

0 引言
青藏高原分布有地球上海拔最高、数量最多、面积最大,以盐湖和咸水湖集中为特色的高原内陆湖群,是我国湖泊分布密集的地区之一,其湖泊总面积约占全国湖泊总面积的一半[1]。2019年7月亚洲水塔国际研讨会上,中国科学家提出的以青藏高原冰川和湖泊为核心的第三极水塔计划[2]受到广泛关注,青藏高原冰川及湖泊变化情况已成为国际水资源研究与实践探索的热点之一。实现冰川和湖泊的准确监测是青藏高原水资源科学化管理的必要前提[3]。由于青藏高原区域自然环境恶劣,实地调查测绘等工作受制约情况明显,利用遥感影像进行高原湖泊边界及面积监测成为目前最高效的手段之一。合成孔径雷达(Synthetic Aperture Radar,SAR)主要反映地物的后向散射信息[4],使得以镜面反射为主的湖泊呈现出完全不同于冰川和陆地等其他地物的特征。由于不受天气、昼夜和季节的影响,SAR图像已成为现阶段湖泊勘测的重要数据源。
为进一步提高湖泊提取精度,部分学者开始将SAR图像中的水体纹理和形态特征引入用于辨识水体。Hahmann T等[7]利用Snake主动轮廓模型实现了TerraSAR-X数据中的湖泊分割,精度相较于阈值分割法提升明显; 王庆等[8]将纹理特征与第一主成分阈值相结合,实现基于SAR数据的鄱阳湖水体变化监测; Jin H等[9]和邓滢等[10]均提出结合纹理特征与极化特征进行极化SAR图像水体识别,精度达98.89%,同一实验区相较于基于像素的分类算法提高约6%; 冷英等[11]利用模糊C均值聚类法(Fuzzy C-Means,FCM)提取哨兵1A数据中的水体区域,实现速度提升明显,精度可达97.60%; Sghaier M O等[12]提出局部纹理描述子与形态学相结合提取湖泊轮廓曲线的算法,利用RADARSAT-2图像实现了加拿大多个地区湖泊提取,精度达到98.50%; Li N等[13]提出了噪声过滤器与改进的几何轮廓模型组合算法,基于高分三号和Sentinel-1A数据实现了丹江口水库的水线提取与动态监测。值得注意的是,上述多种方法还缺乏高级语义特征的加入,且实验区差异性较大,各算法推广性存在较大障碍。
上述各类算法均为低维或高维特征单一分析水体提取,已实现较高准确度的SAR图像湖泊提取,但当进行大范围多湖泊提取时,部分算法会受相似特征地物干扰,影响最终提取准确度。实现高维特征与低维特征的结合会使分类精度继续有提升的可能。基于此,本文提出结合Faster R-CNN和MorphACWE的湖泊提取算法,使用欧洲航天局哥白尼计划(GMES)中的Sentinel-1A卫星的C波段合成孔径雷达数据作为卷积神经网络的训练样本和测试样本数据源,通过Faster R-CNN的目标检测算法分析高维特征,实现大范围区域内的湖泊中心点确定,再通过MorphACWE轮廓模型结合低维湖泊纹理特征完成湖泊边界划分,综合实现大范围区湖泊端对端语义分割,在综合干扰下多湖泊提取结果精度达99.71%。
1 研究区概况及数据源
1.1 研究区概况
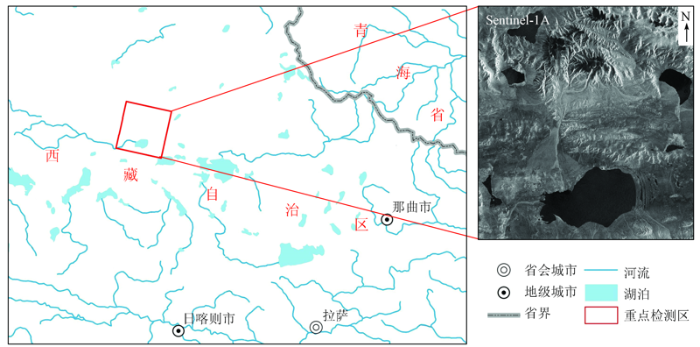
