 ] 于2006年提出的一种时空自适应反射融合模型(spatial and temporal adaptive reflectance fusion model,STARFM)方法,其基本原理是利用同一时期的Landsat TM和MODIS数据以及另一时期的MODIS数据,通过滑动窗口内相似像元值加权计算得到另一时期的Landsat TM数据.STARFM通常能够融合生成与真实影像高度一致的预测影像,但该方法在初期高空间分辨率影像上没有记录地物发生的突变信息.针对该问题,Hilker等[16 ] 通过加入从MODIS影像上提取的地物突变时间信息作为判断条件,若预测期在突变日期之前,则选择初期的高空间分辨率影像作为基期影像; 否则选择末期的高空间分辨率影像,制定了对于基期影像的选择标准,从而得到了更加准确的预测期影像.Zhu等[17 ] 提出了一种增强型STARFM(enhanced STARFM,ESTARFM)方法,该方法采用2个时刻的遥感影像作为基础数据,通过计算滑动窗口内某像元高空间分辨率与低空间分辨率的值之间的相关系数指标,改进了原方法中对像元纯度的判断规则以及对光谱距离的计算方法,从而使得新方法对地形破碎地区具有更好的适用性.除上述基于STARFM的几种方法外,Zurita-Milla等[18 ] 基于线性光谱混合模型,提出了一种利用高精度土地利用图对低空间分辨率影像进行混合像元分解,以得到高时空分辨率遥感数据的方法.该方法对整景低空间分辨率影像进行一次性分解,对于同一类别的所有高空间分辨率像元仅能获得同一个反射率值,这样的策略显然没有充分考虑端元平均反射率的空间异质性.有学者[19 ,20 ] 考虑在分解时加入空间距离或光谱距离进行加权,以提高分解精度; 但是受方法自身缺陷所限,这些方法都只能获得类别的平均反射率.为了改善这一问题,Zhang等[21 ] 提出了一种增强型的时空融合模型(enhanced spatial and temporal data fusion model,ESTDFM),该方法基于ISODATA分类法对2景高空间分辨率影像进行分类,利用滑动窗口技术对3期低空间分辨率影像进行混合像元分解; 对得到的2个预测影像加权求和,得到最终的高空间分辨率预测影像.虽然该方法取得了较高精度的预测期影像,但并未考虑高空间分辨率和低空间分辨率影像中纯净地物的光谱特征差异,即在不同传感器下相同地物反射率不同; 并且对端元反射率进行混合像元分解时,采用了无约束最小二乘法.因此,该方法计算的结果将会产生一定的误差. ...
城市地表温度影像时空融合方法研究
1
2018
... 解决上述问题的方法之一就是将不同传感器获取的具有不同时、空分辨率特征的数据进行融合,生成同时具备高时间分辨率和高空间分辨率的遥感数据[9 ,10 ,11 ,12 ,13 ,14 ] .围绕这一目标,国内外学者展开了一系列研究,Gao等[15 ] 于2006年提出的一种时空自适应反射融合模型(spatial and temporal adaptive reflectance fusion model,STARFM)方法,其基本原理是利用同一时期的Landsat TM和MODIS数据以及另一时期的MODIS数据,通过滑动窗口内相似像元值加权计算得到另一时期的Landsat TM数据.STARFM通常能够融合生成与真实影像高度一致的预测影像,但该方法在初期高空间分辨率影像上没有记录地物发生的突变信息.针对该问题,Hilker等[16 ] 通过加入从MODIS影像上提取的地物突变时间信息作为判断条件,若预测期在突变日期之前,则选择初期的高空间分辨率影像作为基期影像; 否则选择末期的高空间分辨率影像,制定了对于基期影像的选择标准,从而得到了更加准确的预测期影像.Zhu等[17 ] 提出了一种增强型STARFM(enhanced STARFM,ESTARFM)方法,该方法采用2个时刻的遥感影像作为基础数据,通过计算滑动窗口内某像元高空间分辨率与低空间分辨率的值之间的相关系数指标,改进了原方法中对像元纯度的判断规则以及对光谱距离的计算方法,从而使得新方法对地形破碎地区具有更好的适用性.除上述基于STARFM的几种方法外,Zurita-Milla等[18 ] 基于线性光谱混合模型,提出了一种利用高精度土地利用图对低空间分辨率影像进行混合像元分解,以得到高时空分辨率遥感数据的方法.该方法对整景低空间分辨率影像进行一次性分解,对于同一类别的所有高空间分辨率像元仅能获得同一个反射率值,这样的策略显然没有充分考虑端元平均反射率的空间异质性.有学者[19 ,20 ] 考虑在分解时加入空间距离或光谱距离进行加权,以提高分解精度; 但是受方法自身缺陷所限,这些方法都只能获得类别的平均反射率.为了改善这一问题,Zhang等[21 ] 提出了一种增强型的时空融合模型(enhanced spatial and temporal data fusion model,ESTDFM),该方法基于ISODATA分类法对2景高空间分辨率影像进行分类,利用滑动窗口技术对3期低空间分辨率影像进行混合像元分解; 对得到的2个预测影像加权求和,得到最终的高空间分辨率预测影像.虽然该方法取得了较高精度的预测期影像,但并未考虑高空间分辨率和低空间分辨率影像中纯净地物的光谱特征差异,即在不同传感器下相同地物反射率不同; 并且对端元反射率进行混合像元分解时,采用了无约束最小二乘法.因此,该方法计算的结果将会产生一定的误差. ...
