

0 引言
根据变化检测所用数据的不同,建筑物的变化检测方法主要可以分为二维变化检测和三维变化检测2大类[6]。二维变化检测方法通常以航天、航空影像为数据源,虽然经过了多年的发展,但受制于影像的透视变换、混合像元、植被季节性变化及阴影等多方面数据源的问题,二维变化检测方法存在一定的局限性[7⇓-9]。随着近年来传感器技术和密集匹配技术的快速发展,激光点云、影像密集匹配点云的几何精度有了显著的提高。与二维影像数据相比,三维点云及其衍生数据产品包含高程数据,具有良好的几何性质。同时,建筑物的变化往往伴随着高程变化,使得三维数据能够较好地反映建筑物的变化情况,基于三维数据的建筑物变化检测方法也因此引起了广泛关注。
建筑物的三维变化检测方法可分为基于单一几何信息的建筑三维变化检测和结合几何与光谱信息的建筑物三维变化检测2大类[10]。基于单一几何信息的建筑物三维变化检测方法通常以2个时相数据的高程差或欧式距离作为变化测度,然后使用阈值分割提取变化区域,在此基础上使用形态学处理和聚类对变化区域进精细化处理。Murakami等[11]利用不同时相的激光点云生成数字表面模型(digital surface model,DSM),然后通过对DSM的简单几何比较初步提取变化区域,最后通过形态学处理滤除伪变化区域。Tian等[12]利用提出的鲁棒方法计算高差,并利用阈值初步提取变化建筑物,最后利用矩形度剔除误检测。Chaabouni-chouayakh等[13]通过2个时相的数字高程模型(digital elevation model,DEM)做差提取变化区域,然后利用形态学开闭处理优化检测区域。Sasagawa等[14]首先利用DSM差分提取变化区域,然后生成变化区域的多边形。虽然基于单一几何信息的变化检测方法实现起来较简单,但这类方法易受三维数据的质量、配准精度的影响。
几何信息和光谱信息结合使用的方法主要有后精化、直接特征融合及分类后处理3种[10]。后精化方法通常利用几何信息比较初步提取候选变化区域,然后利用光谱信息对候选变化区域进行精化; 直接特征融合方法通常将2个时相三维数据的高差或欧氏距离作为一种特征,然后融合几何、光谱2类差分特征进行变化区域提取; 分类后处理方法将DSM作为光谱数据的补充波段以提高分类精度,然后对分类结果标签进行对比从而提取变化区域。Pang等[15]利用2个时相的DSM做差提取候选变化区域,然后通过候选变化对象的平整度和高度提取变化建筑物。彭代锋等[16]对激光点云进行内插进而生成DSM,然后对DSM做差并使用固定阈值提取变化区域,在此基础上将变化区域投影到影像从而剔除伪变化区域。杨钰琪等[17]基于区域生长对点云进行分割,并结合差分DSM(differential DSM,dDSM)判断分割对象是否发生变化。Tian等[18]利用Dempster-Shafer融合理论将全色影像的KL(kullback-leiber)散度特征和DSM的高差特征结合提取候选变化区域,并利用多光谱影像剔除候选变化区域中的植被和阴影。Pang等[19]将归一化DSM(normalized DSM,nDSM)和dDSM作为特征,利用图割算法提取候选变化区域,然后使用航空影像提取变化的建筑物。Wang等[20]将差分nDSM(differential nDSM,dnDSM)和形态学建筑物指数作为特征,利用图割算法提取变化建筑物。结合几何与光谱信息的建筑物三维变化检测方法在大多数情况下能够取得不错的变化检测效果,但容易受几何对比结果、融合参数和分类结果等多种因素的影响。
