

0 引言
应用卫星遥感技术进行对地观测的过程中,受到大气环境、天气变化的影响,获取的卫星影像往往存在云层遮挡问题。国际卫星云气候计划ISCCP(International Satellite Cloud Climatology Project)的研究结果显示,全球60%以上的地球表面都被云层覆盖[1]。而且,云检测技术对于大气纠正、植被指数计算、地表覆盖分类和变化检测具有重要意义,未被标记的云像元将会给地面和大气参数的反演带来极大的阻碍。因此,有必要对云检测相关技术进行研究。
当前,根据基础理论与研究方法的不同,可以将云检测方法分为2类[2⇓-4]: 基于物理特征的经验规则算法和基于机器学习的算法。基于物理特征的经验规则算法以像元光谱特征为参考,通过分析云目标和典型地表之间的光谱差异,利用先验物理模型确定分类阈值或规则。Coluzzi等[5]对云目标与背景环境之间的物理性质和光谱差异进行了研究,并基于分层分类思想,通过多次阈值划分对云目标进行检测; Hagolle等[6]提出了一种多时相云检测方法,由于随着时间变化,背景地物在蓝光波段上的反射率变化不明显,而受到云层遮挡的像元在蓝光波段的反射率变化更加明显,研究者便能够借助简单的阈值分割法基于不同像元在一定时间长度内的反射率变化幅度对云目标进行检测。由于此类算法原理简单,计算速度快,在各类遥感应用中得到广泛应用,比如应用于Sentinel-2的Sen2Cor算法[7]和应用于Landsat系列和Sentinel-2的Fmask算法[8]。然而,此类算法往往针对于特定传感器或特定波段设计,对于不同背景环境下云目标的检测稳定性较差。彭龙康等[4]经过研究发现,在面对不同地物背景和不同影像分辨率时,Fmask算法的稳定性较差,为获得较理想的云检测效果,往往需要对算法进行较大的调整和重新设计。
基于机器学习的算法利用监督分类算法,将云检测视为二类分类问题。以训练数据集为基础训练得到特定分类模型,使得不同类数据区分度最大且分类误差最小,进而用于云目标检测。Fu等[9]结合FY-2G云检测产品,提出一种借助集成学习方法选取分类特征,再借助随机森林(random forest, RF)方法训练分类模型的云检测方法,在原有产品基础上进一步提高了云检测精度; 栗旭升等[10]通过结合云目标的光谱特征和纹理特征,基于支持向量机(support vector machine, SVM)模型实现了对不同种类云目标的检测。由于机器学习方法对于训练样本十分依赖,这使得训练得到的分类模型往往容易过拟合[11],从而带来在不同背景环境下对云目标的检测稳定性差的问题。因此,有必要对基于机器学习的云检测方法在不同背景环境下进行云检测的稳定性进行评价。
当前,已有学者基于Sentinel-2数据在云检测领域的应用进行了研究,Cilli等[12]对各类机器学习云检测算法在Sentinel-2数据上的应用效果进行了对比分析,研究结果表明基于RF方法的云检测模型具有最高的稳定性,但没有对Sentinel-2数据的波谱特征进行研究; 王明等[13]基于阈值分割方法对Sentinel-2影像中6个单一波段/产品的云检测潜力进行了评价,但没有提出可用于真实环境的云检测方法; 余长慧等[14]通过预处理的Sentinel-2样本数据构建出深度神经网络模型,自动提取高层次影像特征,输入分类器,最终实现影像的像素级分类,进而获得云覆盖区域,但没有对不同背景环境和云目标种类对云检测精度的影响进行更深入探究。
针对于上述需求和存在的问题,本文利用Sentinel-2A数据,基于多特征分类思想,将薄云最优变换(Haze optimized transformation,HOT)和云位移指数(cloud displacement index,CDI)指数引入RF模型,并从背景环境和云目标种类对云检测精度的影响出发,对本文方法在不同背景环境下的云检测精度和稳定性进行了评价。
1 研究数据
1.1 数据概况
表1 Sentinel-2A卫星波段
Tab.1
| 波段 | 空间分 辨率/m | 中心波 长/nm | 波段范 围/nm |