城市地表温度影像时空融合方法研究
1
2018
... 解决上述问题的方法之一就是将不同传感器获取的具有不同时、空分辨率特征的数据进行融合,生成同时具备高时间分辨率和高空间分辨率的遥感数据[9 ,10 ,11 ,12 ,13 ,14 ] .围绕这一目标,国内外学者展开了一系列研究,Gao等[15 ] 于2006年提出的一种时空自适应反射融合模型(spatial and temporal adaptive reflectance fusion model,STARFM)方法,其基本原理是利用同一时期的Landsat TM和MODIS数据以及另一时期的MODIS数据,通过滑动窗口内相似像元值加权计算得到另一时期的Landsat TM数据.STARFM通常能够融合生成与真实影像高度一致的预测影像,但该方法在初期高空间分辨率影像上没有记录地物发生的突变信息.针对该问题,Hilker等[16 ] 通过加入从MODIS影像上提取的地物突变时间信息作为判断条件,若预测期在突变日期之前,则选择初期的高空间分辨率影像作为基期影像; 否则选择末期的高空间分辨率影像,制定了对于基期影像的选择标准,从而得到了更加准确的预测期影像.Zhu等[17 ] 提出了一种增强型STARFM(enhanced STARFM,ESTARFM)方法,该方法采用2个时刻的遥感影像作为基础数据,通过计算滑动窗口内某像元高空间分辨率与低空间分辨率的值之间的相关系数指标,改进了原方法中对像元纯度的判断规则以及对光谱距离的计算方法,从而使得新方法对地形破碎地区具有更好的适用性.除上述基于STARFM的几种方法外,Zurita-Milla等[18 ] 基于线性光谱混合模型,提出了一种利用高精度土地利用图对低空间分辨率影像进行混合像元分解,以得到高时空分辨率遥感数据的方法.该方法对整景低空间分辨率影像进行一次性分解,对于同一类别的所有高空间分辨率像元仅能获得同一个反射率值,这样的策略显然没有充分考虑端元平均反射率的空间异质性.有学者[19 ,20 ] 考虑在分解时加入空间距离或光谱距离进行加权,以提高分解精度; 但是受方法自身缺陷所限,这些方法都只能获得类别的平均反射率.为了改善这一问题,Zhang等[21 ] 提出了一种增强型的时空融合模型(enhanced spatial and temporal data fusion model,ESTDFM),该方法基于ISODATA分类法对2景高空间分辨率影像进行分类,利用滑动窗口技术对3期低空间分辨率影像进行混合像元分解; 对得到的2个预测影像加权求和,得到最终的高空间分辨率预测影像.虽然该方法取得了较高精度的预测期影像,但并未考虑高空间分辨率和低空间分辨率影像中纯净地物的光谱特征差异,即在不同传感器下相同地物反射率不同; 并且对端元反射率进行混合像元分解时,采用了无约束最小二乘法.因此,该方法计算的结果将会产生一定的误差. ...
Coastal dynamic and shoreline mapping:Multi-sources spatial data analysis in Semarang Indonesia
1
2008
... 解决上述问题的方法之一就是将不同传感器获取的具有不同时、空分辨率特征的数据进行融合,生成同时具备高时间分辨率和高空间分辨率的遥感数据[9 ,10 ,11 ,12 ,13 ,14 ] .围绕这一目标,国内外学者展开了一系列研究,Gao等[15 ] 于2006年提出的一种时空自适应反射融合模型(spatial and temporal adaptive reflectance fusion model,STARFM)方法,其基本原理是利用同一时期的Landsat TM和MODIS数据以及另一时期的MODIS数据,通过滑动窗口内相似像元值加权计算得到另一时期的Landsat TM数据.STARFM通常能够融合生成与真实影像高度一致的预测影像,但该方法在初期高空间分辨率影像上没有记录地物发生的突变信息.针对该问题,Hilker等[16 ] 通过加入从MODIS影像上提取的地物突变时间信息作为判断条件,若预测期在突变日期之前,则选择初期的高空间分辨率影像作为基期影像; 否则选择末期的高空间分辨率影像,制定了对于基期影像的选择标准,从而得到了更加准确的预测期影像.Zhu等[17 ] 提出了一种增强型STARFM(enhanced STARFM,ESTARFM)方法,该方法采用2个时刻的遥感影像作为基础数据,通过计算滑动窗口内某像元高空间分辨率与低空间分辨率的值之间的相关系数指标,改进了原方法中对像元纯度的判断规则以及对光谱距离的计算方法,从而使得新方法对地形破碎地区具有更好的适用性.除上述基于STARFM的几种方法外,Zurita-Milla等[18 ] 基于线性光谱混合模型,提出了一种利用高精度土地利用图对低空间分辨率影像进行混合像元分解,以得到高时空分辨率遥感数据的方法.该方法对整景低空间分辨率影像进行一次性分解,对于同一类别的所有高空间分辨率像元仅能获得同一个反射率值,这样的策略显然没有充分考虑端元平均反射率的空间异质性.有学者[19 ,20 ] 考虑在分解时加入空间距离或光谱距离进行加权,以提高分解精度; 但是受方法自身缺陷所限,这些方法都只能获得类别的平均反射率.为了改善这一问题,Zhang等[21 ] 提出了一种增强型的时空融合模型(enhanced spatial and temporal data fusion model,ESTDFM),该方法基于ISODATA分类法对2景高空间分辨率影像进行分类,利用滑动窗口技术对3期低空间分辨率影像进行混合像元分解; 对得到的2个预测影像加权求和,得到最终的高空间分辨率预测影像.虽然该方法取得了较高精度的预测期影像,但并未考虑高空间分辨率和低空间分辨率影像中纯净地物的光谱特征差异,即在不同传感器下相同地物反射率不同; 并且对端元反射率进行混合像元分解时,采用了无约束最小二乘法.因此,该方法计算的结果将会产生一定的误差. ...