针对以上问题,本文提出一种联合无人机影像生成DSM和正射影像(digital orthophoto map,DOM)的多层次建筑物变化检测方法。利用多层高差阈值提取候选变化区域,并基于可见光植被指数剔除植被及面积较小区域; 对最低层变化检测结果进行连通域分析,对每个连通对象使用较高层的变化检测结果剔除最低层中的误检测; 统计每个变化对象的正、负高差值数量关系,确定变化类型。
1 研究方法
本文的方法流程如图1所示。
图1
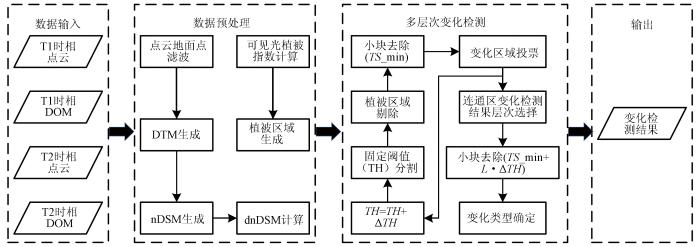
1.1 数据预处理
1.1.1 高差特征计算
在2个时相的nDSM几何精度和配准精度较高时,直接对nDSM差分得到dnDSM并不会引起明显的误检测。无人机影像点云的几何精度受影像重叠度、影像分辨率、控制点刺点精度及重建算法等多种因素的影响,不同时相的无人机影像点云通常会存在小幅的偏移和旋转,直接差分得到dnDSM会在建筑物边缘形成误检测。本文使用Tian等[12]提出的鲁棒的高差特征提取方法以减轻边缘部分的影响,具体计算公式为:
式中: i,j为点的横、纵坐标;
1.1.2 植被区域提取
城镇区域中的非地面区域中除建筑物之外,还包括植被、车辆、路灯等其他干扰因素。相较于建筑物,车辆、路灯等其他地物通常高度较低、面积较小,因此通过高差阈值或面积阈值可以将其较好的去除。植被区域具有一定的高度,而且在公园、花圃等特定的区域,植被的占地面积也大,容易干扰建筑物的变化检测,因此需要在非地面区域中剔除植被区域。
本文采用可见光植被指数
式中: EXG为过绿指数; EXR为过红指数;
若
1.2 多层次变化检测
1.2.1 多层次变化区域提取
图2
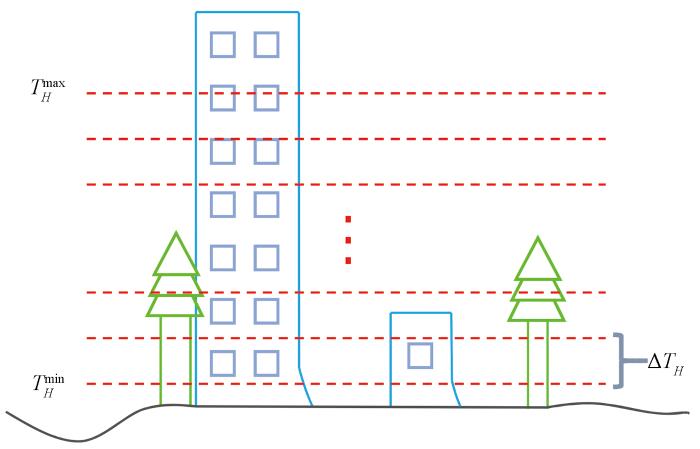
此外,通过单一面积阈值进行小块目标剔除时,面积阈值过小易导致部分具有一定高度的植被难以被剔除,而面积阈值过大易导致低矮变化建筑物被误剔除。
综上,使用单一固定阈值进行变化检测时会引起误检或漏检,而采用多层次阈值能够有效解决此问题。本文通过较低的高差阈值保留低矮变化建筑物,利用较大的高差阈值优化高大建筑物的变化检测精度,并通过递增的面积阈值剔除具有一定高度的植被,保留低矮建筑物。具体步骤如下:
1)设定高差阈值下限
2)提取高差阈值为
式中:
3)对于
4)对变化检测结果进行连通域分析,剔除面积较小的区域。
5)保存处理后的变化检测结果
6)重复步骤2)—5),直至高差阈值
7)对于任一点
式中:
8)对最低层的变化检测结果
9)根据
式中:
10)计算
式中:
11)重复步骤9)和10),直至所有对象完成处理。