|---|---|---|---|
| B1 - Coastal aerosol | 60 | 443.9 | 20 |
| B2 - Blue | 10 | 496.6 | 65 |
| B3 - Green | 10 | 560.0 | 35 |
| B4 - Red | 10 | 664.5 | 30 |
| B5 - Vegetation Red Edge | 20 | 703.9 | 15 |
| B6 - Vegetation Red Edge | 20 | 740.2 | 15 |
| B7 - Vegetation Red Edge | 20 | 782.5 | 20 |
| B8 - NIR | 10 | 835.1 | 115 |
| B8a - Narrow NIR | 20 | 864.8 | 20 |
| B9 - Water vapor | 60 | 945.0 | 20 |
| B10 - SWIR-Cirrus | 60 | 1 373.5 | 30 |
| B11 - SWIR | 20 | 1 613.7 | 90 |
| B12 - SWIR | 20 | 2 202.4 | 180 |
表2 样本数据
Tab.2
| 序号 | 成像时间 | UTM分区 | 背景环境 |
|---|---|---|---|
| 1 | 2020-12-18 | T33TVF | 林地/农用地/城市/冰雪 |
| 2 | 2020-02-27 | T18TYL | 水面/城市/林地 |
| 3 | 2019-12-30 | T32TQR | 林地/农用地/城市/水面 |
| 4 | 2019-12-10 | T32SNE | 荒漠 |
| 5 | 2020-08-13 | T34VCJ | 林地/农用地/城市 |
| 6 | 2020-12-13 | T31TDF | 城市/水面 |
| 7 | 2020-08-07 | T33TXF | 农用地/裸地 |
1.2 影像预处理与样本集构建
由于云检测方法的直接操作对象为像元的大气顶(top of atmosphere,TOA)反射率,而Sentinel-2A卫星的L1C级数据为经过正射校正和几何精纠正的TOA反射率产品,因此不需要额外对影像进行辐射定标和大气校正。为同Fmask算法进行对比分析,将Sentinel-2数据重采样为20 m空间分辨率。分别采用均值法和最近邻法对10 m空间分辨率数据(B2,B3,B4,B8)和60 m空间分辨率数据(B1,B9,B10)重采样,并分别计算HOT和CDI。在此基础上,基于单幅Sentinel-2A遥感影像构建样本集,利用ENVI5.3软件,通过目视判别选定训练样本,选取标准如2.2.1节所述。单一样本大小为32像素×32像素(20 m空间分辨率),每一景影像选取约100个云样本和50个地表样本。样本特征包括13个Sentinel-2已有波段、HOT及CDI,共15个特征。最终选取816个云样本,510个地表样本,共1 326个样本。
2 研究方法
2.1 技术路线
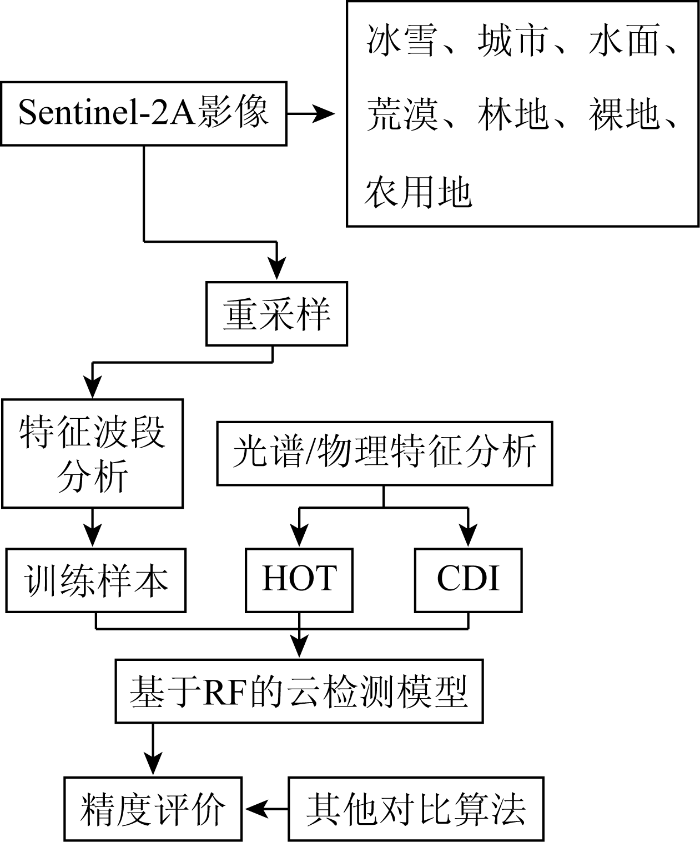
技术路线如图1所示,首先对云目标与背景环境的光谱特征差异进行分析,通过选择特征波段组合辅助训练样本的选择提高样本代表性,同时引入HOT,基于光谱和物理特征对云目标和背景环境进行区分。针对Sentinel-2数据缺乏热红外波段的问题,引入CDI提高对冰雪和高反射率建筑物等地物的区分效果。最后基于RF训练得到云检测模型,并与Fmask,s2cloudless和原始RF等其他云检测算法进行对比分析,其中原始RF算法基于Sentinel-2影像既有的13个波段进行运算。
图1
2.2 影像特征分析
云层是由大气中的水滴、冰晶或二者混合物组成的具有一定几何形状和层次分布的悬浮体。根据云目标在可见光波段的透过性及相对地面的高度,本研究将云目标分为主要分布于中低空、透过性差乃至于不透的层云、积云(下文统称层/积云)和主要分布于高空、透过性强的卷云2类,如图2所示。
图2