A multi-resoluticm multi-temporal technique for detecting and mapping deforestation in the Brazilian Amazon rainforest
1
2011
... 解决上述问题的方法之一就是将不同传感器获取的具有不同时、空分辨率特征的数据进行融合,生成同时具备高时间分辨率和高空间分辨率的遥感数据[9 ,10 ,11 ,12 ,13 ,14 ] .围绕这一目标,国内外学者展开了一系列研究,Gao等[15 ] 于2006年提出的一种时空自适应反射融合模型(spatial and temporal adaptive reflectance fusion model,STARFM)方法,其基本原理是利用同一时期的Landsat TM和MODIS数据以及另一时期的MODIS数据,通过滑动窗口内相似像元值加权计算得到另一时期的Landsat TM数据.STARFM通常能够融合生成与真实影像高度一致的预测影像,但该方法在初期高空间分辨率影像上没有记录地物发生的突变信息.针对该问题,Hilker等[16 ] 通过加入从MODIS影像上提取的地物突变时间信息作为判断条件,若预测期在突变日期之前,则选择初期的高空间分辨率影像作为基期影像; 否则选择末期的高空间分辨率影像,制定了对于基期影像的选择标准,从而得到了更加准确的预测期影像.Zhu等[17 ] 提出了一种增强型STARFM(enhanced STARFM,ESTARFM)方法,该方法采用2个时刻的遥感影像作为基础数据,通过计算滑动窗口内某像元高空间分辨率与低空间分辨率的值之间的相关系数指标,改进了原方法中对像元纯度的判断规则以及对光谱距离的计算方法,从而使得新方法对地形破碎地区具有更好的适用性.除上述基于STARFM的几种方法外,Zurita-Milla等[18 ] 基于线性光谱混合模型,提出了一种利用高精度土地利用图对低空间分辨率影像进行混合像元分解,以得到高时空分辨率遥感数据的方法.该方法对整景低空间分辨率影像进行一次性分解,对于同一类别的所有高空间分辨率像元仅能获得同一个反射率值,这样的策略显然没有充分考虑端元平均反射率的空间异质性.有学者[19 ,20 ] 考虑在分解时加入空间距离或光谱距离进行加权,以提高分解精度; 但是受方法自身缺陷所限,这些方法都只能获得类别的平均反射率.为了改善这一问题,Zhang等[21 ] 提出了一种增强型的时空融合模型(enhanced spatial and temporal data fusion model,ESTDFM),该方法基于ISODATA分类法对2景高空间分辨率影像进行分类,利用滑动窗口技术对3期低空间分辨率影像进行混合像元分解; 对得到的2个预测影像加权求和,得到最终的高空间分辨率预测影像.虽然该方法取得了较高精度的预测期影像,但并未考虑高空间分辨率和低空间分辨率影像中纯净地物的光谱特征差异,即在不同传感器下相同地物反射率不同; 并且对端元反射率进行混合像元分解时,采用了无约束最小二乘法.因此,该方法计算的结果将会产生一定的误差. ...
Spatio-temporal reflectance fusion via unmixing:Accounting for both phenological and land-cover changes
1
2014
... 解决上述问题的方法之一就是将不同传感器获取的具有不同时、空分辨率特征的数据进行融合,生成同时具备高时间分辨率和高空间分辨率的遥感数据[9 ,10 ,11 ,12 ,13 ,14 ] .围绕这一目标,国内外学者展开了一系列研究,Gao等[15 ] 于2006年提出的一种时空自适应反射融合模型(spatial and temporal adaptive reflectance fusion model,STARFM)方法,其基本原理是利用同一时期的Landsat TM和MODIS数据以及另一时期的MODIS数据,通过滑动窗口内相似像元值加权计算得到另一时期的Landsat TM数据.STARFM通常能够融合生成与真实影像高度一致的预测影像,但该方法在初期高空间分辨率影像上没有记录地物发生的突变信息.针对该问题,Hilker等[16 ] 通过加入从MODIS影像上提取的地物突变时间信息作为判断条件,若预测期在突变日期之前,则选择初期的高空间分辨率影像作为基期影像; 否则选择末期的高空间分辨率影像,制定了对于基期影像的选择标准,从而得到了更加准确的预测期影像.Zhu等[17 ] 提出了一种增强型STARFM(enhanced STARFM,ESTARFM)方法,该方法采用2个时刻的遥感影像作为基础数据,通过计算滑动窗口内某像元高空间分辨率与低空间分辨率的值之间的相关系数指标,改进了原方法中对像元纯度的判断规则以及对光谱距离的计算方法,从而使得新方法对地形破碎地区具有更好的适用性.除上述基于STARFM的几种方法外,Zurita-Milla等[18 ] 基于线性光谱混合模型,提出了一种利用高精度土地利用图对低空间分辨率影像进行混合像元分解,以得到高时空分辨率遥感数据的方法.该方法对整景低空间分辨率影像进行一次性分解,对于同一类别的所有高空间分辨率像元仅能获得同一个反射率值,这样的策略显然没有充分考虑端元平均反射率的空间异质性.有学者[19 ,20 ] 考虑在分解时加入空间距离或光谱距离进行加权,以提高分解精度; 但是受方法自身缺陷所限,这些方法都只能获得类别的平均反射率.为了改善这一问题,Zhang等[21 ] 提出了一种增强型的时空融合模型(enhanced spatial and temporal data fusion model,ESTDFM),该方法基于ISODATA分类法对2景高空间分辨率影像进行分类,利用滑动窗口技术对3期低空间分辨率影像进行混合像元分解; 对得到的2个预测影像加权求和,得到最终的高空间分辨率预测影像.虽然该方法取得了较高精度的预测期影像,但并未考虑高空间分辨率和低空间分辨率影像中纯净地物的光谱特征差异,即在不同传感器下相同地物反射率不同; 并且对端元反射率进行混合像元分解时,采用了无约束最小二乘法.因此,该方法计算的结果将会产生一定的误差. ...