1.2.2 变化类型确定
通过1.2.1的多层次变化区域提取,可以确定哪些建筑物发生了变化,但无法明确变化类型。本文的高差特征是利用新时相的nDSM减去旧时相的nDSM计算得到,在理想情况下,如果连通对象的高差特征值都是正值,则认为是发生了增高(新建)变化,反之则认为是发生了降低(拆除)变化,但由于存在噪声点干扰,同一个连通对象可能同时存在增高、降低2种变化。为此,针对每一个变化对象,本文通过比较对象内所有点的2种变化占比,选择占比较大者为其变化状态。
2 实验与分析
2.1 实验数据
为验证本文提出方法的有效性,使用某地2019年4月和2022年9月2个时相的无人机影像数据进行实验。影像具体信息如表1所示。
表1 实验数据采集信息
Tab.1
| 时相 | 分辨率 | 航高/m | 焦距/mm | 数量 |
|---|---|---|---|---|
| T1 | 4 000×6 000 | 约200 | 53.27 | 1 596 |
| T2 | 7 952×5 304 | 约180 | 56 | 2 650 |
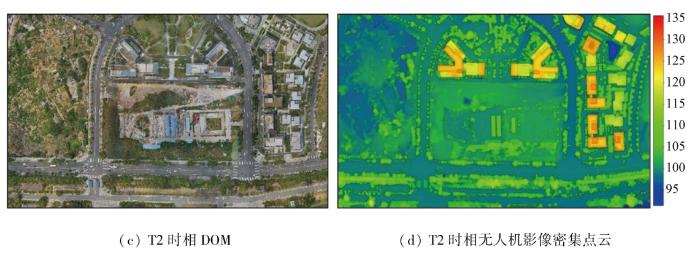
实验区内地势较为平坦,主要包含植被、建筑物、裸地、道路等类型地物,同类型地物在高度、体积上都有着较大的差异。此外,因植被的季节性变化、建筑物外墙褪色,同一地物的颜色也有着较为显著的差异。实验数据如图3所示,覆盖范围为589.8 m×349.9 m。其中,T1时相的密集点云的密度约为25 pts/m2,T2时相的密集点云的密度约为25 pts/m2; T1和T2时相DOM的分辨率均为0.05 m。
图3-1
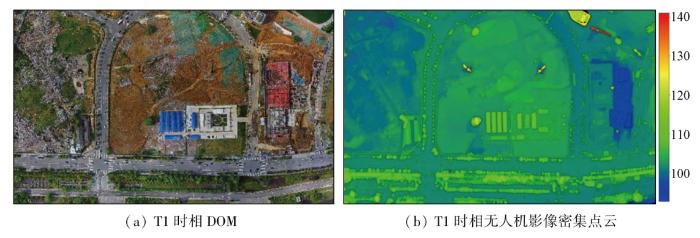
图3-2
2.2 参数设置
可见光植被指数的分割阈值
表2 参数设置
Tab.2
| 参数 | 本文取值 |
|---|---|
| 植被分割阈值 | 0 |
| 高差阈值下限 | 1 m |
| 高差阈值增量 | 0.5 m |
| 高差阈值上限 | 12 m |
| 层数选择参数 | 0.5 |
| 面积阈值下限 | 10 m2 |
| 面积阈值增量 | 4 m2 |
2.3 实验结果与分析
为分析本文方法过程,选择了一些典型且存在显著差异的中间结果进行展示。
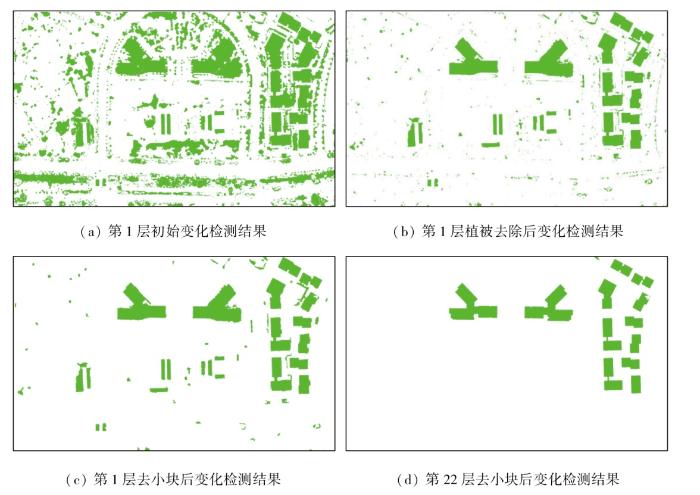
图4(a)是第1层的初始变化检测结果,可以看到其中有很多植被区域,这些植被区域有的相对孤立,也有一些与建筑物粘连; 图4(b)是第1层去除植被后的变化检测结果,无论是孤立的植被,还是与建筑物粘连的植被,大部分都已被剔除,但仍然存在很多椒盐噪声、破碎的小区域; 图4(c)是第1层去除小块的变化检测结果,大量的椒盐噪声、破碎区域都被剔除。从图4(c)中可以看到,经过植被剔除、去小块后的第1层变化检测结果中,低矮变化建筑物大部分被保留了下来,但一些植被引起的误检测也依旧存在。图4(d)是第22层经过植被剔除、去小块后的变化检测结果,与第1层最终结果相比,孤立植被、与建筑物粘连植被引起的误检测都被完整地剔除,但小型建筑物也随之被剔除。因此融合多层次的变化结果可以较好地平衡精度和准确率。
