Modeling and mapping of soil salinity with reflectance spectroscopy and Landsat data using two quantitative methods (PLSR and MARS)
2
2014
... 土壤盐渍化是一个世界性问题,是土壤中盐分积聚形成盐渍土的过程,广泛发生在内陆干旱地区和滨海地区[1⇓-3].自然或人为过程引起的土壤盐渍化是一种重大的环境灾害[4],全球主要盐渍化土壤范围约为9.55亿hm2,而次生盐渍化约为0.77亿hm2,其中58%在灌区[5].土壤盐渍化在不同程度上影响了1/3以上的陆地河流流域[6].盐渍化的主要负面影响是限制植物的吸水和蒸散,降低土壤肥力,导致农作物减产[7-8],直接影响人们的生活.因此,土壤盐渍化的动态监测尤为重要. ...
... 除上述模型外一些新型模型与改进模型也被用于遥感监测模型的构建,如逐步多元回归(stepwise multiple regression analysis,SMR)模型[17,35,64]、岭回归模型(ridge regression,RR)模型[65-66]、普通最小二乘法(ordinary least square,OLS)[67-68]、空间自回归(spatial autore gression,SAR)模型[56]、决策树算法(decision tree algorithm,DTA)[67]、支持向量回归(support vector regression,SVR)模型[12,25,69]、粒子群优化支持向量机(particle swarm optimization support vector machine,PSO-SVM)模型[15,70]、网格搜索支持向量机(grid search support vector machine, GS-SVM)[71]、差分进化支持向量机(differential evolution support vector machine,DE-SVM)模型 [15]、卷积神经网络(convolutional neural network,CNN)模型[70]、多元自适应回归样条(multivariate adaptive regression spline,MARS)模型[1,25,72]、人工神经网络(artificial neural network,ANN)模型[7,26]、Bootstrap-BP神经网络模型[43]、极限学习机(extra learning machine,ELM)[61,73]、结构方程模型[74](structural equation model,SEM)、溶质运移模型[28]、地理加权回归(geographically weighted regression,GWR)模型[24,66]、多布森模型(Dobson model)[75]和修正的残差克里金模型[76]等模型. ...
小开河引黄灌区土壤盐渍化定量遥感反演
2
2019
... 土壤盐渍化是一个世界性问题,是土壤中盐分积聚形成盐渍土的过程,广泛发生在内陆干旱地区和滨海地区[1⇓-3].自然或人为过程引起的土壤盐渍化是一种重大的环境灾害[4],全球主要盐渍化土壤范围约为9.55亿hm2,而次生盐渍化约为0.77亿hm2,其中58%在灌区[5].土壤盐渍化在不同程度上影响了1/3以上的陆地河流流域[6].盐渍化的主要负面影响是限制植物的吸水和蒸散,降低土壤肥力,导致农作物减产[7-8],直接影响人们的生活.因此,土壤盐渍化的动态监测尤为重要. ...
... 2)多元线性回归模型(multiple linear regression model,MLR)是将多个变量进行最优组合来预测因变量,原理简单,应用广泛[2,8-9,17,22,24,40⇓-42,56,58-59],其公式为: ...
小开河引黄灌区土壤盐渍化定量遥感反演
2
2019
... 土壤盐渍化是一个世界性问题,是土壤中盐分积聚形成盐渍土的过程,广泛发生在内陆干旱地区和滨海地区[1⇓-3].自然或人为过程引起的土壤盐渍化是一种重大的环境灾害[4],全球主要盐渍化土壤范围约为9.55亿hm2,而次生盐渍化约为0.77亿hm2,其中58%在灌区[5].土壤盐渍化在不同程度上影响了1/3以上的陆地河流流域[6].盐渍化的主要负面影响是限制植物的吸水和蒸散,降低土壤肥力,导致农作物减产[7-8],直接影响人们的生活.因此,土壤盐渍化的动态监测尤为重要. ...
... 2)多元线性回归模型(multiple linear regression model,MLR)是将多个变量进行最优组合来预测因变量,原理简单,应用广泛[2,8-9,17,22,24,40⇓-42,56,58-59],其公式为: ...
A review of remote sensing challenges for food security with respect to salinity and drought threats
1
2020
... 土壤盐渍化是一个世界性问题,是土壤中盐分积聚形成盐渍土的过程,广泛发生在内陆干旱地区和滨海地区[1⇓-3].自然或人为过程引起的土壤盐渍化是一种重大的环境灾害[4],全球主要盐渍化土壤范围约为9.55亿hm2,而次生盐渍化约为0.77亿hm2,其中58%在灌区[5].土壤盐渍化在不同程度上影响了1/3以上的陆地河流流域[6].盐渍化的主要负面影响是限制植物的吸水和蒸散,降低土壤肥力,导致农作物减产[7-8],直接影响人们的生活.因此,土壤盐渍化的动态监测尤为重要. ...
Soil salinity inversion based on differentiated fusion of satellite image and ground spectra
2
2021
... 土壤盐渍化是一个世界性问题,是土壤中盐分积聚形成盐渍土的过程,广泛发生在内陆干旱地区和滨海地区[1⇓-3].自然或人为过程引起的土壤盐渍化是一种重大的环境灾害[4],全球主要盐渍化土壤范围约为9.55亿hm2,而次生盐渍化约为0.77亿hm2,其中58%在灌区[5].土壤盐渍化在不同程度上影响了1/3以上的陆地河流流域[6].盐渍化的主要负面影响是限制植物的吸水和蒸散,降低土壤肥力,导致农作物减产[7-8],直接影响人们的生活.因此,土壤盐渍化的动态监测尤为重要. ...
... 利用遥感数据定量评价土壤盐渍化的核心是找出相关指标的含量与遥感数据之间的关系,因此,利用遥感技术研究土壤盐渍化的目的是建立一个可靠的估算模型[21-22].土壤盐渍化反演遥感模型的建立需要探求土壤实际含盐量、盐渍化程度以及盐渍土类型与遥感数据不同波段、波段组合及其他遥感参数之间的关系[23-24],因此需要获取土壤含盐量及实际理化性质的量化数值,利用统计学等方法建立与遥感数据的光谱信息数值之间线性或非线性模型[25-26],并对模型进行精度验证,精度较高的模型在很大程度上可用于该研究区内土壤盐渍化情况的监测[4,27].遥感监测模型构建方法在步骤上存在一定的差异,但总体流程是一致的,其目的是为了获取更高精度的反演模型,用以评估区域盐渍化状况[11]. ...
Remote sensing of soil salinity:Potentials and constraints
1
2003
... 土壤盐渍化是一个世界性问题,是土壤中盐分积聚形成盐渍土的过程,广泛发生在内陆干旱地区和滨海地区[1⇓-3].自然或人为过程引起的土壤盐渍化是一种重大的环境灾害[4],全球主要盐渍化土壤范围约为9.55亿hm2,而次生盐渍化约为0.77亿hm2,其中58%在灌区[5].土壤盐渍化在不同程度上影响了1/3以上的陆地河流流域[6].盐渍化的主要负面影响是限制植物的吸水和蒸散,降低土壤肥力,导致农作物减产[7-8],直接影响人们的生活.因此,土壤盐渍化的动态监测尤为重要. ...
River basin salinization as a form of aridity
2
2020
... 土壤盐渍化是一个世界性问题,是土壤中盐分积聚形成盐渍土的过程,广泛发生在内陆干旱地区和滨海地区[1⇓-3].自然或人为过程引起的土壤盐渍化是一种重大的环境灾害[4],全球主要盐渍化土壤范围约为9.55亿hm2,而次生盐渍化约为0.77亿hm2,其中58%在灌区[5].土壤盐渍化在不同程度上影响了1/3以上的陆地河流流域[6].盐渍化的主要负面影响是限制植物的吸水和蒸散,降低土壤肥力,导致农作物减产[7-8],直接影响人们的生活.因此,土壤盐渍化的动态监测尤为重要. ...
... 以往的土壤盐渍化监测体系主要基于人工样点调查,费时费力,难以获取大面积宏观尺度的变化特性[9⇓-11].尤其在下垫面条件复杂、自然环境恶劣地区,监测站点布设不足,野外考察难度大,传统监测手段更难以满足需求[6,12].遥感卫星能够对特定区域进行不同尺度上可靠、持续的影像观测,过去10 a间,已经快速发展成为监测土壤盐渍化程度及分布的重要工具[13⇓-15].单时相的卫星影像可以客观地揭示某一时刻大范围区域内土壤质地空间差异,多时相的卫星影像则可以对同一区域不同时间变化规律进行比较分析[16-17].近年来,随着对地观测技术的发展,遥感数据的光谱信息逐渐丰富,时空分辨率不断提升,能够实现对地高精度、高重访(高时效)、多尺度、全天候观测,大大提高了遥感监测能力[18-19].利用多时相遥感影像,能够对不同地区土壤盐渍化参数进行定量反演,实现盐渍化土壤的动态监测和分析[17,20]. ...
Regional suitability prediction of soil salinization based on remote-sensing derivatives and optimal spectral index
4
2021
... 土壤盐渍化是一个世界性问题,是土壤中盐分积聚形成盐渍土的过程,广泛发生在内陆干旱地区和滨海地区[1⇓-3].自然或人为过程引起的土壤盐渍化是一种重大的环境灾害[4],全球主要盐渍化土壤范围约为9.55亿hm2,而次生盐渍化约为0.77亿hm2,其中58%在灌区[5].土壤盐渍化在不同程度上影响了1/3以上的陆地河流流域[6].盐渍化的主要负面影响是限制植物的吸水和蒸散,降低土壤肥力,导致农作物减产[7-8],直接影响人们的生活.因此,土壤盐渍化的动态监测尤为重要. ...
... 实测土壤含盐量是遥感监测模型建立的基础,是进行建模因子优选以及模型精度验证的依据,其一般获取方法是野外采集,在样本采集过程中使用全球定位系统(global positioning system,GPS)仪记录土壤坐标位置信息,将野外采集的土壤样本带回实验室进行测定实验.具体采样过程中,需要采集表层及地下不同深度的盐渍土,一般采用多点采样法,将采集到的样品封装后带回实验室,经过风干、研磨、过筛获得盐渍土细土样品,之后配置土壤溶液使用电导率仪测定土壤电导率、pH值及主要离子含量[7],或采用残渣烘干法获得土壤盐分含量及含水量[9],也可以使用电磁感应法和接触电极法测定土壤电导率,如土壤传感电磁感应GER3700和FieldSpec FR设备以及EM38来获取表征土壤盐分的数据[28-29],还有部分学者使用仪器85070E介电常数测量套件测定土壤介电常数来探讨其与土壤含盐量之间的关系[30]. ...
... 单个波段所包含的光谱信息是有限的,因此在提取遥感影像的波段光谱反射率后可进行不同波段之间的组合运算,这些指数通常是已有研究得出的先验计算公式(表1),也可以使用不同的数学运算组合计算得到,包括差异指数(differentation index,DI)、比率指数(ratio index,RI)、归一化差异指数(normalized difference index,NDI)和土壤指数(soil index,SI)的二维波段组合光谱指数,也包括部分三维波段组合指数(three dimensional band combination index,TBI),通过这些组合可构建功能强大的光谱组合搜索模型[7,43].计算公式分别为: ...
... 除上述模型外一些新型模型与改进模型也被用于遥感监测模型的构建,如逐步多元回归(stepwise multiple regression analysis,SMR)模型[17,35,64]、岭回归模型(ridge regression,RR)模型[65-66]、普通最小二乘法(ordinary least square,OLS)[67-68]、空间自回归(spatial autore gression,SAR)模型[56]、决策树算法(decision tree algorithm,DTA)[67]、支持向量回归(support vector regression,SVR)模型[12,25,69]、粒子群优化支持向量机(particle swarm optimization support vector machine,PSO-SVM)模型[15,70]、网格搜索支持向量机(grid search support vector machine, GS-SVM)[71]、差分进化支持向量机(differential evolution support vector machine,DE-SVM)模型 [15]、卷积神经网络(convolutional neural network,CNN)模型[70]、多元自适应回归样条(multivariate adaptive regression spline,MARS)模型[1,25,72]、人工神经网络(artificial neural network,ANN)模型[7,26]、Bootstrap-BP神经网络模型[43]、极限学习机(extra learning machine,ELM)[61,73]、结构方程模型[74](structural equation model,SEM)、溶质运移模型[28]、地理加权回归(geographically weighted regression,GWR)模型[24,66]、多布森模型(Dobson model)[75]和修正的残差克里金模型[76]等模型. ...
多源数据的区域土壤盐渍化精确评估
2
2018
... 土壤盐渍化是一个世界性问题,是土壤中盐分积聚形成盐渍土的过程,广泛发生在内陆干旱地区和滨海地区[1⇓-3].自然或人为过程引起的土壤盐渍化是一种重大的环境灾害[4],全球主要盐渍化土壤范围约为9.55亿hm2,而次生盐渍化约为0.77亿hm2,其中58%在灌区[5].土壤盐渍化在不同程度上影响了1/3以上的陆地河流流域[6].盐渍化的主要负面影响是限制植物的吸水和蒸散,降低土壤肥力,导致农作物减产[7-8],直接影响人们的生活.因此,土壤盐渍化的动态监测尤为重要. ...
... 2)多元线性回归模型(multiple linear regression model,MLR)是将多个变量进行最优组合来预测因变量,原理简单,应用广泛[2,8-9,17,22,24,40⇓-42,56,58-59],其公式为: ...
多源数据的区域土壤盐渍化精确评估
2
2018
... 土壤盐渍化是一个世界性问题,是土壤中盐分积聚形成盐渍土的过程,广泛发生在内陆干旱地区和滨海地区[1⇓-3].自然或人为过程引起的土壤盐渍化是一种重大的环境灾害[4],全球主要盐渍化土壤范围约为9.55亿hm2,而次生盐渍化约为0.77亿hm2,其中58%在灌区[5].土壤盐渍化在不同程度上影响了1/3以上的陆地河流流域[6].盐渍化的主要负面影响是限制植物的吸水和蒸散,降低土壤肥力,导致农作物减产[7-8],直接影响人们的生活.因此,土壤盐渍化的动态监测尤为重要. ...
... 2)多元线性回归模型(multiple linear regression model,MLR)是将多个变量进行最优组合来预测因变量,原理简单,应用广泛[2,8-9,17,22,24,40⇓-42,56,58-59],其公式为: ...
OLI与HSI影像融合的土壤盐分反演模型
3
2017
... 以往的土壤盐渍化监测体系主要基于人工样点调查,费时费力,难以获取大面积宏观尺度的变化特性[9⇓-11].尤其在下垫面条件复杂、自然环境恶劣地区,监测站点布设不足,野外考察难度大,传统监测手段更难以满足需求[6,12].遥感卫星能够对特定区域进行不同尺度上可靠、持续的影像观测,过去10 a间,已经快速发展成为监测土壤盐渍化程度及分布的重要工具[13⇓-15].单时相的卫星影像可以客观地揭示某一时刻大范围区域内土壤质地空间差异,多时相的卫星影像则可以对同一区域不同时间变化规律进行比较分析[16-17].近年来,随着对地观测技术的发展,遥感数据的光谱信息逐渐丰富,时空分辨率不断提升,能够实现对地高精度、高重访(高时效)、多尺度、全天候观测,大大提高了遥感监测能力[18-19].利用多时相遥感影像,能够对不同地区土壤盐渍化参数进行定量反演,实现盐渍化土壤的动态监测和分析[17,20]. ...
... 实测土壤含盐量是遥感监测模型建立的基础,是进行建模因子优选以及模型精度验证的依据,其一般获取方法是野外采集,在样本采集过程中使用全球定位系统(global positioning system,GPS)仪记录土壤坐标位置信息,将野外采集的土壤样本带回实验室进行测定实验.具体采样过程中,需要采集表层及地下不同深度的盐渍土,一般采用多点采样法,将采集到的样品封装后带回实验室,经过风干、研磨、过筛获得盐渍土细土样品,之后配置土壤溶液使用电导率仪测定土壤电导率、pH值及主要离子含量[7],或采用残渣烘干法获得土壤盐分含量及含水量[9],也可以使用电磁感应法和接触电极法测定土壤电导率,如土壤传感电磁感应GER3700和FieldSpec FR设备以及EM38来获取表征土壤盐分的数据[28-29],还有部分学者使用仪器85070E介电常数测量套件测定土壤介电常数来探讨其与土壤含盐量之间的关系[30]. ...
... 2)多元线性回归模型(multiple linear regression model,MLR)是将多个变量进行最优组合来预测因变量,原理简单,应用广泛[2,8-9,17,22,24,40⇓-42,56,58-59],其公式为: ...
OLI与HSI影像融合的土壤盐分反演模型
3
2017
... 以往的土壤盐渍化监测体系主要基于人工样点调查,费时费力,难以获取大面积宏观尺度的变化特性[9⇓-11].尤其在下垫面条件复杂、自然环境恶劣地区,监测站点布设不足,野外考察难度大,传统监测手段更难以满足需求[6,12].遥感卫星能够对特定区域进行不同尺度上可靠、持续的影像观测,过去10 a间,已经快速发展成为监测土壤盐渍化程度及分布的重要工具[13⇓-15].单时相的卫星影像可以客观地揭示某一时刻大范围区域内土壤质地空间差异,多时相的卫星影像则可以对同一区域不同时间变化规律进行比较分析[16-17].近年来,随着对地观测技术的发展,遥感数据的光谱信息逐渐丰富,时空分辨率不断提升,能够实现对地高精度、高重访(高时效)、多尺度、全天候观测,大大提高了遥感监测能力[18-19].利用多时相遥感影像,能够对不同地区土壤盐渍化参数进行定量反演,实现盐渍化土壤的动态监测和分析[17,20]. ...
... 实测土壤含盐量是遥感监测模型建立的基础,是进行建模因子优选以及模型精度验证的依据,其一般获取方法是野外采集,在样本采集过程中使用全球定位系统(global positioning system,GPS)仪记录土壤坐标位置信息,将野外采集的土壤样本带回实验室进行测定实验.具体采样过程中,需要采集表层及地下不同深度的盐渍土,一般采用多点采样法,将采集到的样品封装后带回实验室,经过风干、研磨、过筛获得盐渍土细土样品,之后配置土壤溶液使用电导率仪测定土壤电导率、pH值及主要离子含量[7],或采用残渣烘干法获得土壤盐分含量及含水量[9],也可以使用电磁感应法和接触电极法测定土壤电导率,如土壤传感电磁感应GER3700和FieldSpec FR设备以及EM38来获取表征土壤盐分的数据[28-29],还有部分学者使用仪器85070E介电常数测量套件测定土壤介电常数来探讨其与土壤含盐量之间的关系[30]. ...
... 2)多元线性回归模型(multiple linear regression model,MLR)是将多个变量进行最优组合来预测因变量,原理简单,应用广泛[2,8-9,17,22,24,40⇓-42,56,58-59],其公式为: ...
Satellite thermography for soil salinity assessment of cropped areas in Uzbekistan
1
2017
... 以往的土壤盐渍化监测体系主要基于人工样点调查,费时费力,难以获取大面积宏观尺度的变化特性[9⇓-11].尤其在下垫面条件复杂、自然环境恶劣地区,监测站点布设不足,野外考察难度大,传统监测手段更难以满足需求[6,12].遥感卫星能够对特定区域进行不同尺度上可靠、持续的影像观测,过去10 a间,已经快速发展成为监测土壤盐渍化程度及分布的重要工具[13⇓-15].单时相的卫星影像可以客观地揭示某一时刻大范围区域内土壤质地空间差异,多时相的卫星影像则可以对同一区域不同时间变化规律进行比较分析[16-17].近年来,随着对地观测技术的发展,遥感数据的光谱信息逐渐丰富,时空分辨率不断提升,能够实现对地高精度、高重访(高时效)、多尺度、全天候观测,大大提高了遥感监测能力[18-19].利用多时相遥感影像,能够对不同地区土壤盐渍化参数进行定量反演,实现盐渍化土壤的动态监测和分析[17,20]. ...