Spatiotemporal satellite image fusion through one-pair image learning
1
2013
... 解决上述问题的方法之一就是将不同传感器获取的具有不同时、空分辨率特征的数据进行融合,生成同时具备高时间分辨率和高空间分辨率的遥感数据[9 ,10 ,11 ,12 ,13 ,14 ] .围绕这一目标,国内外学者展开了一系列研究,Gao等[15 ] 于2006年提出的一种时空自适应反射融合模型(spatial and temporal adaptive reflectance fusion model,STARFM)方法,其基本原理是利用同一时期的Landsat TM和MODIS数据以及另一时期的MODIS数据,通过滑动窗口内相似像元值加权计算得到另一时期的Landsat TM数据.STARFM通常能够融合生成与真实影像高度一致的预测影像,但该方法在初期高空间分辨率影像上没有记录地物发生的突变信息.针对该问题,Hilker等[16 ] 通过加入从MODIS影像上提取的地物突变时间信息作为判断条件,若预测期在突变日期之前,则选择初期的高空间分辨率影像作为基期影像; 否则选择末期的高空间分辨率影像,制定了对于基期影像的选择标准,从而得到了更加准确的预测期影像.Zhu等[17 ] 提出了一种增强型STARFM(enhanced STARFM,ESTARFM)方法,该方法采用2个时刻的遥感影像作为基础数据,通过计算滑动窗口内某像元高空间分辨率与低空间分辨率的值之间的相关系数指标,改进了原方法中对像元纯度的判断规则以及对光谱距离的计算方法,从而使得新方法对地形破碎地区具有更好的适用性.除上述基于STARFM的几种方法外,Zurita-Milla等[18 ] 基于线性光谱混合模型,提出了一种利用高精度土地利用图对低空间分辨率影像进行混合像元分解,以得到高时空分辨率遥感数据的方法.该方法对整景低空间分辨率影像进行一次性分解,对于同一类别的所有高空间分辨率像元仅能获得同一个反射率值,这样的策略显然没有充分考虑端元平均反射率的空间异质性.有学者[19 ,20 ] 考虑在分解时加入空间距离或光谱距离进行加权,以提高分解精度; 但是受方法自身缺陷所限,这些方法都只能获得类别的平均反射率.为了改善这一问题,Zhang等[21 ] 提出了一种增强型的时空融合模型(enhanced spatial and temporal data fusion model,ESTDFM),该方法基于ISODATA分类法对2景高空间分辨率影像进行分类,利用滑动窗口技术对3期低空间分辨率影像进行混合像元分解; 对得到的2个预测影像加权求和,得到最终的高空间分辨率预测影像.虽然该方法取得了较高精度的预测期影像,但并未考虑高空间分辨率和低空间分辨率影像中纯净地物的光谱特征差异,即在不同传感器下相同地物反射率不同; 并且对端元反射率进行混合像元分解时,采用了无约束最小二乘法.因此,该方法计算的结果将会产生一定的误差. ...
On the blending of the Landsat and MODIS surface reflectance:Predicting daily Landsat surface reflectance
1
2006
... 解决上述问题的方法之一就是将不同传感器获取的具有不同时、空分辨率特征的数据进行融合,生成同时具备高时间分辨率和高空间分辨率的遥感数据[9 ,10 ,11 ,12 ,13 ,14 ] .围绕这一目标,国内外学者展开了一系列研究,Gao等[15 ] 于2006年提出的一种时空自适应反射融合模型(spatial and temporal adaptive reflectance fusion model,STARFM)方法,其基本原理是利用同一时期的Landsat TM和MODIS数据以及另一时期的MODIS数据,通过滑动窗口内相似像元值加权计算得到另一时期的Landsat TM数据.STARFM通常能够融合生成与真实影像高度一致的预测影像,但该方法在初期高空间分辨率影像上没有记录地物发生的突变信息.针对该问题,Hilker等[16 ] 通过加入从MODIS影像上提取的地物突变时间信息作为判断条件,若预测期在突变日期之前,则选择初期的高空间分辨率影像作为基期影像; 否则选择末期的高空间分辨率影像,制定了对于基期影像的选择标准,从而得到了更加准确的预测期影像.Zhu等[17 ] 提出了一种增强型STARFM(enhanced STARFM,ESTARFM)方法,该方法采用2个时刻的遥感影像作为基础数据,通过计算滑动窗口内某像元高空间分辨率与低空间分辨率的值之间的相关系数指标,改进了原方法中对像元纯度的判断规则以及对光谱距离的计算方法,从而使得新方法对地形破碎地区具有更好的适用性.除上述基于STARFM的几种方法外,Zurita-Milla等[18 ] 基于线性光谱混合模型,提出了一种利用高精度土地利用图对低空间分辨率影像进行混合像元分解,以得到高时空分辨率遥感数据的方法.该方法对整景低空间分辨率影像进行一次性分解,对于同一类别的所有高空间分辨率像元仅能获得同一个反射率值,这样的策略显然没有充分考虑端元平均反射率的空间异质性.有学者[19 ,20 ] 考虑在分解时加入空间距离或光谱距离进行加权,以提高分解精度; 但是受方法自身缺陷所限,这些方法都只能获得类别的平均反射率.为了改善这一问题,Zhang等[21 ] 提出了一种增强型的时空融合模型(enhanced spatial and temporal data fusion model,ESTDFM),该方法基于ISODATA分类法对2景高空间分辨率影像进行分类,利用滑动窗口技术对3期低空间分辨率影像进行混合像元分解; 对得到的2个预测影像加权求和,得到最终的高空间分辨率预测影像.虽然该方法取得了较高精度的预测期影像,但并未考虑高空间分辨率和低空间分辨率影像中纯净地物的光谱特征差异,即在不同传感器下相同地物反射率不同; 并且对端元反射率进行混合像元分解时,采用了无约束最小二乘法.因此,该方法计算的结果将会产生一定的误差. ...
