

0 引言
实时、准确地提取林木结构参数是了解陆地碳储量及生态系统健康诊断的关键[1],其中树冠体积表达了林木冠层所占几何空间大小,其值能综合反映树木群体间的竞争程度及林木光合作用强度,是林木三维形态模拟[2]、森林资源调查[3]和地上生物量估算[4]等研究的重要因子。传统的单木树冠体积获取方法主要采用钢卷尺和测高仪等测量工具,通过人工获取冠幅、冠高并根据特定树种的经验模型进行计算得到,该方法技术粗放且测量精度受限于人为因素及林木冠层形态,无法满足林木参数提取的准确性和高效性要求[5-6]。地基激光雷达测量技术(terrestrial light detection and ranging system,TLS)采用非接触激光测量方式,快速获取高精度、高密度的林木三维空间结构信息——点云数据,具有扫描速度快、自动化程度高的优势,为林木树冠体积提取开辟了新技术思路[7-8]。因此,开展基于激光点云数据的单木树冠体积提取研究具有重要的理论意义和工程参考价值。
根据最小微分单元的空间尺度不同,激光点云单木树冠提取方法可划分为3类: ①基于点云边界检测的树冠体积提取法[9]。通过将林木冠层视为空间边界连续的不规则几何体,检测三维空间点云轮廓边界点并构建树冠表面不规则空间三角网络或凸包集合,直接计算封闭的三角网空间体积进而得到树冠体积,如三维凸包提取法[10-11]和空间三角网提取法[12]。该方法较完整地表达树冠的空间范围,能较好地顾及不同树种树冠空间形态分布的差异性,但树冠轮廓边界点云检测及空间三角网重构,增加了树冠体积提取过程的复杂度,不利于大范围推广和使用,同时边界点缺失、点云密度不均匀等因素使得树冠轮廓三角网的合理性有待商榷。②基于点云分层的树冠体积提取法[13-14]。将激光点云沿冠层高度均匀划分为若干分层,把各分层视为底面不规则的空间圆台,采用α-shape算法检测底面边界并计算面积,通过各分层体积累计估算树冠体积。该方法将局部树冠形态等效为规则棱台模型,降低了树冠体积提取的复杂度,但分层分割尺度选择降低了树冠体积提取的自动化程度。部分学者尝试从最优分割尺度设置及改进α-shape算法的分层底面边界点检测等方面入手[15],在一定程度上提高了激光点云树冠提取的自适应程度和精度。③基于点云体素分割的树冠体积提取法[16-17],主要根据冠层空间形态分布,将树冠激光点云均匀分割为
基于此,提出了一种地基激光点云单木树冠体积精细提取法,该方法将激光点云投影至三维球坐标空间,通过建立无序点云的三维网格化组织,提高了点云空间中树冠体积微元分割的效率; 通过将树冠切割为若干大小相等的锥体微元,有效解决了树冠边界点云检测精度不足的技术难题,同时能较好地顾及点云密度、冠层缝隙等因素,具有提取精度高、稳定性好的优势。
1 原理与方法
自然状态中,单木树冠以树干为中心向空间延伸,在点云空间中树冠外轮廓表现为边界封闭的不规则空间体,但局部范围则可视为规则的球形曲面。若将冠层激光点云由三维直角坐标空间转换为三维球坐标空间,并将树冠冠层切割为若干个彼此紧密相连的锥形单元微元体,则树冠冠层体积可由锥形微元体积分得到。根据以上分析,提出了一种激光点云单木树冠体积提取球坐标积分法,主要技术流程如图1所示。