Detection and modeling of soil salinity variations in arid lands using remote sensing data
2
2021
... 以往的土壤盐渍化监测体系主要基于人工样点调查,费时费力,难以获取大面积宏观尺度的变化特性[9⇓-11].尤其在下垫面条件复杂、自然环境恶劣地区,监测站点布设不足,野外考察难度大,传统监测手段更难以满足需求[6,12].遥感卫星能够对特定区域进行不同尺度上可靠、持续的影像观测,过去10 a间,已经快速发展成为监测土壤盐渍化程度及分布的重要工具[13⇓-15].单时相的卫星影像可以客观地揭示某一时刻大范围区域内土壤质地空间差异,多时相的卫星影像则可以对同一区域不同时间变化规律进行比较分析[16-17].近年来,随着对地观测技术的发展,遥感数据的光谱信息逐渐丰富,时空分辨率不断提升,能够实现对地高精度、高重访(高时效)、多尺度、全天候观测,大大提高了遥感监测能力[18-19].利用多时相遥感影像,能够对不同地区土壤盐渍化参数进行定量反演,实现盐渍化土壤的动态监测和分析[17,20]. ...
... 利用遥感数据定量评价土壤盐渍化的核心是找出相关指标的含量与遥感数据之间的关系,因此,利用遥感技术研究土壤盐渍化的目的是建立一个可靠的估算模型[21-22].土壤盐渍化反演遥感模型的建立需要探求土壤实际含盐量、盐渍化程度以及盐渍土类型与遥感数据不同波段、波段组合及其他遥感参数之间的关系[23-24],因此需要获取土壤含盐量及实际理化性质的量化数值,利用统计学等方法建立与遥感数据的光谱信息数值之间线性或非线性模型[25-26],并对模型进行精度验证,精度较高的模型在很大程度上可用于该研究区内土壤盐渍化情况的监测[4,27].遥感监测模型构建方法在步骤上存在一定的差异,但总体流程是一致的,其目的是为了获取更高精度的反演模型,用以评估区域盐渍化状况[11]. ...
Combination of proximal and remote sensing methods for rapid soil salinity quantification
2
2015
... 以往的土壤盐渍化监测体系主要基于人工样点调查,费时费力,难以获取大面积宏观尺度的变化特性[9⇓-11].尤其在下垫面条件复杂、自然环境恶劣地区,监测站点布设不足,野外考察难度大,传统监测手段更难以满足需求[6,12].遥感卫星能够对特定区域进行不同尺度上可靠、持续的影像观测,过去10 a间,已经快速发展成为监测土壤盐渍化程度及分布的重要工具[13⇓-15].单时相的卫星影像可以客观地揭示某一时刻大范围区域内土壤质地空间差异,多时相的卫星影像则可以对同一区域不同时间变化规律进行比较分析[16-17].近年来,随着对地观测技术的发展,遥感数据的光谱信息逐渐丰富,时空分辨率不断提升,能够实现对地高精度、高重访(高时效)、多尺度、全天候观测,大大提高了遥感监测能力[18-19].利用多时相遥感影像,能够对不同地区土壤盐渍化参数进行定量反演,实现盐渍化土壤的动态监测和分析[17,20]. ...
... 除上述模型外一些新型模型与改进模型也被用于遥感监测模型的构建,如逐步多元回归(stepwise multiple regression analysis,SMR)模型[17,35,64]、岭回归模型(ridge regression,RR)模型[65-66]、普通最小二乘法(ordinary least square,OLS)[67-68]、空间自回归(spatial autore gression,SAR)模型[56]、决策树算法(decision tree algorithm,DTA)[67]、支持向量回归(support vector regression,SVR)模型[12,25,69]、粒子群优化支持向量机(particle swarm optimization support vector machine,PSO-SVM)模型[15,70]、网格搜索支持向量机(grid search support vector machine, GS-SVM)[71]、差分进化支持向量机(differential evolution support vector machine,DE-SVM)模型 [15]、卷积神经网络(convolutional neural network,CNN)模型[70]、多元自适应回归样条(multivariate adaptive regression spline,MARS)模型[1,25,72]、人工神经网络(artificial neural network,ANN)模型[7,26]、Bootstrap-BP神经网络模型[43]、极限学习机(extra learning machine,ELM)[61,73]、结构方程模型[74](structural equation model,SEM)、溶质运移模型[28]、地理加权回归(geographically weighted regression,GWR)模型[24,66]、多布森模型(Dobson model)[75]和修正的残差克里金模型[76]等模型. ...
Information extraction and dynamic evaluation of soil salinization with a remote sensing method in a typical county on the Huang-Huai-Hai Plain of China
2
2020
... 以往的土壤盐渍化监测体系主要基于人工样点调查,费时费力,难以获取大面积宏观尺度的变化特性[9⇓-11].尤其在下垫面条件复杂、自然环境恶劣地区,监测站点布设不足,野外考察难度大,传统监测手段更难以满足需求[6,12].遥感卫星能够对特定区域进行不同尺度上可靠、持续的影像观测,过去10 a间,已经快速发展成为监测土壤盐渍化程度及分布的重要工具[13⇓-15].单时相的卫星影像可以客观地揭示某一时刻大范围区域内土壤质地空间差异,多时相的卫星影像则可以对同一区域不同时间变化规律进行比较分析[16-17].近年来,随着对地观测技术的发展,遥感数据的光谱信息逐渐丰富,时空分辨率不断提升,能够实现对地高精度、高重访(高时效)、多尺度、全天候观测,大大提高了遥感监测能力[18-19].利用多时相遥感影像,能够对不同地区土壤盐渍化参数进行定量反演,实现盐渍化土壤的动态监测和分析[17,20]. ...
... 4)BP-神经网络被广泛用于土壤盐分反演中[13,60],主要由信号的正向传播和误差的反向传播这2个过程组成.正向传播就是按照输入层、隐藏层和输出层的顺序依次输出,若实际输出值与期望输出值相差较大,则开始进行误差的反向传播,其与正向传播的方向刚好相反,就是将输出误差按照输出层、隐藏层和输入层的顺序输出,以此可对各单元的权重进行修正,通过不断修正,减少实际输出值与期望输出值的差距,从而达到预测的目的. ...
Soil salinity inversion in coastal corn planting areas by the satellite-UAV-ground integration approach
2
2021
... 以往的土壤盐渍化监测体系主要基于人工样点调查,费时费力,难以获取大面积宏观尺度的变化特性[9⇓-11].尤其在下垫面条件复杂、自然环境恶劣地区,监测站点布设不足,野外考察难度大,传统监测手段更难以满足需求[6,12].遥感卫星能够对特定区域进行不同尺度上可靠、持续的影像观测,过去10 a间,已经快速发展成为监测土壤盐渍化程度及分布的重要工具[13⇓-15].单时相的卫星影像可以客观地揭示某一时刻大范围区域内土壤质地空间差异,多时相的卫星影像则可以对同一区域不同时间变化规律进行比较分析[16-17].近年来,随着对地观测技术的发展,遥感数据的光谱信息逐渐丰富,时空分辨率不断提升,能够实现对地高精度、高重访(高时效)、多尺度、全天候观测,大大提高了遥感监测能力[18-19].利用多时相遥感影像,能够对不同地区土壤盐渍化参数进行定量反演,实现盐渍化土壤的动态监测和分析[17,20]. ...
... 近年来,随着遥感技术的不断发展以及无人机技术的日趋成熟,将无人机与遥感传感器结合,形成的无人机遥感监测手段在土壤盐渍化监测领域正在得到越来越广泛的应用.由于无人机遥感相对于近地遥感而言,具有大区域监测的优势,同时相比卫星遥感,影像的分辨率又有所提升,因此是广域范围内低成本监测土壤盐渍化的一种有效手段,在精准遥感监测领域具有较大的应用潜力[39].目前用于土壤盐渍化遥感监测研究的无人机传感器主要为美国Tetracam公司生产的Micro-MCA多光谱相机[40]以及多光谱相机(ParrotS)[14]等. ...
Soil salinity inversion based on novel spectral index
3
2021
... 以往的土壤盐渍化监测体系主要基于人工样点调查,费时费力,难以获取大面积宏观尺度的变化特性[9⇓-11].尤其在下垫面条件复杂、自然环境恶劣地区,监测站点布设不足,野外考察难度大,传统监测手段更难以满足需求[6,12].遥感卫星能够对特定区域进行不同尺度上可靠、持续的影像观测,过去10 a间,已经快速发展成为监测土壤盐渍化程度及分布的重要工具[13⇓-15].单时相的卫星影像可以客观地揭示某一时刻大范围区域内土壤质地空间差异,多时相的卫星影像则可以对同一区域不同时间变化规律进行比较分析[16-17].近年来,随着对地观测技术的发展,遥感数据的光谱信息逐渐丰富,时空分辨率不断提升,能够实现对地高精度、高重访(高时效)、多尺度、全天候观测,大大提高了遥感监测能力[18-19].利用多时相遥感影像,能够对不同地区土壤盐渍化参数进行定量反演,实现盐渍化土壤的动态监测和分析[17,20]. ...
... 除上述模型外一些新型模型与改进模型也被用于遥感监测模型的构建,如逐步多元回归(stepwise multiple regression analysis,SMR)模型[17,35,64]、岭回归模型(ridge regression,RR)模型[65-66]、普通最小二乘法(ordinary least square,OLS)[67-68]、空间自回归(spatial autore gression,SAR)模型[56]、决策树算法(decision tree algorithm,DTA)[67]、支持向量回归(support vector regression,SVR)模型[12,25,69]、粒子群优化支持向量机(particle swarm optimization support vector machine,PSO-SVM)模型[15,70]、网格搜索支持向量机(grid search support vector machine, GS-SVM)[71]、差分进化支持向量机(differential evolution support vector machine,DE-SVM)模型 [15]、卷积神经网络(convolutional neural network,CNN)模型[70]、多元自适应回归样条(multivariate adaptive regression spline,MARS)模型[1,25,72]、人工神经网络(artificial neural network,ANN)模型[7,26]、Bootstrap-BP神经网络模型[43]、极限学习机(extra learning machine,ELM)[61,73]、结构方程模型[74](structural equation model,SEM)、溶质运移模型[28]、地理加权回归(geographically weighted regression,GWR)模型[24,66]、多布森模型(Dobson model)[75]和修正的残差克里金模型[76]等模型. ...
... [15]、卷积神经网络(convolutional neural network,CNN)模型[70]、多元自适应回归样条(multivariate adaptive regression spline,MARS)模型[1,25,72]、人工神经网络(artificial neural network,ANN)模型[7,26]、Bootstrap-BP神经网络模型[43]、极限学习机(extra learning machine,ELM)[61,73]、结构方程模型[74](structural equation model,SEM)、溶质运移模型[28]、地理加权回归(geographically weighted regression,GWR)模型[24,66]、多布森模型(Dobson model)[75]和修正的残差克里金模型[76]等模型. ...
干旱区土壤盐渍化遥感估测模型研究——以宁夏平罗县为例
2
2017
... 以往的土壤盐渍化监测体系主要基于人工样点调查,费时费力,难以获取大面积宏观尺度的变化特性[9⇓-11].尤其在下垫面条件复杂、自然环境恶劣地区,监测站点布设不足,野外考察难度大,传统监测手段更难以满足需求[6,12].遥感卫星能够对特定区域进行不同尺度上可靠、持续的影像观测,过去10 a间,已经快速发展成为监测土壤盐渍化程度及分布的重要工具[13⇓-15].单时相的卫星影像可以客观地揭示某一时刻大范围区域内土壤质地空间差异,多时相的卫星影像则可以对同一区域不同时间变化规律进行比较分析[16-17].近年来,随着对地观测技术的发展,遥感数据的光谱信息逐渐丰富,时空分辨率不断提升,能够实现对地高精度、高重访(高时效)、多尺度、全天候观测,大大提高了遥感监测能力[18-19].利用多时相遥感影像,能够对不同地区土壤盐渍化参数进行定量反演,实现盐渍化土壤的动态监测和分析[17,20]. ...
... 在土壤样品采集过程中,使用便携式光谱测量仪可获得不同采样点的光谱曲线数据.经常被使用的野外便携式光谱测量仪包括美国SVC HR-768便携式野外光谱仪、美国Unispec-SC(波段为310~1 130 nm)便携式光谱仪[16]、美国ASD公司的ASD Fild Specpro FR光谱仪[31]、科罗拉多州博尔德制造的FieldSpecfiPro光谱测量仪[32]、FieldSpec-4高分辨率光谱辐射计[33]、CI700便携式野外光谱仪[34]和PSR-3500©便携式VisNIR光谱辐射计等设备. ...
干旱区土壤盐渍化遥感估测模型研究——以宁夏平罗县为例
2
2017
... 以往的土壤盐渍化监测体系主要基于人工样点调查,费时费力,难以获取大面积宏观尺度的变化特性[9⇓-11].尤其在下垫面条件复杂、自然环境恶劣地区,监测站点布设不足,野外考察难度大,传统监测手段更难以满足需求[6,12].遥感卫星能够对特定区域进行不同尺度上可靠、持续的影像观测,过去10 a间,已经快速发展成为监测土壤盐渍化程度及分布的重要工具[13⇓-15].单时相的卫星影像可以客观地揭示某一时刻大范围区域内土壤质地空间差异,多时相的卫星影像则可以对同一区域不同时间变化规律进行比较分析[16-17].近年来,随着对地观测技术的发展,遥感数据的光谱信息逐渐丰富,时空分辨率不断提升,能够实现对地高精度、高重访(高时效)、多尺度、全天候观测,大大提高了遥感监测能力[18-19].利用多时相遥感影像,能够对不同地区土壤盐渍化参数进行定量反演,实现盐渍化土壤的动态监测和分析[17,20]. ...
... 在土壤样品采集过程中,使用便携式光谱测量仪可获得不同采样点的光谱曲线数据.经常被使用的野外便携式光谱测量仪包括美国SVC HR-768便携式野外光谱仪、美国Unispec-SC(波段为310~1 130 nm)便携式光谱仪[16]、美国ASD公司的ASD Fild Specpro FR光谱仪[31]、科罗拉多州博尔德制造的FieldSpecfiPro光谱测量仪[32]、FieldSpec-4高分辨率光谱辐射计[33]、CI700便携式野外光谱仪[34]和PSR-3500©便携式VisNIR光谱辐射计等设备. ...
Estimating soil salinity in Pingluo County of China using QuickBird data and soil reflectance spectra
4
2014
... 以往的土壤盐渍化监测体系主要基于人工样点调查,费时费力,难以获取大面积宏观尺度的变化特性[9⇓-11].尤其在下垫面条件复杂、自然环境恶劣地区,监测站点布设不足,野外考察难度大,传统监测手段更难以满足需求[6,12].遥感卫星能够对特定区域进行不同尺度上可靠、持续的影像观测,过去10 a间,已经快速发展成为监测土壤盐渍化程度及分布的重要工具[13⇓-15].单时相的卫星影像可以客观地揭示某一时刻大范围区域内土壤质地空间差异,多时相的卫星影像则可以对同一区域不同时间变化规律进行比较分析[16-17].近年来,随着对地观测技术的发展,遥感数据的光谱信息逐渐丰富,时空分辨率不断提升,能够实现对地高精度、高重访(高时效)、多尺度、全天候观测,大大提高了遥感监测能力[18-19].利用多时相遥感影像,能够对不同地区土壤盐渍化参数进行定量反演,实现盐渍化土壤的动态监测和分析[17,20]. ...
... [17,20]. ...
... 2)多元线性回归模型(multiple linear regression model,MLR)是将多个变量进行最优组合来预测因变量,原理简单,应用广泛[2,8-9,17,22,24,40⇓-42,56,58-59],其公式为: ...
... 除上述模型外一些新型模型与改进模型也被用于遥感监测模型的构建,如逐步多元回归(stepwise multiple regression analysis,SMR)模型[17,35,64]、岭回归模型(ridge regression,RR)模型[65-66]、普通最小二乘法(ordinary least square,OLS)[67-68]、空间自回归(spatial autore gression,SAR)模型[56]、决策树算法(decision tree algorithm,DTA)[67]、支持向量回归(support vector regression,SVR)模型[12,25,69]、粒子群优化支持向量机(particle swarm optimization support vector machine,PSO-SVM)模型[15,70]、网格搜索支持向量机(grid search support vector machine, GS-SVM)[71]、差分进化支持向量机(differential evolution support vector machine,DE-SVM)模型 [15]、卷积神经网络(convolutional neural network,CNN)模型[70]、多元自适应回归样条(multivariate adaptive regression spline,MARS)模型[1,25,72]、人工神经网络(artificial neural network,ANN)模型[7,26]、Bootstrap-BP神经网络模型[43]、极限学习机(extra learning machine,ELM)[61,73]、结构方程模型[74](structural equation model,SEM)、溶质运移模型[28]、地理加权回归(geographically weighted regression,GWR)模型[24,66]、多布森模型(Dobson model)[75]和修正的残差克里金模型[76]等模型. ...
高分辨率对地观测的若干前沿科学问题
1
2012
... 以往的土壤盐渍化监测体系主要基于人工样点调查,费时费力,难以获取大面积宏观尺度的变化特性[9⇓-11].尤其在下垫面条件复杂、自然环境恶劣地区,监测站点布设不足,野外考察难度大,传统监测手段更难以满足需求[6,12].遥感卫星能够对特定区域进行不同尺度上可靠、持续的影像观测,过去10 a间,已经快速发展成为监测土壤盐渍化程度及分布的重要工具[13⇓-15].单时相的卫星影像可以客观地揭示某一时刻大范围区域内土壤质地空间差异,多时相的卫星影像则可以对同一区域不同时间变化规律进行比较分析[16-17].近年来,随着对地观测技术的发展,遥感数据的光谱信息逐渐丰富,时空分辨率不断提升,能够实现对地高精度、高重访(高时效)、多尺度、全天候观测,大大提高了遥感监测能力[18-19].利用多时相遥感影像,能够对不同地区土壤盐渍化参数进行定量反演,实现盐渍化土壤的动态监测和分析[17,20]. ...
高分辨率对地观测的若干前沿科学问题
1
2012
... 以往的土壤盐渍化监测体系主要基于人工样点调查,费时费力,难以获取大面积宏观尺度的变化特性[9⇓-11].尤其在下垫面条件复杂、自然环境恶劣地区,监测站点布设不足,野外考察难度大,传统监测手段更难以满足需求[6,12].遥感卫星能够对特定区域进行不同尺度上可靠、持续的影像观测,过去10 a间,已经快速发展成为监测土壤盐渍化程度及分布的重要工具[13⇓-15].单时相的卫星影像可以客观地揭示某一时刻大范围区域内土壤质地空间差异,多时相的卫星影像则可以对同一区域不同时间变化规律进行比较分析[16-17].近年来,随着对地观测技术的发展,遥感数据的光谱信息逐渐丰富,时空分辨率不断提升,能够实现对地高精度、高重访(高时效)、多尺度、全天候观测,大大提高了遥感监测能力[18-19].利用多时相遥感影像,能够对不同地区土壤盐渍化参数进行定量反演,实现盐渍化土壤的动态监测和分析[17,20]. ...
Assessing the degree of soil salinity in the Indian Sundarban Biosphere Reserve using measured soil electrical conductivity and remote sensing data-derived salinity indices
2
2020
... 以往的土壤盐渍化监测体系主要基于人工样点调查,费时费力,难以获取大面积宏观尺度的变化特性[9⇓-11].尤其在下垫面条件复杂、自然环境恶劣地区,监测站点布设不足,野外考察难度大,传统监测手段更难以满足需求[6,12].遥感卫星能够对特定区域进行不同尺度上可靠、持续的影像观测,过去10 a间,已经快速发展成为监测土壤盐渍化程度及分布的重要工具[13⇓-15].单时相的卫星影像可以客观地揭示某一时刻大范围区域内土壤质地空间差异,多时相的卫星影像则可以对同一区域不同时间变化规律进行比较分析[16-17].近年来,随着对地观测技术的发展,遥感数据的光谱信息逐渐丰富,时空分辨率不断提升,能够实现对地高精度、高重访(高时效)、多尺度、全天候观测,大大提高了遥感监测能力[18-19].利用多时相遥感影像,能够对不同地区土壤盐渍化参数进行定量反演,实现盐渍化土壤的动态监测和分析[17,20]. ...
... 1)一元线性回归分模型(linear regression model,LR)是原理最简单的建模方法[19],是根据自变量X和因变量Y的相关关系,建立X与Y的线性回归方程的方法,可以建立土壤盐分含量与某一单一建模因子之间的关系,通常可在SPSS软件中建模,一元线性回归分析法的模型为: ...