A new data fusion model for high spatial-and temporal-resolution mapping of forest disturbance based on Landsat and MODIS
1
2009
... 解决上述问题的方法之一就是将不同传感器获取的具有不同时、空分辨率特征的数据进行融合,生成同时具备高时间分辨率和高空间分辨率的遥感数据[9 ,10 ,11 ,12 ,13 ,14 ] .围绕这一目标,国内外学者展开了一系列研究,Gao等[15 ] 于2006年提出的一种时空自适应反射融合模型(spatial and temporal adaptive reflectance fusion model,STARFM)方法,其基本原理是利用同一时期的Landsat TM和MODIS数据以及另一时期的MODIS数据,通过滑动窗口内相似像元值加权计算得到另一时期的Landsat TM数据.STARFM通常能够融合生成与真实影像高度一致的预测影像,但该方法在初期高空间分辨率影像上没有记录地物发生的突变信息.针对该问题,Hilker等[16 ] 通过加入从MODIS影像上提取的地物突变时间信息作为判断条件,若预测期在突变日期之前,则选择初期的高空间分辨率影像作为基期影像; 否则选择末期的高空间分辨率影像,制定了对于基期影像的选择标准,从而得到了更加准确的预测期影像.Zhu等[17 ] 提出了一种增强型STARFM(enhanced STARFM,ESTARFM)方法,该方法采用2个时刻的遥感影像作为基础数据,通过计算滑动窗口内某像元高空间分辨率与低空间分辨率的值之间的相关系数指标,改进了原方法中对像元纯度的判断规则以及对光谱距离的计算方法,从而使得新方法对地形破碎地区具有更好的适用性.除上述基于STARFM的几种方法外,Zurita-Milla等[18 ] 基于线性光谱混合模型,提出了一种利用高精度土地利用图对低空间分辨率影像进行混合像元分解,以得到高时空分辨率遥感数据的方法.该方法对整景低空间分辨率影像进行一次性分解,对于同一类别的所有高空间分辨率像元仅能获得同一个反射率值,这样的策略显然没有充分考虑端元平均反射率的空间异质性.有学者[19 ,20 ] 考虑在分解时加入空间距离或光谱距离进行加权,以提高分解精度; 但是受方法自身缺陷所限,这些方法都只能获得类别的平均反射率.为了改善这一问题,Zhang等[21 ] 提出了一种增强型的时空融合模型(enhanced spatial and temporal data fusion model,ESTDFM),该方法基于ISODATA分类法对2景高空间分辨率影像进行分类,利用滑动窗口技术对3期低空间分辨率影像进行混合像元分解; 对得到的2个预测影像加权求和,得到最终的高空间分辨率预测影像.虽然该方法取得了较高精度的预测期影像,但并未考虑高空间分辨率和低空间分辨率影像中纯净地物的光谱特征差异,即在不同传感器下相同地物反射率不同; 并且对端元反射率进行混合像元分解时,采用了无约束最小二乘法.因此,该方法计算的结果将会产生一定的误差. ...