研究区位于中国西藏自治区那曲市南部至日喀则市北部,如图1所示,范围为30°40'~ 33°01'N、86°37'~ 92°19'E。覆盖面积约为17万km2,平均海拔约4 600 m,拥有面积50 km2以上的湖泊38个,1 km2以上湖泊70多个。湖泊多为咸水湖,分布较为密集,同时又由于藏西地区植被稀少,较小时间跨度下湖泊变化情况不明显,环境干扰因素较少。重点检测区共包含1 km2以上湖泊6个,其中面积最大的为面积244.7 km2的达则措。
图1
1.2 数据源
实验数据选择欧空局Sentinel-1A干涉宽幅模式(TOPS Mode)的斜距单视复数产品(SLC),空间分辨率为5 m×20 m。共选择研究区范围内VV和VH极化影像13幅,成像时间为2019年7月1日至2019年8月18日,数据列表如表1所示。上述数据均进行辐射定标、地形校正、地理编码和噪声去除等预处理。研究区内影像为目标检测模块训练样本集数据来源,重点检测区内影像为输出模型检测数据。
表1 研究使用数据
Tab.1
| 数据类型 | 成像时间 | 极化方式 | 空间分 辨率/m | 单张图幅 大小/km2 |
|---|---|---|---|---|
| Sentinel-1A | 2019-07-01 | VV | 5×20 | 250×180 |
| 2019-07-08 | VV | |||
| 2019-07-13 | VV | |||
| 2019-07-25 | VV/VH | |||
| 2019-07-27 | VV/VH | |||
| 2019-07-31 | VV | |||
| 2019-08-01 | VV | |||
| 2019-08-06 | VV | |||
| 2019-08-07 | VV/VH | |||
| 2019-08-16 | VV | |||
| Sentinel-2A | 2019-07-22 | — | 10 | 110×110 |
| 2019-08-11 | ||||
| 2019-09-05 | ||||
| 2019-09-22 |
参考数据为欧空局Sentinel-2A的多光谱影像经正射校正和亚像元级几何精校正后的大气表观反射率产品(Level-1C)数据,该影像共13个波段,空间分辨率为10 m。由于云雾影响,仅选取4幅影像,成像时间为2019年7月22日和2019年9月22日。完成辐射定标和大气校正等预处理后,对其进行人机交互解译,分类解译成果是后期进行多方法分类结果精度评价的重要参考数据。
2 研究方法
2.1 改进型Faster R-CNN目标检测算法
2.1.1 基于VGG16的Faster R-CNN
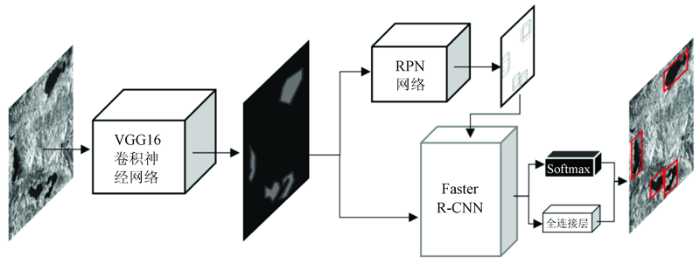
在R-CNN和Fast R-CNN目标检测算法基础上,Ren S Q等提出了Faster R-CNN算法[18]。该算法由两个重要部分组成,分别是基于全卷积的区域生成网络 (region proposal networks,RPN)和基于区域的目标识别网络Fast R-CNN。两个网络结构共享卷积层参数,使得Faster R-CNN算法的检测速度和精度都获得大幅提高。
Faster R-CNN的工作流程分4步,如图2所示,第一步将图像输入VGG16卷积神经网络,提取出图像的各项特征,输出特征图像; 第二步将特征图像输入RPN网络中,通过Anchors(候选框种类k=9)输出大量候选区域框; 第三步将第一步的特征图像和第二步RPN输出的候选区域框共同输入Fast R-CNN框架; 第四步结合Softmax层的候选框中各类别概率分析和全连接层的候选区域精确校正,最终输出目标检测结果。