Evolution of soil salinization under the background of landscape patterns in the irrigated northern slopes of Tianshan Mountains,Xinjiang,China
2
2021
... 以往的土壤盐渍化监测体系主要基于人工样点调查,费时费力,难以获取大面积宏观尺度的变化特性[9⇓-11].尤其在下垫面条件复杂、自然环境恶劣地区,监测站点布设不足,野外考察难度大,传统监测手段更难以满足需求[6,12].遥感卫星能够对特定区域进行不同尺度上可靠、持续的影像观测,过去10 a间,已经快速发展成为监测土壤盐渍化程度及分布的重要工具[13⇓-15].单时相的卫星影像可以客观地揭示某一时刻大范围区域内土壤质地空间差异,多时相的卫星影像则可以对同一区域不同时间变化规律进行比较分析[16-17].近年来,随着对地观测技术的发展,遥感数据的光谱信息逐渐丰富,时空分辨率不断提升,能够实现对地高精度、高重访(高时效)、多尺度、全天候观测,大大提高了遥感监测能力[18-19].利用多时相遥感影像,能够对不同地区土壤盐渍化参数进行定量反演,实现盐渍化土壤的动态监测和分析[17,20]. ...
... 提取后的模型构建需要进一步优选,将提取到的各个波段的反射率值、指数计算结果等数值与实测土壤盐分含量进行相关性分析或回归分析,选取相关性较高、回归系数较大的因子作为敏感波段及敏感指数因子参与建模,并解决因子间的共线性问题 [20].在建模前需要将样本点进行分组,建模集与验证集比例通常接近3:1,便于模型建立后的精度验证. ...
Soil salinity mapping using machine learning algorithms with the Sentinel-2 MSI in arid areas,China
1
2021
... 利用遥感数据定量评价土壤盐渍化的核心是找出相关指标的含量与遥感数据之间的关系,因此,利用遥感技术研究土壤盐渍化的目的是建立一个可靠的估算模型[21-22].土壤盐渍化反演遥感模型的建立需要探求土壤实际含盐量、盐渍化程度以及盐渍土类型与遥感数据不同波段、波段组合及其他遥感参数之间的关系[23-24],因此需要获取土壤含盐量及实际理化性质的量化数值,利用统计学等方法建立与遥感数据的光谱信息数值之间线性或非线性模型[25-26],并对模型进行精度验证,精度较高的模型在很大程度上可用于该研究区内土壤盐渍化情况的监测[4,27].遥感监测模型构建方法在步骤上存在一定的差异,但总体流程是一致的,其目的是为了获取更高精度的反演模型,用以评估区域盐渍化状况[11]. ...
Modeling of soil salinity based on remote sensing processing and geochemical analysis in southern Tunisia
2
2013
... 利用遥感数据定量评价土壤盐渍化的核心是找出相关指标的含量与遥感数据之间的关系,因此,利用遥感技术研究土壤盐渍化的目的是建立一个可靠的估算模型[21-22].土壤盐渍化反演遥感模型的建立需要探求土壤实际含盐量、盐渍化程度以及盐渍土类型与遥感数据不同波段、波段组合及其他遥感参数之间的关系[23-24],因此需要获取土壤含盐量及实际理化性质的量化数值,利用统计学等方法建立与遥感数据的光谱信息数值之间线性或非线性模型[25-26],并对模型进行精度验证,精度较高的模型在很大程度上可用于该研究区内土壤盐渍化情况的监测[4,27].遥感监测模型构建方法在步骤上存在一定的差异,但总体流程是一致的,其目的是为了获取更高精度的反演模型,用以评估区域盐渍化状况[11]. ...
... 2)多元线性回归模型(multiple linear regression model,MLR)是将多个变量进行最优组合来预测因变量,原理简单,应用广泛[2,8-9,17,22,24,40⇓-42,56,58-59],其公式为: ...
Remote sensing inversion for simulation of soil salinization based on hyperspectral data and ground analysis in Yinchuan,China
1
2021
... 利用遥感数据定量评价土壤盐渍化的核心是找出相关指标的含量与遥感数据之间的关系,因此,利用遥感技术研究土壤盐渍化的目的是建立一个可靠的估算模型[21-22].土壤盐渍化反演遥感模型的建立需要探求土壤实际含盐量、盐渍化程度以及盐渍土类型与遥感数据不同波段、波段组合及其他遥感参数之间的关系[23-24],因此需要获取土壤含盐量及实际理化性质的量化数值,利用统计学等方法建立与遥感数据的光谱信息数值之间线性或非线性模型[25-26],并对模型进行精度验证,精度较高的模型在很大程度上可用于该研究区内土壤盐渍化情况的监测[4,27].遥感监测模型构建方法在步骤上存在一定的差异,但总体流程是一致的,其目的是为了获取更高精度的反演模型,用以评估区域盐渍化状况[11]. ...
Spatial prediction of soil salinity in a semiarid oasis:Environmental sensitive variable selection and model comparison
5
2019
... 利用遥感数据定量评价土壤盐渍化的核心是找出相关指标的含量与遥感数据之间的关系,因此,利用遥感技术研究土壤盐渍化的目的是建立一个可靠的估算模型[21-22].土壤盐渍化反演遥感模型的建立需要探求土壤实际含盐量、盐渍化程度以及盐渍土类型与遥感数据不同波段、波段组合及其他遥感参数之间的关系[23-24],因此需要获取土壤含盐量及实际理化性质的量化数值,利用统计学等方法建立与遥感数据的光谱信息数值之间线性或非线性模型[25-26],并对模型进行精度验证,精度较高的模型在很大程度上可用于该研究区内土壤盐渍化情况的监测[4,27].遥感监测模型构建方法在步骤上存在一定的差异,但总体流程是一致的,其目的是为了获取更高精度的反演模型,用以评估区域盐渍化状况[11]. ...
... 由于土壤盐渍化情况很大程度地受到气候因素、土壤理化性质、地形因素、空间位置和植被因素等环境变量的影响[24],因此可引入环境变量遥感产品数据参与建模.气候因素包括气温、降水等,土壤理化性质包括土壤质地、地表温度、地下水位、土壤湿度等,植物因素主要以一系列植被指数来表征[29],这些环境变量因子数据可以通过产品数据或由原始遥感影像通过指数计算获得,空间位置要根据样点坐标数据计算获得[24,56],地形因素包括数字高程模型(digital elevation model,DEM)数据及其衍生数据,地下水位数据可由测站观测井获得[57]. ...
... [24,56],地形因素包括数字高程模型(digital elevation model,DEM)数据及其衍生数据,地下水位数据可由测站观测井获得[57]. ...
... 2)多元线性回归模型(multiple linear regression model,MLR)是将多个变量进行最优组合来预测因变量,原理简单,应用广泛[2,8-9,17,22,24,40⇓-42,56,58-59],其公式为: ...
... 除上述模型外一些新型模型与改进模型也被用于遥感监测模型的构建,如逐步多元回归(stepwise multiple regression analysis,SMR)模型[17,35,64]、岭回归模型(ridge regression,RR)模型[65-66]、普通最小二乘法(ordinary least square,OLS)[67-68]、空间自回归(spatial autore gression,SAR)模型[56]、决策树算法(decision tree algorithm,DTA)[67]、支持向量回归(support vector regression,SVR)模型[12,25,69]、粒子群优化支持向量机(particle swarm optimization support vector machine,PSO-SVM)模型[15,70]、网格搜索支持向量机(grid search support vector machine, GS-SVM)[71]、差分进化支持向量机(differential evolution support vector machine,DE-SVM)模型 [15]、卷积神经网络(convolutional neural network,CNN)模型[70]、多元自适应回归样条(multivariate adaptive regression spline,MARS)模型[1,25,72]、人工神经网络(artificial neural network,ANN)模型[7,26]、Bootstrap-BP神经网络模型[43]、极限学习机(extra learning machine,ELM)[61,73]、结构方程模型[74](structural equation model,SEM)、溶质运移模型[28]、地理加权回归(geographically weighted regression,GWR)模型[24,66]、多布森模型(Dobson model)[75]和修正的残差克里金模型[76]等模型. ...
Monitoring properties of the salt-affected soils by multivariate analysis of the visible and near-infrared hyperspectral data
3
2020
... 利用遥感数据定量评价土壤盐渍化的核心是找出相关指标的含量与遥感数据之间的关系,因此,利用遥感技术研究土壤盐渍化的目的是建立一个可靠的估算模型[21-22].土壤盐渍化反演遥感模型的建立需要探求土壤实际含盐量、盐渍化程度以及盐渍土类型与遥感数据不同波段、波段组合及其他遥感参数之间的关系[23-24],因此需要获取土壤含盐量及实际理化性质的量化数值,利用统计学等方法建立与遥感数据的光谱信息数值之间线性或非线性模型[25-26],并对模型进行精度验证,精度较高的模型在很大程度上可用于该研究区内土壤盐渍化情况的监测[4,27].遥感监测模型构建方法在步骤上存在一定的差异,但总体流程是一致的,其目的是为了获取更高精度的反演模型,用以评估区域盐渍化状况[11]. ...
... 除上述模型外一些新型模型与改进模型也被用于遥感监测模型的构建,如逐步多元回归(stepwise multiple regression analysis,SMR)模型[17,35,64]、岭回归模型(ridge regression,RR)模型[65-66]、普通最小二乘法(ordinary least square,OLS)[67-68]、空间自回归(spatial autore gression,SAR)模型[56]、决策树算法(decision tree algorithm,DTA)[67]、支持向量回归(support vector regression,SVR)模型[12,25,69]、粒子群优化支持向量机(particle swarm optimization support vector machine,PSO-SVM)模型[15,70]、网格搜索支持向量机(grid search support vector machine, GS-SVM)[71]、差分进化支持向量机(differential evolution support vector machine,DE-SVM)模型 [15]、卷积神经网络(convolutional neural network,CNN)模型[70]、多元自适应回归样条(multivariate adaptive regression spline,MARS)模型[1,25,72]、人工神经网络(artificial neural network,ANN)模型[7,26]、Bootstrap-BP神经网络模型[43]、极限学习机(extra learning machine,ELM)[61,73]、结构方程模型[74](structural equation model,SEM)、溶质运移模型[28]、地理加权回归(geographically weighted regression,GWR)模型[24,66]、多布森模型(Dobson model)[75]和修正的残差克里金模型[76]等模型. ...
... ,25,72]、人工神经网络(artificial neural network,ANN)模型[7,26]、Bootstrap-BP神经网络模型[43]、极限学习机(extra learning machine,ELM)[61,73]、结构方程模型[74](structural equation model,SEM)、溶质运移模型[28]、地理加权回归(geographically weighted regression,GWR)模型[24,66]、多布森模型(Dobson model)[75]和修正的残差克里金模型[76]等模型. ...
Quantitative analysis of salt-affected soil reflectance spectra:A comparison of two adaptive methods (PLSR and ANN)
2
2007
... 利用遥感数据定量评价土壤盐渍化的核心是找出相关指标的含量与遥感数据之间的关系,因此,利用遥感技术研究土壤盐渍化的目的是建立一个可靠的估算模型[21-22].土壤盐渍化反演遥感模型的建立需要探求土壤实际含盐量、盐渍化程度以及盐渍土类型与遥感数据不同波段、波段组合及其他遥感参数之间的关系[23-24],因此需要获取土壤含盐量及实际理化性质的量化数值,利用统计学等方法建立与遥感数据的光谱信息数值之间线性或非线性模型[25-26],并对模型进行精度验证,精度较高的模型在很大程度上可用于该研究区内土壤盐渍化情况的监测[4,27].遥感监测模型构建方法在步骤上存在一定的差异,但总体流程是一致的,其目的是为了获取更高精度的反演模型,用以评估区域盐渍化状况[11]. ...
... 除上述模型外一些新型模型与改进模型也被用于遥感监测模型的构建,如逐步多元回归(stepwise multiple regression analysis,SMR)模型[17,35,64]、岭回归模型(ridge regression,RR)模型[65-66]、普通最小二乘法(ordinary least square,OLS)[67-68]、空间自回归(spatial autore gression,SAR)模型[56]、决策树算法(decision tree algorithm,DTA)[67]、支持向量回归(support vector regression,SVR)模型[12,25,69]、粒子群优化支持向量机(particle swarm optimization support vector machine,PSO-SVM)模型[15,70]、网格搜索支持向量机(grid search support vector machine, GS-SVM)[71]、差分进化支持向量机(differential evolution support vector machine,DE-SVM)模型 [15]、卷积神经网络(convolutional neural network,CNN)模型[70]、多元自适应回归样条(multivariate adaptive regression spline,MARS)模型[1,25,72]、人工神经网络(artificial neural network,ANN)模型[7,26]、Bootstrap-BP神经网络模型[43]、极限学习机(extra learning machine,ELM)[61,73]、结构方程模型[74](structural equation model,SEM)、溶质运移模型[28]、地理加权回归(geographically weighted regression,GWR)模型[24,66]、多布森模型(Dobson model)[75]和修正的残差克里金模型[76]等模型. ...
Estimation of soil salt and ion contents based on hyperspectral remote sensing data:A case study of Baidunzi Basin,China
1
2021
... 利用遥感数据定量评价土壤盐渍化的核心是找出相关指标的含量与遥感数据之间的关系,因此,利用遥感技术研究土壤盐渍化的目的是建立一个可靠的估算模型[21-22].土壤盐渍化反演遥感模型的建立需要探求土壤实际含盐量、盐渍化程度以及盐渍土类型与遥感数据不同波段、波段组合及其他遥感参数之间的关系[23-24],因此需要获取土壤含盐量及实际理化性质的量化数值,利用统计学等方法建立与遥感数据的光谱信息数值之间线性或非线性模型[25-26],并对模型进行精度验证,精度较高的模型在很大程度上可用于该研究区内土壤盐渍化情况的监测[4,27].遥感监测模型构建方法在步骤上存在一定的差异,但总体流程是一致的,其目的是为了获取更高精度的反演模型,用以评估区域盐渍化状况[11]. ...
Assessing salt-affected soils using remote sensing,solute modelling,and geophysics
2
2006
... 实测土壤含盐量是遥感监测模型建立的基础,是进行建模因子优选以及模型精度验证的依据,其一般获取方法是野外采集,在样本采集过程中使用全球定位系统(global positioning system,GPS)仪记录土壤坐标位置信息,将野外采集的土壤样本带回实验室进行测定实验.具体采样过程中,需要采集表层及地下不同深度的盐渍土,一般采用多点采样法,将采集到的样品封装后带回实验室,经过风干、研磨、过筛获得盐渍土细土样品,之后配置土壤溶液使用电导率仪测定土壤电导率、pH值及主要离子含量[7],或采用残渣烘干法获得土壤盐分含量及含水量[9],也可以使用电磁感应法和接触电极法测定土壤电导率,如土壤传感电磁感应GER3700和FieldSpec FR设备以及EM38来获取表征土壤盐分的数据[28-29],还有部分学者使用仪器85070E介电常数测量套件测定土壤介电常数来探讨其与土壤含盐量之间的关系[30]. ...
... 除上述模型外一些新型模型与改进模型也被用于遥感监测模型的构建,如逐步多元回归(stepwise multiple regression analysis,SMR)模型[17,35,64]、岭回归模型(ridge regression,RR)模型[65-66]、普通最小二乘法(ordinary least square,OLS)[67-68]、空间自回归(spatial autore gression,SAR)模型[56]、决策树算法(decision tree algorithm,DTA)[67]、支持向量回归(support vector regression,SVR)模型[12,25,69]、粒子群优化支持向量机(particle swarm optimization support vector machine,PSO-SVM)模型[15,70]、网格搜索支持向量机(grid search support vector machine, GS-SVM)[71]、差分进化支持向量机(differential evolution support vector machine,DE-SVM)模型 [15]、卷积神经网络(convolutional neural network,CNN)模型[70]、多元自适应回归样条(multivariate adaptive regression spline,MARS)模型[1,25,72]、人工神经网络(artificial neural network,ANN)模型[7,26]、Bootstrap-BP神经网络模型[43]、极限学习机(extra learning machine,ELM)[61,73]、结构方程模型[74](structural equation model,SEM)、溶质运移模型[28]、地理加权回归(geographically weighted regression,GWR)模型[24,66]、多布森模型(Dobson model)[75]和修正的残差克里金模型[76]等模型. ...
Using apparent electrical conductivity as indicator for investigating potential spatial variation of soil salinity across seven oases along Tarim River in southern Xinjiang,China
2
2020
... 实测土壤含盐量是遥感监测模型建立的基础,是进行建模因子优选以及模型精度验证的依据,其一般获取方法是野外采集,在样本采集过程中使用全球定位系统(global positioning system,GPS)仪记录土壤坐标位置信息,将野外采集的土壤样本带回实验室进行测定实验.具体采样过程中,需要采集表层及地下不同深度的盐渍土,一般采用多点采样法,将采集到的样品封装后带回实验室,经过风干、研磨、过筛获得盐渍土细土样品,之后配置土壤溶液使用电导率仪测定土壤电导率、pH值及主要离子含量[7],或采用残渣烘干法获得土壤盐分含量及含水量[9],也可以使用电磁感应法和接触电极法测定土壤电导率,如土壤传感电磁感应GER3700和FieldSpec FR设备以及EM38来获取表征土壤盐分的数据[28-29],还有部分学者使用仪器85070E介电常数测量套件测定土壤介电常数来探讨其与土壤含盐量之间的关系[30]. ...
... 由于土壤盐渍化情况很大程度地受到气候因素、土壤理化性质、地形因素、空间位置和植被因素等环境变量的影响[24],因此可引入环境变量遥感产品数据参与建模.气候因素包括气温、降水等,土壤理化性质包括土壤质地、地表温度、地下水位、土壤湿度等,植物因素主要以一系列植被指数来表征[29],这些环境变量因子数据可以通过产品数据或由原始遥感影像通过指数计算获得,空间位置要根据样点坐标数据计算获得[24,56],地形因素包括数字高程模型(digital elevation model,DEM)数据及其衍生数据,地下水位数据可由测站观测井获得[57]. ...
土壤水盐介电模型对比与分析
1
2017
... 实测土壤含盐量是遥感监测模型建立的基础,是进行建模因子优选以及模型精度验证的依据,其一般获取方法是野外采集,在样本采集过程中使用全球定位系统(global positioning system,GPS)仪记录土壤坐标位置信息,将野外采集的土壤样本带回实验室进行测定实验.具体采样过程中,需要采集表层及地下不同深度的盐渍土,一般采用多点采样法,将采集到的样品封装后带回实验室,经过风干、研磨、过筛获得盐渍土细土样品,之后配置土壤溶液使用电导率仪测定土壤电导率、pH值及主要离子含量[7],或采用残渣烘干法获得土壤盐分含量及含水量[9],也可以使用电磁感应法和接触电极法测定土壤电导率,如土壤传感电磁感应GER3700和FieldSpec FR设备以及EM38来获取表征土壤盐分的数据[28-29],还有部分学者使用仪器85070E介电常数测量套件测定土壤介电常数来探讨其与土壤含盐量之间的关系[30]. ...
土壤水盐介电模型对比与分析
1
2017
... 实测土壤含盐量是遥感监测模型建立的基础,是进行建模因子优选以及模型精度验证的依据,其一般获取方法是野外采集,在样本采集过程中使用全球定位系统(global positioning system,GPS)仪记录土壤坐标位置信息,将野外采集的土壤样本带回实验室进行测定实验.具体采样过程中,需要采集表层及地下不同深度的盐渍土,一般采用多点采样法,将采集到的样品封装后带回实验室,经过风干、研磨、过筛获得盐渍土细土样品,之后配置土壤溶液使用电导率仪测定土壤电导率、pH值及主要离子含量[7],或采用残渣烘干法获得土壤盐分含量及含水量[9],也可以使用电磁感应法和接触电极法测定土壤电导率,如土壤传感电磁感应GER3700和FieldSpec FR设备以及EM38来获取表征土壤盐分的数据[28-29],还有部分学者使用仪器85070E介电常数测量套件测定土壤介电常数来探讨其与土壤含盐量之间的关系[30]. ...
基于实测高光谱和电磁感应数据的区域土壤盐渍化遥感监测研究
2
2013
... 在土壤样品采集过程中,使用便携式光谱测量仪可获得不同采样点的光谱曲线数据.经常被使用的野外便携式光谱测量仪包括美国SVC HR-768便携式野外光谱仪、美国Unispec-SC(波段为310~1 130 nm)便携式光谱仪[16]、美国ASD公司的ASD Fild Specpro FR光谱仪[31]、科罗拉多州博尔德制造的FieldSpecfiPro光谱测量仪[32]、FieldSpec-4高分辨率光谱辐射计[33]、CI700便携式野外光谱仪[34]和PSR-3500©便携式VisNIR光谱辐射计等设备. ...