An enhanced spatial and temporal adaptive reflectance fusion model for complex heterogeneous regions
1
2010
... 解决上述问题的方法之一就是将不同传感器获取的具有不同时、空分辨率特征的数据进行融合,生成同时具备高时间分辨率和高空间分辨率的遥感数据[9 ,10 ,11 ,12 ,13 ,14 ] .围绕这一目标,国内外学者展开了一系列研究,Gao等[15 ] 于2006年提出的一种时空自适应反射融合模型(spatial and temporal adaptive reflectance fusion model,STARFM)方法,其基本原理是利用同一时期的Landsat TM和MODIS数据以及另一时期的MODIS数据,通过滑动窗口内相似像元值加权计算得到另一时期的Landsat TM数据.STARFM通常能够融合生成与真实影像高度一致的预测影像,但该方法在初期高空间分辨率影像上没有记录地物发生的突变信息.针对该问题,Hilker等[16 ] 通过加入从MODIS影像上提取的地物突变时间信息作为判断条件,若预测期在突变日期之前,则选择初期的高空间分辨率影像作为基期影像; 否则选择末期的高空间分辨率影像,制定了对于基期影像的选择标准,从而得到了更加准确的预测期影像.Zhu等[17 ] 提出了一种增强型STARFM(enhanced STARFM,ESTARFM)方法,该方法采用2个时刻的遥感影像作为基础数据,通过计算滑动窗口内某像元高空间分辨率与低空间分辨率的值之间的相关系数指标,改进了原方法中对像元纯度的判断规则以及对光谱距离的计算方法,从而使得新方法对地形破碎地区具有更好的适用性.除上述基于STARFM的几种方法外,Zurita-Milla等[18 ] 基于线性光谱混合模型,提出了一种利用高精度土地利用图对低空间分辨率影像进行混合像元分解,以得到高时空分辨率遥感数据的方法.该方法对整景低空间分辨率影像进行一次性分解,对于同一类别的所有高空间分辨率像元仅能获得同一个反射率值,这样的策略显然没有充分考虑端元平均反射率的空间异质性.有学者[19 ,20 ] 考虑在分解时加入空间距离或光谱距离进行加权,以提高分解精度; 但是受方法自身缺陷所限,这些方法都只能获得类别的平均反射率.为了改善这一问题,Zhang等[21 ] 提出了一种增强型的时空融合模型(enhanced spatial and temporal data fusion model,ESTDFM),该方法基于ISODATA分类法对2景高空间分辨率影像进行分类,利用滑动窗口技术对3期低空间分辨率影像进行混合像元分解; 对得到的2个预测影像加权求和,得到最终的高空间分辨率预测影像.虽然该方法取得了较高精度的预测期影像,但并未考虑高空间分辨率和低空间分辨率影像中纯净地物的光谱特征差异,即在不同传感器下相同地物反射率不同; 并且对端元反射率进行混合像元分解时,采用了无约束最小二乘法.因此,该方法计算的结果将会产生一定的误差. ...
Unmixing-based Landsat TM and MERIS FR data fusion
1
2008
... 解决上述问题的方法之一就是将不同传感器获取的具有不同时、空分辨率特征的数据进行融合,生成同时具备高时间分辨率和高空间分辨率的遥感数据[9 ,10 ,11 ,12 ,13 ,14 ] .围绕这一目标,国内外学者展开了一系列研究,Gao等[15 ] 于2006年提出的一种时空自适应反射融合模型(spatial and temporal adaptive reflectance fusion model,STARFM)方法,其基本原理是利用同一时期的Landsat TM和MODIS数据以及另一时期的MODIS数据,通过滑动窗口内相似像元值加权计算得到另一时期的Landsat TM数据.STARFM通常能够融合生成与真实影像高度一致的预测影像,但该方法在初期高空间分辨率影像上没有记录地物发生的突变信息.针对该问题,Hilker等[16 ] 通过加入从MODIS影像上提取的地物突变时间信息作为判断条件,若预测期在突变日期之前,则选择初期的高空间分辨率影像作为基期影像; 否则选择末期的高空间分辨率影像,制定了对于基期影像的选择标准,从而得到了更加准确的预测期影像.Zhu等[17 ] 提出了一种增强型STARFM(enhanced STARFM,ESTARFM)方法,该方法采用2个时刻的遥感影像作为基础数据,通过计算滑动窗口内某像元高空间分辨率与低空间分辨率的值之间的相关系数指标,改进了原方法中对像元纯度的判断规则以及对光谱距离的计算方法,从而使得新方法对地形破碎地区具有更好的适用性.除上述基于STARFM的几种方法外,Zurita-Milla等[18 ] 基于线性光谱混合模型,提出了一种利用高精度土地利用图对低空间分辨率影像进行混合像元分解,以得到高时空分辨率遥感数据的方法.该方法对整景低空间分辨率影像进行一次性分解,对于同一类别的所有高空间分辨率像元仅能获得同一个反射率值,这样的策略显然没有充分考虑端元平均反射率的空间异质性.有学者[19 ,20 ] 考虑在分解时加入空间距离或光谱距离进行加权,以提高分解精度; 但是受方法自身缺陷所限,这些方法都只能获得类别的平均反射率.为了改善这一问题,Zhang等[21 ] 提出了一种增强型的时空融合模型(enhanced spatial and temporal data fusion model,ESTDFM),该方法基于ISODATA分类法对2景高空间分辨率影像进行分类,利用滑动窗口技术对3期低空间分辨率影像进行混合像元分解; 对得到的2个预测影像加权求和,得到最终的高空间分辨率预测影像.虽然该方法取得了较高精度的预测期影像,但并未考虑高空间分辨率和低空间分辨率影像中纯净地物的光谱特征差异,即在不同传感器下相同地物反射率不同; 并且对端元反射率进行混合像元分解时,采用了无约束最小二乘法.因此,该方法计算的结果将会产生一定的误差. ...
