

0 引言
及时、准确地获取城市土地覆盖信息对于城市土地管理和规划有着重要的作用[1]。自动、高效、高精度的土地覆盖分类是实现上述应用的技术保障。因此,土地覆盖分类方法的研究具有重要的现实意义。
机载多光谱激光雷达(multispectral light detection and ranging,MS-LiDAR)是一种新型的主动遥感系统。该系统配备红外、可见光等多个波段的高分辨率主动成像通道[2]。对比传统的单波段LiDAR,MS-LiDAR可提供更全面、更详细的特征描述,表现在: 具有多个波段的反射强度,反映的目标物理特性更全面; 点云更密集,目标垂直结构细节更丰富。上述多波段反射强度及三维空间位置信息均可用于目标区分,是当前土地覆盖分类研究最理想的数据源。为了提升MS-LiDAR数据在土地覆盖分类及后继城市建模、变化检测、地图更新和灾害评估等领域中的应用价值,现有研究往往侧重于如何充分利用机载MS-LiDAR数据的多光谱及三维空间位置信息。已有的机载MS-LiDAR数据的信息利用方式可归纳为3类: ①独立使用某类信息。如基于高程及其统计特征的陆地/水辨识[3],基于多光谱及其统计特征的土地覆盖分类或水域/土地、植被/建成区辨识[4⇓-6]。该类方法针对不同的分类目的选择某类型的显著性特征,有助于提取所需的信息。但其所用的特征类型单一,忽视了其他类型特征的作用,分类精度较低。②组合使用各类信息。如逐级分离的点云分类法即首先借助基于不规则三角网(triangulated irregular network,TIN)的区域增长滤波算法分离地面和非地面目标; 然后利用归一化植被指数或归一化差异特征指数对二者进一步细分[4,6-7]。该类方法利用了MS-LiDAR点云的多类型特征及空间分布特征,增加了特征利用类型。但是,其将空间和多光谱特征分开加以利用,未能充分发掘各类特征提供的更有效信息,误差传递和累积无法避免,理论上不够严密。③联合使用各类信息。如机器学习的监督分类法。该类方法基于高维特征,利用马氏距离[8]、支持向量机 (support vector machines, SVM) [9⇓⇓⇓⇓-14]、随机森林[15⇓-17]、最大似然[18⇓-20]和决策树分类[21]等浅层机器学习分类器或AlexNet[22]、VGG16[23]、ResNet50[24]、CNN[25]、DBM[26]、自注意胶囊网络[27]、混合胶囊网络[28]、平滑图卷积网络[29]和图几何矩卷积神经网络[30]等深度学习网络对已标记的LiDAR训练数据进行学习以建立分类模型,并依此模型对MS-LiDAR测试数据进行土地覆盖分类。该类方法能发掘并充分利用各类特征提供的有关目标的全面信息描述,能显著提高分割/分类精度,对比前2种特征利用方式具有明显优势。但是,该类方法的精度高度依赖于训练数据集、样本选取质量及样本数量,特别是深度学习的机器学习方法倘若没有海量的训练数据集做支撑,其分类精度对比浅层机器学习算法优势并不明显。另外,深度学习的分类算法的过拟合现象严重、泛化能力较低,在无法获取海量的训练数据集的实际工程项目中应用受限。而浅层机器学习方法为了高精度区分各类目标,往往需联合利用多光谱、几何、高程、纹理和植被指数等多类型特征,由此造成特征维度过高、计算量大。特别是随着LiDAR技术的发展,点密度越来越高,基于高维特征分割/分类的计算负担必然越来越重。因此,本文探讨仅联合有限类特征对MS-LiDAR点云进行非监督式的有效、准确的分割问题,提出一种基于多元高斯混合模型(Gaussian mixture model,GMM)的机载MS-LiDAR点云空谱联合分割算法。该算法立足于目标在多维空谱特征空间的概率分布,用理论上可以拟合出任意类型分布的多元GMM对其进行精确建模,从而解决MS-LiDAR点云在多维特征空间的聚类分割问题,理论严密,并为如何综合利用MS-LiDAR数据的多光谱及空间信息提供新途径。