图1
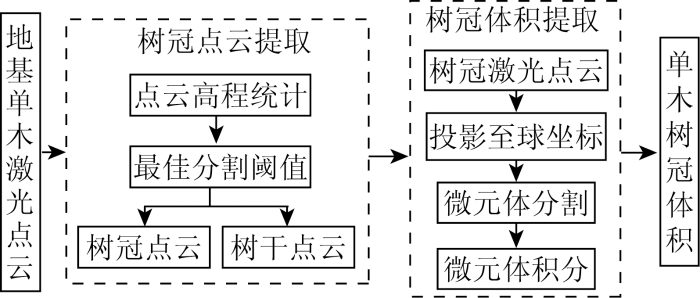
图1
地基激光点云树冠体积提取主要技术流程
Fig.1
Technical process of extracting crown volume from TLS point cloud
首先,对单木激光点云进行高程分布统计,并采用可视化高程阈值分割法提取冠层激光点云; 然后,定义球坐标系,将单木冠层激光点云投影至三维球坐标空间; 最后,沿水平角和竖直角将单木冠层等分切割为若干锥形体微元,通过锥形体微元积分得到单木树冠体积。微元体切割过程能较好地表达树冠轮廓局部范围的空间分布特性,微元体积分过程较好地解决了树冠轮廓整体范围不规则性描述,该方法从理论上具有很好的可行性和可靠性。
1.1 树冠点云提取
通常情况下,单体树木由树干和树冠组成且空间形态呈“伞”字型分布,在点云空间中,树冠点高程大于树干点高程,可设置高程阈值并取高程值大于阈值的点为树冠点云。为减少阈值设置不合理导致的错分或漏分,设计了一种可视化最佳高程阈值选择方案: 对单木激光点云进行高程分布统计并绘制高程-点云数量分布曲线,如图2(a)所示。沿高程值增大方向,高程-点云数量分布曲线呈先增大后减小的变化趋势,此时曲线变化的拐点对应树冠和树干的连接点,则该拐点对应的高程值即为树冠点云提取的最佳高程分割阈值。图2(b)展示了基于可视化最佳高程阈值分割的树冠点云提取结果,其中绿色点为树干点,蓝色点为树冠点,此时最佳高程阈值
图2
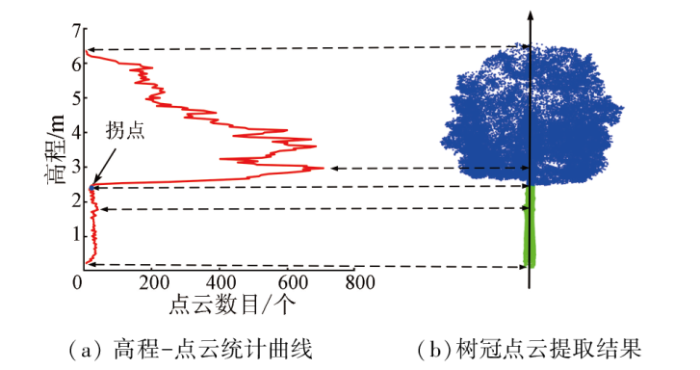
图2
可视化最佳高程阈值分割的树冠提取
Fig.2
Visualization of optimal elevation threshold segmentation for crown extraction
1.2 树冠体积提取
基于激光点云的单木树冠体积提取球坐标积分法主要包括球坐标投影变换、树冠微元体分割、树冠体积提取3个步骤。
1)球坐标投影变换。球坐标系是利用球坐标表示空间点位置的三维正交坐标系,可用球半径、竖直角和水平角3个维度表达,其中球半径描述了球面点至球心的空间距离; 水平角描述了球面点所在铅垂面相对起始参考面的夹角; 竖直角描述了球面点和球心连线与铅垂线的夹角。为了更加准确描述树冠空间形态分布特性,对树冠点云球坐标系定义如下: 取树冠点云重心为三维球坐标系原点
式中:
图3
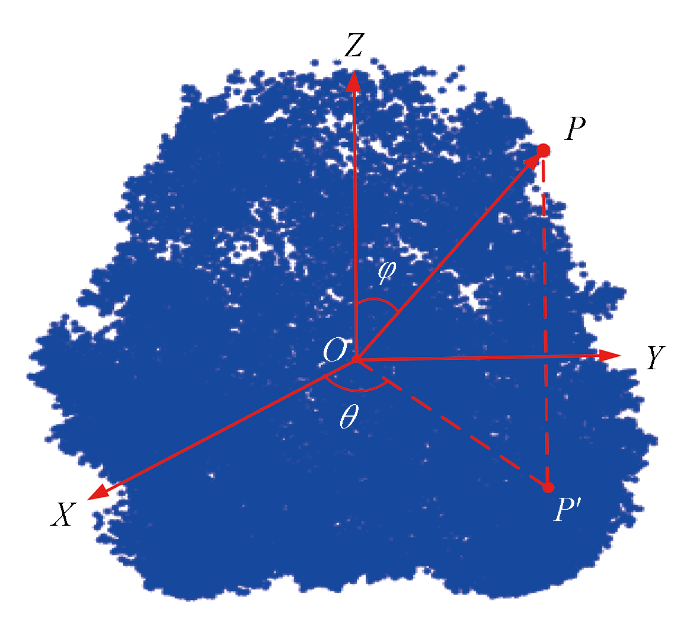
将树冠激光点云去重心化,则任意点
式中: 水平角
2)树冠微元体分割。在三维球坐标空间内,将树冠点云沿水平方向和竖直方向进行等角度切割,
式中dL1和dL2为微元体底面边长。
图4
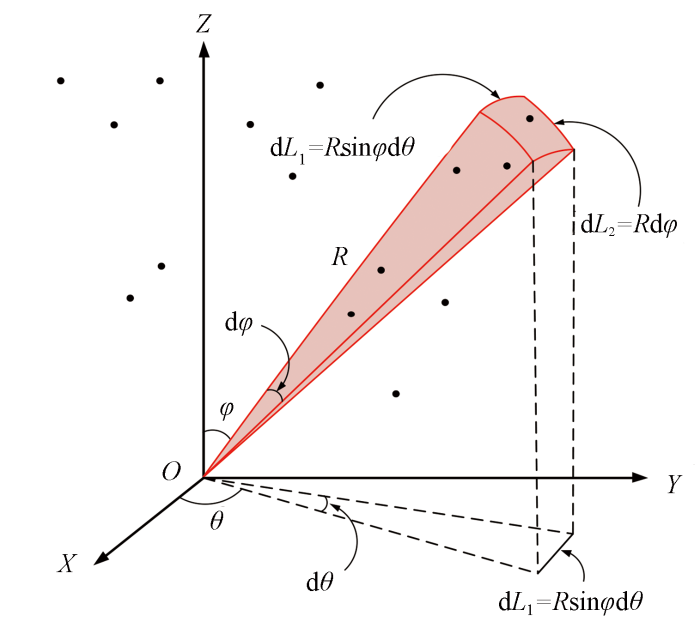
