{kind=link}
{kind=link}
基于精密单点定位的ADS40 POS数据处理方法研究
引用本文
刘萍, 杨辽, 朱长明, 李宝明. 基于精密单点定位的ADS40 POS数据处理方法研究[J]. 国土资源遥感, 2010,22(2): 41-44
LIU Ping, YANG Liao, ZHU Chang-Ming, LI Bao-Ming. An Approach to the ADS40 POS Data Processing Method Based on Precise Point Positioning[J]. REMOTE SENSING FOR LAND & RESOURCES,2010,22(2): 41-44
Permissions
LIU Ping, YANG Liao, ZHU Chang-Ming, LI Bao-Ming. An Approach to the ADS40 POS Data Processing Method Based on Precise Point Positioning[J]. REMOTE SENSING FOR LAND & RESOURCES,2010,22(2): 41-44
Copyright©2010, 《国土资源遥感》编辑部
《国土资源遥感》编辑部
基于精密单点定位的ADS40 POS数据处理方法研究
第一作者简介: 刘 萍(1985-),女,硕士研究生,研究方向为摄影测量与遥感。
摘要
首先采用精密单点定位(PPP)对POS系统中的GPS数据进行解算,以提高GPS定位精度,然后将处理结果应用到POS辅助空中三角测量,并与传统的DGPS解算结果进行比较。实验表明: 采用PPP解算结果进行POS辅助空中三角测量,其测图精度可以满足国家标准对1:2 000地形图航空摄影测量内业规范的精度要求,一定程度上解决了无基站情况下的POS数据定位问题。
关键词:
精密单点定位; 差分GPS; POS; 空中三角测量
中图分类号:TP75
文献标志码:A
文章编号:1001-070X(2010)02-0041-04
An Approach to the ADS40 POS Data Processing Method Based on Precise Point Positioning
Abstract
POS (Position and Orientation System) provides position and attitude information during aerial photography. There must be at least one reference GPS base station for traditional differential GPS (DGPS) positioning, and the establishment of a GPS station would be a very costly and difficult task in some areas. GPS Precise Point Positioning (PPP) has been advanced as a way to avoid the use of the GPS base station. This paper describes the approaches to the processing of an actual aerial photographic data by using both kinds of GPS positioning methods. The final results of the POS-supported aerial triangulation from PPP are compared with those from DGPS solution. The empirical results suggest that the accuracy of POS-supported aerial triangulation from PPP can satisfy the 1:2 000 topographic map specifications for aerophotogrammetric office operation. It is feasible to process the POS data of ADS40 without a GPS Base Station by using Precise Point Positioning.
Keyword:
Precise point positioning (PPP); Differential GPS positioning; POS; Aerial triangulation
0 引言