1 实验数据
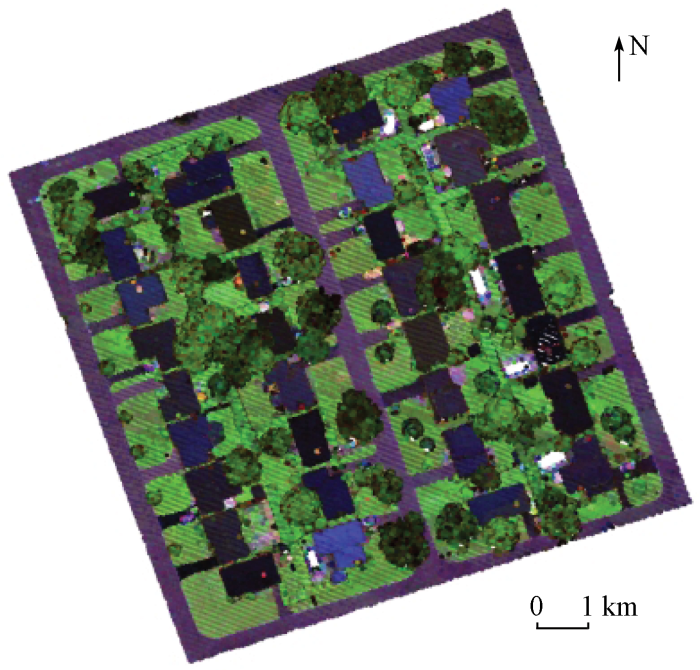
采用加拿大Optech Titan传感器采集的机载MS-LiDAR点云作为实验数据验证本文算法的有效性和可行性。Optech Titan系统配备了3个独立的主动成像通道,并且通道间有3.5°的偏转角间隔,3个波段波长分别为1 550 nm(中红外波段C1)、1 064 nm(近红外波段C2)及532 nm(绿光波段C3)。如图1所示,为LiDAR点云反射强度数据顶视图,数据在C1,C2和C3波段分别包含LiDAR点119 596,127 345和112 684个,实验区域位于加拿大安大略省南部杜林区奥沙瓦市(N43°54',E78°53')城区,包含不同屋顶材料的建筑物、灌木、乔木、草地、道路等土地覆被,区域内地形总体比较平坦、局部稍有起伏,部分建筑物周围有树木环绕。数据中每个波段的点云平均密度约为3.6点/m2,平均点间距为0.5 m。实验数据的获取参数如下: 飞行高度为1 075 m,扫描视场角为±20°,通道脉冲重复频率为300 kHz,扫描频率为40 Hz。利用商业软件TerraSolid对实验数据进行自动分类,进而以Optech Titan同机获取的纠正后的航拍图像为参考、以手工方式对分类结果进行后处理,将测试数据准确分为草地、道路、树木和建筑物4类作为标准参考数据,以定量评价提出算法的精度。
图1

2 基于多元GMM的机载MS-LiDAR点云分割
2.1 算法理论基础
图2
2.2 算法流程
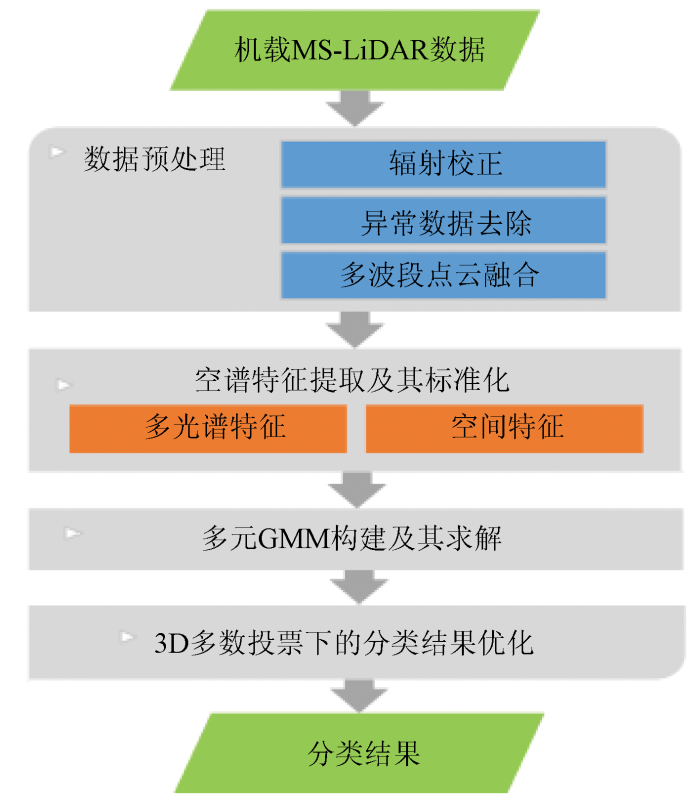
基于多元GMM的机载MS-LiDAR点云空谱联合分割的流程如图3所示。首先,对机载MS-LiDAR多波段独立点云进行辐射校正、异常数据去除及融合等预处理,研建同时表达空间位置及其对应多光谱信息的单一点云数据集; 然后,提取各激光点的多光谱、高程等特征构建空谱特征矢量,并通过特征标准化、离散化消除不同类型特征间的量纲差异; 再次,构建多元GMM拟合目标在空谱特征空间呈现的多峰分布,实现空谱一致性约束下的聚类分割; 最后,基于3D多数投票法优化分割结果。
图3
2.3 数据预处理
2.3.1 辐射校正及异常数据去除
为了提高后续基于激光反射强度信息的目标区分的准确性,对各波段点云的反射强度进行相对辐射校正[31]消除与距离、入射角等相关的辐射偏差,即
式中: I0和I分别为原始和校正后的反射强度; Rs为扫描仪与激光点的距离; Rref为飞行高度。辐射校正后,利用TerraSolid软件剔除高位、低位异常点。
2.3.2 多波段点云融合
Titan MS-LiDAR独立记录3个成像通道的点云数据,可记为:
式中: r,s和t分别为激光点索引; n1,n2和n3分别为各波段的激光点数; I为辐射校正后的激光反射强度; p和(x, y, z)分别为激光点及其对应的坐标。可见,其并不直接包含与空间位置对应的多波段光谱信息。为了获取兼具空间位置及其对应多波段光谱信息的单一点云数据,必须研究多波段点云的融合方法,预测各激光点在其他2个波段的强度值。基于各激光点在其他波段的强度值和其空间邻近点接近的思想,采用下述基于邻近点的融合方案(以C1波段为例): 针对C1波段中的各激光点,在半径为R的球体邻域内搜寻其在其他波段的空间邻近点,若存在,则取邻域点强度中位数[3]为该激光点在其他波段的反射强度值,否则,将该激光点在其他波段的强度值设置为0(认为被完全吸收)。半径R的设置与点云密度相关,本文设置为1 m。记融合后单一点云数据集为:
式中i和N分别为融合点云中各波段激光点的索引及个数。
2.4 空谱特征提取及其标准化
为了最大限度发挥P空谱合一的优势,提高目标间的可区分性,对P中的每个激光点提取一组点特征。这些点特征分为2类: ①多光谱特征,Titan MS-LiDAR数据包括3个波段的强度数据,分析每个波段上的目标强度差异可以提供更详尽的目标识别信息,因此,将多个波段的反射强度信息作为其中的一组特征; ②空间特征,LiDAR数据中本身蕴含着高精度的三维坐标信息,其中,高程坐标可以反映目标垂直方向上的结构信息,并一定程度上解决同谱异物及同物异谱问题,因此,将高程作为其中的另一组特征。若坡度起伏变化较大的区域,则采用归一化数字表面模型(normalized digital surface model,nDSM)获得相对高程值作为高程特征。
记P的特征数据集为
式中: mq和sq分别为标准化前
式中: minq和maxq分别为标准化后特征数据集
2.5 多元GMM构建及其求解
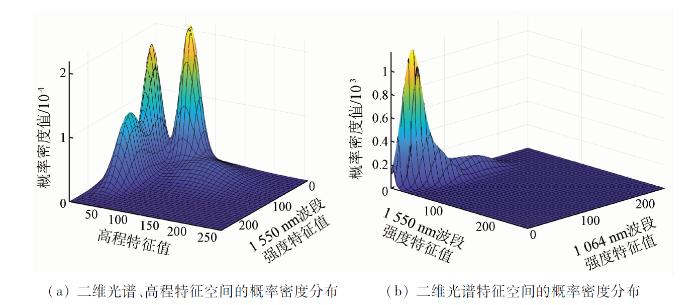
如前所述,目标在多维空谱特征空间的分布呈多峰且均符合高斯分布。因此,可利用多元GMM将其建模为若干个高斯分布的叠加。GMM是将点云特征的统计特性拟合为若干个高斯分布线性组合的概率模型[32],通过简单的高斯概率密度函数(被称为一个分模型)刻画复杂的概率密度函数的分布,只要选择合理的分模型个数和分模型参数,便可很好地刻画数据的空间分布及其特性。
记多元GMM的概率密度函数
式中: k和K分别为GMM中所叠加的高斯分布的索引及个数,K与聚类数相对应; μk,Σk和
令
其中假设
式(9)为θ的非线性函数,无法直接求偏导获取最大值。为了降低求解的复杂性,对其两边取对数,得到对数似然函数Q,即
进一步,采用期望最大化(expectation maximization,EM)算法最大化Q并求取参数θ,步骤如下:
1)设置聚类数K。在多维特征空间,利用K-means++算法对特征集
2)依据当前的q,计算各高斯分量对特征点的响应度gik,即第i个特征点属于第k个高斯分布的后验概率,公式为:
3)使用当前的响应度gik更新模型参数θ,即
4)计算Q(t),检查对数似然函数的收敛性,即||Q(t) - Q(t-1)||小于阈值e1或迭代次数大于设定阈值e2,若满足收敛的条件,则退出循环,否则令t'=t'+1,返回步骤2),直到收敛。
最后,对响应度矩阵按最大响应度原则确定各特征点的类属。其中,最大响应度原则即将最大响应度值所对应的地类作为当前特征点的类属。
2.6 3D多数投票下的分类结果优化
多元GMM是将MS-LiDAR点云映射至高程、多光谱特征构成的特征空间,然后获取多光谱及高程测度一致性约束下的聚类分割结果。但其仅考虑了多光谱及高程测度的分布,而未考虑邻近激光点类别间的空间一致性,由此导致对目标的特征描述不够全面、分割结果中噪声较多。为此,本文设计如下基于空间一致性约束的3D多数投票法进一步优化分割结果,消减噪声对分割过程的影响。
基于“大多数邻域点类在多元GMM模型分割后是正确的”假设,可将每个LiDAR点的类属分配为其周围点类属的众数,其具体操作为: 首先,针对每个激光点,在半径为R的球体邻域内搜寻其空间邻近点; 然后,判断空间邻近点的类属的众数,若众数出现的次数大于空间邻近点数的一半且众数与激光点的类属不一致,则将该激光点的类属修改为众数。其中,半径R的设置与点云密度相关,本文设置为1 m。
3 实验结果与分析
3.1 机载MS-LiDAR点云分割实验