3)树冠体积提取。以空间球体为树冠冠层表面局部形状描述的理论模型,根据三维空间球体积积分原理,树冠冠层体积计算模型为:
由于局部范围锥形体微元半径
本文提出的激光点云单木树冠体积提取球坐标积分法以激光点云和角度分辨率为参数输入,单木树冠体积为结果输出,其中角度分辨率为主要输入参数,其大小将直接影响单木树冠提取的精度和效率。取值过大则会忽略树冠局部边界分布的差异性,使得单木树冠体积提取结果偏大; 取值过小则导致微元切割过细,使得激光点云单木树冠体积提取效率降低。综合单木树冠提取精度和效率因素,水平方向和竖直方向切割的角度分辨率取值相等
式中:
1.3 精度评定
由于单木树冠轮廓是无规则空间体,其整体空间形态无法用数学模型精细描述,因此无法直接确定树冠体积的理论值。韦雪花等[17]提出了基于体素分割的激光点云树冠体积提取方法,采用多组实验数据分析了算法的有效性和可靠性,并讨论了体元大小选择对树冠体积提取精度和效率的影响,表明体元越小树冠提取精度越高,已成为激光点云数据树冠体积提取性能评价的标准参考。本文以前述激光点云树冠体积提取体素分割法为基础,体素大小取值0.05 m时估算结果为树冠体积大小的理论参考。选择绝对误差和相对误差为树冠体积提取精度评定指标,计算公式分别为:
式中:
2 实验与分析
2.1 实验数据
徕卡P40地基激光雷达系统为激光点云数据获取设备,主要参数: 测距精度为1.2 mm±10-5; 测角精度为8″; 点位精度为3 mm@50 m; 扫描速率为100万点/s; 水平和垂直方向视场角分别为360°和270°。数据采集采用多站式扫描方案,即以研究对象为中心周围均匀布设3个扫描测站,同时在3个测站公共可视区域安置平面靶标,利用徕卡商业软件Cyclone多站点云数据配准、去噪和裁剪等预处理功能模块得到的单木激光点云为最终实验数据,其中相邻2站激光点云配准最大误差为0.09 m。选择桂花、雪松、香樟、滇朴、银杏和樱花6种不同树种、树冠形态单体树木作为研究对象,研究对象点云如图5所示。
图5
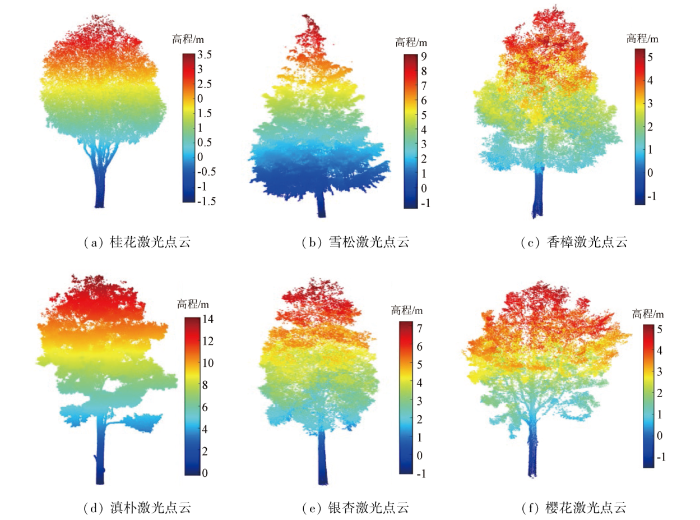
所选6组地基激光点云实验数据具有不同的激光点云平均距离、点云数量和单体树木高度,分别代表了空间球体、空间三棱锥、空间椭球体、空间圆柱体和空间倒三棱锥5种不同的树冠空间形态,在城市绿地资源调查及碳储量等工程研究中具有普遍代表性,能满足本文单木树冠体积提取球坐标积分法可行性和可靠性分析的实验数据要求,实验数据激光点云基本信息如表1所示。
表1 实验数据基本信息统计
Tab.1
| 实验数据 | 高度/m | 点云数 | 点间距/m | 树冠形态描述 |
|---|---|---|---|---|
| 桂花点云 | 5.03 | 54 557 | 0.011 | 空间球体,轮廓规则,侧视“O”型 |
| 雪松点云 | 10.58 | 127 976 | 0.015 | 三棱锥,轮廓规则,侧视倒“V”型 |
| 香樟点云 | 6.73 | 46 926 | 0.023 | 空间椭球,轮廓规则,侧视“O”型 |