图4
为了进行实验对比,本文还实现了2种基线方法: 基于直接阈值分割的三维变化检测方法(direct threshold segmentation of dnDSM,T-dnDSM)和基于图割的三维变化检测方法(graph-cut based DSM segmentation,DSM-GC)[20]。
为了定量地评价本文方法及对比方法的变化检测精度,将实验结果与人工标注数据进行了比较。定量评价指标包括精确率(Precession)、召回率(Recall)及
式中:
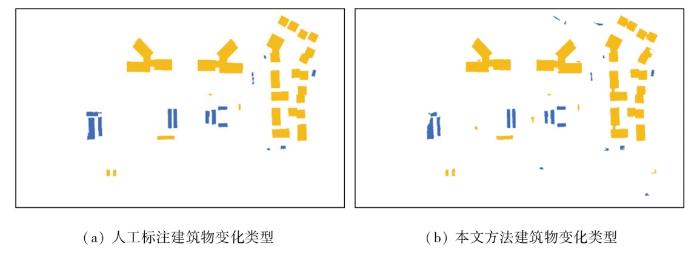
图5(a)是人工标记的变化建筑物,图5(b)是本文方法的建筑物变化检测结果,图5(c)是T-dnDSM方法的建筑物变化检测结果(在高差阈值为12 m时精度最高,本文取12 m作为分割阈值),图5(d)是DSM-GC方法的建筑物变化检测结果。其中,灰色虚线框内主要是高大的变化建筑物,而粉色虚线框内主要是低矮的变化建筑物。对于高大的变化建筑物,本文方法和T-dnDSM方法相类似,均检测到了所有的高大变化建筑物; DSM-GC方法则漏检了1个高大建筑物。对于低矮的变化建筑物,本文方法存在8个误检测区域,但仅漏检了1个低矮变化建筑物,而T-dnDSM方法误检测区域虽然只有4个,但存在大量的低矮变化建筑物漏检; DSM-GC方法漏检了3个低矮变化建筑物,且存在12个误检测区域。综合考虑误检、漏检区域的数量,本文方法取得了最佳的变化检测结果。
图5

3种方法的精度如表3所示。T-dnDSM方法精确度最高,达到了95.37%,而DSM-GC方法精确度最低,仅为90.41%; 本文方法召回率最高,为93.57%,精确度较高的T-dnDSM召回率却最低,仅为78.35%; 本文方法的综合精度最高,为94.40%,而T-dnDSM最低,仅为86.03%。
表3 建筑物变化检测精度
Tab.3
| 方法 | |||
|---|---|---|---|
| 本文方法 | 95.23 | 93.57 | 94.40 |
| T-dnDSM | 95.37 | 78.35 | 86.03 |
| DSM-GC | 90.41 | 89.20 | 89.81 |
与基线方法相比,本文方法在保证提取低矮变化建筑物的同时,能够优化提取到的高大变化建筑物,达到较高的变化检测精度。
图6
本文方法设置了一些参数,对建筑物变化检测精度有一定影响,因此对关键的参数进行了敏感性分析。图7是
图7
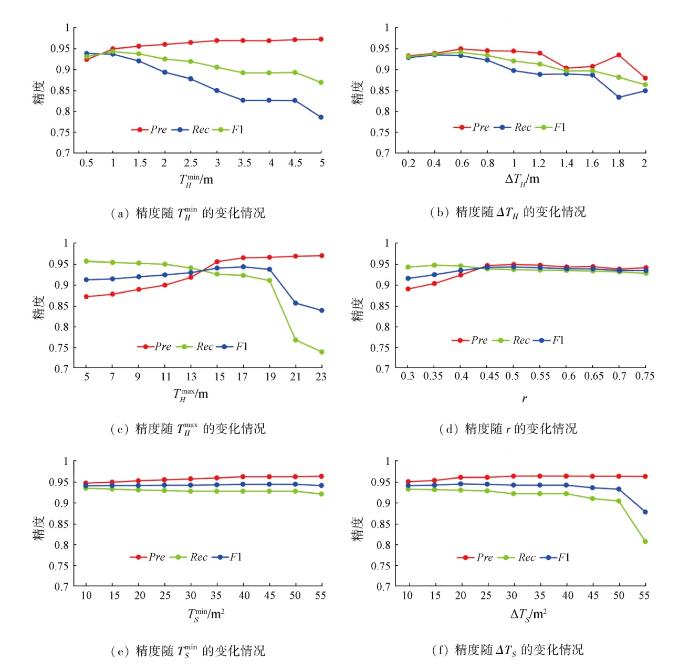
在变化检测场景发生变化时,植被分割阈值
3 结论
本文提出了一种联合无人机影像生成DSM和DOM的多层次建筑物变化检测方法,该方法充分利用了多层高差阈值提取到的变化检测结果,在保留低矮变化建筑物的同时,能够提高高大建筑物的检测精度,克服了单一高差阈值提取变化建筑物时的不足。实验结果表明本文方法