2.2.1 影像光谱特征
手动选取典型地物与典型云目标的5像素×5像素大小的样本数据,每类选取5个样本,各波段同类样本反射率取均值,地物类型包含冰雪、城市、水面、荒漠、林地、农用地、裸地7类,云目标类型包含层/积云、陆地上卷云和水上卷云3类,如图3所示。
图3

图3
典型云目标与典型地物TOA反射率
Fig.3
TOA reflectance of typical cloud objects and land cover types
由图3可见,透过性较差的层/积云在可见光/近红外波段(400~1 000 nm),表现出与除冰雪外的其他6类地物的明显差异,可以利用该区间内的波段信息在影像上对层/积云与地物进行区分。因此,本文使用真彩色影像(RGB通道分别为B4,B3,B2)采集层/积云样本数据。对于冰/雪环境下的层/积云目标,则在真彩色影像的基础上,采用基于B2,B11,B12的假彩色影像对冰/雪进行区分。对于卷云而言,由于自身较强的透过性,其与被覆盖地物的光谱特征表现出较高的相似性,不易区分。但卷云在B10波段表现出相对其他地物更高的反射率[15],如图4所示。因此,在基于真彩色影像采集卷云样本的同时,参考B10波段的灰度图对样本选择结果进行修正。
图4

图4
典型云目标与典型地物B10波段TOA反射率
Fig.4
TOA reflectance of typical cloud objects and land cover types in B10
2.2.2 HOT
式中: B2和B4分别为蓝光(B2)和红光(B4)波段的像元TOA反射率; IHOT为HOT值。
2.2.3 CDI
由于Sentinel-2系列卫星缺乏热红外波段,无法利用在剔除冰雪和城市等易与云层混淆的背景地物中发挥了重要作用[8,18]的热红外波段信息。针对该问题,Frantz 等[19]提出了一种基于相邻近红外波段间显著视差效应的Sentinel-2云检测指数CDI。CDI不仅依赖于Sentinel-2影像自身的光谱信息,而且还考虑了Sentinel-2影像成像过程中近红外波段间的几何关系,基于视差效应,通过对地表以上物体进行水平方向上的位移,实现其空间位置的重新配准。通过这种方式,有效弥补了Sentinel-2影像缺少热红外波段的缺陷,并且相较于依赖单一波段(B10)的卷云检测方法具备更好的检测效果。计算公式为:
式中: B7,B8,B8a分别为B7,B8,B8a波段的TOA反射率; R8,8a,R7,8a分别为B8,B8a和B7,B8a波段反射率之比; V8,8a,V7,8a分别为7像素×7像素大小的窗口内所有相应R值的方差,计算结果值赋给中心像元; ICDI为CDI值。
2.3 RF分类器构建
2.4 精度评价方法
为了对本文方法的云检测精度与稳定性进行评价,选取不同时间、地域的5景Sentinel-2A影像进行测试(表3)。首先利用训练得到的云检测模型对其进行检测,在得到每景影像的云检测结果后,利用ArcGIS软件在每景影像结果上随机生成500个精度验证点,采用人工判别的方式,判定每个精度验证点的真实类别并参与最后的精度评价。
表3 测试数据
Tab.3
| 序号 | 成像时间 | UTM分区 | 背景环境 |
|---|---|---|---|
| 1 | 2021-06-05 | T40SDH | 荒漠/农用地 |
| 2 | 2021-06-05 | T40XEH | 水面/冰雪 |
| 3 | 2021-06-06 | T49SGC | 林地/农用地/城市/裸地 |
| 4 | 2021-06-06 | T54TVM | 城市/水面 |
| 5 | 2021-06-06 | T55VFJ | 冰雪/林地 |
本研究选取查准率、查全率、总体精度和F1分数作为衡量指标,各指标公式分别为:
式中: P,S,OA和F1分别为查准率、查全率、总体精度和F1分数; TP为准确识别的云样点数; TN为准确识别的非云样点数; FP为误识别的云样点数; FN为误识别的非云样点数。查准率P为准确识别的云样点数与所有被识别的云样点数之比; 查全率S为准确识别的云样点数与所有云样点数之比; 总体精度OA为准确识别的样点数与所有样点数之比; F1分数为查准率和查全率的调和平均数,能够通过规避极端情况,得出更合理的评价结果。