| 滇朴点云 | 14.46 | 287 145 | 0.012 | 圆柱体,轮廓极不规则,侧视“X”型 |
| 银杏点云 | 8.28 | 39 667 | 0.026 | 三棱锥,轮廓较规则,侧视倒“V”型 |
| 樱花点云 | 6.66 | 36 834 | 0.022 | 三棱锥,轮廓极不规则,侧视“V”型 |
2.2 结果与分析
树冠形态多样且结构复杂,人工测量实测方法粗放,目前尚未明确树冠准确值测量方法。前人选择45棵单木地基激光点云数据讨论并分析了体元分割树冠提取法的有效性,结果表明当树冠冠径与体元边长的比值取10时,树冠提取结果准确、客观且稳定[17],本文选择该方法提取结果作为树冠体积提取精度评价的理论参考值。将本文球坐标积分法与点云边界检测的树冠体积提取法[10]和点云分层的树冠体积提取法[13]这2种方法进行对比,表2显示了基于不同方法的实验数据激光点云树冠体积提取值及精度统计。对比不同的激光点云实验数据,当树冠空间形态呈类球形或三棱锥形且轮廓较规则时,如桂花、雪松和香樟试验数据,不同方法树冠体积提取均表现出较好的效果,实验数据的树冠体积提取精度指标保持在一定范围内,树冠体积提取绝对误差的最大值为1.02 m3,相对误差的最大值为7.32%,如表中加粗所示; 当树冠轮廓不规则时,如滇朴、银杏等试验数据,实验数据树冠体积提取精度指标波动较大,以滇朴激光点云的实验数据提取结果表现最为明显,其绝对误差最大值为3.46 m3。对比不同的激光点云树冠体积提取方法,基于本文方法的树冠提取绝对误差绝对值最大值为2.33 m3,相对误差最大值为3.40%,具有较高的提取精度,且对不同树冠形态、树种类型保持较好的适用性。分析原因为点云边界检测的树冠体积提取法通过检测树冠边界点并生成三维凸包,较好顾及了树冠外部轮廓的不规则性,但当树冠形态出现较大“突刺”时,不合理的凸包使得树冠体积提取结果失真; 点云分层的树冠体积提取法通过将树冠切割为若干个断层,并将断层视为规则圆台,其树冠体积计算仅仅考虑断层采样面形态,没有顾及2采样面之间树冠空间特性,使得呈椭圆形树冠体积结果偏小,不规则形状树冠体积提取结果偏大; 本文方法通过将离散三维激光点云投影至三维球坐标空间,并把树冠冠层切割成若干各锥形微元体,更能精细描述树冠边轮廓的差异性,通过在球坐标空间中对微元体积分,较好顾及了点云内部缺失、树冠形态差异等因素,表现出较高的提取精度和普适性。
表2 激光点云树冠体积提取及精度分析
Tab.2
| 实验数据 | 参考值 | 点云边界检测法 | 点云分层法 | 本文方法 | ||||||
|---|---|---|---|---|---|---|---|---|---|---|
| 提取 结果/m3 | 提取 结果/m3 | 绝对 误差/m3 | 相对 误差/% | 提取 结果/m3 | 绝对 误差/m3 | 相对 误差/% | 提取 结果/m3 | 绝对 误差/m3 | 相对 误差/% | |
| 桂花点云 | 12.96 | 13.17 | 0.21 | 1.62 | 12.12 | -0.84 | 6.48 | 13.19 | 0.23 | 1.77 |