参考文献
科技创新与新型城镇化相关性的实证分析——以长株潭城市群为例
[J].
DOI:10.15957/j.cnki.jjdl.2022.08.009
[本文引用: 1]

科技创新是实现新型城镇化高质量发展的重要手段。以国家自主创新示范区长株潭城市群为例,通过构建科技创新与新型城镇化相关性分析模型,实证分析了科技创新对新型城镇化发展的影响。结果表明:2000—2020年,长株潭城市群的科技创新水平和新型城镇化水平提升迅速;科技创新与新型城镇化呈正相关关系,科技创新对新型城镇化有显著影响,并且两者之间存在长期稳定的平衡关系;科技创新与人口城镇化、经济城镇化、社会城镇化等方面指标之间总体上存在显著正相关。最后,根据实证结果提出科技创新加快新型城镇化发展的对策建议。
Correlation between technology innovation and new-type urbanization: A case study of the Changsha-Zhuzhou-Xiangtan urban agglomeration
[J].
政策工具视角下我国城镇化政策文本量化研究——基于2014—2020年的国家政策文本
[J].
Quantitative research on urbanization policy documents in China from the perspective of policy tools:Base on national policy documents from 2014 to 2020
[J].
国家发展改革委印发《2022年新型城镇化和城乡融合发展重点任务》
[J].
National development and reform commission issues “Key tasks of new urbanization and urban-rural integration development in 2022”
[J].
从实景三维建模到数字孪生建模
[J].
DOI:10.11947/j.AGCS.2022.20210640
[本文引用: 1]
从实景三维建模到数字孪生建模是国家数字经济和智慧社会建设与发展的基本需求。本文探讨了实景三维建模和数字孪生建模的关键技术内涵,介绍了数字乡村、未来社区和智能铁路等典型应用场景。广域范围实景三维建模在低成本高效数据采集和智能化自动化三维精细建模与动态更新方面面临挑战,城市级或重大工程级的数字孪生建模在全要素整体性的表征数据与机理模型集成表达方面还存在关键技术瓶颈。测绘技术亟须多学科交叉融合创新,突破天空地有机协同实时动态获取多细节层级实景三维数据、智能化处理多专业多尺度多模态时空数据、不完备数据条件下复杂场景的三维实体化精细建模、表征数据与机理模型结合的全生命周期数字孪生模型动态构建等核心关键技术,形成通用地理空间智能,实现测绘技术的高质量发展和对经济社会发展不可替代的更有力的基础支撑。
From real 3D modeling to digital twin modeling
[J].