3 实验结果与分析
3.1 云检测精度评价
实验结果如表4、图5所示。由表4可知,本文方法的总体精度和F1分数均值分别为92.6%和0.931,标准差分别为0.019和0.014,相对Fmask总体精度和F1分数分别提升2.2%和2.9%,标准差分别降低29.6%和72.5%,说明本文方法在保持高检测精度的同时,能够显著提高不同背景环境下云检测的稳定性。此外,本文方法的查准率为0.886,持平于Fmask算法(0.894),查全率为0.983,显著高于Fmask(0.926)。相近的查准率表明本文方法与Fmask算法对云目标和背景地物的区分能力相似。然而,得益于明显提升的查全率,本文方法可以识别更多种类的云目标,能够适用于更多种类的云目标检测任务。相较于仅利用Sentinel-2既有13个波段的原始RF方法,本文方法通过引入CDI和HOT指标,提高了对特定种类云目标的检测能力,具备更大的适用范围,但原始RF方法能更好地区分云目标和背景环境,说明本文方法虽然能够识别更多种类的云目标,但受更复杂的背景环境影响,出现了更多的误分现象。

图5
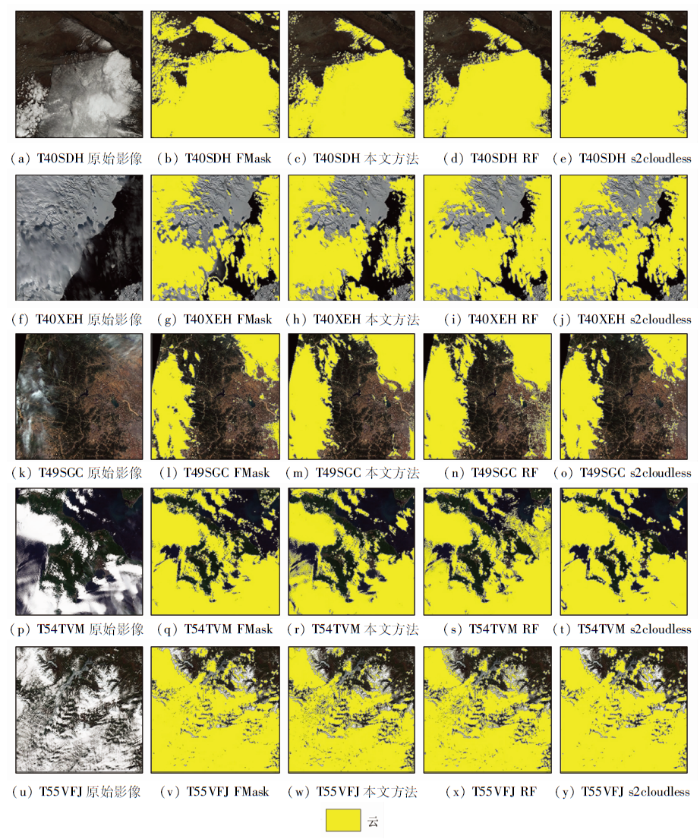
总体而言,本文方法的云检测效果最好。原始RF方法的总体检测效果与本文方法接近,在检测精度和云目标检测适用范围上互有优劣。Fmask 4.3算法弱于本文方法和原始RF方法,但优于s2cloudless算法。
3.2 背景环境对云检测结果的影响
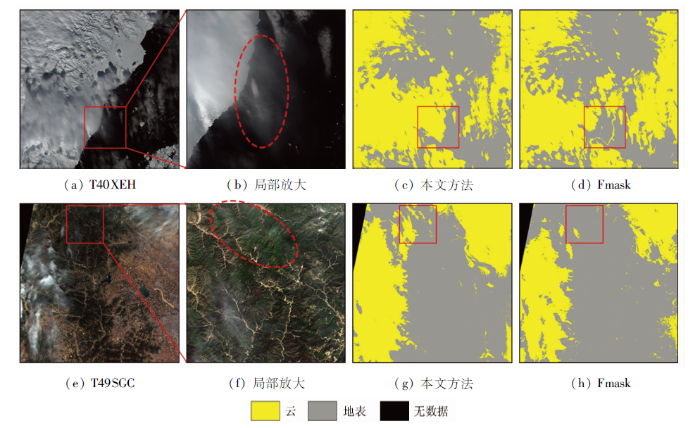
在已有的云检测相关研究中,研究者发现根据应用环境的不同,主要有3类地物容易与云目标混淆,分别为荒漠、城市建成区和冰雪[5,22⇓ -24]。图6所示区域位于科佩特山脉北部,属于典型的荒漠环境,图6(b)红色椭圆内所示区域为典型的高反射率地物,在可见光/近红外波段,其反射率明显高于周边其他地物。图6(c)—(d)的分类结果表明,Fmask算法对此类地物的区分能力较差,更倾向于将此类地物误分为云目标; 相对而言,本文提出的方法能够准确识别高反射率荒漠地表与云目标之间的差异,进而对二者进行区分。在城市范围内进行云检测的过程中,建成区内广泛分布的高反射率明亮地物往往会对云目标的检测造成阻碍(图7(a))。图7(b)红色椭圆内区域为典型的城市建成区,其中包含大量的机场跑道、水泥路面和建筑物屋顶等地物。如图7(e)所示,Fmask算法将该区域误识别为云目标。而且由该区域B10波段影像可见(图7(c),为加强展示效果人为提高了该影像的亮度),该区域右下角包含一条南北向的长条状卷云分布带。对比图7(d)—(e),本文方法对该区域云目标有较好的识别效果,而Fmask算法几乎没有识别出该区域和研究区左下角特征相对明显的云目标。图8(a)为典型的冰雪环境,如图8(b)所示,研究区红色椭圆范围内为上空覆盖高空卷云的雪地,由于云层较薄,从可见光波段很难将二者区分开。然而,基于B10波段(图8(c),为加强展示效果提高了该影像的亮度),可以明显的看出,红色椭圆范围内存在云目标的分布。由云检测结果(图8(d)—(e))可知,本文方法在冰雪环境下相较于Fmask算法具备更强的检测能力。
图6

图7
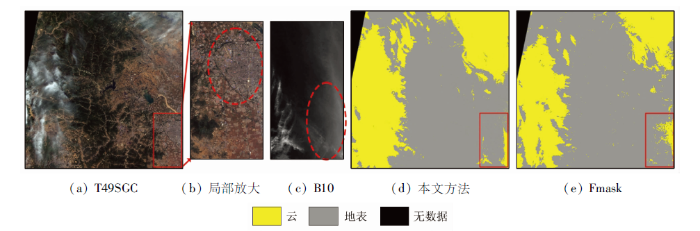
图8
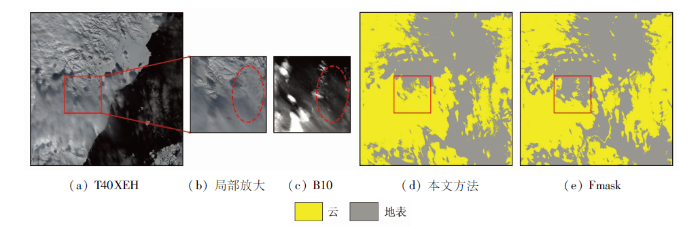
总体而言,在区分云目标与背景地物的过程中,本文方法的误分率更低,更不容易将背景地物错误地识别为云目标。Fmask算法倾向于将荒漠和城市建成区误分为云目标,在冰雪环境下则倾向于漏分具备较高透过率的高空卷云。本文方法在这3类背景环境下的云检测效果均优于Fmask算法。
3.3 不同种类云目标对云检测结果的影响