图2
2.1.2 改进型特征提取器
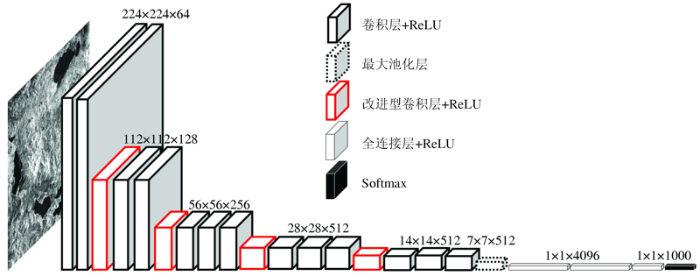
VGG16网络的池化层位于卷积层后,主要目的为降低图像维度,改善过拟合情况。原版特征提取器VGG16中所使用的多个最大池化层可以较好地保留图像区域特征和纹理信息。但值得注意的是由于本文所需处理的影像数据为SAR数据,该数据中极易出现大量噪声信息,虽然对原始数据已进行LEE滤波等去噪处理,但离完全去除噪声仍有部分距离,所以此时利用最大池化层进行池化操作可能会导致部分高噪声区域的信息误判,由于前向传播的连续性,这一信息误判会一直影响到最终结果的输出; 此外池化层在增大感受野的同时会导致部分信息缺失,这对基于像元任务的结果预测有一定的影响[19]。基于上述问题,本文将原版特征提取器VGG16中的4个最大池化层更换为步长为2的卷积层,卷积核大小为3×3,如图3所示。更换后的特征提取器可以更好地保留图像的背景信息,也可以在一定程度上实现去噪功能,3×3的卷积核可以在保持原始数据的纹理信息基础上减少特征损失。
图3
2.2 MorphACWE轮廓模型
无边界主动轮廓模型(Active Contours without Edges,ACWE)是一种全局最优的轮廓提取模型,于2001年由Chan和Vese提出[20],故又称CV模型。CV模型假设图像可以分为均匀同质区域,利用目标和背景的灰度值与各自对应的平均灰度值差的平方来构建驱动函数。
假设一幅图像为
式中: C为轮廓曲线内区域;
公式右侧第一和第二项均为轮廓曲线内力,在迭代过程中可以控制过分割和误分割产生的多余轮廓; 第三项和第四项为外力,用来引导曲线收敛到目标边界处。
当F(C)取最小值时,轮廓线即为实际区域边界。引入水平集可简化极小化能量函数,演化曲线用水平集函数
值得注意的是原始CV模型需要使用数值积分方法来求解偏微分方程和水平集,计算成本相对较高,且存在一定稳定性问题。基于此,2014年Marquez-Neila P等[21]提出一种基于曲率形态算子的无边界主动轮廓模型(MorphACWE) ,通过在二元水平集上定义一组具有等价无穷小行为的形态算子来实现偏微分方程的数值解。
假设第n次迭代后轮廓曲线变为
式中:
2.3 FR-MorphACWE算法构建
现有算法通过低维或高维特征单一分析水体提取,已实现较高准确度的SAR图像湖泊提取,但当处理大范围多湖泊提取时,部分算法会受相似特征地物干扰,影响最终提取准确度; 此外尝试将高维深层特征与低维特征结合可以使分类精度进一步提升。
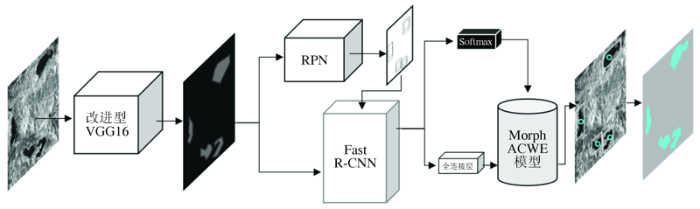
基于上述问题,本文提出的FR-MorphACWE(Faster Region-based Convolution Neural Network-MorphACWE)算法以改进的Faster R-CNN目标检测算法和MorphACWE轮廓模型为基础进行构建。首先利用改进型Faster R-CNN对训练集数据进行训练,利用训练结果模型对检测数据进行分类检测,删去原有算法中的识别输出层,对接MorphACWE模型,直接将识别区域的中心点坐标位置作为轮廓曲线膨胀初始点,再通过轮廓曲线的内外力引导膨胀,最终迭代出最佳轮廓线,精准划分湖泊边界,实现湖泊与非湖泊的语义分割,架构如图4所示。上述模型设计既可以保留原有Faster R-CNN目标识别的准确度,同时由于直接输出识别区域中心点,避免了候选框与初始回归位置的偏差; 此外利用MorphACWE模型提取轮廓可以较好地保证目标的内部同质性和空间一致性。