... 选择适当的数学方法改变高光谱反射率可以更好地突出光谱的反射和吸收特性,并有助于筛选敏感波段[36].将反射率、反射率一阶微分变换、反射率二阶微分变换、倒数变换、倒数一阶微分变换、对数变换、对数一阶微分变换、对数倒数变换、对数倒数一阶微分变换、均方根变换和均方根一阶微分变换等数学变换的结果可作为土壤的高光谱指数[37].分别将不同盐渍化程度的土壤盐分解译数据与去噪后得到的土壤光谱及其变换形式进行相关性分析[31],选取相关性较高的波段作为土壤含盐量的敏感波段,作为模型构建的因子,即 ...
基于实测高光谱和电磁感应数据的区域土壤盐渍化遥感监测研究
2
2013
... 在土壤样品采集过程中,使用便携式光谱测量仪可获得不同采样点的光谱曲线数据.经常被使用的野外便携式光谱测量仪包括美国SVC HR-768便携式野外光谱仪、美国Unispec-SC(波段为310~1 130 nm)便携式光谱仪[16]、美国ASD公司的ASD Fild Specpro FR光谱仪[31]、科罗拉多州博尔德制造的FieldSpecfiPro光谱测量仪[32]、FieldSpec-4高分辨率光谱辐射计[33]、CI700便携式野外光谱仪[34]和PSR-3500©便携式VisNIR光谱辐射计等设备. ...
... 选择适当的数学方法改变高光谱反射率可以更好地突出光谱的反射和吸收特性,并有助于筛选敏感波段[36].将反射率、反射率一阶微分变换、反射率二阶微分变换、倒数变换、倒数一阶微分变换、对数变换、对数一阶微分变换、对数倒数变换、对数倒数一阶微分变换、均方根变换和均方根一阶微分变换等数学变换的结果可作为土壤的高光谱指数[37].分别将不同盐渍化程度的土壤盐分解译数据与去噪后得到的土壤光谱及其变换形式进行相关性分析[31],选取相关性较高的波段作为土壤含盐量的敏感波段,作为模型构建的因子,即 ...
Application of remote-sensing data and decision-tree analysis to mapping salt-affected soils over large areas
1
2009
... 在土壤样品采集过程中,使用便携式光谱测量仪可获得不同采样点的光谱曲线数据.经常被使用的野外便携式光谱测量仪包括美国SVC HR-768便携式野外光谱仪、美国Unispec-SC(波段为310~1 130 nm)便携式光谱仪[16]、美国ASD公司的ASD Fild Specpro FR光谱仪[31]、科罗拉多州博尔德制造的FieldSpecfiPro光谱测量仪[32]、FieldSpec-4高分辨率光谱辐射计[33]、CI700便携式野外光谱仪[34]和PSR-3500©便携式VisNIR光谱辐射计等设备. ...
Validation and comparison of physical models for soil salinity mapping over an arid landscape using spectral reflectance measurements and Landsat-OLI data
1
2021
... 在土壤样品采集过程中,使用便携式光谱测量仪可获得不同采样点的光谱曲线数据.经常被使用的野外便携式光谱测量仪包括美国SVC HR-768便携式野外光谱仪、美国Unispec-SC(波段为310~1 130 nm)便携式光谱仪[16]、美国ASD公司的ASD Fild Specpro FR光谱仪[31]、科罗拉多州博尔德制造的FieldSpecfiPro光谱测量仪[32]、FieldSpec-4高分辨率光谱辐射计[33]、CI700便携式野外光谱仪[34]和PSR-3500©便携式VisNIR光谱辐射计等设备. ...
塔里木盆地北缘绿洲盐渍化地地物光谱特征分析
1
2008
... 在土壤样品采集过程中,使用便携式光谱测量仪可获得不同采样点的光谱曲线数据.经常被使用的野外便携式光谱测量仪包括美国SVC HR-768便携式野外光谱仪、美国Unispec-SC(波段为310~1 130 nm)便携式光谱仪[16]、美国ASD公司的ASD Fild Specpro FR光谱仪[31]、科罗拉多州博尔德制造的FieldSpecfiPro光谱测量仪[32]、FieldSpec-4高分辨率光谱辐射计[33]、CI700便携式野外光谱仪[34]和PSR-3500©便携式VisNIR光谱辐射计等设备. ...
塔里木盆地北缘绿洲盐渍化地地物光谱特征分析
1
2008
... 在土壤样品采集过程中,使用便携式光谱测量仪可获得不同采样点的光谱曲线数据.经常被使用的野外便携式光谱测量仪包括美国SVC HR-768便携式野外光谱仪、美国Unispec-SC(波段为310~1 130 nm)便携式光谱仪[16]、美国ASD公司的ASD Fild Specpro FR光谱仪[31]、科罗拉多州博尔德制造的FieldSpecfiPro光谱测量仪[32]、FieldSpec-4高分辨率光谱辐射计[33]、CI700便携式野外光谱仪[34]和PSR-3500©便携式VisNIR光谱辐射计等设备. ...
基于Sentinel-2A遥感数据对吉林白城市土壤含盐量的反演
2
2020
... 根据野外实际情况以及数据使用的特定需求制定一系列的测定操作规范,获取光谱曲线数据后需要利用光谱仪的后处理软件进行取均值、归一化等处理,通常采用最小二乘拟合的多项式低通平滑Savitzky-Golay 滤波方法对光谱曲线进行平滑处理,以增强光谱的有效性和准确性,最大程度消除噪声.为更好地分析光谱数据与土壤含盐量之间的相关关系,对土壤光谱反射率分别进行倒数、对数、对数倒数和均方根等数学变换,然后再进行一阶、二阶微分变换以消除基线漂移或平滑背景的干扰[35].一阶、二阶微分方程分别为: ...
... 除上述模型外一些新型模型与改进模型也被用于遥感监测模型的构建,如逐步多元回归(stepwise multiple regression analysis,SMR)模型[17,35,64]、岭回归模型(ridge regression,RR)模型[65-66]、普通最小二乘法(ordinary least square,OLS)[67-68]、空间自回归(spatial autore gression,SAR)模型[56]、决策树算法(decision tree algorithm,DTA)[67]、支持向量回归(support vector regression,SVR)模型[12,25,69]、粒子群优化支持向量机(particle swarm optimization support vector machine,PSO-SVM)模型[15,70]、网格搜索支持向量机(grid search support vector machine, GS-SVM)[71]、差分进化支持向量机(differential evolution support vector machine,DE-SVM)模型 [15]、卷积神经网络(convolutional neural network,CNN)模型[70]、多元自适应回归样条(multivariate adaptive regression spline,MARS)模型[1,25,72]、人工神经网络(artificial neural network,ANN)模型[7,26]、Bootstrap-BP神经网络模型[43]、极限学习机(extra learning machine,ELM)[61,73]、结构方程模型[74](structural equation model,SEM)、溶质运移模型[28]、地理加权回归(geographically weighted regression,GWR)模型[24,66]、多布森模型(Dobson model)[75]和修正的残差克里金模型[76]等模型. ...
基于Sentinel-2A遥感数据对吉林白城市土壤含盐量的反演
2
2020
... 根据野外实际情况以及数据使用的特定需求制定一系列的测定操作规范,获取光谱曲线数据后需要利用光谱仪的后处理软件进行取均值、归一化等处理,通常采用最小二乘拟合的多项式低通平滑Savitzky-Golay 滤波方法对光谱曲线进行平滑处理,以增强光谱的有效性和准确性,最大程度消除噪声.为更好地分析光谱数据与土壤含盐量之间的相关关系,对土壤光谱反射率分别进行倒数、对数、对数倒数和均方根等数学变换,然后再进行一阶、二阶微分变换以消除基线漂移或平滑背景的干扰[35].一阶、二阶微分方程分别为: ...
... 除上述模型外一些新型模型与改进模型也被用于遥感监测模型的构建,如逐步多元回归(stepwise multiple regression analysis,SMR)模型[17,35,64]、岭回归模型(ridge regression,RR)模型[65-66]、普通最小二乘法(ordinary least square,OLS)[67-68]、空间自回归(spatial autore gression,SAR)模型[56]、决策树算法(decision tree algorithm,DTA)[67]、支持向量回归(support vector regression,SVR)模型[12,25,69]、粒子群优化支持向量机(particle swarm optimization support vector machine,PSO-SVM)模型[15,70]、网格搜索支持向量机(grid search support vector machine, GS-SVM)[71]、差分进化支持向量机(differential evolution support vector machine,DE-SVM)模型 [15]、卷积神经网络(convolutional neural network,CNN)模型[70]、多元自适应回归样条(multivariate adaptive regression spline,MARS)模型[1,25,72]、人工神经网络(artificial neural network,ANN)模型[7,26]、Bootstrap-BP神经网络模型[43]、极限学习机(extra learning machine,ELM)[61,73]、结构方程模型[74](structural equation model,SEM)、溶质运移模型[28]、地理加权回归(geographically weighted regression,GWR)模型[24,66]、多布森模型(Dobson model)[75]和修正的残差克里金模型[76]等模型. ...
Improved remote sensing detection of soil salinity from a semi-arid climate in Northeast Brazil
1
2011
... 选择适当的数学方法改变高光谱反射率可以更好地突出光谱的反射和吸收特性,并有助于筛选敏感波段[36].将反射率、反射率一阶微分变换、反射率二阶微分变换、倒数变换、倒数一阶微分变换、对数变换、对数一阶微分变换、对数倒数变换、对数倒数一阶微分变换、均方根变换和均方根一阶微分变换等数学变换的结果可作为土壤的高光谱指数[37].分别将不同盐渍化程度的土壤盐分解译数据与去噪后得到的土壤光谱及其变换形式进行相关性分析[31],选取相关性较高的波段作为土壤含盐量的敏感波段,作为模型构建的因子,即 ...
盐渍化土壤光谱特征分析与建模
1
2015
... 选择适当的数学方法改变高光谱反射率可以更好地突出光谱的反射和吸收特性,并有助于筛选敏感波段[36].将反射率、反射率一阶微分变换、反射率二阶微分变换、倒数变换、倒数一阶微分变换、对数变换、对数一阶微分变换、对数倒数变换、对数倒数一阶微分变换、均方根变换和均方根一阶微分变换等数学变换的结果可作为土壤的高光谱指数[37].分别将不同盐渍化程度的土壤盐分解译数据与去噪后得到的土壤光谱及其变换形式进行相关性分析[31],选取相关性较高的波段作为土壤含盐量的敏感波段,作为模型构建的因子,即 ...
盐渍化土壤光谱特征分析与建模
1
2015
... 选择适当的数学方法改变高光谱反射率可以更好地突出光谱的反射和吸收特性,并有助于筛选敏感波段[36].将反射率、反射率一阶微分变换、反射率二阶微分变换、倒数变换、倒数一阶微分变换、对数变换、对数一阶微分变换、对数倒数变换、对数倒数一阶微分变换、均方根变换和均方根一阶微分变换等数学变换的结果可作为土壤的高光谱指数[37].分别将不同盐渍化程度的土壤盐分解译数据与去噪后得到的土壤光谱及其变换形式进行相关性分析[31],选取相关性较高的波段作为土壤含盐量的敏感波段,作为模型构建的因子,即 ...
土壤盐渍化雷达反演模拟研究
1
2015
... 光学遥感虽然应用广泛、解译方法比较成熟,但受天气与时间的限制比较大.而对于雷达遥感来说,因其具有全天候、全天时、穿透性等特点,可以很好解决以上限制,继而成为获取盐渍化程度及分布信息的有效技术手段[38].常用的雷达影像数据有全极化 PolSAR 数据、RADARSAT-2数据、探地雷达数据、Sentinel 1和PALSAR 全极化数据等. ...
土壤盐渍化雷达反演模拟研究
1
2015
... 光学遥感虽然应用广泛、解译方法比较成熟,但受天气与时间的限制比较大.而对于雷达遥感来说,因其具有全天候、全天时、穿透性等特点,可以很好解决以上限制,继而成为获取盐渍化程度及分布信息的有效技术手段[38].常用的雷达影像数据有全极化 PolSAR 数据、RADARSAT-2数据、探地雷达数据、Sentinel 1和PALSAR 全极化数据等. ...
UAV based soil salinity assessment of cropland
1
2019
... 近年来,随着遥感技术的不断发展以及无人机技术的日趋成熟,将无人机与遥感传感器结合,形成的无人机遥感监测手段在土壤盐渍化监测领域正在得到越来越广泛的应用.由于无人机遥感相对于近地遥感而言,具有大区域监测的优势,同时相比卫星遥感,影像的分辨率又有所提升,因此是广域范围内低成本监测土壤盐渍化的一种有效手段,在精准遥感监测领域具有较大的应用潜力[39].目前用于土壤盐渍化遥感监测研究的无人机传感器主要为美国Tetracam公司生产的Micro-MCA多光谱相机[40]以及多光谱相机(ParrotS)[14]等. ...
基于无人机多光谱遥感的土壤含盐量反演模型研究
2
2019
... 近年来,随着遥感技术的不断发展以及无人机技术的日趋成熟,将无人机与遥感传感器结合,形成的无人机遥感监测手段在土壤盐渍化监测领域正在得到越来越广泛的应用.由于无人机遥感相对于近地遥感而言,具有大区域监测的优势,同时相比卫星遥感,影像的分辨率又有所提升,因此是广域范围内低成本监测土壤盐渍化的一种有效手段,在精准遥感监测领域具有较大的应用潜力[39].目前用于土壤盐渍化遥感监测研究的无人机传感器主要为美国Tetracam公司生产的Micro-MCA多光谱相机[40]以及多光谱相机(ParrotS)[14]等. ...
... 2)多元线性回归模型(multiple linear regression model,MLR)是将多个变量进行最优组合来预测因变量,原理简单,应用广泛[2,8-9,17,22,24,40⇓-42,56,58-59],其公式为: ...
基于无人机多光谱遥感的土壤含盐量反演模型研究
2
2019
... 近年来,随着遥感技术的不断发展以及无人机技术的日趋成熟,将无人机与遥感传感器结合,形成的无人机遥感监测手段在土壤盐渍化监测领域正在得到越来越广泛的应用.由于无人机遥感相对于近地遥感而言,具有大区域监测的优势,同时相比卫星遥感,影像的分辨率又有所提升,因此是广域范围内低成本监测土壤盐渍化的一种有效手段,在精准遥感监测领域具有较大的应用潜力[39].目前用于土壤盐渍化遥感监测研究的无人机传感器主要为美国Tetracam公司生产的Micro-MCA多光谱相机[40]以及多光谱相机(ParrotS)[14]等. ...
... 2)多元线性回归模型(multiple linear regression model,MLR)是将多个变量进行最优组合来预测因变量,原理简单,应用广泛[2,8-9,17,22,24,40⇓-42,56,58-59],其公式为: ...
艾比湖湿地自然保护区土壤盐分多光谱遥感反演模型
2
2019
... 预处理后的遥感影像具有丰富的地物光谱信息,这些信息包含在影像不同波段的反射率值中,为建立实测土壤盐分数据与遥感影像光谱信息之间的联系,需要获取采样点空间位置下的遥感影像光谱信息,通常的做法是将采样点的GPS坐标信息导入到遥感影像中,提取这些位置像元点各波段的光谱反射率R,可对其进行倒数1/R、对数lnR、指数eR 、幂函数Ra、S曲线函数、一阶微分R'、二阶微分R″和分数阶微分R0.x等数学变换[41-42]. ...
... 2)多元线性回归模型(multiple linear regression model,MLR)是将多个变量进行最优组合来预测因变量,原理简单,应用广泛[2,8-9,17,22,24,40⇓-42,56,58-59],其公式为: ...
艾比湖湿地自然保护区土壤盐分多光谱遥感反演模型
2
2019
... 预处理后的遥感影像具有丰富的地物光谱信息,这些信息包含在影像不同波段的反射率值中,为建立实测土壤盐分数据与遥感影像光谱信息之间的联系,需要获取采样点空间位置下的遥感影像光谱信息,通常的做法是将采样点的GPS坐标信息导入到遥感影像中,提取这些位置像元点各波段的光谱反射率R,可对其进行倒数1/R、对数lnR、指数eR 、幂函数Ra、S曲线函数、一阶微分R'、二阶微分R″和分数阶微分R0.x等数学变换[41-42]. ...
... 2)多元线性回归模型(multiple linear regression model,MLR)是将多个变量进行最优组合来预测因变量,原理简单,应用广泛[2,8-9,17,22,24,40⇓-42,56,58-59],其公式为: ...
Remote sensing inversion for simulation of soil salinization based on hyperspectral data and ground analysis in Yinchuan,China
2
2021
... 预处理后的遥感影像具有丰富的地物光谱信息,这些信息包含在影像不同波段的反射率值中,为建立实测土壤盐分数据与遥感影像光谱信息之间的联系,需要获取采样点空间位置下的遥感影像光谱信息,通常的做法是将采样点的GPS坐标信息导入到遥感影像中,提取这些位置像元点各波段的光谱反射率R,可对其进行倒数1/R、对数lnR、指数eR 、幂函数Ra、S曲线函数、一阶微分R'、二阶微分R″和分数阶微分R0.x等数学变换[41-42]. ...
... 2)多元线性回归模型(multiple linear regression model,MLR)是将多个变量进行最优组合来预测因变量,原理简单,应用广泛[2,8-9,17,22,24,40⇓-42,56,58-59],其公式为: ...
Estimation of soil salt content (SSC) in the Ebinur Lake Wetland National Nature Reserve (ELWNNR),Northwest China,based on a Bootstrap-BP neural network model and optimal spectral indices
2
2018
... 单个波段所包含的光谱信息是有限的,因此在提取遥感影像的波段光谱反射率后可进行不同波段之间的组合运算,这些指数通常是已有研究得出的先验计算公式(表1),也可以使用不同的数学运算组合计算得到,包括差异指数(differentation index,DI)、比率指数(ratio index,RI)、归一化差异指数(normalized difference index,NDI)和土壤指数(soil index,SI)的二维波段组合光谱指数,也包括部分三维波段组合指数(three dimensional band combination index,TBI),通过这些组合可构建功能强大的光谱组合搜索模型[7,43].计算公式分别为: ...
... 除上述模型外一些新型模型与改进模型也被用于遥感监测模型的构建,如逐步多元回归(stepwise multiple regression analysis,SMR)模型[17,35,64]、岭回归模型(ridge regression,RR)模型[65-66]、普通最小二乘法(ordinary least square,OLS)[67-68]、空间自回归(spatial autore gression,SAR)模型[56]、决策树算法(decision tree algorithm,DTA)[67]、支持向量回归(support vector regression,SVR)模型[12,25,69]、粒子群优化支持向量机(particle swarm optimization support vector machine,PSO-SVM)模型[15,70]、网格搜索支持向量机(grid search support vector machine, GS-SVM)[71]、差分进化支持向量机(differential evolution support vector machine,DE-SVM)模型 [15]、卷积神经网络(convolutional neural network,CNN)模型[70]、多元自适应回归样条(multivariate adaptive regression spline,MARS)模型[1,25,72]、人工神经网络(artificial neural network,ANN)模型[7,26]、Bootstrap-BP神经网络模型[43]、极限学习机(extra learning machine,ELM)[61,73]、结构方程模型[74](structural equation model,SEM)、溶质运移模型[28]、地理加权回归(geographically weighted regression,GWR)模型[24,66]、多布森模型(Dobson model)[75]和修正的残差克里金模型[76]等模型. ...