受到形成环境和组成成分的影响,云目标类别多种多样,并各自具备独特的物理和光谱特征。单一云检测方法难以具备对所有类型云目标的检测能力。因此,有必要从适用范围出发对云检测方法进行评价。由于层/积云透过率较低,除边缘的薄云(下文统称低空薄云)以外受地物影响小,光谱特征相对于背景地物差别较大,容易进行区分,故主要研究高空卷云和低空薄云对检测结果的影响。
高空卷云主要由薄的非球形冰晶组成,大都在可见光波段表现出半透明的特点[5]。结合图3的训练样本统计结果,在本文研究区内,以城市建成区为例,无卷云覆盖的建成区范围内像元的TOA反射率相对于同地区有卷云覆盖的相邻同类建成区像元高出10%左右,但总体光谱变化趋势不变。受到上述因素的影响,卷云与背景地物的区分一直是相关研究中的难点[25](图9)。如图9(b),(d),(f),(h)所示,Fmask算法对部分具有高透过率的高空卷云的检测能力存在不足,特别是山地环境下的高空卷云(图9(f))。如影像(图9(f)和(h))所示,Fmask算法无法有效检测该区域内的薄云; 相对应的,本文方法能够有效检测该区域的薄云目标,说明本文方法在山地区域的检测效果优于Fmask算法。因此,在对高空卷云的检测上,本文方法的表现优于Fmask算法。
图9
在低空层/积云形成的过程中,其边缘会存在少量厚度薄、透过率高、半透明的薄云(图10(a)和(b)红色椭圆所示区域)。与卷云类似,由于此类云目标的高度较低,在B10波段难以将其与背景环境进行区分。然而,由于本文方法在对高空卷云和低层薄云此类具备高透过率的云目标进行区分的时侯高度依赖B10波段,所以当B10波段无法对此类云目标和背景环境进行区分(图10(c))时,本文方法的检测效果将会明显变差。虽然如图10(d)所示,视觉效果上,CDI能够有效地提取低空薄云(图10(b)红色椭圆处),但从整体表现上看,CDI倾向于将云目标附近非云像元误分为云像元(图10(d)红色椭圆处),从而扩大了检测得到的云目标范围。因此,如何利用CDI有效提取低空薄云仍需要进一步研究。
图10

4 结论与讨论
本研究利用Sentinel-2A影像数据构建训练数据集和测试数据集,训练得到基于RF的Sentinel-2云检测模型,并对其在不同环境下的检测精度、稳定性和适用范围进行了探究。结论如下:
1) 检测精度上,本文方法相对于Fmask算法具有更高的总体精度和F1分数,说明本文方法的检测精度优于Fmask算法。
2) 稳定性上,本文方法各项指标的标准差均低于Fmask算法,其中总体精度和F1分数的标准差相较于Fmask算法分别降低了29.6%和72.5%,说明本文方法在不同环境下的稳定性高于Fmask算法。此外,在荒漠、城市和冰雪等易发生误分、漏分的环境中,本文方法能够有效区分云目标与背景地物,表现优于Fmask算法。
3) 适用范围上,本文方法相对其他对比方法具有最大的适用范围,对大部分云目标种类都具备良好的检测效果,其中对高空卷云的检测效果优于Fmask算法。但本文方法对低空薄云的检测效果较差,容易出现漏分现象。
研究仍存在一些问题,首先是与仅利用Sentinel-2既有13个波段信息的原始RF算法相比,本文方法在引入HOT和CDI指标后,提高了检测结果的查全率,说明引入HOT和CDI指标能够提高云检测方法对卷云等特殊云目标的检测能力。但受限于更加复杂的背景环境,查准率也出现了一定程度的下降,结合图10的相关讨论,说明需要进一步对如何充分利用CDI指标进行探究; 此外,对于山区的云目标检测,本文仅考虑了0~2 000 m海拔环境(表2—3),Qiu等[8]研究表明,当海拔高于3 000 m时,受到更短的光线传递路径影响,背景环境在B10波段的反射率将明显提高,从而对主要基于B10波段的薄云检测造成影响,由于本研究并未考虑高原区域的薄云检测,接下来需要进一步验证本文方法在该区域的适用性。
基于以上结论,本文提出的云检测方法在地表背景复杂多变的环境中具有良好的应用效果,能够在保持不同背景环境下较高云检测精度的同时,具备明显优于Fmask算法的稳定性。在接下来的工作中,需要从提高本文方法对于低空薄云的检测能力和验证检测方法在高海拔山区的适用性入手,进一步扩大云检测方法适用范围,提升其实用性。