图4
3 实验与分析
3.1 实验步骤
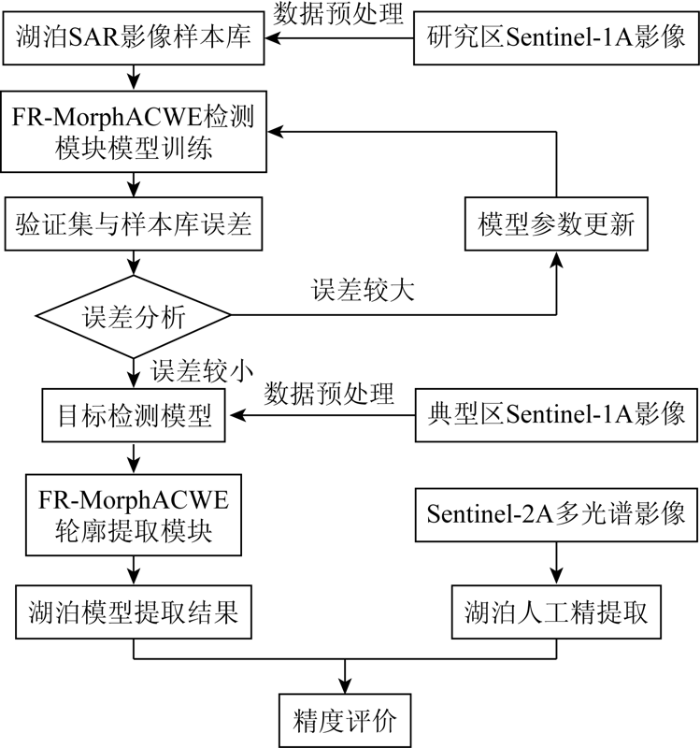
为验证本文方法有效性,具体实验步骤(图5)共分以下3步。第一,对研究区内Sentinel-1A影像进行预处理,裁剪为小块后建立L-SAR数据集进行检测模型训练; 第二,利用引言中所提到SAR图像湖泊提取发展各阶段典型算法: OTSU阈值分割算法、模糊C均值分类、Mask R-CNN算法和本文提出FR-MorphACWE算法从综合干扰下的多湖泊提取角度进行分类实验; 第三通过计算准确率、精准率、召回率、F1分数和Kappa系数实现湖泊提取效果定量评价。
图5
3.2 模型训练与超参数设置
3.2.1 L-SAR数据集
样本集是深度学习模型的血液。本文以PASCAL VOC数据集为蓝本构建高原湖泊SAR数据集(L-SAR数据集),数据源为13景完成预处理后的Sentinel-1A影像,选取大小湖泊共73个,利用图像裁剪和数据增强处理共生成样本数据共1 200景,训练湖泊累计1 872个,单景样本数据尺寸在147像元×285像元到357像元×500像元范围内且保持每景中存在1~5个湖泊。为使最终输出模型拥有更好鲁棒性,L-SAR数据集包含不同极化方式、尺寸和区域位置等成像条件的样本数据。将数据集中的960景作为Faster R-CNN的训练数据集(占比70%),240景作为测试数据集(占比20%),120景作为验证数据集(占比10%)。
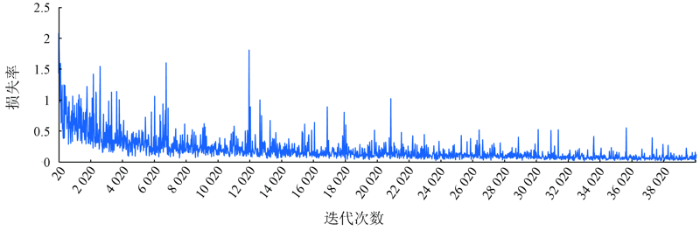
3.2.2 模型超参数及训练
表2 FR-MorphACWE超参数设置表
Tab.2
| 参数 | 基础学 习速率 | 动量 | 子训 练集 | IOU 阈值 | 检测模 型训练 次数 | Morph ACWE 模型迭 代次数 |
|---|---|---|---|---|---|---|
| 取值 | 0.001 | 0.9 | 256 | 0.7 | 40 000 | 700 |
图6
3.3 综合干扰多湖泊提取
图7
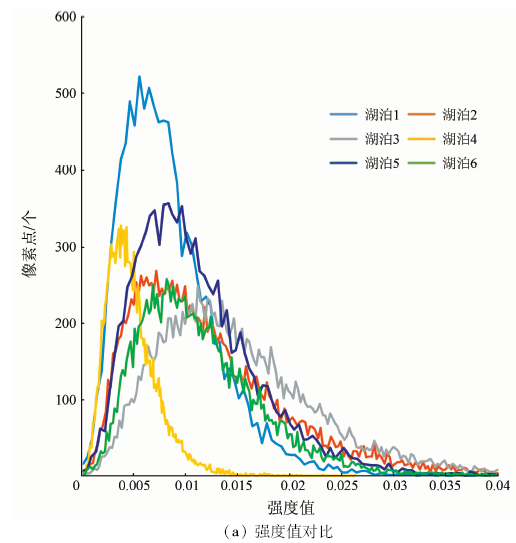
表3 各分类方法提取结果对比
Tab.3
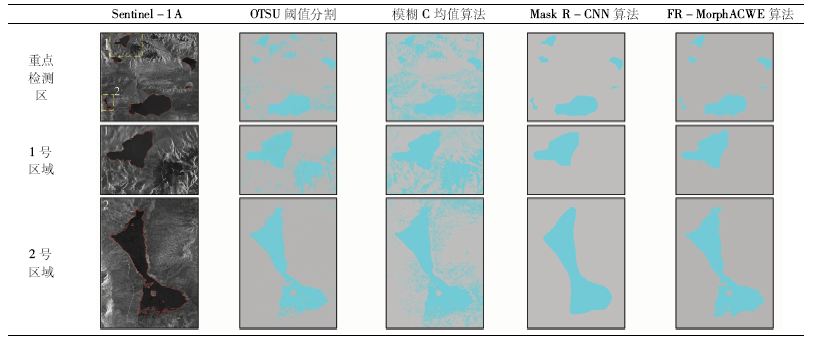 |
表4 各分类方法精度对比
Tab.4
| 分类方法 | 准确率/% | 精准率/% | 召回率/% | F1分数 | Kappa系数 |
|---|---|---|---|---|---|
| OTSU阈值分割 | 94.612 2 | 92.518 4 | 69.244 7 | 79.207 3 | 0.761 9 |
| 模糊C均值算法 | 85.215 2 | 96.671 9 | 42.655 4 | 59.192 7 | 0.517 7 |