Spatial modeling of soil alkalinity in GIS environment using IRS data
1
1997
... Modeling exponential formula
Tab.1 | 指数类型 | 指数 | 指数公式① | 参考文献 |
| 盐分指数 | 盐分指数(salinity index,SI-T) | | [44] |
| 盐分指数(normalized difference salinity index,NDSI) | | [45] |
| 盐分指数(salinity index1,SI1) | | [45] |
| 盐分指数(salinity index1,SI2) | | [45] |
| 盐分指数(salinity index1,SI3) | | [45] |
| 盐分指数(salinity index,S1) | | [46] |
| 盐分指数(salinity index,S2) | | [46] |
| 盐分指数(salinity index,S3) | | [46] |
| 盐分指数(salinity index,S5) | | [46] |
| 盐分指数(salinity index,S6) | | [46] |
| 盐分比指数(salinity ratio index,SAIO) | | [47] |
| 黏土指数(clay index,CLEX) | | [47] |
| 石膏指数(gypsum index,GYEX) | | [47] |
| 亮度指数(brightness index,BRI) | | [47] |
| 碳酸盐岩指数(carbonate index,CAEX) | | [47] |
| 植被指数 | 简单比值指数(simple ratio vegetation index,SR) | | [48] |
| 冠层响应盐指数(canopy response salinity index,CRSI) | | [49] |
| 归一化植被指数(normalized difference infrared index,NDVI) | | [45] |
| 增强植被指数(enhanced vegetation index,EVI) | | [50] |
| 差值植被指数(difference vegetation index,DVI) | | [51] |
| 修改土壤调节植被指数(modified soil adjusted vegetation index,MSAVI) | | [52] |
| 大气阻抗植被指数(atmospherically resistant vegetation index,ARVI) | | [52] |
| 广义植被归一化指数(generalized difference vegetation index,GDVI) | | [53] |
| 双波段增强植被指数(two-band enhanced vegetation index,EVI2) | | [54] |
| 扩展植被归一化指数(extended NDVI,ENDVI) | | [55] |
| 扩展植被增强指数(extented enhanced vegetation index, EEVI) | | [55] |
①式中: B表示蓝光波段; G表示绿光波段; R表示红光波段; NIR表示近红外波段; SWIR1和SWIR2分别表示短波红外波段1和2. ...
Assessment of hydrosaline land degradation by using a simple approach of remote sensing indicators
5
2005
... Modeling exponential formula
Tab.1 | 指数类型 | 指数 | 指数公式① | 参考文献 |
| 盐分指数 | 盐分指数(salinity index,SI-T) | | [44] |
| 盐分指数(normalized difference salinity index,NDSI) | | [45] |
| 盐分指数(salinity index1,SI1) | | [45] |
| 盐分指数(salinity index1,SI2) | | [45] |
| 盐分指数(salinity index1,SI3) | | [45] |
| 盐分指数(salinity index,S1) | | [46] |
| 盐分指数(salinity index,S2) | | [46] |
| 盐分指数(salinity index,S3) | | [46] |
| 盐分指数(salinity index,S5) | | [46] |
| 盐分指数(salinity index,S6) | | [46] |
| 盐分比指数(salinity ratio index,SAIO) | | [47] |
| 黏土指数(clay index,CLEX) | | [47] |
| 石膏指数(gypsum index,GYEX) | | [47] |
| 亮度指数(brightness index,BRI) | | [47] |
| 碳酸盐岩指数(carbonate index,CAEX) | | [47] |
| 植被指数 | 简单比值指数(simple ratio vegetation index,SR) | | [48] |
| 冠层响应盐指数(canopy response salinity index,CRSI) | | [49] |
| 归一化植被指数(normalized difference infrared index,NDVI) | | [45] |
| 增强植被指数(enhanced vegetation index,EVI) | | [50] |
| 差值植被指数(difference vegetation index,DVI) | | [51] |
| 修改土壤调节植被指数(modified soil adjusted vegetation index,MSAVI) | | [52] |
| 大气阻抗植被指数(atmospherically resistant vegetation index,ARVI) | | [52] |
| 广义植被归一化指数(generalized difference vegetation index,GDVI) | | [53] |
| 双波段增强植被指数(two-band enhanced vegetation index,EVI2) | | [54] |
| 扩展植被归一化指数(extended NDVI,ENDVI) | | [55] |
| 扩展植被增强指数(extented enhanced vegetation index, EEVI) | | [55] |
①式中: B表示蓝光波段; G表示绿光波段; R表示红光波段; NIR表示近红外波段; SWIR1和SWIR2分别表示短波红外波段1和2. ...
... [
45]
| 盐分指数(salinity index1,SI2) | | [45] |
| 盐分指数(salinity index1,SI3) | | [45] |
| 盐分指数(salinity index,S1) | | [46] |
| 盐分指数(salinity index,S2) | | [46] |
| 盐分指数(salinity index,S3) | | [46] |
| 盐分指数(salinity index,S5) | | [46] |
| 盐分指数(salinity index,S6) | | [46] |
| 盐分比指数(salinity ratio index,SAIO) | | [47] |
| 黏土指数(clay index,CLEX) | | [47] |
| 石膏指数(gypsum index,GYEX) | | [47] |
| 亮度指数(brightness index,BRI) | | [47] |
| 碳酸盐岩指数(carbonate index,CAEX) | | [47] |
| 植被指数 | 简单比值指数(simple ratio vegetation index,SR) | | [48] |
| 冠层响应盐指数(canopy response salinity index,CRSI) | | [49] |
| 归一化植被指数(normalized difference infrared index,NDVI) | | [45] |
| 增强植被指数(enhanced vegetation index,EVI) | | [50] |
| 差值植被指数(difference vegetation index,DVI) | | [51] |
| 修改土壤调节植被指数(modified soil adjusted vegetation index,MSAVI) | | [52] |
| 大气阻抗植被指数(atmospherically resistant vegetation index,ARVI) | | [52] |
| 广义植被归一化指数(generalized difference vegetation index,GDVI) | | [53] |
| 双波段增强植被指数(two-band enhanced vegetation index,EVI2) | | [54] |
| 扩展植被归一化指数(extended NDVI,ENDVI) | | [55] |
| 扩展植被增强指数(extented enhanced vegetation index, EEVI) | | [55] |
①式中: B表示蓝光波段; G表示绿光波段; R表示红光波段; NIR表示近红外波段; SWIR1和SWIR2分别表示短波红外波段1和2. ...
... [
45]
| 盐分指数(salinity index1,SI3) | | [45] |
| 盐分指数(salinity index,S1) | | [46] |
| 盐分指数(salinity index,S2) | | [46] |
| 盐分指数(salinity index,S3) | | [46] |
| 盐分指数(salinity index,S5) | | [46] |
| 盐分指数(salinity index,S6) | | [46] |
| 盐分比指数(salinity ratio index,SAIO) | | [47] |
| 黏土指数(clay index,CLEX) | | [47] |
| 石膏指数(gypsum index,GYEX) | | [47] |
| 亮度指数(brightness index,BRI) | | [47] |
| 碳酸盐岩指数(carbonate index,CAEX) | | [47] |
| 植被指数 | 简单比值指数(simple ratio vegetation index,SR) | | [48] |
| 冠层响应盐指数(canopy response salinity index,CRSI) | | [49] |
| 归一化植被指数(normalized difference infrared index,NDVI) | | [45] |
| 增强植被指数(enhanced vegetation index,EVI) | | [50] |
| 差值植被指数(difference vegetation index,DVI) | | [51] |
| 修改土壤调节植被指数(modified soil adjusted vegetation index,MSAVI) | | [52] |
| 大气阻抗植被指数(atmospherically resistant vegetation index,ARVI) | | [52] |
| 广义植被归一化指数(generalized difference vegetation index,GDVI) | | [53] |
| 双波段增强植被指数(two-band enhanced vegetation index,EVI2) | | [54] |
| 扩展植被归一化指数(extended NDVI,ENDVI) | | [55] |
| 扩展植被增强指数(extented enhanced vegetation index, EEVI) | | [55] |
①式中: B表示蓝光波段; G表示绿光波段; R表示红光波段; NIR表示近红外波段; SWIR1和SWIR2分别表示短波红外波段1和2. ...
... [
45]
| 盐分指数(salinity index,S1) | | [46] |
| 盐分指数(salinity index,S2) | | [46] |
| 盐分指数(salinity index,S3) | | [46] |
| 盐分指数(salinity index,S5) | | [46] |
| 盐分指数(salinity index,S6) | | [46] |
| 盐分比指数(salinity ratio index,SAIO) | | [47] |
| 黏土指数(clay index,CLEX) | | [47] |
| 石膏指数(gypsum index,GYEX) | | [47] |
| 亮度指数(brightness index,BRI) | | [47] |
| 碳酸盐岩指数(carbonate index,CAEX) | | [47] |
| 植被指数 | 简单比值指数(simple ratio vegetation index,SR) | | [48] |
| 冠层响应盐指数(canopy response salinity index,CRSI) | | [49] |
| 归一化植被指数(normalized difference infrared index,NDVI) | | [45] |
| 增强植被指数(enhanced vegetation index,EVI) | | [50] |
| 差值植被指数(difference vegetation index,DVI) | | [51] |
| 修改土壤调节植被指数(modified soil adjusted vegetation index,MSAVI) | | [52] |
| 大气阻抗植被指数(atmospherically resistant vegetation index,ARVI) | | [52] |
| 广义植被归一化指数(generalized difference vegetation index,GDVI) | | [53] |
| 双波段增强植被指数(two-band enhanced vegetation index,EVI2) | | [54] |
| 扩展植被归一化指数(extended NDVI,ENDVI) | | [55] |
| 扩展植被增强指数(extented enhanced vegetation index, EEVI) | | [55] |
①式中: B表示蓝光波段; G表示绿光波段; R表示红光波段; NIR表示近红外波段; SWIR1和SWIR2分别表示短波红外波段1和2. ...
... [
45]
| 增强植被指数(enhanced vegetation index,EVI) | | [50] |
| 差值植被指数(difference vegetation index,DVI) | | [51] |
| 修改土壤调节植被指数(modified soil adjusted vegetation index,MSAVI) | | [52] |
| 大气阻抗植被指数(atmospherically resistant vegetation index,ARVI) | | [52] |
| 广义植被归一化指数(generalized difference vegetation index,GDVI) | | [53] |
| 双波段增强植被指数(two-band enhanced vegetation index,EVI2) | | [54] |
| 扩展植被归一化指数(extended NDVI,ENDVI) | | [55] |
| 扩展植被增强指数(extented enhanced vegetation index, EEVI) | | [55] |
①式中: B表示蓝光波段; G表示绿光波段; R表示红光波段; NIR表示近红外波段; SWIR1和SWIR2分别表示短波红外波段1和2. ...
Assessing soil salinity using soil salinity and vegetation indices derived from IKONOS high spatial resolution imageries:Applications in a date palm dominated region
5
2014
... Modeling exponential formula
Tab.1 | 指数类型 | 指数 | 指数公式① | 参考文献 |
| 盐分指数 | 盐分指数(salinity index,SI-T) | | [44] |
| 盐分指数(normalized difference salinity index,NDSI) | | [45] |
| 盐分指数(salinity index1,SI1) | | [45] |
| 盐分指数(salinity index1,SI2) | | [45] |
| 盐分指数(salinity index1,SI3) | | [45] |
| 盐分指数(salinity index,S1) | | [46] |
| 盐分指数(salinity index,S2) | | [46] |
| 盐分指数(salinity index,S3) | | [46] |
| 盐分指数(salinity index,S5) | | [46] |
| 盐分指数(salinity index,S6) | | [46] |
| 盐分比指数(salinity ratio index,SAIO) | | [47] |
| 黏土指数(clay index,CLEX) | | [47] |
| 石膏指数(gypsum index,GYEX) | | [47] |
| 亮度指数(brightness index,BRI) | | [47] |
| 碳酸盐岩指数(carbonate index,CAEX) | | [47] |
| 植被指数 | 简单比值指数(simple ratio vegetation index,SR) | | [48] |
| 冠层响应盐指数(canopy response salinity index,CRSI) | | [49] |
| 归一化植被指数(normalized difference infrared index,NDVI) | | [45] |
| 增强植被指数(enhanced vegetation index,EVI) | | [50] |
| 差值植被指数(difference vegetation index,DVI) | | [51] |
| 修改土壤调节植被指数(modified soil adjusted vegetation index,MSAVI) | | [52] |
| 大气阻抗植被指数(atmospherically resistant vegetation index,ARVI) | | [52] |
| 广义植被归一化指数(generalized difference vegetation index,GDVI) | | [53] |
| 双波段增强植被指数(two-band enhanced vegetation index,EVI2) | | [54] |
| 扩展植被归一化指数(extended NDVI,ENDVI) | | [55] |
| 扩展植被增强指数(extented enhanced vegetation index, EEVI) | | [55] |
①式中: B表示蓝光波段; G表示绿光波段; R表示红光波段; NIR表示近红外波段; SWIR1和SWIR2分别表示短波红外波段1和2. ...
... [
46]
| 盐分指数(salinity index,S3) | | [46] |
| 盐分指数(salinity index,S5) | | [46] |
| 盐分指数(salinity index,S6) | | [46] |
| 盐分比指数(salinity ratio index,SAIO) | | [47] |
| 黏土指数(clay index,CLEX) | | [47] |
| 石膏指数(gypsum index,GYEX) | | [47] |
| 亮度指数(brightness index,BRI) | | [47] |
| 碳酸盐岩指数(carbonate index,CAEX) | | [47] |
| 植被指数 | 简单比值指数(simple ratio vegetation index,SR) | | [48] |
| 冠层响应盐指数(canopy response salinity index,CRSI) | | [49] |
| 归一化植被指数(normalized difference infrared index,NDVI) | | [45] |
| 增强植被指数(enhanced vegetation index,EVI) | | [50] |
| 差值植被指数(difference vegetation index,DVI) | | [51] |
| 修改土壤调节植被指数(modified soil adjusted vegetation index,MSAVI) | | [52] |
| 大气阻抗植被指数(atmospherically resistant vegetation index,ARVI) | | [52] |
| 广义植被归一化指数(generalized difference vegetation index,GDVI) | | [53] |
| 双波段增强植被指数(two-band enhanced vegetation index,EVI2) | | [54] |
| 扩展植被归一化指数(extended NDVI,ENDVI) | | [55] |
| 扩展植被增强指数(extented enhanced vegetation index, EEVI) | | [55] |
①式中: B表示蓝光波段; G表示绿光波段; R表示红光波段; NIR表示近红外波段; SWIR1和SWIR2分别表示短波红外波段1和2. ...
... [
46]
| 盐分指数(salinity index,S5) | | [46] |
| 盐分指数(salinity index,S6) | | [46] |
| 盐分比指数(salinity ratio index,SAIO) | | [47] |
| 黏土指数(clay index,CLEX) | | [47] |
| 石膏指数(gypsum index,GYEX) | | [47] |
| 亮度指数(brightness index,BRI) | | [47] |
| 碳酸盐岩指数(carbonate index,CAEX) | | [47] |
| 植被指数 | 简单比值指数(simple ratio vegetation index,SR) | | [48] |
| 冠层响应盐指数(canopy response salinity index,CRSI) | | [49] |
| 归一化植被指数(normalized difference infrared index,NDVI) | | [45] |
| 增强植被指数(enhanced vegetation index,EVI) | | [50] |
| 差值植被指数(difference vegetation index,DVI) | | [51] |
| 修改土壤调节植被指数(modified soil adjusted vegetation index,MSAVI) | | [52] |
| 大气阻抗植被指数(atmospherically resistant vegetation index,ARVI) | | [52] |
| 广义植被归一化指数(generalized difference vegetation index,GDVI) | | [53] |
| 双波段增强植被指数(two-band enhanced vegetation index,EVI2) | | [54] |
| 扩展植被归一化指数(extended NDVI,ENDVI) | | [55] |
| 扩展植被增强指数(extented enhanced vegetation index, EEVI) | | [55] |
①式中: B表示蓝光波段; G表示绿光波段; R表示红光波段; NIR表示近红外波段; SWIR1和SWIR2分别表示短波红外波段1和2. ...
... [
46]
| 盐分指数(salinity index,S6) | | [46] |
| 盐分比指数(salinity ratio index,SAIO) | | [47] |
| 黏土指数(clay index,CLEX) | | [47] |
| 石膏指数(gypsum index,GYEX) | | [47] |
| 亮度指数(brightness index,BRI) | | [47] |
| 碳酸盐岩指数(carbonate index,CAEX) | | [47] |
| 植被指数 | 简单比值指数(simple ratio vegetation index,SR) | | [48] |
| 冠层响应盐指数(canopy response salinity index,CRSI) | | [49] |
| 归一化植被指数(normalized difference infrared index,NDVI) | | [45] |
| 增强植被指数(enhanced vegetation index,EVI) | | [50] |
| 差值植被指数(difference vegetation index,DVI) | | [51] |
| 修改土壤调节植被指数(modified soil adjusted vegetation index,MSAVI) | | [52] |
| 大气阻抗植被指数(atmospherically resistant vegetation index,ARVI) | | [52] |
| 广义植被归一化指数(generalized difference vegetation index,GDVI) | | [53] |
| 双波段增强植被指数(two-band enhanced vegetation index,EVI2) | | [54] |
| 扩展植被归一化指数(extended NDVI,ENDVI) | | [55] |
| 扩展植被增强指数(extented enhanced vegetation index, EEVI) | | [55] |
①式中: B表示蓝光波段; G表示绿光波段; R表示红光波段; NIR表示近红外波段; SWIR1和SWIR2分别表示短波红外波段1和2. ...
... [
46]
| 盐分比指数(salinity ratio index,SAIO) | | [47] |
| 黏土指数(clay index,CLEX) | | [47] |
| 石膏指数(gypsum index,GYEX) | | [47] |
| 亮度指数(brightness index,BRI) | | [47] |
| 碳酸盐岩指数(carbonate index,CAEX) | | [47] |
| 植被指数 | 简单比值指数(simple ratio vegetation index,SR) | | [48] |
| 冠层响应盐指数(canopy response salinity index,CRSI) | | [49] |
| 归一化植被指数(normalized difference infrared index,NDVI) | | [45] |
| 增强植被指数(enhanced vegetation index,EVI) | | [50] |
| 差值植被指数(difference vegetation index,DVI) | | [51] |
| 修改土壤调节植被指数(modified soil adjusted vegetation index,MSAVI) | | [52] |
| 大气阻抗植被指数(atmospherically resistant vegetation index,ARVI) | | [52] |
| 广义植被归一化指数(generalized difference vegetation index,GDVI) | | [53] |
| 双波段增强植被指数(two-band enhanced vegetation index,EVI2) | | [54] |
| 扩展植被归一化指数(extended NDVI,ENDVI) | | [55] |
| 扩展植被增强指数(extented enhanced vegetation index, EEVI) | | [55] |
①式中: B表示蓝光波段; G表示绿光波段; R表示红光波段; NIR表示近红外波段; SWIR1和SWIR2分别表示短波红外波段1和2. ...
Digital mapping of soil salinity in Ardakan region,central Iran
5
2014
... Modeling exponential formula
Tab.1 | 指数类型 | 指数 | 指数公式① | 参考文献 |
| 盐分指数 | 盐分指数(salinity index,SI-T) | | [44] |
| 盐分指数(normalized difference salinity index,NDSI) | | [45] |
| 盐分指数(salinity index1,SI1) | | [45] |
| 盐分指数(salinity index1,SI2) | | [45] |
| 盐分指数(salinity index1,SI3) | | [45] |
| 盐分指数(salinity index,S1) | | [46] |
| 盐分指数(salinity index,S2) | | [46] |
| 盐分指数(salinity index,S3) | | [46] |
| 盐分指数(salinity index,S5) | | [46] |
| 盐分指数(salinity index,S6) | | [46] |
| 盐分比指数(salinity ratio index,SAIO) | | [47] |
| 黏土指数(clay index,CLEX) | | [47] |
| 石膏指数(gypsum index,GYEX) | | [47] |
| 亮度指数(brightness index,BRI) | | [47] |
| 碳酸盐岩指数(carbonate index,CAEX) | | [47] |
| 植被指数 | 简单比值指数(simple ratio vegetation index,SR) | | [48] |
| 冠层响应盐指数(canopy response salinity index,CRSI) | | [49] |
| 归一化植被指数(normalized difference infrared index,NDVI) | | [45] |
| 增强植被指数(enhanced vegetation index,EVI) | | [50] |
| 差值植被指数(difference vegetation index,DVI) | | [51] |
| 修改土壤调节植被指数(modified soil adjusted vegetation index,MSAVI) | | [52] |
| 大气阻抗植被指数(atmospherically resistant vegetation index,ARVI) | | [52] |
| 广义植被归一化指数(generalized difference vegetation index,GDVI) | | [53] |
| 双波段增强植被指数(two-band enhanced vegetation index,EVI2) | | [54] |
| 扩展植被归一化指数(extended NDVI,ENDVI) | | [55] |
| 扩展植被增强指数(extented enhanced vegetation index, EEVI) | | [55] |
①式中: B表示蓝光波段; G表示绿光波段; R表示红光波段; NIR表示近红外波段; SWIR1和SWIR2分别表示短波红外波段1和2. ...