实验旨在呈现点云分割及其定量精度评价结果。首先,利用相对辐射纠正、邻近点反距离插值的点云融合方案对原始的3个波段的独立LiDAR点云进行预处理,获取包含多个波段光谱信息的MS-LiDAR融合点云,如图4所示。
图4
然后,对融合点云进行空谱特征提取及标准化,构建特征数据集。进而,构建多元GMM对特征数据集在特征空间完成聚类分割,并进一步利用3D多数投票法优化分割结果。如前所述,利用多元GMM建模目标在特征空间的复杂聚类时,联合利用不同类型的特征,聚类结果不尽相同。为了测试不同的特征组合对分割精度的影响,并由此确定最佳的特征组合,设计了不同特征有效性的考察实验,如表1所示。
表1 不同特征组合下的分割精度对比
Tab.1
| 序号 | 特征组合 | 总体精度/% | Kappa系数 |
|---|---|---|---|
| ① | IC1 + z | 64.13 | 0.491 |
| ② | IC2 + z | 88.08 | 0.838 |
| ③ | IC3 + z | 65.45 | 0.509 |
| ④ | 88.72 | 0.846 | |
| ⑤ | IC2 + IC3 +z | 91.53 | 0.885 |
| ⑥ | IC3 + IC1 +z | 65.88 | 0.515 |
| ⑦ | 91.36 | 0.882 | |
| ⑧ | IC1 + IC2 + IC3 | 80.81 | 0.735 |
由表1可知: 对比特征组合①—③和④—⑦可知,对比单波段LiDAR,MS-LiDAR点云分割精度更高,总体精度提高了3.45~27.4百分点,Kappa系数提高了0.047~0.394。原因在于,前者包含的单波段强度信息更容易受同谱异物、同物异谱问题的影响,只能辅助用于点云分割。而MS-LiDAR数据则可通过多波段光谱信息的引入,利用不同目标在不同波段的辐射能量的差别提高目标解译精度,部分解决同物异谱、同谱异物的问题。但是,特征组合⑥中C1和C3波段组合并没有提高分割精度,这是由2个波段间具有较强的相关性造成的。对比特征组合⑦和⑧可知,高程特征z的融入显著提高了点云分割的精度。这是因为,高程特征可准确反映目标间高度特性的差异,提高各类间的区分性并有效解决“同物异谱、同谱异物”目标间的区分。由此可见,只有联合利用空谱信息才能取得更高的分割精度。对比特征组合④—⑦可知,同样是联合空谱特征,不同特征组合的点云分割精度均不同。原因在于,各目标在不同类特征中的可区分性存在差异; 特征组合⑤取得了最高的分类精度,是机载MS-LiDAR点云分割特征组合的最优方案,但其与特征组合⑦的分割精度相当。
表2 特征组合⑤和⑦分割优化前后精度对比
Tab.2
| 指标 | 特征组合⑤ | 特征组合⑦ | ||
|---|---|---|---|---|
| 优化前 | 优化后 | 优化前 | 优化后 | |
| 总体精度/% | 91.53 | 92.71 | 91.36 | 93.57 |
| Kappa系数 | 0.885 | 0.901 | 0.882 | 0.912 |
图5
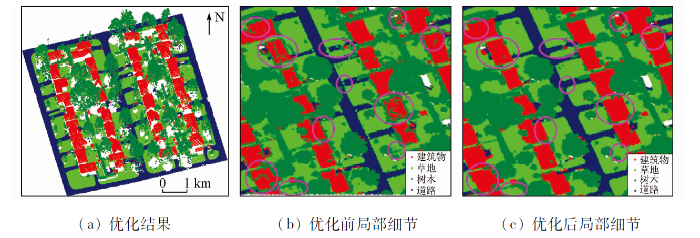
图5
优化结果及优化前后对比
Fig.5
Segmentation results and comparison before and after optimization
为了分析影响算法精度的因素,统计了分割结果的混淆矩阵,见表3。
表3 本文算法的混淆矩阵
Tab.3
| 实验数据 | 参考数据 | 合计 | 用户精度/% | |||
|---|---|---|---|---|---|---|
| 建筑物 | 道路 | 树木 | 草地 | |||