| Mask R-CNN算法 | 98.791 0 | 94.686 3 | 94.429 4 | 94.557 7 | 0.938 8 |
| FR-Morph-ACWE算法 | 99.716 4 | 98.809 7 | 98.636 4 | 98.723 0 | 0.985 6 |
图8
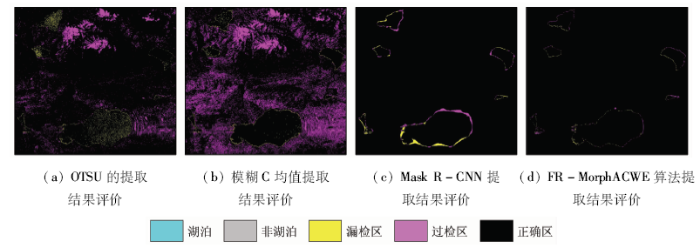
图8
各分类方法结果与真实值差异图
Fig.8
Difference between the results of each classification method and the true value
模糊C均值算法分类结果准确率低于其他3种分类算法,召回率低于50%,研究区北部几乎无法实现干扰排除,大量高原冰川被划分为湖泊,且多湖泊内部同质性受噪声影响明显。主要原因为模糊C均值算法是一种无监督聚类算法,通过迭代求解目标函数最小化的过程来确定每一个样本分类隶属度,其对初始值和噪声值非常敏感,迭代极易陷入局部极值, 导致偏离全局最优。
Mask R-CNN实例分割算法是基于Faster R-CNN的重要改进算法,整体框架与Faster R-CNN保持一致,其创新性地加入了全连接的分割子网,实现了目标的实例分割。由于挖掘地物高维特征信息,结果准确度相较于OTSU阈值分割算法和模糊C均值算法有大幅提升,湖泊内部同质性非常强。其准确度高达98.79%,精准率和召回率也均高于94%,证明了提升高维特征挖掘能力对提取精度的显著影响。但从图8中不难发现,其分类结果中的湖泊边界较为圆滑,与真实情况差距较大,未实现精准湖泊边界勾画,湖泊内湖心岛也被误分为湖泊。其原因主要由于分割子网利用反卷积操作来实现湖泊面提取,无法提供精度更高的边界信息。
结合深度学习高维特征分析和边缘轮廓模型目标边缘分割算法的FR-MorphACWE算法最大特点在于自适应能力较强,在处理综合干扰下的多湖泊提取情况下分类精度达到99%以上,且精准率和召回率均保持在98%以上,均明显高于其他3种分类算法。由于结合了MorphACWE轮廓模型的边缘提取算法,湖泊外部轮廓清晰、内部同质性较强,不会受到影像椒盐噪声的影响。此外本文提出算法运行步骤较少,人为后续干预度低,优势更为明显。
4 结论
本文提出的FR-MorphACWE算法综合改进型Faster R-CNN目标检测算法的高维特征分析和MorphACWE轮廓模型的边界提取算法,实现了SAR图像的高原湖泊端对端语义分割。本文在西藏自治区那曲市南部至日喀则市北部展开实验,实现了多干扰、大尺度影响下的高精度湖泊提取,通过与OTSU阈值分割、模糊C均值和Mask R-CNN算法的对比可明显发现,本文提出的FR-MorphACWE算法整体参数设置少、需求数据量小、运行周期短、自适应能力强、泛化性能好,可以作为SAR图像湖泊提取的新算法加以推广和应用。
本文FR-MorphACWE算法的普适性还有待在中国地形二级阶梯和三级阶梯湖泊密集区做进一步检验,同时在下一阶段的研究中可选择以多源遥感数据作为数据源,在高准确度提取的基础上,实现多时相变化检测。
参考文献
中国科学家发起“第三极水塔计划”
.[EB/OL](
Chinese scientists launched the third pole water tower project