| 雪松点云 | 36.49 | 35.73 | -0.76 | 2.08 | 37.51 | 1.02 | 2.80 | 36.04 | -0.45 | 1.23 |
| 香樟点云 | 13.26 | 13.87 | 0.61 | 4.60 | 12.29 | -0.97 | 7.32 | 13.42 | 0.16 | 1.21 |
| 滇朴点云 | 68.51 | 65.32 | -3.19 | 4.66 | 71.97 | 3.46 | 5.05 | 66.18 | -2.33 | 3.40 |
| 银杏点云 | 22.27 | 20.37 | -1.9 | 8.53 | 21.77 | -0.5 | 2.25 | 22.63 | 0.36 | 1.62 |
| 樱花点云 | 7.48 | 7.12 | -0.36 | 4.81 | 8.39 | 0.91 | 12.17 | 7.27 | -0.21 | 2.81 |
图6展示了基于本文方法和已有方法的实验数据树冠体积提取结果精度评定指标分布曲线。针对不同的树冠激光点云实验数据,本文方法的树冠提取绝对误差和相对误差分布曲线变化较为平缓,且精度指标分布在一定的范围内,分析表明基于本文方法的激光点云单木树冠提取方法具有稳定性高的优势。
图6
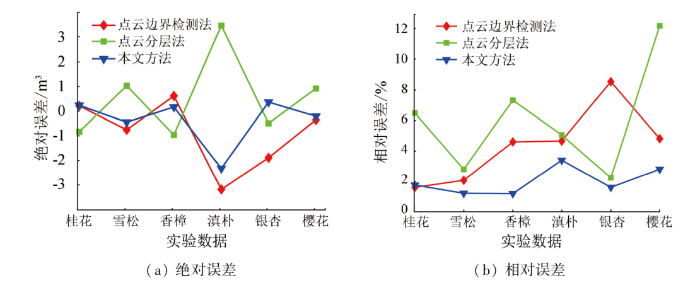
图6
树冠提取结果精度指标分布曲线
Fig.6
Precision index distribution curve of crown extraction results
3 结论
树冠体积是森林调查、林业资源监测和管理的关键指标参数。针对激光点云树冠体积提取方法普适性不高等不足,在分析了单木结构的基础上,提出了一种地基激光点云单木树冠体积提取球坐标积分法。选择多组地基激光点云数据实验,涉及点云密度、树冠形态及树种等因素,通过与点云边界检测法和点云分层法2种已有激光点云树冠体积提取方法进行对比,实验结果与分析表明: 本文方法将激光点云投影至三维球坐标空间,改变了无序点云分层、边界检测等传统方法树冠体积提取思想; 通过将树冠轮廓局部范围视为球面模型,设计了基于锥形微元体的树冠体积计算球坐标积分策略,较好地顾及了点云内部缺失、树冠轮廓形态不规则、林木生长差异等因素,相比已有其他方法具有更好的树冠提取准确性和稳定性,单木树冠体积提取绝对误差绝对值最大值为2.33 m3,相对误差最大值为3.40%。
本文所采用的实验数据在林木生长监测、森林资源调查等林业工程应用中具有普遍代表性,但实际应用激光点云数据还包括点云数据缺失、点云密度严重失调等问题,本文方法的适应性和有效性还有待深入讨论,也是后续研究关注的重点。
参考文献
Canopy closure estimation in a temperate forest using airborne LiDAR and Landsat ETM+ data
[J].