... [
47]
| 石膏指数(gypsum index,GYEX) | | [47] |
| 亮度指数(brightness index,BRI) | | [47] |
| 碳酸盐岩指数(carbonate index,CAEX) | | [47] |
| 植被指数 | 简单比值指数(simple ratio vegetation index,SR) | | [48] |
| 冠层响应盐指数(canopy response salinity index,CRSI) | | [49] |
| 归一化植被指数(normalized difference infrared index,NDVI) | | [45] |
| 增强植被指数(enhanced vegetation index,EVI) | | [50] |
| 差值植被指数(difference vegetation index,DVI) | | [51] |
| 修改土壤调节植被指数(modified soil adjusted vegetation index,MSAVI) | | [52] |
| 大气阻抗植被指数(atmospherically resistant vegetation index,ARVI) | | [52] |
| 广义植被归一化指数(generalized difference vegetation index,GDVI) | | [53] |
| 双波段增强植被指数(two-band enhanced vegetation index,EVI2) | | [54] |
| 扩展植被归一化指数(extended NDVI,ENDVI) | | [55] |
| 扩展植被增强指数(extented enhanced vegetation index, EEVI) | | [55] |
①式中: B表示蓝光波段; G表示绿光波段; R表示红光波段; NIR表示近红外波段; SWIR1和SWIR2分别表示短波红外波段1和2. ...
... [
47]
| 亮度指数(brightness index,BRI) | | [47] |
| 碳酸盐岩指数(carbonate index,CAEX) | | [47] |
| 植被指数 | 简单比值指数(simple ratio vegetation index,SR) | | [48] |
| 冠层响应盐指数(canopy response salinity index,CRSI) | | [49] |
| 归一化植被指数(normalized difference infrared index,NDVI) | | [45] |
| 增强植被指数(enhanced vegetation index,EVI) | | [50] |
| 差值植被指数(difference vegetation index,DVI) | | [51] |
| 修改土壤调节植被指数(modified soil adjusted vegetation index,MSAVI) | | [52] |
| 大气阻抗植被指数(atmospherically resistant vegetation index,ARVI) | | [52] |
| 广义植被归一化指数(generalized difference vegetation index,GDVI) | | [53] |
| 双波段增强植被指数(two-band enhanced vegetation index,EVI2) | | [54] |
| 扩展植被归一化指数(extended NDVI,ENDVI) | | [55] |
| 扩展植被增强指数(extented enhanced vegetation index, EEVI) | | [55] |
①式中: B表示蓝光波段; G表示绿光波段; R表示红光波段; NIR表示近红外波段; SWIR1和SWIR2分别表示短波红外波段1和2. ...
... [
47]
| 碳酸盐岩指数(carbonate index,CAEX) | | [47] |
| 植被指数 | 简单比值指数(simple ratio vegetation index,SR) | | [48] |
| 冠层响应盐指数(canopy response salinity index,CRSI) | | [49] |
| 归一化植被指数(normalized difference infrared index,NDVI) | | [45] |
| 增强植被指数(enhanced vegetation index,EVI) | | [50] |
| 差值植被指数(difference vegetation index,DVI) | | [51] |
| 修改土壤调节植被指数(modified soil adjusted vegetation index,MSAVI) | | [52] |
| 大气阻抗植被指数(atmospherically resistant vegetation index,ARVI) | | [52] |
| 广义植被归一化指数(generalized difference vegetation index,GDVI) | | [53] |
| 双波段增强植被指数(two-band enhanced vegetation index,EVI2) | | [54] |
| 扩展植被归一化指数(extended NDVI,ENDVI) | | [55] |
| 扩展植被增强指数(extented enhanced vegetation index, EEVI) | | [55] |
①式中: B表示蓝光波段; G表示绿光波段; R表示红光波段; NIR表示近红外波段; SWIR1和SWIR2分别表示短波红外波段1和2. ...
... [
47]
| 植被指数 | 简单比值指数(simple ratio vegetation index,SR) | | [48] |
| 冠层响应盐指数(canopy response salinity index,CRSI) | | [49] |
| 归一化植被指数(normalized difference infrared index,NDVI) | | [45] |
| 增强植被指数(enhanced vegetation index,EVI) | | [50] |
| 差值植被指数(difference vegetation index,DVI) | | [51] |
| 修改土壤调节植被指数(modified soil adjusted vegetation index,MSAVI) | | [52] |
| 大气阻抗植被指数(atmospherically resistant vegetation index,ARVI) | | [52] |
| 广义植被归一化指数(generalized difference vegetation index,GDVI) | | [53] |
| 双波段增强植被指数(two-band enhanced vegetation index,EVI2) | | [54] |
| 扩展植被归一化指数(extended NDVI,ENDVI) | | [55] |
| 扩展植被增强指数(extented enhanced vegetation index, EEVI) | | [55] |
①式中: B表示蓝光波段; G表示绿光波段; R表示红光波段; NIR表示近红外波段; SWIR1和SWIR2分别表示短波红外波段1和2. ...
Evaluation of vegetation indices and modified simple ratio for boreal applications
1
1996
... Modeling exponential formula
Tab.1 | 指数类型 | 指数 | 指数公式① | 参考文献 |
| 盐分指数 | 盐分指数(salinity index,SI-T) | | [44] |
| 盐分指数(normalized difference salinity index,NDSI) | | [45] |
| 盐分指数(salinity index1,SI1) | | [45] |
| 盐分指数(salinity index1,SI2) | | [45] |
| 盐分指数(salinity index1,SI3) | | [45] |
| 盐分指数(salinity index,S1) | | [46] |
| 盐分指数(salinity index,S2) | | [46] |
| 盐分指数(salinity index,S3) | | [46] |
| 盐分指数(salinity index,S5) | | [46] |
| 盐分指数(salinity index,S6) | | [46] |
| 盐分比指数(salinity ratio index,SAIO) | | [47] |
| 黏土指数(clay index,CLEX) | | [47] |
| 石膏指数(gypsum index,GYEX) | | [47] |
| 亮度指数(brightness index,BRI) | | [47] |
| 碳酸盐岩指数(carbonate index,CAEX) | | [47] |
| 植被指数 | 简单比值指数(simple ratio vegetation index,SR) | | [48] |
| 冠层响应盐指数(canopy response salinity index,CRSI) | | [49] |
| 归一化植被指数(normalized difference infrared index,NDVI) | | [45] |
| 增强植被指数(enhanced vegetation index,EVI) | | [50] |
| 差值植被指数(difference vegetation index,DVI) | | [51] |
| 修改土壤调节植被指数(modified soil adjusted vegetation index,MSAVI) | | [52] |
| 大气阻抗植被指数(atmospherically resistant vegetation index,ARVI) | | [52] |
| 广义植被归一化指数(generalized difference vegetation index,GDVI) | | [53] |
| 双波段增强植被指数(two-band enhanced vegetation index,EVI2) | | [54] |
| 扩展植被归一化指数(extended NDVI,ENDVI) | | [55] |
| 扩展植被增强指数(extented enhanced vegetation index, EEVI) | | [55] |
①式中: B表示蓝光波段; G表示绿光波段; R表示红光波段; NIR表示近红外波段; SWIR1和SWIR2分别表示短波红外波段1和2. ...
Comparing prediction power and stability of broadband and hyperspectral vegetation indices for estimation of green leaf area index and canopy chlorophyll density
1
2001
... Modeling exponential formula
Tab.1 | 指数类型 | 指数 | 指数公式① | 参考文献 |
| 盐分指数 | 盐分指数(salinity index,SI-T) | | [44] |
| 盐分指数(normalized difference salinity index,NDSI) | | [45] |
| 盐分指数(salinity index1,SI1) | | [45] |
| 盐分指数(salinity index1,SI2) | | [45] |
| 盐分指数(salinity index1,SI3) | | [45] |
| 盐分指数(salinity index,S1) | | [46] |
| 盐分指数(salinity index,S2) | | [46] |
| 盐分指数(salinity index,S3) | | [46] |
| 盐分指数(salinity index,S5) | | [46] |
| 盐分指数(salinity index,S6) | | [46] |
| 盐分比指数(salinity ratio index,SAIO) | | [47] |
| 黏土指数(clay index,CLEX) | | [47] |
| 石膏指数(gypsum index,GYEX) | | [47] |
| 亮度指数(brightness index,BRI) | | [47] |
| 碳酸盐岩指数(carbonate index,CAEX) | | [47] |
| 植被指数 | 简单比值指数(simple ratio vegetation index,SR) | | [48] |
| 冠层响应盐指数(canopy response salinity index,CRSI) | | [49] |
| 归一化植被指数(normalized difference infrared index,NDVI) | | [45] |
| 增强植被指数(enhanced vegetation index,EVI) | | [50] |
| 差值植被指数(difference vegetation index,DVI) | | [51] |
| 修改土壤调节植被指数(modified soil adjusted vegetation index,MSAVI) | | [52] |
| 大气阻抗植被指数(atmospherically resistant vegetation index,ARVI) | | [52] |
| 广义植被归一化指数(generalized difference vegetation index,GDVI) | | [53] |
| 双波段增强植被指数(two-band enhanced vegetation index,EVI2) | | [54] |
| 扩展植被归一化指数(extended NDVI,ENDVI) | | [55] |
| 扩展植被增强指数(extented enhanced vegetation index, EEVI) | | [55] |
①式中: B表示蓝光波段; G表示绿光波段; R表示红光波段; NIR表示近红外波段; SWIR1和SWIR2分别表示短波红外波段1和2. ...
A feedback based modification of the NDVI to minimize canopy background and atmospheric noise
1
1995
... Modeling exponential formula
Tab.1 | 指数类型 | 指数 | 指数公式① | 参考文献 |
| 盐分指数 | 盐分指数(salinity index,SI-T) | | [44] |
| 盐分指数(normalized difference salinity index,NDSI) | | [45] |
| 盐分指数(salinity index1,SI1) | | [45] |
| 盐分指数(salinity index1,SI2) | | [45] |
| 盐分指数(salinity index1,SI3) | | [45] |
| 盐分指数(salinity index,S1) | | [46] |
| 盐分指数(salinity index,S2) | | [46] |
| 盐分指数(salinity index,S3) | | [46] |
| 盐分指数(salinity index,S5) | | [46] |
| 盐分指数(salinity index,S6) | | [46] |
| 盐分比指数(salinity ratio index,SAIO) | | [47] |
| 黏土指数(clay index,CLEX) | | [47] |
| 石膏指数(gypsum index,GYEX) | | [47] |
| 亮度指数(brightness index,BRI) | | [47] |
| 碳酸盐岩指数(carbonate index,CAEX) | | [47] |
| 植被指数 | 简单比值指数(simple ratio vegetation index,SR) | | [48] |
| 冠层响应盐指数(canopy response salinity index,CRSI) | | [49] |
| 归一化植被指数(normalized difference infrared index,NDVI) | | [45] |
| 增强植被指数(enhanced vegetation index,EVI) | | [50] |
| 差值植被指数(difference vegetation index,DVI) | | [51] |
| 修改土壤调节植被指数(modified soil adjusted vegetation index,MSAVI) | | [52] |
| 大气阻抗植被指数(atmospherically resistant vegetation index,ARVI) | | [52] |
| 广义植被归一化指数(generalized difference vegetation index,GDVI) | | [53] |
| 双波段增强植被指数(two-band enhanced vegetation index,EVI2) | | [54] |
| 扩展植被归一化指数(extended NDVI,ENDVI) | | [55] |
| 扩展植被增强指数(extented enhanced vegetation index, EEVI) | | [55] |
①式中: B表示蓝光波段; G表示绿光波段; R表示红光波段; NIR表示近红外波段; SWIR1和SWIR2分别表示短波红外波段1和2. ...
Analysis of NDVI and scaled difference vegetation index retrievals of vegetation fraction
1
2006
... Modeling exponential formula
Tab.1 | 指数类型 | 指数 | 指数公式① | 参考文献 |
| 盐分指数 | 盐分指数(salinity index,SI-T) | | [44] |
| 盐分指数(normalized difference salinity index,NDSI) | | [45] |
| 盐分指数(salinity index1,SI1) | | [45] |
| 盐分指数(salinity index1,SI2) | | [45] |
| 盐分指数(salinity index1,SI3) | | [45] |
| 盐分指数(salinity index,S1) | | [46] |
| 盐分指数(salinity index,S2) | | [46] |
| 盐分指数(salinity index,S3) | | [46] |
| 盐分指数(salinity index,S5) | | [46] |
| 盐分指数(salinity index,S6) | | [46] |
| 盐分比指数(salinity ratio index,SAIO) | | [47] |
| 黏土指数(clay index,CLEX) | | [47] |
| 石膏指数(gypsum index,GYEX) | | [47] |
| 亮度指数(brightness index,BRI) | | [47] |
| 碳酸盐岩指数(carbonate index,CAEX) | | [47] |
| 植被指数 | 简单比值指数(simple ratio vegetation index,SR) | | [48] |
| 冠层响应盐指数(canopy response salinity index,CRSI) | | [49] |
| 归一化植被指数(normalized difference infrared index,NDVI) | | [45] |
| 增强植被指数(enhanced vegetation index,EVI) | | [50] |
| 差值植被指数(difference vegetation index,DVI) | | [51] |
| 修改土壤调节植被指数(modified soil adjusted vegetation index,MSAVI) | | [52] |
| 大气阻抗植被指数(atmospherically resistant vegetation index,ARVI) | | [52] |
| 广义植被归一化指数(generalized difference vegetation index,GDVI) | | [53] |
| 双波段增强植被指数(two-band enhanced vegetation index,EVI2) | | [54] |
| 扩展植被归一化指数(extended NDVI,ENDVI) | | [55] |
| 扩展植被增强指数(extented enhanced vegetation index, EEVI) | | [55] |
①式中: B表示蓝光波段; G表示绿光波段; R表示红光波段; NIR表示近红外波段; SWIR1和SWIR2分别表示短波红外波段1和2. ...
A modified soil adjusted vegetation index
2
1994
... Modeling exponential formula
Tab.1 | 指数类型 | 指数 | 指数公式① | 参考文献 |
| 盐分指数 | 盐分指数(salinity index,SI-T) | | [44] |
| 盐分指数(normalized difference salinity index,NDSI) | | [45] |
| 盐分指数(salinity index1,SI1) | | [45] |
| 盐分指数(salinity index1,SI2) | | [45] |
| 盐分指数(salinity index1,SI3) | | [45] |
| 盐分指数(salinity index,S1) | | [46] |
| 盐分指数(salinity index,S2) | | [46] |
| 盐分指数(salinity index,S3) | | [46] |
| 盐分指数(salinity index,S5) | | [46] |
| 盐分指数(salinity index,S6) | | [46] |
| 盐分比指数(salinity ratio index,SAIO) | | [47] |
| 黏土指数(clay index,CLEX) | | [47] |
| 石膏指数(gypsum index,GYEX) | | [47] |
| 亮度指数(brightness index,BRI) | | [47] |
| 碳酸盐岩指数(carbonate index,CAEX) | | [47] |
| 植被指数 | 简单比值指数(simple ratio vegetation index,SR) | | [48] |
| 冠层响应盐指数(canopy response salinity index,CRSI) | | [49] |
| 归一化植被指数(normalized difference infrared index,NDVI) | | [45] |
| 增强植被指数(enhanced vegetation index,EVI) | | [50] |
| 差值植被指数(difference vegetation index,DVI) | | [51] |
| 修改土壤调节植被指数(modified soil adjusted vegetation index,MSAVI) | | [52] |
| 大气阻抗植被指数(atmospherically resistant vegetation index,ARVI) | | [52] |
| 广义植被归一化指数(generalized difference vegetation index,GDVI) | | [53] |
| 双波段增强植被指数(two-band enhanced vegetation index,EVI2) | | [54] |
| 扩展植被归一化指数(extended NDVI,ENDVI) | | [55] |
| 扩展植被增强指数(extented enhanced vegetation index, EEVI) | | [55] |
①式中: B表示蓝光波段; G表示绿光波段; R表示红光波段; NIR表示近红外波段; SWIR1和SWIR2分别表示短波红外波段1和2. ...
... [
52]
| 广义植被归一化指数(generalized difference vegetation index,GDVI) | | [53] |
| 双波段增强植被指数(two-band enhanced vegetation index,EVI2) | | [54] |
| 扩展植被归一化指数(extended NDVI,ENDVI) | | [55] |
| 扩展植被增强指数(extented enhanced vegetation index, EEVI) | | [55] |
①式中: B表示蓝光波段; G表示绿光波段; R表示红光波段; NIR表示近红外波段; SWIR1和SWIR2分别表示短波红外波段1和2. ...
Mapping soil salinity changes using remote sensing in Central Iraq
1
2014
... Modeling exponential formula
Tab.1 | 指数类型 | 指数 | 指数公式① | 参考文献 |
| 盐分指数 | 盐分指数(salinity index,SI-T) | | [44] |
| 盐分指数(normalized difference salinity index,NDSI) | | [45] |
| 盐分指数(salinity index1,SI1) | | [45] |
| 盐分指数(salinity index1,SI2) | | [45] |
| 盐分指数(salinity index1,SI3) | | [45] |
| 盐分指数(salinity index,S1) | | [46] |
| 盐分指数(salinity index,S2) | | [46] |
| 盐分指数(salinity index,S3) | | [46] |
| 盐分指数(salinity index,S5) | | [46] |
| 盐分指数(salinity index,S6) | | [46] |
| 盐分比指数(salinity ratio index,SAIO) | | [47] |
| 黏土指数(clay index,CLEX) | | [47] |
| 石膏指数(gypsum index,GYEX) | | [47] |
| 亮度指数(brightness index,BRI) | | [47] |
| 碳酸盐岩指数(carbonate index,CAEX) | | [47] |
| 植被指数 | 简单比值指数(simple ratio vegetation index,SR) | | [48] |
| 冠层响应盐指数(canopy response salinity index,CRSI) | | [49] |
| 归一化植被指数(normalized difference infrared index,NDVI) | | [45] |
| 增强植被指数(enhanced vegetation index,EVI) | | [50] |
| 差值植被指数(difference vegetation index,DVI) | | [51] |
| 修改土壤调节植被指数(modified soil adjusted vegetation index,MSAVI) | | [52] |
| 大气阻抗植被指数(atmospherically resistant vegetation index,ARVI) | | [52] |
| 广义植被归一化指数(generalized difference vegetation index,GDVI) | | [53] |
| 双波段增强植被指数(two-band enhanced vegetation index,EVI2) | | [54] |
| 扩展植被归一化指数(extended NDVI,ENDVI) | | [55] |
| 扩展植被增强指数(extented enhanced vegetation index, EEVI) | | [55] |
①式中: B表示蓝光波段; G表示绿光波段; R表示红光波段; NIR表示近红外波段; SWIR1和SWIR2分别表示短波红外波段1和2. ...
Extracting salinized soil information in arid areas using ETM+ data
1
2008
... Modeling exponential formula
Tab.1 | 指数类型 | 指数 | 指数公式① | 参考文献 |
| 盐分指数 | 盐分指数(salinity index,SI-T) | | [44] |
| 盐分指数(normalized difference salinity index,NDSI) | | [45] |
| 盐分指数(salinity index1,SI1) | | [45] |
| 盐分指数(salinity index1,SI2) | | [45] |
| 盐分指数(salinity index1,SI3) | | [45] |
| 盐分指数(salinity index,S1) | | [46] |
| 盐分指数(salinity index,S2) | | [46] |
| 盐分指数(salinity index,S3) | | [46] |
| 盐分指数(salinity index,S5) | | [46] |
| 盐分指数(salinity index,S6) | | [46] |
| 盐分比指数(salinity ratio index,SAIO) | | [47] |
| 黏土指数(clay index,CLEX) | | [47] |
| 石膏指数(gypsum index,GYEX) | | [47] |
| 亮度指数(brightness index,BRI) | | [47] |
| 碳酸盐岩指数(carbonate index,CAEX) | | [47] |
| 植被指数 | 简单比值指数(simple ratio vegetation index,SR) | | [48] |
| 冠层响应盐指数(canopy response salinity index,CRSI) | | [49] |
| 归一化植被指数(normalized difference infrared index,NDVI) | | [45] |
| 增强植被指数(enhanced vegetation index,EVI) | | [50] |
| 差值植被指数(difference vegetation index,DVI) | | [51] |
| 修改土壤调节植被指数(modified soil adjusted vegetation index,MSAVI) | | [52] |
| 大气阻抗植被指数(atmospherically resistant vegetation index,ARVI) | | [52] |
| 广义植被归一化指数(generalized difference vegetation index,GDVI) | | [53] |
| 双波段增强植被指数(two-band enhanced vegetation index,EVI2) | | [54] |
| 扩展植被归一化指数(extended NDVI,ENDVI) | | [55] |
| 扩展植被增强指数(extented enhanced vegetation index, EEVI) | | [55] |
①式中: B表示蓝光波段; G表示绿光波段; R表示红光波段; NIR表示近红外波段; SWIR1和SWIR2分别表示短波红外波段1和2. ...