参考文献
The international satellite cloud climatology project (ISCCP) web site:An online resource for research
[J].DOI:10.1175/BAMS-85-2-173 URL [本文引用: 1]
A survey of image classification methods and techniques for improving classification performance
[J].DOI:10.1080/01431160600746456 URL [本文引用: 1]
An automatic method for screening clouds and cloud shadows in optical satellite image time series in cloudy regions
[J].DOI:10.1016/j.rse.2018.05.024 URL [本文引用: 1]
遥感影像云检测网络泛化性能研究:以DeepLabv3+为例
[J].
Generalization ability of cloud detection network for satellite imagery based on DeepLabv3+
[J].DOI:10.11834/jrs.20210061 URL [本文引用: 2]
A first assessment of the Sentinel-2 level 1-C cloud mask product to support informed surface analyses
[J].DOI:10.1016/j.rse.2018.08.009 URL [本文引用: 4]
A multi-temporal method for cloud detection,applied to FORMOSAT-2,VENμS,LANDSAT and SENTINEL-2 images
[J].DOI:10.1016/j.rse.2010.03.002 URL [本文引用: 1]
Sen2Cor for Sentinel-2
[C]//
Fmask 4.0:Improved cloud and cloud shadow detection in Landsats4-8 and Sentinel-2 imagery
[J].DOI:10.1016/j.rse.2019.05.024 URL [本文引用: 3]
Cloud detection for FY meteorology satellite based on ensemble thresholds and random forests approach
[J].
DOI:10.3390/rs11010044
URL
[本文引用: 1]

Cloud detection is the first step for the practical processing of meteorology satellite images, and also determines the accuracy of subsequent applications. For Chinese FY serial satellite, the National Meteorological Satellite Center (NSMC) officially provides the cloud detection products. In practical applications, there still are some misdetection regions. Therefore, this paper proposes a cloud detection method trying to improve NSMC’s products based on ensemble threshold and random