| 建筑物 | 19 981 | 37 | 709 | 128 | 20 855 | 95.81 |
| 道路 | 0 | 23 623 | 134 | 2 264 | 26 021 | 90.78 |
| 树木 | 407 | 145 | 28 312 | 2 016 | 30 880 | 91.68 |
| 草地 | 24 | 936 | 873 | 39 785 | 41 618 | 95.60 |
| 合计 | 20 412 | 24 741 | 30 028 | 44 193 | 119 374 | |
| 生产者精度/% | 97.89 | 95.48 | 94.29 | 90.03 | ||
| 总体精度: 93.57% Kappa系数: 0.912 | ||||||
由表3中道路的用户精度和草地生产者精度可知: 道路和草地的错分是影响算法精度的最主要因素。这是因为道路和草地空间邻近、高程接近,且过渡区域二者的光谱特征接近,由此导致二者无法精确区分。
3.2 算法对比实验
表4 本文算法和其他经典算法的精度对比
Tab.4
| 算法参考文献 | 算法原理 | 联合特征 | 总体精度/% | Kappa系数 |
|---|---|---|---|---|
| 本文算法 | 多元GMM | 多光谱、nDSM | 93.57 | 0.912 |
| Huo等[10] | SVM分类 | 多光谱、伪NDVIs、形态学剖面、多尺度形态学剖面、nDSM | 93.28 | 0.910 |
| Teo等[12] | SVM分类 | 多光谱、NDFIs、曲率、nDSM | 93.00 | 0.911 |
| Zou等[21] | 决策树分类 | 伪NDVI、绿化率、强度、高程、点数、返回数、类别、亮度、面积 | 91.63 | 0.895 |
| Fernandez-Diaz等[8] | 马氏距离 | 5个结构波段、2个波段强度 | 90.22 | 0.870 |
| Ahokas等[15] | 随机森林 | 多光谱、nDSM、点邻域特征 | 93.50 | — |
| Shaker等[18] | 对数似然分类 | 高程、高程变化、强度、强度变化、NDWI、回波数 | 96.50 | — |
| Wang等[14] | SVM分类 | 空间位置、多光谱、几何、结构 | 94.76 | 0.935 |
4 结论
针对机载MS-LiDAR土地覆盖分类问题,本文以低维度特征、高精度为原则,提出了基于多元GMM的空谱联合分割算法。该算法首先融合机载MS-LiDAR多波段独立点云,获取同时表达空间位置及其对应多波段光谱信息的单一点云; 然后,提取点云的多光谱、高程特征构建空谱特征数据集,并通过特征标准化、离散化消除不同类型特征间的单位和尺度差异; 再次,构建多元GMM建模目标在空谱特征空间呈现的复杂聚类; 最后,设计3D多数投票法优化分割结果。
实验基于实测的Optech Titan MS-LiDAR数据验证提出算法的有效性和可行性。实验结果表明: 联合C1,C2和C3波段强度及高程特征为最优的特征组合,最优分割结果的总体精度可达93.57%,Kappa系数可达0.912; 仅联合四维特征即可实现MS-LiDAR点云的高精度分类,优势明显。算法缺陷在于: 算法仅考虑了多光谱及高程特征,未来可考虑加入法向分布等有效特征进一步提高分类精度并适应繁杂的城市地物类别。此外,还可考虑将邻近点的空间相关性引入多元GMM但不增加模型参数估计的难度,以提高算法的抗噪性。
志谢
此次实验的数据来自加拿大Optech公司Titan机载多光谱LiDAR系统首次飞行采集的数据,在此表示衷心的感谢!