Definition of spatially variable spectral endmembers by locally calibrated multivariate regression analyses
1
2001
... 解决上述问题的方法之一就是将不同传感器获取的具有不同时、空分辨率特征的数据进行融合,生成同时具备高时间分辨率和高空间分辨率的遥感数据[9 ,10 ,11 ,12 ,13 ,14 ] .围绕这一目标,国内外学者展开了一系列研究,Gao等[15 ] 于2006年提出的一种时空自适应反射融合模型(spatial and temporal adaptive reflectance fusion model,STARFM)方法,其基本原理是利用同一时期的Landsat TM和MODIS数据以及另一时期的MODIS数据,通过滑动窗口内相似像元值加权计算得到另一时期的Landsat TM数据.STARFM通常能够融合生成与真实影像高度一致的预测影像,但该方法在初期高空间分辨率影像上没有记录地物发生的突变信息.针对该问题,Hilker等[16 ] 通过加入从MODIS影像上提取的地物突变时间信息作为判断条件,若预测期在突变日期之前,则选择初期的高空间分辨率影像作为基期影像; 否则选择末期的高空间分辨率影像,制定了对于基期影像的选择标准,从而得到了更加准确的预测期影像.Zhu等[17 ] 提出了一种增强型STARFM(enhanced STARFM,ESTARFM)方法,该方法采用2个时刻的遥感影像作为基础数据,通过计算滑动窗口内某像元高空间分辨率与低空间分辨率的值之间的相关系数指标,改进了原方法中对像元纯度的判断规则以及对光谱距离的计算方法,从而使得新方法对地形破碎地区具有更好的适用性.除上述基于STARFM的几种方法外,Zurita-Milla等[18 ] 基于线性光谱混合模型,提出了一种利用高精度土地利用图对低空间分辨率影像进行混合像元分解,以得到高时空分辨率遥感数据的方法.该方法对整景低空间分辨率影像进行一次性分解,对于同一类别的所有高空间分辨率像元仅能获得同一个反射率值,这样的策略显然没有充分考虑端元平均反射率的空间异质性.有学者[19 ,20 ] 考虑在分解时加入空间距离或光谱距离进行加权,以提高分解精度; 但是受方法自身缺陷所限,这些方法都只能获得类别的平均反射率.为了改善这一问题,Zhang等[21 ] 提出了一种增强型的时空融合模型(enhanced spatial and temporal data fusion model,ESTDFM),该方法基于ISODATA分类法对2景高空间分辨率影像进行分类,利用滑动窗口技术对3期低空间分辨率影像进行混合像元分解; 对得到的2个预测影像加权求和,得到最终的高空间分辨率预测影像.虽然该方法取得了较高精度的预测期影像,但并未考虑高空间分辨率和低空间分辨率影像中纯净地物的光谱特征差异,即在不同传感器下相同地物反射率不同; 并且对端元反射率进行混合像元分解时,采用了无约束最小二乘法.因此,该方法计算的结果将会产生一定的误差. ...
Combining medium and coarse spatial resolution satellite data to improve the estimation of sub-pixel NDVI time series
1
2008
... 解决上述问题的方法之一就是将不同传感器获取的具有不同时、空分辨率特征的数据进行融合,生成同时具备高时间分辨率和高空间分辨率的遥感数据[9 ,10 ,11 ,12 ,13 ,14 ] .围绕这一目标,国内外学者展开了一系列研究,Gao等[15 ] 于2006年提出的一种时空自适应反射融合模型(spatial and temporal adaptive reflectance fusion model,STARFM)方法,其基本原理是利用同一时期的Landsat TM和MODIS数据以及另一时期的MODIS数据,通过滑动窗口内相似像元值加权计算得到另一时期的Landsat TM数据.STARFM通常能够融合生成与真实影像高度一致的预测影像,但该方法在初期高空间分辨率影像上没有记录地物发生的突变信息.针对该问题,Hilker等[16 ] 通过加入从MODIS影像上提取的地物突变时间信息作为判断条件,若预测期在突变日期之前,则选择初期的高空间分辨率影像作为基期影像; 否则选择末期的高空间分辨率影像,制定了对于基期影像的选择标准,从而得到了更加准确的预测期影像.Zhu等[17 ] 提出了一种增强型STARFM(enhanced STARFM,ESTARFM)方法,该方法采用2个时刻的遥感影像作为基础数据,通过计算滑动窗口内某像元高空间分辨率与低空间分辨率的值之间的相关系数指标,改进了原方法中对像元纯度的判断规则以及对光谱距离的计算方法,从而使得新方法对地形破碎地区具有更好的适用性.除上述基于STARFM的几种方法外,Zurita-Milla等[18 ] 基于线性光谱混合模型,提出了一种利用高精度土地利用图对低空间分辨率影像进行混合像元分解,以得到高时空分辨率遥感数据的方法.该方法对整景低空间分辨率影像进行一次性分解,对于同一类别的所有高空间分辨率像元仅能获得同一个反射率值,这样的策略显然没有充分考虑端元平均反射率的空间异质性.有学者[19 ,20 ] 考虑在分解时加入空间距离或光谱距离进行加权,以提高分解精度; 但是受方法自身缺陷所限,这些方法都只能获得类别的平均反射率.为了改善这一问题,Zhang等[21 ] 提出了一种增强型的时空融合模型(enhanced spatial and temporal data fusion model,ESTDFM),该方法基于ISODATA分类法对2景高空间分辨率影像进行分类,利用滑动窗口技术对3期低空间分辨率影像进行混合像元分解; 对得到的2个预测影像加权求和,得到最终的高空间分辨率预测影像.虽然该方法取得了较高精度的预测期影像,但并未考虑高空间分辨率和低空间分辨率影像中纯净地物的光谱特征差异,即在不同传感器下相同地物反射率不同; 并且对端元反射率进行混合像元分解时,采用了无约束最小二乘法.因此,该方法计算的结果将会产生一定的误差. ...