.[EB/OL](
2000—2012年青藏高原湖泊水面时空过程数据集遥感提取
[J].
DOI:10.6046/gtzyyg.2016.03.28
URL
[本文引用: 1]

2湖泊水面数据集。精度分析结果表明,该文方法提取结果相对于研究中基于30 m空间分辨率Landsat TM得到的133个抽样湖泊水面面积结果,总精度为93.98%;与近年来其他研究人员在纳木错、青海湖和色林错等典型湖泊得到的遥感监测结果对比,无论在日、月及年尺度上,均具有非常高的一致性;而与第二次全国湖泊调查结果相比,整个高原区面积大于1 km2的湖泊数量仅相差11个、面积误差仅为4.74%。该论文为大范围、长时间序列单一地物(水面、植被、城镇等)分布面积提取提供了方法参考,也为开展青藏高原近10a多来湖泊变化研究提供了可靠的基础数据。]]>
Extraction of the spatial-temporal lake water surface dataset in the Tibetan Plateau over the past 10 years
[J].
卫星雷达干涉测量原理与应用
[J].
Principles and applications of interferometry SAR
[J].
典型Otsu算法阈值比较及其SAR图像水域分割性能分析
[J].
DOI:10.3724/SP.J.1146.2009.01426
URL
[本文引用: 1]
遥感图像中水域呈现低灰度、灰度起伏小特性。该文从实时性出发,采用1维Otsu算法分割SAR图像。证明了两种典型Otsu分割算法的阈值关系,提出了分割性能评估方法,并通过实测SAR图像对比分析了多阈值分割与单阈值递归分割的水域分割性能。结果表明,与单阈值递归分割相比,多阈值分割能够更好地提取水域轮廓,且漏警率低,可应用于桥梁自动目标识别和景象匹配等方面。
Otsu threshold comparison and SAR water segmentation result analysis
[J].
基于混合阈值法的Envisat影像水体提取
[J].
A hybird thresholding method for water extraction in Envisat image
[J].
Surface water body detection in high-resolution TerraSAR-X data using active contour models
[C]//
基于SAR数据的鄱阳湖水体提取及变化监测研究
[J].
Water area extraction and change detection of the Poyang Lake using SAR data
[J].
Assessing integration of intensity,polarimetric scattering,interferometric coherence and spatial texture metrics in PALSAR-derived land cover classification
[J].
结合纹理与极化分解的面向对象极化SAR水体提取方法
[J].