ADS40三线阵推扫式传感器采用了集成GPS/IMU的POS(Position and Orientation System)系统来进行定位定姿, 因而可大幅减少外业控制点采集的工作量, 这一作业方式适用于缺少地面控制点的无图区以及西部测图困难地区的航摄资料采集。传统的差分GPS定位模式需要设立一定密度的GPS地面基站, 这会在测图困难地区增加工作难度。精密单点定位技术的提出及相应软件的开发和应用正在改变传统的GPS作业方式, 无基站的GPS定位技术逐渐成为研究热点。Zumberge等人证明单机静态观测数据可达到平面毫米级、高程厘米级的定位结果[1], 动态数据单点定位的结果也可达到相应多基站差分定位的亚分米级精度水平[2]。
本文通过精密单点定位(Precise Point Positioning, PPP)技术对一组高分辨率ADS40的POS数据进行处理, 然后应用到POS辅助空中三角测量, 并与传统的GPS差分方法取得的定位结果对比, 最后采用国家标准对1:2 000地形图航空摄影测量内业规范进行精度验证。试验表明, 采用无基站的PPP方法对ADS40的POS数据进行后处理作业, 能够满足现行规范的要求。
1 POS及其定位原理
ADS40装配有Applanix的POS/AV510系统, 包括惯性测量装置IMU和卫星导航定位系统GPS。IMU是一套完全自成一体的装置, 用陀螺仪和加速度计提供的测量数据记录运载体在参考坐标系中每一时刻的位置和姿态, 其系统噪声相对较低, 但是却存在随时间漂移的缺点[5]; GPS系统则可以提供空间位置信息, 虽然其动态性能较差, 采样频率偏低, 位置估值噪声相对较大, 却不会产生漂移误差。因此两者的误差特性截然不同, 其系统测量值是互补的。POS系统同时记录两者的测量值, 能够很好地将其优势结合起来。
由于GPS接收的卫星信号会受到多方面因素的影响, 一个独立式的GPS在全世界范围内通常可以获得优于10 m(95%)的定位精度和20 ns(95%)的授时精度[6], 但是这样的精度不能满足航测工程的精度要求, 因此, 需要在数据处理过程中采取GPS定位技术增强数据的精度。传统办法是采用差分GPS(Differential GPS, DGPS)的定位模式, 其改正原理是基于GPS误差源在空间和时间上的高度相关性, 航摄仪与基准站的距离通常在布设方案中小于50 km, 这种情况下, 航摄仪和基准站对于可见卫星的伪距和载波相位测量值的误差基本相当。利用一个或多个已知位置的基准站对测量值中存在的误差进行估计, 并以此作为校正值对航摄仪POS系统的GPS数据精度进行增强。这就是测区必须布设一定密度基站的原因。而PPP利用IGS(International GPS Service)提供的卫星精密星历和精密钟差产品, 可以实现无基站高精度定位。
2 研究方法
2.1 精密单点定位(PPP)
精密单点定位技术的思路为利用IGS提供的GPS精密星历和钟差改正数据, 通过建立物理模型, 以无电离层影响的载波相位和伪距组合观测值为观测资料, 对测站位置、接收机钟差、对流层天顶延迟以及组合后的相位模糊度等参数进行估计[1], 用户利用单台GPS双频双码接收机的观测数据在数千平方公里乃至全球范围内的任意位置都可以实现实时的或事后的高精度定位[4]。PPP通常采用双频无电离层组合观测, 其观测方程如下[7]:
式中, lp为双频GPS的无电离层伪距组合观测值; lφ 为无电离层相位组合观测值(距离); dt为地面GPS接收机钟差; dT为GPS卫星钟差; C为真空中的光速; Tr为信号的对流层延迟; λ 为组合相位; N为无电离层的组合相位模糊度观测值; ε P、ε ϕ 分别为两种组合观测值的观测噪声和多路径误差; ρ 为测站(x, y, z)和GPS卫星(XS, YS, ZS)间的几何距离, 即
将式(1)中的两方程式线性化可得观测误差方程, 即
V=Aδ X+W(3)
式中, A为设计矩阵; δ X为待估参数, 包括测站坐标、接收机钟差、无电离层组合模糊度及对流层天顶延迟改正等参数; W为残差项。
2.2 基于PPP的POS解算
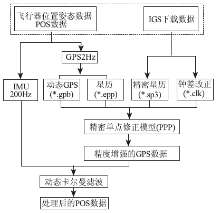
笔者在数据地面后处理的作业中, 将采用Applanix的POSPac对机载POS数据进行处理。POS数据主要由IMU和GPS以及辅助的卫星星历和时间数据组成, 其中IMU的频率为200 Hz, GPS的采样频率仅为2 Hz, 所记录的是GPS天线中心的位置(X, Y, Z)。进行PPP处理前要先根据机载动态GPS数据选择下载IGS提供的时延为12 d的事后精密星历和精密卫星钟差产品(对于急需处理且对数据精度要求稍低的用户可采用时延仅1 d的快速精密星历和快速卫星钟差), 以此作为代入参数, 采用合适的精密单点定位修正模型进行处理, 对GPS轨迹文件进行双向解算得最优路径。然后把经过精度增强的GPS数据与IMU数据采用动态卡尔曼滤波进行处理, 利用GPS数据来对IMU随时间累积的漂移误差进行改正, 用高采样频率的IMU来内插出GPS采样间隔扫描线的外方位元素。详细工作流程如图1所示。