An enhanced spatial and temporal data fusion model for fusing Landsat and MODIS surface reflectance to generate high temporal Landsat-like data
1
2013
... 解决上述问题的方法之一就是将不同传感器获取的具有不同时、空分辨率特征的数据进行融合,生成同时具备高时间分辨率和高空间分辨率的遥感数据[9 ,10 ,11 ,12 ,13 ,14 ] .围绕这一目标,国内外学者展开了一系列研究,Gao等[15 ] 于2006年提出的一种时空自适应反射融合模型(spatial and temporal adaptive reflectance fusion model,STARFM)方法,其基本原理是利用同一时期的Landsat TM和MODIS数据以及另一时期的MODIS数据,通过滑动窗口内相似像元值加权计算得到另一时期的Landsat TM数据.STARFM通常能够融合生成与真实影像高度一致的预测影像,但该方法在初期高空间分辨率影像上没有记录地物发生的突变信息.针对该问题,Hilker等[16 ] 通过加入从MODIS影像上提取的地物突变时间信息作为判断条件,若预测期在突变日期之前,则选择初期的高空间分辨率影像作为基期影像; 否则选择末期的高空间分辨率影像,制定了对于基期影像的选择标准,从而得到了更加准确的预测期影像.Zhu等[17 ] 提出了一种增强型STARFM(enhanced STARFM,ESTARFM)方法,该方法采用2个时刻的遥感影像作为基础数据,通过计算滑动窗口内某像元高空间分辨率与低空间分辨率的值之间的相关系数指标,改进了原方法中对像元纯度的判断规则以及对光谱距离的计算方法,从而使得新方法对地形破碎地区具有更好的适用性.除上述基于STARFM的几种方法外,Zurita-Milla等[18 ] 基于线性光谱混合模型,提出了一种利用高精度土地利用图对低空间分辨率影像进行混合像元分解,以得到高时空分辨率遥感数据的方法.该方法对整景低空间分辨率影像进行一次性分解,对于同一类别的所有高空间分辨率像元仅能获得同一个反射率值,这样的策略显然没有充分考虑端元平均反射率的空间异质性.有学者[19 ,20 ] 考虑在分解时加入空间距离或光谱距离进行加权,以提高分解精度; 但是受方法自身缺陷所限,这些方法都只能获得类别的平均反射率.为了改善这一问题,Zhang等[21 ] 提出了一种增强型的时空融合模型(enhanced spatial and temporal data fusion model,ESTDFM),该方法基于ISODATA分类法对2景高空间分辨率影像进行分类,利用滑动窗口技术对3期低空间分辨率影像进行混合像元分解; 对得到的2个预测影像加权求和,得到最终的高空间分辨率预测影像.虽然该方法取得了较高精度的预测期影像,但并未考虑高空间分辨率和低空间分辨率影像中纯净地物的光谱特征差异,即在不同传感器下相同地物反射率不同; 并且对端元反射率进行混合像元分解时,采用了无约束最小二乘法.因此,该方法计算的结果将会产生一定的误差. ...
一种基于离散粒子群优化算法方法的高光谱图像端元提取方法
1
2011
... 通常情况下求解上述方程比较困难.为了寻求全局最优解,本文采用PSO方法,通过群体中个体之间的协作和信息共享来求解各类端元的反射率.粒子在可行解空间中不断运动并计算适应度函数值,粒子具有速度和位置2种属性,其中速度V 和位置X 更新方程[22 ] 为: ...
一种基于离散粒子群优化算法方法的高光谱图像端元提取方法
1
2011
... 通常情况下求解上述方程比较困难.为了寻求全局最优解,本文采用PSO方法,通过群体中个体之间的协作和信息共享来求解各类端元的反射率.粒子在可行解空间中不断运动并计算适应度函数值,粒子具有速度和位置2种属性,其中速度V 和位置X 更新方程[22 ] 为: ...
Adaptive image interpolation based on local activity levels
1
2003
... 本文选择3个时期获取的空间分辨率为30 m的Landsat8数据,以及对应的同一时期获取的空间分辨率为500 m的日反射率产品MOD09GA数据,获取日期分别为2015年3月13日、2015年4月14日、2015年5月16日,其中以2015年3月13日、2015年4月14日2期影像为实验影像,2015年5月16日为所预测的参考影像; 并采用Hadhoud等[23 ] 提出的权重双线性插值法对MODIS数据进行插值计算.截取MODIS和Landsat8影像重叠区域作为实验研究区(图2 ).该区域地物类型丰富,其中主要有植被、耕地、河流、裸地及城镇用地等. ...
Data fusion,definitions and architectures:Fusion of images of different spatial resolutions
1
2002
... 对遥感影像时空融合方法中敏感性参数进行研究,并确定合理的参数.在方法中有2个参数对结果的影响较大,一个是影像的分类数目,另一个是窗口的大小.预测窗口中心像元值需要邻近像元作为辅助信息,不同的分类数目和窗口大小会导致不同的相似像元数量和时间权重,这也是保证预测精度的关键.因此,本文利用常用的影像分解效果综合评价指标“相对无量纲全局误差”(erreur relative global adimensionnelle de synthese,ERGAS)[24 ,25 ] 对方法的最优参数进行筛选.ERGAS 计算公式为: ...
A flexible spatiotemporal method for fusing satellite images with different resolutions
1
2016
... 对遥感影像时空融合方法中敏感性参数进行研究,并确定合理的参数.在方法中有2个参数对结果的影响较大,一个是影像的分类数目,另一个是窗口的大小.预测窗口中心像元值需要邻近像元作为辅助信息,不同的分类数目和窗口大小会导致不同的相似像元数量和时间权重,这也是保证预测精度的关键.因此,本文利用常用的影像分解效果综合评价指标“相对无量纲全局误差”(erreur relative global adimensionnelle de synthese,ERGAS)[24 ,25 ] 对方法的最优参数进行筛选.ERGAS 计算公式为: ...







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}