DOI:10.11947/j.AGCS.2022.20210640
[本文引用: 1]
From real 3D modeling to digital twin modeling is the basic requirement for the construction and development of the country's digital economy and smart society. This paper discusses the connotations and key technologies of real 3D modeling and digital twin modeling, and introduces three typical application scenarios: digital villages, future communities and intelligent railways. Wide-area real 3D modeling is facing challenges in low-cost and efficient data collection and intelligent automated modeling and dynamic updating. There are still key technical bottlenecks in the integrated expression of all-element holistic representation data and mechanism models for digital twin modeling at the city level or major engineering level. Surveying and mapping technology is in urgent need of multi-disciplinary cross-integration innovation, breakthroughs in organic collaboration between the sky and the ground, real-time and dynamic acquisition of multi-detailed real 3D data, automated intelligent processing of multi-specialty, multi-scale and multi-modal spatio-temporal data, and detailed 3D construction of complex scenes under incomplete data conditions. Core key technologies such as dynamic construction of full-life-cycle digital twin models that combine characterization data and mechanism models to form general geospatial intelligence to achieve high-quality development of surveying and mapping technology and an irreplaceable and more powerful basic support for economic and social development.
高分辨率遥感影像的随机森林变化检测方法
[J].
DOI:10.11947/j.AGCS.2017.20170074
[本文引用: 1]
基于面向对象分析(OBIA)的遥感影像变化检测研究已取得显著的进展,代表了遥感影像变化检测的发展范式,未来是发展更加智能的解译分析方法。随机森林作为一种新的机器学习算法,其预测效果和性能稳定性要优于许多单预测器和集成预测方法。本文充分利用OBIA及随机森林机器学习算法的优势,提出了利用随机森林进行面向对象的遥感影像变化检测。首先基于熵率对影像进行超像素分割,通过最优超像素个数评价指数来获取最佳的影像分割结果,并提取每个超像素在前、后时相影像上的光谱特征和Gabor特征作为随机森林的特征输入数据,用于模型的训练。在初始像素级检测结果之上,自动进行分类样本选择并构建分类器模型,用训练好的模型来提取最终的变化区域。利用Quickbird、IKONOS、SPOT-5等3组多光谱影像进行试验,结果表明,本文方法在变化检测精度上要优于对比方法。
Change detection method for high resolution remote sensing images using random forest
[J].
DOI:10.11947/j.AGCS.2017.20170074
[本文引用: 1]
Studies based on object-based image analysis (OBIA) representing the paradigm shift in remote sensing image change detection (CD) have achieved remarkable progress in the last decade.Their aim has been developing more intelligent interpretation analysis methods in the future.The prediction effect and performance stability of random forest (RF),as a new kind of machine learning algorithm,are better than many single predictors and integrated forecasting method. This paper presents a novel RF OBIA method for high resolution remote sensing image CD that makes full use of the advantages of RF and OBIA. Firstly,the entropy rate segmentation algorithm is used to segment the image for the purpose of measuring the homogeneity of super-pixels. Then the optimal image segmentation result is obtained from the evaluation index of the optimal super-pixel number.Afterwards,the spectral features and Gabor features of each super-pixelareextracted and used as feature datasets for the training of RF model.On the basis of the initial pixel-level CD result,the changed and unchanged samples are automatically selected and used to build the classifier model in order to get the final object-level CD result.Experimental results on Quickbird,IKONOS and SPOT-5 multi-spectral images show that the proposed method out performs the compared methods in the accuracy of CD.
3D change detection-approaches and applications
[J].
Object-based 3D building change detection on multi-temporal stereo images
[J].
结合邻域信息和结构特征的遥感影像变化检测
[J].
DOI:10.11947/j.AGCS.2021.20200130
[本文引用: 1]
为提高像元级变化检测方法的精度,提出一种结合邻域信息和结构特征的遥感影像变化检测方法。该方法涵盖邻域相关影像(neighborhood correlation image,NCI)、匹配误差和结构特征3种属性特征。首先,通过邻域相关分析技术获得表示上下文信息的邻域相关影像,利用邻域间像素的互相关性进行模板匹配获得匹配误差。然后,基于方向梯度信息提取能抵抗影像间光谱差异的结构特征。随后将邻域相关影像、匹配误差、结构特征作为决策树的分类属性,获取初始变化检测结果。最后,利用马尔可夫随机场(Markov random field,MRF)对其进行优化,获得最终的二值变化图。本文通过采用两组不同传感器的双时相遥感影像进行试验。结果表明,相较于采用变化向量分析法(change vector analysis,CVA)、单一邻域信息法及邻域信息和纹理特征相结合的方法,本文方法有效提高了变化检测的精度。
Change detection of remote sensing images by combining neighborhood information and structural features
[J].