参考文献
An object-based approach for urban land cover classification:Integrating LiDAR height and intensity data
[J].DOI:10.1109/LGRS.8859 URL [本文引用: 1]
点云信息提取研究进展和展望
[J].
DOI:10.11947/j.AGCS.2017.20170345
[本文引用: 1]

点云是目前摄影测量、遥感、计算机视觉等多个领域广泛应用的数据源之一,而信息提取是点云处理、分析和应用的必经环节。为此,学术界已经提出了大量点云信息提取方法。本文从基元类型、提取特征、特征选择与分类器等3个视角概括了点云信息提取的相关研究现状,总结出点云信息提取存在的5个主要问题,点明了点云信息提取的6个主要发展趋势,并着重介绍了“融合多基元的点云信息提取范式”。
Advances and prospects of information extraction from point clouds
[J].
DOI:10.11947/j.AGCS.2017.20170345
[本文引用: 1]
Point cloud is one type of the widely used data sources in many communities such as photogrammetry, remote sensing, and computer vision etc. Moreover, information extraction is a necessary step in the process of point cloud processing, analysis and applications. As result, the scholars have proposed a great number of methods for point cloud information extraction. According to the three view points of primitive types, extracted features, and methods for feature selection and classification, this review paper summarizes the research status of point cloud information extraction. This paper also point out five main problems and six main trends in point cloud information extraction, especially introduces a new paradigm:fusion of multiple primitives for point cloud information extraction.
Multispectral LiDAR data for land cover classification of urban areas
[J].
DOI:10.3390/s17050958
URL
[本文引用: 2]
Airborne Light Detection And Ranging (LiDAR) systems usually operate at a monochromatic wavelength measuring the range and the strength of the reflected energy (intensity) from objects. Recently, multispectral LiDAR sensors, which acquire data at different wavelengths, have emerged. This allows for recording of a diversity of spectral reflectance from objects. In this context, we aim to investigate the use of multispectral LiDAR data in land cover classification using two different techniques. The first is image-based classification, where intensity and height images are created from LiDAR points and then a maximum likelihood classifier is applied. The second is point-based classification, where ground filtering and Normalized Difference Vegetation Indices (NDVIs) computation are conducted. A dataset of an urban area located in Oshawa, Ontario, Canada, is classified into four classes: buildings, trees, roads and grass. An overall accuracy of up to 89.9% and 92.7% is achieved from image classification and 3D point classification, respectively. A radiometric correction model is also applied to the intensity data in order to remove the attenuation due to the system distortion and terrain height variation. The classification process is then repeated, and the results demonstrate that there are no significant improvements achieved in the overall accuracy.
Evaluating the potential of multispectral airborne LiDAR for topographic mapping and land cover classification
[J].
Airborne multi-spectral LiDAR data for land-cover classification and land/water map-ping using different spectral indexes
[J].
Multispectral LiDAR point cloud classification:A two-step approach
[J].DOI:10.3390/rs9040373 URL [本文引用: 1]
Capability assessment and performance metrics for the Titan multispectral mapping LiDAR
[J].DOI:10.3390/rs8110936 URL [本文引用: 2]
机载多光谱LiDAR数据的地物分类方法
[J].
DOI:10.11947/j.AGCS.2018.20170512
[本文引用: 1]
机载多光谱LiDAR系统能够快速地获取大范围地表面上地物光谱和几何数据,并能够保证所获取的光谱与空间几何数据在空间和时间上相对完整和一致性。支持向量机(SVM)是一种基于小样本的学习方法,它避开了从归纳到演绎的传统分类过程。因此,本文提出了基于SVM多光谱LiDAR数据的地物目标分类方法。该方法首先将多个独立波段的LiDAR数据融合为单一的、包含多个波段信息的点云数据,然后将融合后的点云内插为距离影像和多光谱影像,最后利用SVM进行多光谱LiDAR数据的地物覆盖分类。通过对加拿大Optech公司的Titan机载多光谱LiDAR数据的试验证明:相对于传统的单波段LiDAR数据,多光谱LiDAR数据可以获得较好的地物分类精度;比较试验发现SVM分类方法适用于多光谱LiDAR数据的地物分类。
Object classification using airborne multispectral LiDAR data
[J].