Remote sensing inversion of saline soil salinity based on modified vegetation index in estuary area of Yellow River
2
2015
... Modeling exponential formula
Tab.1 | 指数类型 | 指数 | 指数公式① | 参考文献 |
| 盐分指数 | 盐分指数(salinity index,SI-T) | | [44] |
| 盐分指数(normalized difference salinity index,NDSI) | | [45] |
| 盐分指数(salinity index1,SI1) | | [45] |
| 盐分指数(salinity index1,SI2) | | [45] |
| 盐分指数(salinity index1,SI3) | | [45] |
| 盐分指数(salinity index,S1) | | [46] |
| 盐分指数(salinity index,S2) | | [46] |
| 盐分指数(salinity index,S3) | | [46] |
| 盐分指数(salinity index,S5) | | [46] |
| 盐分指数(salinity index,S6) | | [46] |
| 盐分比指数(salinity ratio index,SAIO) | | [47] |
| 黏土指数(clay index,CLEX) | | [47] |
| 石膏指数(gypsum index,GYEX) | | [47] |
| 亮度指数(brightness index,BRI) | | [47] |
| 碳酸盐岩指数(carbonate index,CAEX) | | [47] |
| 植被指数 | 简单比值指数(simple ratio vegetation index,SR) | | [48] |
| 冠层响应盐指数(canopy response salinity index,CRSI) | | [49] |
| 归一化植被指数(normalized difference infrared index,NDVI) | | [45] |
| 增强植被指数(enhanced vegetation index,EVI) | | [50] |
| 差值植被指数(difference vegetation index,DVI) | | [51] |
| 修改土壤调节植被指数(modified soil adjusted vegetation index,MSAVI) | | [52] |
| 大气阻抗植被指数(atmospherically resistant vegetation index,ARVI) | | [52] |
| 广义植被归一化指数(generalized difference vegetation index,GDVI) | | [53] |
| 双波段增强植被指数(two-band enhanced vegetation index,EVI2) | | [54] |
| 扩展植被归一化指数(extended NDVI,ENDVI) | | [55] |
| 扩展植被增强指数(extented enhanced vegetation index, EEVI) | | [55] |
①式中: B表示蓝光波段; G表示绿光波段; R表示红光波段; NIR表示近红外波段; SWIR1和SWIR2分别表示短波红外波段1和2. ...
... [
55]
①式中: B表示蓝光波段; G表示绿光波段; R表示红光波段; NIR表示近红外波段; SWIR1和SWIR2分别表示短波红外波段1和2. ...
Regional-scale soil salinity assessment using Landsat ETM+ canopy reflectance
3
2015
... 由于土壤盐渍化情况很大程度地受到气候因素、土壤理化性质、地形因素、空间位置和植被因素等环境变量的影响[24],因此可引入环境变量遥感产品数据参与建模.气候因素包括气温、降水等,土壤理化性质包括土壤质地、地表温度、地下水位、土壤湿度等,植物因素主要以一系列植被指数来表征[29],这些环境变量因子数据可以通过产品数据或由原始遥感影像通过指数计算获得,空间位置要根据样点坐标数据计算获得[24,56],地形因素包括数字高程模型(digital elevation model,DEM)数据及其衍生数据,地下水位数据可由测站观测井获得[57]. ...
... 2)多元线性回归模型(multiple linear regression model,MLR)是将多个变量进行最优组合来预测因变量,原理简单,应用广泛[2,8-9,17,22,24,40⇓-42,56,58-59],其公式为: ...
... 除上述模型外一些新型模型与改进模型也被用于遥感监测模型的构建,如逐步多元回归(stepwise multiple regression analysis,SMR)模型[17,35,64]、岭回归模型(ridge regression,RR)模型[65-66]、普通最小二乘法(ordinary least square,OLS)[67-68]、空间自回归(spatial autore gression,SAR)模型[56]、决策树算法(decision tree algorithm,DTA)[67]、支持向量回归(support vector regression,SVR)模型[12,25,69]、粒子群优化支持向量机(particle swarm optimization support vector machine,PSO-SVM)模型[15,70]、网格搜索支持向量机(grid search support vector machine, GS-SVM)[71]、差分进化支持向量机(differential evolution support vector machine,DE-SVM)模型 [15]、卷积神经网络(convolutional neural network,CNN)模型[70]、多元自适应回归样条(multivariate adaptive regression spline,MARS)模型[1,25,72]、人工神经网络(artificial neural network,ANN)模型[7,26]、Bootstrap-BP神经网络模型[43]、极限学习机(extra learning machine,ELM)[61,73]、结构方程模型[74](structural equation model,SEM)、溶质运移模型[28]、地理加权回归(geographically weighted regression,GWR)模型[24,66]、多布森模型(Dobson model)[75]和修正的残差克里金模型[76]等模型. ...
Soil salt content and its relationship with crops and groundwater depth in the Yinchuan Plain (China) using remote sensing
1
2012
... 由于土壤盐渍化情况很大程度地受到气候因素、土壤理化性质、地形因素、空间位置和植被因素等环境变量的影响[24],因此可引入环境变量遥感产品数据参与建模.气候因素包括气温、降水等,土壤理化性质包括土壤质地、地表温度、地下水位、土壤湿度等,植物因素主要以一系列植被指数来表征[29],这些环境变量因子数据可以通过产品数据或由原始遥感影像通过指数计算获得,空间位置要根据样点坐标数据计算获得[24,56],地形因素包括数字高程模型(digital elevation model,DEM)数据及其衍生数据,地下水位数据可由测站观测井获得[57]. ...
艾比湖流域盐渍土含水量光谱特征分析与建模
1
2017
... 2)多元线性回归模型(multiple linear regression model,MLR)是将多个变量进行最优组合来预测因变量,原理简单,应用广泛[2,8-9,17,22,24,40⇓-42,56,58-59],其公式为: ...
艾比湖流域盐渍土含水量光谱特征分析与建模
1
2017
... 2)多元线性回归模型(multiple linear regression model,MLR)是将多个变量进行最优组合来预测因变量,原理简单,应用广泛[2,8-9,17,22,24,40⇓-42,56,58-59],其公式为: ...
Soil salinity detection from satellite image analysis:An integrated approach of salinity indices and field data
1
2016
... 2)多元线性回归模型(multiple linear regression model,MLR)是将多个变量进行最优组合来预测因变量,原理简单,应用广泛[2,8-9,17,22,24,40⇓-42,56,58-59],其公式为: ...
Optical remote-sensing data based research on detecting soil salinity at different depth in an arid-area oasis,Xinjiang,China
2
2018
... 3)偏最小二乘回归建模是结合主成分分析与MLR特点的一种新型多元统计数据分析算法,其主要是针对多因变量对多自变量的回归建模,能较好地解决样本个数少于变量个数等问题[60-61],可用于各变量之间具有多重共线性时,该算法不再直接考虑因变量与自变量的回归建模,而是对变量系统中的信息重新进行综合筛选,从中选取若干对系统具有最佳解释能力的新成分用于回归建模.偏最小二乘回归的基本步骤如下: 首先,分析自变量与因变量之间的关系,要从p个自变量和因变量中分别提取出p个自变量的线性组合以及p个因变量的线性组合,公式为: ...
... 4)BP-神经网络被广泛用于土壤盐分反演中[13,60],主要由信号的正向传播和误差的反向传播这2个过程组成.正向传播就是按照输入层、隐藏层和输出层的顺序依次输出,若实际输出值与期望输出值相差较大,则开始进行误差的反向传播,其与正向传播的方向刚好相反,就是将输出误差按照输出层、隐藏层和输入层的顺序输出,以此可对各单元的权重进行修正,通过不断修正,减少实际输出值与期望输出值的差距,从而达到预测的目的. ...
基于变量优选与机器学习的干旱区湿地土壤盐渍化数字制图
3
2020
... 3)偏最小二乘回归建模是结合主成分分析与MLR特点的一种新型多元统计数据分析算法,其主要是针对多因变量对多自变量的回归建模,能较好地解决样本个数少于变量个数等问题[60-61],可用于各变量之间具有多重共线性时,该算法不再直接考虑因变量与自变量的回归建模,而是对变量系统中的信息重新进行综合筛选,从中选取若干对系统具有最佳解释能力的新成分用于回归建模.偏最小二乘回归的基本步骤如下: 首先,分析自变量与因变量之间的关系,要从p个自变量和因变量中分别提取出p个自变量的线性组合以及p个因变量的线性组合,公式为: ...
... (6)随机森林是一种新型的分类和预测模型[61],“随机森林”的名称取自“随机”和”“森林”,“随机”包括随机选取训练样本集和随机选取分裂属性集,这使得随机森林具有良好的抗噪能力.“森林”即有许多的决策树,其实这也是随机森林的主要思想-集成思想的体现.随机森林是决策树的组合,每棵决策树都是通过对原始数据集中随机生成新的数据集来训练生成,随机森林决策的结果是多颗决策树的决策结果. ...
... 除上述模型外一些新型模型与改进模型也被用于遥感监测模型的构建,如逐步多元回归(stepwise multiple regression analysis,SMR)模型[17,35,64]、岭回归模型(ridge regression,RR)模型[65-66]、普通最小二乘法(ordinary least square,OLS)[67-68]、空间自回归(spatial autore gression,SAR)模型[56]、决策树算法(decision tree algorithm,DTA)[67]、支持向量回归(support vector regression,SVR)模型[12,25,69]、粒子群优化支持向量机(particle swarm optimization support vector machine,PSO-SVM)模型[15,70]、网格搜索支持向量机(grid search support vector machine, GS-SVM)[71]、差分进化支持向量机(differential evolution support vector machine,DE-SVM)模型 [15]、卷积神经网络(convolutional neural network,CNN)模型[70]、多元自适应回归样条(multivariate adaptive regression spline,MARS)模型[1,25,72]、人工神经网络(artificial neural network,ANN)模型[7,26]、Bootstrap-BP神经网络模型[43]、极限学习机(extra learning machine,ELM)[61,73]、结构方程模型[74](structural equation model,SEM)、溶质运移模型[28]、地理加权回归(geographically weighted regression,GWR)模型[24,66]、多布森模型(Dobson model)[75]和修正的残差克里金模型[76]等模型. ...
基于变量优选与机器学习的干旱区湿地土壤盐渍化数字制图
3
2020
... 3)偏最小二乘回归建模是结合主成分分析与MLR特点的一种新型多元统计数据分析算法,其主要是针对多因变量对多自变量的回归建模,能较好地解决样本个数少于变量个数等问题[60-61],可用于各变量之间具有多重共线性时,该算法不再直接考虑因变量与自变量的回归建模,而是对变量系统中的信息重新进行综合筛选,从中选取若干对系统具有最佳解释能力的新成分用于回归建模.偏最小二乘回归的基本步骤如下: 首先,分析自变量与因变量之间的关系,要从p个自变量和因变量中分别提取出p个自变量的线性组合以及p个因变量的线性组合,公式为: ...
... (6)随机森林是一种新型的分类和预测模型[61],“随机森林”的名称取自“随机”和”“森林”,“随机”包括随机选取训练样本集和随机选取分裂属性集,这使得随机森林具有良好的抗噪能力.“森林”即有许多的决策树,其实这也是随机森林的主要思想-集成思想的体现.随机森林是决策树的组合,每棵决策树都是通过对原始数据集中随机生成新的数据集来训练生成,随机森林决策的结果是多颗决策树的决策结果. ...
... 除上述模型外一些新型模型与改进模型也被用于遥感监测模型的构建,如逐步多元回归(stepwise multiple regression analysis,SMR)模型[17,35,64]、岭回归模型(ridge regression,RR)模型[65-66]、普通最小二乘法(ordinary least square,OLS)[67-68]、空间自回归(spatial autore gression,SAR)模型[56]、决策树算法(decision tree algorithm,DTA)[67]、支持向量回归(support vector regression,SVR)模型[12,25,69]、粒子群优化支持向量机(particle swarm optimization support vector machine,PSO-SVM)模型[15,70]、网格搜索支持向量机(grid search support vector machine, GS-SVM)[71]、差分进化支持向量机(differential evolution support vector machine,DE-SVM)模型 [15]、卷积神经网络(convolutional neural network,CNN)模型[70]、多元自适应回归样条(multivariate adaptive regression spline,MARS)模型[1,25,72]、人工神经网络(artificial neural network,ANN)模型[7,26]、Bootstrap-BP神经网络模型[43]、极限学习机(extra learning machine,ELM)[61,73]、结构方程模型[74](structural equation model,SEM)、溶质运移模型[28]、地理加权回归(geographically weighted regression,GWR)模型[24,66]、多布森模型(Dobson model)[75]和修正的残差克里金模型[76]等模型. ...
基于全极化微波遥感的干旱区典型绿洲盐渍化信息提取
1
2018
... 5)SVM方法是一种新近的模式分类方法[62-63],对于解决小样本、 非线性及高维模式识别等问题具有优越性,它处理的是二元分类模型.二元模型假设一个土壤样本只属于一个类,并且只有2个类(C={c1,c2}).每个有l个类的分类任务都可以使用一对一方法被建模为二进制任务,其中一个训练l(l-1)/2个二进制分类器,每个分类器对应一对类.最后的决策是通过投票的方式做出的,即选择最常被预测的类作为输出,在使用时需要确定核函数和惩罚因子. ...
基于全极化微波遥感的干旱区典型绿洲盐渍化信息提取
1
2018
... 5)SVM方法是一种新近的模式分类方法[62-63],对于解决小样本、 非线性及高维模式识别等问题具有优越性,它处理的是二元分类模型.二元模型假设一个土壤样本只属于一个类,并且只有2个类(C={c1,c2}).每个有l个类的分类任务都可以使用一对一方法被建模为二进制任务,其中一个训练l(l-1)/2个二进制分类器,每个分类器对应一对类.最后的决策是通过投票的方式做出的,即选择最常被预测的类作为输出,在使用时需要确定核函数和惩罚因子. ...
Integrating remote sensing and landscape characteristics to estimate soil salinity using machine learning methods:A case study from Southern Xinjiang,China
1
2020
... 5)SVM方法是一种新近的模式分类方法[62-63],对于解决小样本、 非线性及高维模式识别等问题具有优越性,它处理的是二元分类模型.二元模型假设一个土壤样本只属于一个类,并且只有2个类(C={c1,c2}).每个有l个类的分类任务都可以使用一对一方法被建模为二进制任务,其中一个训练l(l-1)/2个二进制分类器,每个分类器对应一对类.最后的决策是通过投票的方式做出的,即选择最常被预测的类作为输出,在使用时需要确定核函数和惩罚因子. ...
Modeling of soil salinity within a semi-arid region using spectral analysis
1
2015
... 除上述模型外一些新型模型与改进模型也被用于遥感监测模型的构建,如逐步多元回归(stepwise multiple regression analysis,SMR)模型[17,35,64]、岭回归模型(ridge regression,RR)模型[65-66]、普通最小二乘法(ordinary least square,OLS)[67-68]、空间自回归(spatial autore gression,SAR)模型[56]、决策树算法(decision tree algorithm,DTA)[67]、支持向量回归(support vector regression,SVR)模型[12,25,69]、粒子群优化支持向量机(particle swarm optimization support vector machine,PSO-SVM)模型[15,70]、网格搜索支持向量机(grid search support vector machine, GS-SVM)[71]、差分进化支持向量机(differential evolution support vector machine,DE-SVM)模型 [15]、卷积神经网络(convolutional neural network,CNN)模型[70]、多元自适应回归样条(multivariate adaptive regression spline,MARS)模型[1,25,72]、人工神经网络(artificial neural network,ANN)模型[7,26]、Bootstrap-BP神经网络模型[43]、极限学习机(extra learning machine,ELM)[61,73]、结构方程模型[74](structural equation model,SEM)、溶质运移模型[28]、地理加权回归(geographically weighted regression,GWR)模型[24,66]、多布森模型(Dobson model)[75]和修正的残差克里金模型[76]等模型. ...
基于实测高光谱和Sentinel-2B影像的银川平原土壤盐分反演
1
2021
... 除上述模型外一些新型模型与改进模型也被用于遥感监测模型的构建,如逐步多元回归(stepwise multiple regression analysis,SMR)模型[17,35,64]、岭回归模型(ridge regression,RR)模型[65-66]、普通最小二乘法(ordinary least square,OLS)[67-68]、空间自回归(spatial autore gression,SAR)模型[56]、决策树算法(decision tree algorithm,DTA)[67]、支持向量回归(support vector regression,SVR)模型[12,25,69]、粒子群优化支持向量机(particle swarm optimization support vector machine,PSO-SVM)模型[15,70]、网格搜索支持向量机(grid search support vector machine, GS-SVM)[71]、差分进化支持向量机(differential evolution support vector machine,DE-SVM)模型 [15]、卷积神经网络(convolutional neural network,CNN)模型[70]、多元自适应回归样条(multivariate adaptive regression spline,MARS)模型[1,25,72]、人工神经网络(artificial neural network,ANN)模型[7,26]、Bootstrap-BP神经网络模型[43]、极限学习机(extra learning machine,ELM)[61,73]、结构方程模型[74](structural equation model,SEM)、溶质运移模型[28]、地理加权回归(geographically weighted regression,GWR)模型[24,66]、多布森模型(Dobson model)[75]和修正的残差克里金模型[76]等模型. ...
基于实测高光谱和Sentinel-2B影像的银川平原土壤盐分反演
1
2021
... 除上述模型外一些新型模型与改进模型也被用于遥感监测模型的构建,如逐步多元回归(stepwise multiple regression analysis,SMR)模型[17,35,64]、岭回归模型(ridge regression,RR)模型[65-66]、普通最小二乘法(ordinary least square,OLS)[67-68]、空间自回归(spatial autore gression,SAR)模型[56]、决策树算法(decision tree algorithm,DTA)[67]、支持向量回归(support vector regression,SVR)模型[12,25,69]、粒子群优化支持向量机(particle swarm optimization support vector machine,PSO-SVM)模型[15,70]、网格搜索支持向量机(grid search support vector machine, GS-SVM)[71]、差分进化支持向量机(differential evolution support vector machine,DE-SVM)模型 [15]、卷积神经网络(convolutional neural network,CNN)模型[70]、多元自适应回归样条(multivariate adaptive regression spline,MARS)模型[1,25,72]、人工神经网络(artificial neural network,ANN)模型[7,26]、Bootstrap-BP神经网络模型[43]、极限学习机(extra learning machine,ELM)[61,73]、结构方程模型[74](structural equation model,SEM)、溶质运移模型[28]、地理加权回归(geographically weighted regression,GWR)模型[24,66]、多布森模型(Dobson model)[75]和修正的残差克里金模型[76]等模型. ...
利用多源光谱信息反演宁夏银北地区干湿季土壤含盐量
2
2020
... 除上述模型外一些新型模型与改进模型也被用于遥感监测模型的构建,如逐步多元回归(stepwise multiple regression analysis,SMR)模型[17,35,64]、岭回归模型(ridge regression,RR)模型[65-66]、普通最小二乘法(ordinary least square,OLS)[67-68]、空间自回归(spatial autore gression,SAR)模型[56]、决策树算法(decision tree algorithm,DTA)[67]、支持向量回归(support vector regression,SVR)模型[12,25,69]、粒子群优化支持向量机(particle swarm optimization support vector machine,PSO-SVM)模型[15,70]、网格搜索支持向量机(grid search support vector machine, GS-SVM)[71]、差分进化支持向量机(differential evolution support vector machine,DE-SVM)模型 [15]、卷积神经网络(convolutional neural network,CNN)模型[70]、多元自适应回归样条(multivariate adaptive regression spline,MARS)模型[1,25,72]、人工神经网络(artificial neural network,ANN)模型[7,26]、Bootstrap-BP神经网络模型[43]、极限学习机(extra learning machine,ELM)[61,73]、结构方程模型[74](structural equation model,SEM)、溶质运移模型[28]、地理加权回归(geographically weighted regression,GWR)模型[24,66]、多布森模型(Dobson model)[75]和修正的残差克里金模型[76]等模型. ...