 | 图1 基于PPP的POS数据处理流程Fig.1 POS data processing workflow based on PPP |
POS数据中的IMU与GPS的获取时间同影像中每条扫描线的成像时间将通过同步电钟的时间进行严格对应, 以此来获取针对每条扫描线上各个像主点的6个外方位元素: 采样瞬间像主点的WGS84大地坐标(B, L, H)和IMU相对局地水平坐标系的翻滚ω 、俯仰φ 、航偏κ 角度信息。
3 实验与结果分析
3.1 实验数据
文中的实验数据为2008年9月11日ADS40于山西贺西煤矿的实际航飞数据。该测区位于UTM 49N分带, 地形主要为丘陵和山地, 测区高程范围为817~1 300 m; 地面分辨率0.24 m, 拟成图比例尺为1:2 000, 测区四角选取4个平高点。为消除坐标转化造成的精度影响, 处理过程中无坐标转化, POS数据及平高点均采用ITRF97框架下的WGS84坐标系, IGS所提供产品的坐标系统是基于ITRF2000框架的WGS84, ITRF97同ITRF2000相互之间可无需系统修正相互替换。ADS40的GPS接收机为NovAtel OEM4, 地面布设一个装配Leica 1200双频动态接收机的GPS基准站进行静态长时间连续工作。整个飞行作业期间GPS数据质量符合要求, 卫星数量均在7颗以上, 无信号失锁, 全程DOP值最大为4.85, 绝大部分位于3以下。
3.2 结果分析
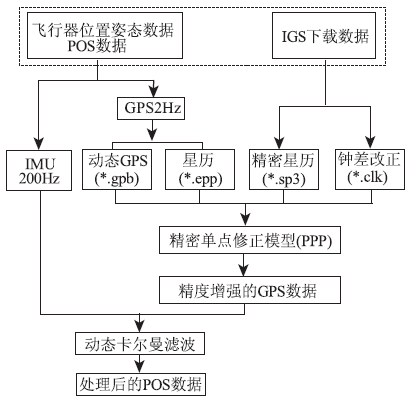
对GPS数据采用PPP算法以飞行方向为准分别进行顺向和逆向双向解算, 并对其结果进行联合估算以选择最优航线。为便于精度评估, 对该数据亦采用地面基站的接收数据进行DGPS解算, 两种算法定位的标准偏差如图2所示。
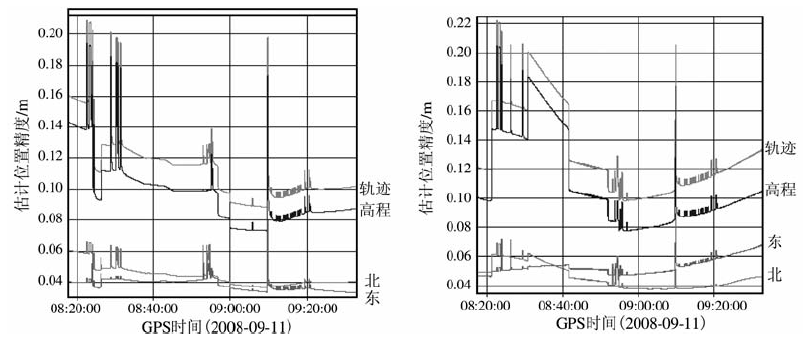 | 图2 DGPS的估计位置精度(左)及PPP的估计位置精度(右)Fig.2 Estimated standard deviation of DGPS (left) and estimated standard deviation of PPP (right) |
从图2可以看出, 测区内DGPS所得结果中所有历元的定位标准偏差值都在0.21 m以内, 最大值为0.208 7 m, 最小值为0.033 1 m, PPP中最大值为0.221 5 m。经统计, DGPS在东、北、高程3个方向上的均方根误差分别为0.038 5、0.044 8和0.100 0, PPP相应的RMS为0.053 6、0.046 6和0.114 3。DGPS的解算精度略优于PPP解算精度, 但二者差距很小, 这表示PPP在动态定位中的理论精度可以达到和DGPS相当的分米级水平。
将两种解算方法得到的POS数据分别采用同样的4个四角平高点布控来进行空中三角测量。由于外方位元素的高频变化, 传统面阵航摄仪采用的基于共线方程的区域网平差办法并不适于线阵传感器。本实验中的ADS40影像数据和POS数据将采用软件ORIMA中改进的线性定向片内插模型来进行POS辅助空中三角测量。加密结果如表1所示。
| 表1 带四角控制的POS辅助空中三角测量精度 Tab.1 The accuracy of POS-supported aerotriangulation with 4 ground control points in the corners |
由表1数据可以看出, 该实验中PPP定位可以取得同DGPS相当的平面位置精度, 但高程精度方面DGPS要优于PPP, 基站的设立在提高高程精度方面能够起到一定的作用。但是采用两种定位方法, 加密点的检查精度都能够满足我国规范对于1:2 000比例尺地形测图航测内业的要求: 内业加密对最近野外控制点的图上点位中误差≤ 0.4 mm(图上), 高程最大误差≤ 0.7 m, 中误差≤ 0.35 m[8]。
4 结语
本文提出了应用无基站定位的PPP技术提高POS的定位精度, 然后将POS解算结果应用于空三加密。实验以一组实测大比例尺航摄数据进行处理和分析, 结果证明: PPP的定位结果在内符合精度上可以达到同DGPS相当的精度水平; 在测区插入4个平高点进行POS数据辅助空中三角测量以后, 加密点定位精度可以满足1:2 000地形图成图的国家内业规范。这表明, 在无法设置地面基站的情况下, 采用PPP技术, 通过POS辅助空中三角测量, 能够满足大比例尺航摄作业的精度要求。
The authors have declared that no competing interests exist.
参考文献
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|