林木多样性模型及生长模拟
[J].
DOI:10.12082/dqxxkx.2018.180101
[本文引用: 1]

林木生存环境复杂多变,导致林木形态千差万别,为了准确描述林木的形态多样性特征,提出了一种基于模型分解的林木生长模拟方法。首先构建多样性林木三维模型,使用林木形态的实际测量数据,基于B样条函数约束树干、树冠形态,依据削度方程模拟树干直径的变化趋势,利用Direct3D实现林木形态的三维建模;其次,按林木形态特征进行林木模型分解,将林木模型分为9个子模型;最后,使用场景节点按照拓扑结构关系对子模型进行动态组织,基于胸径、树高、枝下高、冠高和冠幅生长模型,使用多核CPU多线程并行的计算方式,获得各年龄阶段林木东、南、西、北方向形态参数,从而对子模型生长状态进行控制,实现林木不同方向生长变化的可视化模拟。结果表明:该方法可将林木三维模型与生长模型紧密结合起来,林木各方向的枝下高、冠高和冠幅严格按照生长模型进行生长,可有效模拟出林木各方向生长状态的多样性;三维场景渲染帧率(FPS)保持在25以上,平均FPS可以达到50,实现林木生长的方向异质性模拟。
Diversity model and growth si-mulation of tree
[J].
Comparative analysis of new forest resources survey methods
[J].
Deriving airborne laser scanning based computational canopy volume for forest biomass and allometry studies
[J].
基于无人机倾斜航空影像的树冠体积测算方法
[J].
Tree crown volume measurement method based on oblique aerial images of UAV
[J].
Assessing tree crown volume:A review
[J].
Comparison of aboveground biomass estimation from InSAR and LiDAR canopy height models in tropical forests
[J].
基于改进Delaunay算法的树冠三维重构单木因子提取
[J].
Amended delaunay algorithm for single tree factor extraction using 3-D crown modeling
[J].
From TLS to VLS:Biomass estimation at individual tree level
[J].
基于三维激光点云数据的树冠体积估算研究
[J].
Estimation of tree crown volume based on 3D laser point clouds data
[J].
Estimation of tree crown volume from airborne LiDAR data using computational geometry
[J].
A concave hull methodology for calculating the crown volume of individual trees based on vehicle-borne LiDAR data
[J].
三维激光扫描数据的单木树冠体积精确计算
[J].
Accurate calculation of single-tree crown volume based on 3D laser scanning data
[J].
Individual tree crown modeling and change detection from airborne LiDAR data
[J].
基于改进α-shape算法的三维点云树冠体积计算方法
[J].
Calculation method of 3D point cloud canopy volume based on improved α-shape algorithm
[J].
A high-resolution approach for the spatiotemporal analysis of forest canopy space using terrestrial laser scanning data
[J].
DOI:10.1002/ece3.4193
PMID:30038776
[本文引用: 1]
Forest canopies and tree crown structures are of high ecological importance. Measuring canopies and crowns by direct inventory methods is time-consuming and of limited accuracy. High-resolution inventory tools, in particular terrestrial laser scanning (TLS), is able to overcome these limitations and obtain three-dimensional (3D) structural information about the canopy with a very high level of detail. The main objective of this study was to introduce a novel method to analyze spatiotemporal dynamics in canopy occupancy at the individual tree and local neighborhood level using high-resolution 3D TLS data. For the analyses, a voxel grid approach was applied. The tree crowns were modeled through the combination of two approaches: the encasement of all crown points with a 3D α-shape, which was then converted into a voxel grid, and the direct voxelization of the crown points. We show that canopy occupancy at individual tree level can be quantified as the crown volume occupied only by the respective tree or shared with neighboring trees. At the local neighborhood level, our method enables the precise determination of the extent of canopy space filling, the identification of tree-tree interactions, and the analysis of complementary space use. Using multitemporal TLS data recordings, this method allows the precise detection and quantification of changes in canopy occupancy through time. The method is applicable to a wide range of investigations in forest ecology research, including the study of tree diversity effects on forest productivity or growing space analyses for optimal tree growth. Due to the high accuracy of this novel method, it facilitates the precise analyses even of highly plastic individual tree crowns and, thus, the realistic representation of forest canopies. Moreover, our voxel grid framework is flexible enough to allow for the inclusion of further biotic and abiotic variables relevant to complex analyses of forest canopy dynamics.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}