DOI:10.11947/j.AGCS.2021.20200130
[本文引用: 1]
In order to improve the accuracy of pixel-level change detection methods, this paper proposes a novel change detection method for remote sensing images by combining neighborhood information (including the neighborhood correlation image (NCI) and matching errors) and structural features. First, a technique of neighborhood correlation analysis is used to obtain the NCI which represents the context information, and the cross-correlation of neighborhood pixels is used to obtain matching errors by a template matching scheme. Then, structure features of images are extracted using orientated gradient information, which are robust to spectral differences between images. Subsequently, the initial change detection results is obtained by using the NCI, the matching errors, and structural features as the classification attributes of a decision tree. Finally, the Markov Random Field (MRF) is used to optimize the results, yielding the final binary map. The proposed method has been evaluated with two sets of bi-temporal remote sensing images from different sensors. Experimental results demonstrate that this method effectively improves the accuracy of change detection compared with the change vector analysis method, the single neighborhood information method and the method combining neighborhood information and texture features.
Building change detection using old aerial images and new LiDAR data
[J].
多时相遥感影像的变化检测研究现状与展望
[J].
DOI:10.11947/j.AGCS.2022.20220070
[本文引用: 2]
变化检测作为摄影测量与遥感领域的研究热点之一,也是人工智能体系中极具研究价值的技术分支。二者的快速发展与深度融合,已使海量、复杂和多样的遥感数据快速智能化处理成为可能,广泛应用于资源监测、城市规划、灾害评估等诸多领域。随着遥感技术和计算能力的不断革新,变化检测体系也在不断发展和演化。本文主要从几何和语义两个角度对变化检测方法进行了分析和归纳总结,重点分析了几何信息的利用方式及深度神经网络的特征融合方式,随后总结了常用的变化检测公开样本数据集,最后对当前变化检测应用中遇到的核心问题及未来发展趋势进行了梳理与展望。
Review and prospect in change detection of multi-temporal remote sensing images
[J].
DOI:10.11947/j.AGCS.2022.20220070
[本文引用: 2]
Change detection (CD), as one of the hot spots in the field of photogrammetry and remote sensing, is a technology branch with important research value in artificial intelligence (AI) systems. The rapid development and deep integration of the two subjects have made it possible to automatic and intelligent process the massive, complex and diverse remote sensing datasets. It has been widely used in many areas, such as resources monitoring, urban planning, disaster assessment, etc. With the development of the remote sensing and computing power, change detection is also evolving. This paper mainly analyzes and summarizes the current change detection methods from the perspectives of geometry and semantics. We focus on the utilization of geometric information and the feature fusion method of deep neural networks. Furthermore, the paper provides a summary of open datasets derived from different sensors, along with information related to change detection. Finally, we point out the challenges of the change detection and the future trends of the area are summarized and prospected.
Change detection of buildings using an airborne laser scanner
[J].
Automatic 3D change detection based on optical satellite stereo imagery
[J].
3D change detection inside urban areas using different digital surface models
[J].
Investigation on automatic change detection using pixel-changes and DSM-changes with ALOS-PRISM triplet images
[J].
Object-based analysis of airborne LiDAR data for building change detection
[J].
结合LiDAR点云和航空影像的建筑物三维变化检测
[J].
3D building change detection by combining LiDAR point clouds and aerial imagery
[J].
基于UAV影像密集匹配点云多层次分割的建筑物层高变化检测
[J].
3D change detection of buildings based on multi-level segmentation of dense matching point clouds from UAV images
[J].
Building change detection based on satellite stereo imagery and digital surface models
[J].
Building change detection from bi-temporal dense-matching point clouds and aerial images
[J].
Building change detection based on 3D co-segmentation using satellite stereo imagery
[J].
顾及地理空间信息的无人机影像匹配像对提取方法
[J].
A method for extracting match pairs of UAV images considering geospatial information
[J].
An easy-to-use airborne LiDAR data filtering method based on cloth simulation
[J].
Verification of color vegetation indices for automated crop imaging applications
[J].

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}