DOI:10.11947/j.AGCS.2018.20170512
[本文引用: 1]
Airborne multispectral LiDAR system,which obtains surface geometry and spectral data of objects,simultaneously,has become a fast effective,large-scale spatial data acquisition method.Multispectral LiDAR data are characteristics of completeness and consistency of spectrum and spatial geometric information.Support vector machine (SVM),a machine learning method,is capable of classifying objects based on small samples.Therefore,by means of SVM,this paper performs land cover classification using multispectral LiDAR data. First,all independent point cloud with different wavelengths are merged into a single point cloud,where each pixel contains the three-wavelength spectral information.Next,the merged point cloud is converted into range and intensity images.Finally,land-cover classification is performed by means of SVM.All experiments were conducted on the Optech Titan multispectral LiDAR data,containing three individual point cloud collected by 532 nm,1024 nm,and 1550 nm laser beams.Experimental results demonstrate that ①compared to traditional single-wavelength LiDAR data,multispectral LiDAR data provide a promising solution to land use and land cover applications;②SVM is a feasible method for land cover classification of multispectral LiDAR data.
Supervised spatial classification of multispectral LiDAR data in urban areas
[J].DOI:10.1371/journal.pone.0206185 URL [本文引用: 2]
Multispectral LiADR data fusion via multiple kernel learning for remote sensing classification
[C]//
Analysis of land cover classification using multi-wavelength LiDAR system
[J].DOI:10.3390/app7070663 URL [本文引用: 2]
Combined application of 3D spectral features from multispectral LiDAR for classification
[C]//
A Discriminative tensor representation model for feature extraction and classification of multispectral LiDAR data
[J].DOI:10.1109/TGRS.36 URL [本文引用: 2]
Towards automatic single-sensor mapping by multispectral airborne laser scanning
[J].
基于多光谱LiDAR数据的道路中心线提取
[J].
DOI:10.12082/dqxxkx.2018.170634
[本文引用: 1]
针对城市三维激光点云中,道路与地面高程相差小、激光反射强度相近使得道路提取困难;广场、停车场等地物的高程、反射强度与道路极为相近,容易产生错误提取的问题。本文设计了一种描述道路条带信息的局部二进制特征(Stripe Local Binary Feature, SLBF),结合LiDAR数据中的三维信息和多光谱信息获得基于强度、密度和平坦度等统计特征(Statistics-Based Feature, SBF),并采用随机森林分类器实现了机载点云中道路面点云和非道路面点云的有效提取。通过欧式聚类精化道路点云和迭代腐蚀边界细化中心线,进而获得矢量化的道路中心线。以Waddenzee区域的多光谱机载点云数据进行实验验证,道路中心线提取结果的完整度达到94.15%,准确度达到97.95%,精度达到92.28%。实验结果表明,该方法可以有效地提取道路中心线,同时由于设计的特征具有不变性,能够适用于城市和林间小路等各种环境。
Road axis extraction method based on multi-spectral LiDAR data
[J].
机载多光谱LiDAR的随机森林地物分类
[J].
DOI:10.13474/j.cnki.11-2246.2019.0356
[本文引用: 1]
机载多光谱LiDAR技术利用激光进行探测和测距,不仅可以快速获取地面物体的三维坐标,还可以获得多个波段的地物光谱信息,可广泛用于地形测绘、土地覆盖分类、环境建模、森林资源调查等。本文提出了多光谱LiDAR的随机森林地物分类方法。该方法通过对LiDAR强度数据和高程数据提取分类特征,完成多光谱LiDAR的随机森林地物分类;并分析随机森林的特征贡献度特性,采用后向特征选择方法实现分类特征选择。通过对加拿大Optech Titan多光谱LiDAR数据的试验表明:随机森林方法可以获得较好的地物分类精度,而且可以适当地去除部分冗余和相关的特征,从而有效提高分类精度。
Random forest-based land-use classification using multispectral LiDAR data
[J].
DOI:10.13474/j.cnki.11-2246.2019.0356
[本文引用: 1]
Airborne LiDAR systems can quickly obtain three-dimensional coordinates of ground objects, which has been widely used in topographic mapping, engineering construction, environmental monitoring, and land-cover and land-use classification, and so on. This paper, by means of random forest algorithm, performs land-cover classification using airborne multispectral LiDAR data. The proposed method extracts features from elevation and multispectral images combined by three individual intensity images, performs a backward feature selection according to the variables importance calculated by RF, and finally applies RF to the multispectral images. All experiments are conducted on the Optech Titan multispectral LiDAR data.The experimental results show that RF can achieve a good performance in land-cover classification, and the proposed RF-based backward feature selection method contributes to the improvement of classification by iteratively removing redundancy and related features.
Automatic land-water classification using multispectral airborne LiDAR data for near-shore and river environments
[J].