forest. The binarization is firstly performed using ten threshold methods of the first infrared band and visible channel of the image, and the binarized images are obtained by the voting strategy. Secondly, the binarized images of the two channels are combined to form an ensemble threshold image. Then the middle part of the ensemble threshold image and the upper and lower margins of NSMC’s cloud detection result are used as the sample collection source data for the random forest. Training samples rely only on source image data at one moment, and then the trained random forest model is applied to images of other times to obtain the final cloud detection results. This method performs well on FY-2G images and can effectively detect incorrect areas of the cloud detection products of the NSMC. The accuracy of the algorithm is evaluated by manually labeled ground truth using different methods and objective evaluation indices including Probability of Detection (POD), False Alarm Rate (FAR), Critical Success Index (CSI) and the average and standard deviation of all indices. The accuracy results show that the proposed method performs better than the other methods with less incorrect detection regions. Though the proposed approach is simple enough, it is a useful attempt to improve the cloud detection result, and there is plenty of room for further improvement.
结合图像特征的支持向量机高分一号云检测
[J].
Cloud detection based on support vector machine with image features for GF-1 data
[J].
Development of a support vector machine based cloud detection method for MODIS with the adjustability to various conditions
[J].DOI:10.1016/j.rse.2017.11.003 URL [本文引用: 2]
Machine learning for cloud detection of globally distributed Sentinel-2 images
[J].