... ,66]、多布森模型(Dobson model)[75]和修正的残差克里金模型[76]等模型. ...
利用多源光谱信息反演宁夏银北地区干湿季土壤含盐量
2
2020
... 除上述模型外一些新型模型与改进模型也被用于遥感监测模型的构建,如逐步多元回归(stepwise multiple regression analysis,SMR)模型[17,35,64]、岭回归模型(ridge regression,RR)模型[65-66]、普通最小二乘法(ordinary least square,OLS)[67-68]、空间自回归(spatial autore gression,SAR)模型[56]、决策树算法(decision tree algorithm,DTA)[67]、支持向量回归(support vector regression,SVR)模型[12,25,69]、粒子群优化支持向量机(particle swarm optimization support vector machine,PSO-SVM)模型[15,70]、网格搜索支持向量机(grid search support vector machine, GS-SVM)[71]、差分进化支持向量机(differential evolution support vector machine,DE-SVM)模型 [15]、卷积神经网络(convolutional neural network,CNN)模型[70]、多元自适应回归样条(multivariate adaptive regression spline,MARS)模型[1,25,72]、人工神经网络(artificial neural network,ANN)模型[7,26]、Bootstrap-BP神经网络模型[43]、极限学习机(extra learning machine,ELM)[61,73]、结构方程模型[74](structural equation model,SEM)、溶质运移模型[28]、地理加权回归(geographically weighted regression,GWR)模型[24,66]、多布森模型(Dobson model)[75]和修正的残差克里金模型[76]等模型. ...
... ,66]、多布森模型(Dobson model)[75]和修正的残差克里金模型[76]等模型. ...
A simplified sub-surface soil salinity estimation using synergy of Sentinel-1 SAR and Sentinel-2 multispectral satellite data,for early stages of wheat crop growth in Rupnagar,Punjab,India
2
2021
... 除上述模型外一些新型模型与改进模型也被用于遥感监测模型的构建,如逐步多元回归(stepwise multiple regression analysis,SMR)模型[17,35,64]、岭回归模型(ridge regression,RR)模型[65-66]、普通最小二乘法(ordinary least square,OLS)[67-68]、空间自回归(spatial autore gression,SAR)模型[56]、决策树算法(decision tree algorithm,DTA)[67]、支持向量回归(support vector regression,SVR)模型[12,25,69]、粒子群优化支持向量机(particle swarm optimization support vector machine,PSO-SVM)模型[15,70]、网格搜索支持向量机(grid search support vector machine, GS-SVM)[71]、差分进化支持向量机(differential evolution support vector machine,DE-SVM)模型 [15]、卷积神经网络(convolutional neural network,CNN)模型[70]、多元自适应回归样条(multivariate adaptive regression spline,MARS)模型[1,25,72]、人工神经网络(artificial neural network,ANN)模型[7,26]、Bootstrap-BP神经网络模型[43]、极限学习机(extra learning machine,ELM)[61,73]、结构方程模型[74](structural equation model,SEM)、溶质运移模型[28]、地理加权回归(geographically weighted regression,GWR)模型[24,66]、多布森模型(Dobson model)[75]和修正的残差克里金模型[76]等模型. ...
... [67]、支持向量回归(support vector regression,SVR)模型[12,25,69]、粒子群优化支持向量机(particle swarm optimization support vector machine,PSO-SVM)模型[15,70]、网格搜索支持向量机(grid search support vector machine, GS-SVM)[71]、差分进化支持向量机(differential evolution support vector machine,DE-SVM)模型 [15]、卷积神经网络(convolutional neural network,CNN)模型[70]、多元自适应回归样条(multivariate adaptive regression spline,MARS)模型[1,25,72]、人工神经网络(artificial neural network,ANN)模型[7,26]、Bootstrap-BP神经网络模型[43]、极限学习机(extra learning machine,ELM)[61,73]、结构方程模型[74](structural equation model,SEM)、溶质运移模型[28]、地理加权回归(geographically weighted regression,GWR)模型[24,66]、多布森模型(Dobson model)[75]和修正的残差克里金模型[76]等模型. ...
Comparative regional-scale soil salinity assessment with near-ground apparent electrical conductivity and remote sensing canopy reflectance
1
2016
... 除上述模型外一些新型模型与改进模型也被用于遥感监测模型的构建,如逐步多元回归(stepwise multiple regression analysis,SMR)模型[17,35,64]、岭回归模型(ridge regression,RR)模型[65-66]、普通最小二乘法(ordinary least square,OLS)[67-68]、空间自回归(spatial autore gression,SAR)模型[56]、决策树算法(decision tree algorithm,DTA)[67]、支持向量回归(support vector regression,SVR)模型[12,25,69]、粒子群优化支持向量机(particle swarm optimization support vector machine,PSO-SVM)模型[15,70]、网格搜索支持向量机(grid search support vector machine, GS-SVM)[71]、差分进化支持向量机(differential evolution support vector machine,DE-SVM)模型 [15]、卷积神经网络(convolutional neural network,CNN)模型[70]、多元自适应回归样条(multivariate adaptive regression spline,MARS)模型[1,25,72]、人工神经网络(artificial neural network,ANN)模型[7,26]、Bootstrap-BP神经网络模型[43]、极限学习机(extra learning machine,ELM)[61,73]、结构方程模型[74](structural equation model,SEM)、溶质运移模型[28]、地理加权回归(geographically weighted regression,GWR)模型[24,66]、多布森模型(Dobson model)[75]和修正的残差克里金模型[76]等模型. ...
Predicting and mapping of soil salinity using machine learning algorithms in central arid regions of Iran
1
2020
... 除上述模型外一些新型模型与改进模型也被用于遥感监测模型的构建,如逐步多元回归(stepwise multiple regression analysis,SMR)模型[17,35,64]、岭回归模型(ridge regression,RR)模型[65-66]、普通最小二乘法(ordinary least square,OLS)[67-68]、空间自回归(spatial autore gression,SAR)模型[56]、决策树算法(decision tree algorithm,DTA)[67]、支持向量回归(support vector regression,SVR)模型[12,25,69]、粒子群优化支持向量机(particle swarm optimization support vector machine,PSO-SVM)模型[15,70]、网格搜索支持向量机(grid search support vector machine, GS-SVM)[71]、差分进化支持向量机(differential evolution support vector machine,DE-SVM)模型 [15]、卷积神经网络(convolutional neural network,CNN)模型[70]、多元自适应回归样条(multivariate adaptive regression spline,MARS)模型[1,25,72]、人工神经网络(artificial neural network,ANN)模型[7,26]、Bootstrap-BP神经网络模型[43]、极限学习机(extra learning machine,ELM)[61,73]、结构方程模型[74](structural equation model,SEM)、溶质运移模型[28]、地理加权回归(geographically weighted regression,GWR)模型[24,66]、多布森模型(Dobson model)[75]和修正的残差克里金模型[76]等模型. ...
Estimation of soil salt content using machine learning techniques based on remote-sensing fractional derivatives:A case study in the Ebinur Lake Wetland National Nature Reserve,Northwest China
2
2020
... 除上述模型外一些新型模型与改进模型也被用于遥感监测模型的构建,如逐步多元回归(stepwise multiple regression analysis,SMR)模型[17,35,64]、岭回归模型(ridge regression,RR)模型[65-66]、普通最小二乘法(ordinary least square,OLS)[67-68]、空间自回归(spatial autore gression,SAR)模型[56]、决策树算法(decision tree algorithm,DTA)[67]、支持向量回归(support vector regression,SVR)模型[12,25,69]、粒子群优化支持向量机(particle swarm optimization support vector machine,PSO-SVM)模型[15,70]、网格搜索支持向量机(grid search support vector machine, GS-SVM)[71]、差分进化支持向量机(differential evolution support vector machine,DE-SVM)模型 [15]、卷积神经网络(convolutional neural network,CNN)模型[70]、多元自适应回归样条(multivariate adaptive regression spline,MARS)模型[1,25,72]、人工神经网络(artificial neural network,ANN)模型[7,26]、Bootstrap-BP神经网络模型[43]、极限学习机(extra learning machine,ELM)[61,73]、结构方程模型[74](structural equation model,SEM)、溶质运移模型[28]、地理加权回归(geographically weighted regression,GWR)模型[24,66]、多布森模型(Dobson model)[75]和修正的残差克里金模型[76]等模型. ...
... [70]、多元自适应回归样条(multivariate adaptive regression spline,MARS)模型[1,25,72]、人工神经网络(artificial neural network,ANN)模型[7,26]、Bootstrap-BP神经网络模型[43]、极限学习机(extra learning machine,ELM)[61,73]、结构方程模型[74](structural equation model,SEM)、溶质运移模型[28]、地理加权回归(geographically weighted regression,GWR)模型[24,66]、多布森模型(Dobson model)[75]和修正的残差克里金模型[76]等模型. ...
Extracting soil salinization information with a fractional-order filtering algorithm and grid-search support vector machine (GS-SVM) model
1
2020
... 除上述模型外一些新型模型与改进模型也被用于遥感监测模型的构建,如逐步多元回归(stepwise multiple regression analysis,SMR)模型[17,35,64]、岭回归模型(ridge regression,RR)模型[65-66]、普通最小二乘法(ordinary least square,OLS)[67-68]、空间自回归(spatial autore gression,SAR)模型[56]、决策树算法(decision tree algorithm,DTA)[67]、支持向量回归(support vector regression,SVR)模型[12,25,69]、粒子群优化支持向量机(particle swarm optimization support vector machine,PSO-SVM)模型[15,70]、网格搜索支持向量机(grid search support vector machine, GS-SVM)[71]、差分进化支持向量机(differential evolution support vector machine,DE-SVM)模型 [15]、卷积神经网络(convolutional neural network,CNN)模型[70]、多元自适应回归样条(multivariate adaptive regression spline,MARS)模型[1,25,72]、人工神经网络(artificial neural network,ANN)模型[7,26]、Bootstrap-BP神经网络模型[43]、极限学习机(extra learning machine,ELM)[61,73]、结构方程模型[74](structural equation model,SEM)、溶质运移模型[28]、地理加权回归(geographically weighted regression,GWR)模型[24,66]、多布森模型(Dobson model)[75]和修正的残差克里金模型[76]等模型. ...
Method for predicting soil salinity concentrations in croplands based on machine learning and remote sensing techniques
1
2019
... 除上述模型外一些新型模型与改进模型也被用于遥感监测模型的构建,如逐步多元回归(stepwise multiple regression analysis,SMR)模型[17,35,64]、岭回归模型(ridge regression,RR)模型[65-66]、普通最小二乘法(ordinary least square,OLS)[67-68]、空间自回归(spatial autore gression,SAR)模型[56]、决策树算法(decision tree algorithm,DTA)[67]、支持向量回归(support vector regression,SVR)模型[12,25,69]、粒子群优化支持向量机(particle swarm optimization support vector machine,PSO-SVM)模型[15,70]、网格搜索支持向量机(grid search support vector machine, GS-SVM)[71]、差分进化支持向量机(differential evolution support vector machine,DE-SVM)模型 [15]、卷积神经网络(convolutional neural network,CNN)模型[70]、多元自适应回归样条(multivariate adaptive regression spline,MARS)模型[1,25,72]、人工神经网络(artificial neural network,ANN)模型[7,26]、Bootstrap-BP神经网络模型[43]、极限学习机(extra learning machine,ELM)[61,73]、结构方程模型[74](structural equation model,SEM)、溶质运移模型[28]、地理加权回归(geographically weighted regression,GWR)模型[24,66]、多布森模型(Dobson model)[75]和修正的残差克里金模型[76]等模型. ...
Remote sensing inversion of saline and Alkaline Land based on an improved seagull optimization algorithm and the two-hidden-layer extreme learning machine
1
2021
... 除上述模型外一些新型模型与改进模型也被用于遥感监测模型的构建,如逐步多元回归(stepwise multiple regression analysis,SMR)模型[17,35,64]、岭回归模型(ridge regression,RR)模型[65-66]、普通最小二乘法(ordinary least square,OLS)[67-68]、空间自回归(spatial autore gression,SAR)模型[56]、决策树算法(decision tree algorithm,DTA)[67]、支持向量回归(support vector regression,SVR)模型[12,25,69]、粒子群优化支持向量机(particle swarm optimization support vector machine,PSO-SVM)模型[15,70]、网格搜索支持向量机(grid search support vector machine, GS-SVM)[71]、差分进化支持向量机(differential evolution support vector machine,DE-SVM)模型 [15]、卷积神经网络(convolutional neural network,CNN)模型[70]、多元自适应回归样条(multivariate adaptive regression spline,MARS)模型[1,25,72]、人工神经网络(artificial neural network,ANN)模型[7,26]、Bootstrap-BP神经网络模型[43]、极限学习机(extra learning machine,ELM)[61,73]、结构方程模型[74](structural equation model,SEM)、溶质运移模型[28]、地理加权回归(geographically weighted regression,GWR)模型[24,66]、多布森模型(Dobson model)[75]和修正的残差克里金模型[76]等模型. ...
Can subsurface soil salinity be predicted from surface spectral information? From the perspective of structural equation modelling
1
2016
... 除上述模型外一些新型模型与改进模型也被用于遥感监测模型的构建,如逐步多元回归(stepwise multiple regression analysis,SMR)模型[17,35,64]、岭回归模型(ridge regression,RR)模型[65-66]、普通最小二乘法(ordinary least square,OLS)[67-68]、空间自回归(spatial autore gression,SAR)模型[56]、决策树算法(decision tree algorithm,DTA)[67]、支持向量回归(support vector regression,SVR)模型[12,25,69]、粒子群优化支持向量机(particle swarm optimization support vector machine,PSO-SVM)模型[15,70]、网格搜索支持向量机(grid search support vector machine, GS-SVM)[71]、差分进化支持向量机(differential evolution support vector machine,DE-SVM)模型 [15]、卷积神经网络(convolutional neural network,CNN)模型[70]、多元自适应回归样条(multivariate adaptive regression spline,MARS)模型[1,25,72]、人工神经网络(artificial neural network,ANN)模型[7,26]、Bootstrap-BP神经网络模型[43]、极限学习机(extra learning machine,ELM)[61,73]、结构方程模型[74](structural equation model,SEM)、溶质运移模型[28]、地理加权回归(geographically weighted regression,GWR)模型[24,66]、多布森模型(Dobson model)[75]和修正的残差克里金模型[76]等模型. ...
Dielectric properties of saline soils and an improved dielectric model in C-band
1
2015
... 除上述模型外一些新型模型与改进模型也被用于遥感监测模型的构建,如逐步多元回归(stepwise multiple regression analysis,SMR)模型[17,35,64]、岭回归模型(ridge regression,RR)模型[65-66]、普通最小二乘法(ordinary least square,OLS)[67-68]、空间自回归(spatial autore gression,SAR)模型[56]、决策树算法(decision tree algorithm,DTA)[67]、支持向量回归(support vector regression,SVR)模型[12,25,69]、粒子群优化支持向量机(particle swarm optimization support vector machine,PSO-SVM)模型[15,70]、网格搜索支持向量机(grid search support vector machine, GS-SVM)[71]、差分进化支持向量机(differential evolution support vector machine,DE-SVM)模型 [15]、卷积神经网络(convolutional neural network,CNN)模型[70]、多元自适应回归样条(multivariate adaptive regression spline,MARS)模型[1,25,72]、人工神经网络(artificial neural network,ANN)模型[7,26]、Bootstrap-BP神经网络模型[43]、极限学习机(extra learning machine,ELM)[61,73]、结构方程模型[74](structural equation model,SEM)、溶质运移模型[28]、地理加权回归(geographically weighted regression,GWR)模型[24,66]、多布森模型(Dobson model)[75]和修正的残差克里金模型[76]等模型. ...
Detecting soil salinity in alfalfa fields using spatial modeling and remote sensing
1
2008
... 除上述模型外一些新型模型与改进模型也被用于遥感监测模型的构建,如逐步多元回归(stepwise multiple regression analysis,SMR)模型[17,35,64]、岭回归模型(ridge regression,RR)模型[65-66]、普通最小二乘法(ordinary least square,OLS)[67-68]、空间自回归(spatial autore gression,SAR)模型[56]、决策树算法(decision tree algorithm,DTA)[67]、支持向量回归(support vector regression,SVR)模型[12,25,69]、粒子群优化支持向量机(particle swarm optimization support vector machine,PSO-SVM)模型[15,70]、网格搜索支持向量机(grid search support vector machine, GS-SVM)[71]、差分进化支持向量机(differential evolution support vector machine,DE-SVM)模型 [15]、卷积神经网络(convolutional neural network,CNN)模型[70]、多元自适应回归样条(multivariate adaptive regression spline,MARS)模型[1,25,72]、人工神经网络(artificial neural network,ANN)模型[7,26]、Bootstrap-BP神经网络模型[43]、极限学习机(extra learning machine,ELM)[61,73]、结构方程模型[74](structural equation model,SEM)、溶质运移模型[28]、地理加权回归(geographically weighted regression,GWR)模型[24,66]、多布森模型(Dobson model)[75]和修正的残差克里金模型[76]等模型. ...
基于三维光谱特征空间的干旱区土壤盐渍化遥感定量研究
1
2013
... 基于光谱特征空间的方法也可以建立土壤遥感监测模型[77-78],通过建立影响土壤盐渍化参量的二维或三维空间,可用特征空间中到某一特征点的距离反映盐度,不同区域反映不同程度土壤盐渍化[79],确定不同参量之间的相互变化趋势,结合实际经验对散点空间图进行分析,利用散点图的空间特征参量建立相应模型. ...
基于三维光谱特征空间的干旱区土壤盐渍化遥感定量研究
1
2013
... 基于光谱特征空间的方法也可以建立土壤遥感监测模型[77-78],通过建立影响土壤盐渍化参量的二维或三维空间,可用特征空间中到某一特征点的距离反映盐度,不同区域反映不同程度土壤盐渍化[79],确定不同参量之间的相互变化趋势,结合实际经验对散点空间图进行分析,利用散点图的空间特征参量建立相应模型. ...
基于三维特征空间的土壤盐渍化遥感模型
1
2015
... 基于光谱特征空间的方法也可以建立土壤遥感监测模型[77-78],通过建立影响土壤盐渍化参量的二维或三维空间,可用特征空间中到某一特征点的距离反映盐度,不同区域反映不同程度土壤盐渍化[79],确定不同参量之间的相互变化趋势,结合实际经验对散点空间图进行分析,利用散点图的空间特征参量建立相应模型. ...
基于三维特征空间的土壤盐渍化遥感模型
1
2015
... 基于光谱特征空间的方法也可以建立土壤遥感监测模型[77-78],通过建立影响土壤盐渍化参量的二维或三维空间,可用特征空间中到某一特征点的距离反映盐度,不同区域反映不同程度土壤盐渍化[79],确定不同参量之间的相互变化趋势,结合实际经验对散点空间图进行分析,利用散点图的空间特征参量建立相应模型. ...
A model for the rapid monitoring of soil salinization in the Yellow River Delta using Landsat8 OLI imagery based on VI-SI feature space
1
2019
... 基于光谱特征空间的方法也可以建立土壤遥感监测模型[77-78],通过建立影响土壤盐渍化参量的二维或三维空间,可用特征空间中到某一特征点的距离反映盐度,不同区域反映不同程度土壤盐渍化[79],确定不同参量之间的相互变化趋势,结合实际经验对散点空间图进行分析,利用散点图的空间特征参量建立相应模型. ...


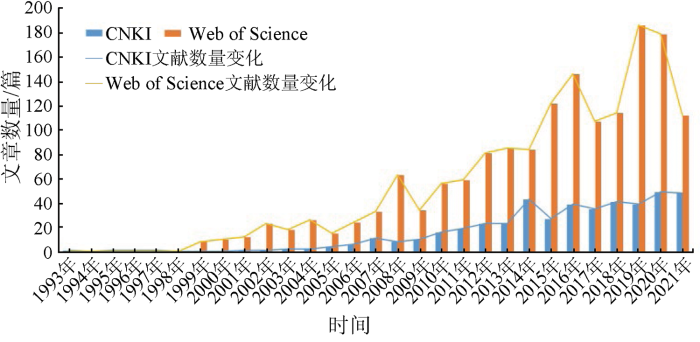


{kind=link}
{kind=link}