DOI:10.1016/j.isprsjprs.2019.04.005
[本文引用: 2]
Rapid mapping of near-shore and coastal regions has become an indispensable task for the local authority to serve the purpose of coastal management and post-disaster monitoring. Aerial photogrammetry and satellite remote sensing have been utilized to fulfill such a task in the last few decades. Airborne LiDAR can further compensate the drawbacks of these image capturing approaches as a result of the direct geo-referenced 3D point cloud. The recent introduction of multispectral airborne LiDAR, such as the Teledyne Optech Titan, can potentially enhance the capability of water mapping, minimize the involvement of manual intervention and reduce the use of supplementary information or ancillary data. This study demonstrates the use of multispectral airborne LiDAR data for automatic land-water classification under different coastal and inland river environments. Two automatic training data selection methods are proposed. The first method utilizes Gaussian mixture model (GMM) to split preliminarily the land and water region based on the elevation/intensity histogram, and the second method is developed based on the use of scan line intensity-elevation ratio (SLIER). Subsequently, various LiDAR-derived feature sets, particularly based on the multispectral LiDAR intensity, are constructed in order to serve as an input for the log-likelihood classification model. Two optional post-classification enhancements can be implemented to further adjust the misclassified data points. The proposed workflow was evaluated with four Optech Titan datasets collected for different near-shore and river environments that are located nearby Lake Ontario, Ontario, Canada. Our experimental work demonstrated that the multispectral LiDAR intensity data was capable of enhancing the classification capability, where an overall accuracy better than 96% was achieved in most of the cases.
Testing of land cover classification from multispectral airborne laser scanning data
[J].
Application of image classification techniques to multispectral LiDAR point cloud data
[C]//
3D land cover classification based on multispectral LiDAR point clouds
[J].
Deep AlexNet with reduced number of trainable parameters for satellite image classification
[J].DOI:10.1016/j.procs.2018.10.342 URL [本文引用: 1]
An object-based convolutional neural network (OCNN) for urban land use classification
[J].
Hyperspectral image classification based on 3-D separable ResNet and transfer learning
[J].DOI:10.1109/LGRS.8859 URL [本文引用: 1]
Land-cover classification of multispectral LiDAR data using CNN with optimized hyper-parameters
[J].DOI:10.1016/j.isprsjprs.2020.05.022 URL [本文引用: 1]
A comparative land-cover classification feature study of learning algorithms:DBM,PCA,and RF using multispectral LiDAR data
[J].DOI:10.1109/JSTARS.4609443 URL [本文引用: 1]
Land cover classification of multispectral LiDAR data with an efficient self-attention capsule network
[J].
A hybrid capsule network for land cover classification using multispectral LiDAR data
[J].DOI:10.1109/LGRS.8859 URL [本文引用: 1]
Spatial-spectral smooth graph convolutional network for multispectral point cloud classification
[C]//
Building extraction from airborne multi-spectral LiDAR point clouds based on graph geometric moments convolutional neural networks
[J].
DOI:10.3390/rs12193186
URL
[本文引用: 1]
Building extraction has attracted much attentions for decades as a prerequisite for many applications and is still a challenging topic in the field of photogrammetry and remote sensing. Due to the lack of spectral information, massive data processing, and approach universality, building extraction from point clouds is still a thorny and challenging problem. In this paper, a novel deep-learning-based framework is proposed for building extraction from point cloud data. Specifically, first, a sample generation method is proposed to split the raw preprocessed multi-spectral light detection and ranging (LiDAR) data into numerous samples, which are directly fed into convolutional neural networks and completely cover the original inputs. Then, a graph geometric moments (GGM) convolution is proposed to encode the local geometric structure of point sets. In addition, a hierarchical architecture equipped with GGM convolution, called GGM convolutional neural networks, is proposed to train and recognize building points. Finally, the test scenes with varying sizes can be fed into the framework and obtain a point-wise extraction result. We evaluate the proposed framework and methods on the airborne multi-spectral LiDAR point clouds collected by an Optech Titan system. Compared with previous state-of-the-art networks, which are designed for point cloud segmentation, our method achieves the best performance with a correctness of 95.1%, a completeness of 93.7%, an F-measure of 94.4%, and an intersection over union (IoU) of 89.5% on two test areas. The experimental results confirm the effectiveness and efficiency of the proposed framework and methods.
Radiometric correction and normalization of airborne LiDAR intensity data for improving land-cover classification
[J].
Maximum a posteriori estimation for multivariate Gaussian mixture observations of Markov chains
[J].DOI:10.1109/89.279278 URL [本文引用: 1]
Estimating the components of a mixture of normal distributions
[J].

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}