DOI:10.3390/rs12152355
URL
[本文引用: 2]
In recent years, a number of different procedures have been proposed for segmentation of remote sensing images, basing on spectral information. Model-based and machine learning strategies have been investigated in several studies. This work presents a comprehensive overview and an unbiased comparison of the most adopted segmentation strategies: Support Vector Machines (SVM), Random Forests, Neural networks, Sen2Cor, FMask and MAJA. We used a training set for learning and two different independent sets for testing. The comparison accounted for 135 images acquired from 54 different worldwide sites. We observed that machine learning segmentations are extremely reliable when the training and test are homogeneous. SVM performed slightly better than other methods. In particular, when using heterogeneous test data, SVM remained the most accurate segmentation method while state-of-the-art model-based methods such as MAJA and FMask obtained better sensitivity and precision, respectively. Therefore, even if each method has its specific advantages and drawbacks, SVM resulted in a competitive option for remote sensing applications.
基于Sentinel-2波段/产品的图像云检测效果对比研究
[J].
Comparsions of image cloud detection effect based on Sentinel-2 bands/products
[J].
神经网络支持下的Sentinel-2卫星影像自动云检测
[J].
DOI:10.13474/j.cnki.11-2246.2019.0248
[本文引用: 1]
为解决利用Sentinel-2卫星影像进行地物信息提取时云层遮挡造成的信息误判问题,提出了一种基于深度学习的遥感影像云区高精度分割方法。该方法通过预处理的遥感样本数据构建出一种深度神经网络模型,自动提取高层次影像特征;再将影像特征输入分类器,实现遥感影像的像素级分类,从而分割出云覆盖矩阵;最后将云覆盖矩阵转化为云二值图,结合感兴趣区矢量准确获取指定区域云检测结果。选取典型区域进行测试,结果表明:该方法检测精度较高,速度较快,且无须辅助信息与人工干预,可用于Sentinel-2卫星影像不规则区域自动云检测。
Automatic cloud detection of Sentinel-2 satellite images based on neural network
[J].
DOI:10.13474/j.cnki.11-2246.2019.0248
[本文引用: 1]
This paper proposed a high accuracy segmentation method of remote sensing image cloud region based on deep learning to overcome the problem of misjudgment of information caused by cloud covering when using sentinel-2 satellite image to extract ground object information. This method constructs a deep neural network model through the preprocessed remote sensing sample data, and automatically extracts high-level image features. Then the image features are input into the classifier to realize the pixelwise classification of remote sensing image, and the cloud coverage matrix is segmented. Finally, the cloud coverage matrix is transformed into a cloud binary map, which is combined with the region of interest to accurately obtain the cloud detection results of the designated region. The method will provide a new idea for automatic cloud detection in irregular region of sentinel-2 satellite images without auxiliary information and human intervention.
Ready-to-use methods for the detection of clouds,cirrus,snow,shadow,water and clear sky pixels in Sentinel-2 MSI images
[J].DOI:10.3390/rs8080666 URL [本文引用: 1]
An image transform to characterize and compensate for spatial variations in thin cloud contamination of Landsat images
[J].DOI:10.1016/S0034-4257(02)00034-2 URL [本文引用: 1]
遥感技术在灰霾监测中的应用综述
[J].
Application review of remote sensing technology in haze monitoring
[J].
Random forests
[J].DOI:10.1023/A:1010933404324 URL [本文引用: 1]
Improvement of the Fmask algorithm for Sentinel-2 images:Separating clouds from bright surfaces based on parallax effects
[J].DOI:10.1016/j.rse.2018.04.046 URL [本文引用: 1]
Scikit-learn:Machine learning in Python
[J].
How many trees in a random forest?
[C]//
Cloud detection for Landsat imagery by combining the random forest and superpixels extracted via energy-driven sampling segmentation approaches
[J].DOI:10.1016/j.rse.2020.112005 URL [本文引用: 1]
An automatic method for screening clouds and cloud shadows in optical satellite image time series in cloudy regions
[J].DOI:10.1016/j.rse.2018.05.024 URL [本文引用: 1]
Cloud detection for night-time panchromatic visible and near-infrared satellite imagery
[J].
Improving Fmask cloud and cloud shadow detection in mountainous area for Landsats4-8 images
[J].DOI:10.1016/j.rse.2017.07.002 URL [本文引用: 1]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}