An object-oriented water extraction method based on texture and polarimetric decomposition feature
[J].
一种改进的变化检测方法及其在洪水监测中的应用
[J].
Improved change detection method for flood monitoring
[J].
River extraction from high-resolution SAR images combining a structural feature set and mathematical morphology
[J].
Dynamic waterline mapping of inland great lakes using time-series SAR data from GF-3 and S-1A satellites:A case study of DJK reservoir,China
[J].
Efficent extraction of Daihai Lake based on neural network algorithrn from high resolution SAR Image.2018 Progress in Electromagnetics Research Symposium (PIERS-Toyama),AUG 1-4,2018
[C].
Quaternion neural-network-based PolSAR land classification in poincare-sphere-parameter space
[J].
Applied method for water-body segmentation based on mask R-CNN
[J].
Mask R-CNN
[J].
Faster R-CNN:Towards real-time object detection with region proposal networks
[J].
DOI:10.1109/TPAMI.2016.2577031
URL
PMID:27295650
[本文引用: 1]
State-of-the-art object detection networks depend on region proposal algorithms to hypothesize object locations. Advances like SPPnet [1] and Fast R-CNN [2] have reduced the running time of these detection networks, exposing region proposal computation as a bottleneck. In this work, we introduce a Region Proposal Network (RPN) that shares full-image convolutional features with the detection network, thus enabling nearly cost-free region proposals. An RPN is a fully convolutional network that simultaneously predicts object bounds and objectness scores at each position. The RPN is trained end-to-end to generate high-quality region proposals, which are used by Fast R-CNN for detection. We further merge RPN and Fast R-CNN into a single network by sharing their convolutional features-using the recently popular terminology of neural networks with 'attention' mechanisms, the RPN component tells the unified network where to look. For the very deep VGG-16 model [3] , our detection system has a frame rate of 5 fps (including all steps) on a GPU, while achieving state-of-the-art object detection accuracy on PASCAL VOC 2007, 2012, and MS COCO datasets with only 300 proposals per image. In ILSVRC and COCO 2015 competitions, Faster R-CNN and RPN are the foundations of the 1st-place winning entries in several tracks. Code has been made publicly available.
DeepLab:Semantic image segmentation with deep convolutional nets,atrous convolution,and fully connected CRFs
[J].
Active contours without edges
[J].
DOI:10.1109/83.902291
URL
PMID:18249617
[本文引用: 1]
We propose a new model for active contours to detect objects in a given image, based on techniques of curve evolution, Mumford-Shah (1989) functional for segmentation and level sets. Our model can detect objects whose boundaries are not necessarily defined by the gradient. We minimize an energy which can be seen as a particular case of the minimal partition problem. In the level set formulation, the problem becomes a
A Morphological approach to curvature-based evolution of curves and surfaces
[J].
DOI:10.1109/TPAMI.2013.106
URL
PMID:24231862
[本文引用: 1]
We introduce new results connecting differential and morphological operators that provide a formal and theoretically grounded approach for stable and fast contour evolution. Contour evolution algorithms have been extensively used for boundary detection and tracking in computer vision. The standard solution based on partial differential equations and level-sets requires the use of numerical methods of integration that are costly computationally and may have stability issues. We present a morphological approach to contour evolution based on a new curvature morphological operator valid for surfaces of any dimension. We approximate the numerical solution of the curve evolution PDE by the successive application of a set of morphological operators defined on a binary level-set and with equivalent infinitesimal behavior. These operators are very fast, do not suffer numerical stability issues, and do not degrade the level set function, so there is no need to reinitialize it. Moreover, their implementation is much easier since they do not require the use of sophisticated numerical algorithms. We validate the approach providing a morphological implementation of the geodesic active contours, the active contours without borders, and turbopixels. In the experiments conducted, the morphological implementations converge to solutions equivalent to those achieved by traditional numerical solutions, but with significant gains in simplicity, speed, and stability.
基于粗糙集和新能量公式的水平集图像分割
[J].
Level set image segmentation based on rough set and new energy formula
[J].
基于KFCM改进CV模型的SplitBregman图像分割方法
[J].
A Split Bregman image segmentation method based on KFCM and improved CV model
[J].
SAR干涉测量的相干性特征分析及积雪划分
[J].
SAR Interferometry coherence analysis and snow mapping
[J].

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}