
{kind=link}
{kind=link}
基于中巴02B星遥感数据的油菜识别技术研究
引用本文
钟仕全, 陈燕丽, 莫建飞, 陈玉兰. 基于中巴02B星遥感数据的油菜识别技术研究[J]. 国土资源遥感, 2010,22(2): 77-79
ZHONG Shi-quan, CHEN Yan-li, MO Jian-fei, CHEN Yu-lan. Cole Feature Extraction from CBERS-02B Remote Sensing Images[J]. REMOTE SENSING FOR LAND & RESOURCES,2010,22(2): 77-79
Permissions
ZHONG Shi-quan, CHEN Yan-li, MO Jian-fei, CHEN Yu-lan. Cole Feature Extraction from CBERS-02B Remote Sensing Images[J]. REMOTE SENSING FOR LAND & RESOURCES,2010,22(2): 77-79
Copyright©2010, 《国土资源遥感》编辑部
《国土资源遥感》编辑部
基于中巴02B星遥感数据的油菜识别技术研究
第一作者简介: 钟仕全(1964-),男,高级工程师,主要从事遥感应用研究工作。
摘要
利用中巴02B星遥感资料,采用光谱分析法分析油菜作物的光谱反射特性,建立油菜作物遥感信息识别模型,并利用该模型对云南省罗平县油菜作物进行信息提取研究。结果表明,该油菜作物识别技术可为了解我国油菜种植情况、进行长势监测和产量估测提供技术参考。
关键词:
中巴02B星; 油菜; 遥感识别
中图分类号:TP75
文献标志码:A
文章编号:1001-070X(2010)02-0077-03
Cole Feature Extraction from CBERS-02B Remote Sensing Images
Abstract
CEBRS-02B launched successfully on September 19, 2007 by China is a new earth resource satellite. The satellite remote sensing technology can play an important role in national economical construction. In order to improve the application of satellite remote sensing data in China, this satellite was used to extract the cole area in Luoping County of Yunnan Province so as to establish a reliable basis for the recognition of the cole area in Yunnan. Using the spectral analysis method, the authors analyzed the spectral reflectance properties of cole and then built a model for remote sensing cole feature extraction. The result shows that the extraction technique can provide references for condition monitoring and yield estimation.
Keyword:
CBERS-02B; Cole; Remote sensing identification
0 引言
中巴02B星于 2007年9月19日发射成功。星上有效载荷主要有5波段20 m分辨率CCD相机、2波段258 m分辨率宽视场成像仪(WFI)和分辨率为2.36 m的高分辨率相机(HR), 其中, CCD相机有效载荷的回归周期为26 d。利用中巴02B星遥感数据产品开展地物识别能力的研究, 对开发国产卫星遥感数据应用潜力有重要意义[1, 2, 3, 4]。
应用遥感技术为农业服务是当前农业高新技术产业化中最前沿的领域之一。通过分析遥感影像的光谱特征识别农作物, 是一种普遍而有效的方法。如美国耶鲁大学的Prasad S. Thenkabail[5]探索选择高光谱最佳窄波段来识别小麦、大麦、鹰嘴豆、小扁豆、野豌豆与孜然芹等6种农作物并提高了识别率。日本学者T.MURA KAM I等利用SPOT HRV影像图, 通过NDVI分析对日本佐贺平原的作物进行识别。国内曹卫彬等[6]采用TM影像数据研究开发了基于光谱特征的棉花识别模型; 还通过农作物物候历、地面光谱与实地调查分析研究, 实现了新疆棉花遥感监测识别区域的划分[7]。可见, 目前小麦、玉米、水稻和棉花的遥感识别技术已有应用, 且有些农作物遥感识别技术已较为成熟, 但利用中巴02B星进行油菜的遥感识别研究与应用并不多。
云南省罗平县是我国西南地区油菜生产基地县, 年播种油菜面积达2万多hm2, 油菜生产在带来油料经济效益的同时, 也为罗平的旅游开发带来了新的产业。每年2~3月份是油菜开花时节, 也是罗平旅游的好季节。本研究选择云南省罗平县为例, 以中巴02B星为遥感数据源, 采用遥感技术建立快速、准确的遥感图像油菜识别模型, 对油菜作物识别技术进行探索研究。
1 遥感数据预处理
本研究选用了中巴02B星CCD数据, 分别为B1(0.45~0.52 μ m)、B2(0.52~0.59 μ m)、B3(0.63~0.69 μ m)和B4(0.77~0.89 μ m), 成像日期为2008年2月24日。该数据由中国资源卫星应用中心提供, 为二级产品。
1.1 几何纠正
以经几何精纠正后分辨率为15 m的ETM遥感数据为参考图像, 对中巴02B星遥感数据进行几何纠正。采用人机交互式方法选择地面控制点(每景图像内均匀选取9个以上控制点), 利用二次多项式和最邻近内插法对中巴02B星图像进行几何精纠正, 经重新选点检验, 将误差控制在1个像元内。为了保持中巴02B星图像的高空间分辨率特性, 几何纠正前将ETM遥感数据重采样至19.6 m, 以便与中巴02B星数据空间分辨率相匹配。
1.2 假彩色合成
根据植被的光谱特征和中巴02B星CCD数据的特点, 采用B2(R)、B4(G)、B3(B)波段组合进行假彩色合成, 该组合较之真彩色图像的B3(R)、B2(G)、B1(B)波段组合更利于油菜的目视解译。
2 建立识别模型
2.1 光谱特征分析
遥感图像上主要有2种植被: 油菜和其他植被, 但二者所处的生长期不同。油菜从现蕾至初花称为现蕾抽薹期, 为营养生长和生殖生长并进时期, 一般在2月中旬至3月中旬。所获取的中巴02B星遥感图像成像时间为2月24日, 处于油菜的抽薹期, 此时的其他植被却刚开始返青。
此外, 裸地和水体的光谱反射曲线在某些波段与植被覆盖地区具有相似性, 因此在中巴02B星B2、B4、B3波段合成图像上选取油菜、其他植被、水体和裸地4类地物的典型样区, 分析各典型样区像元DN值的直方图分布特征(如图1所示)。
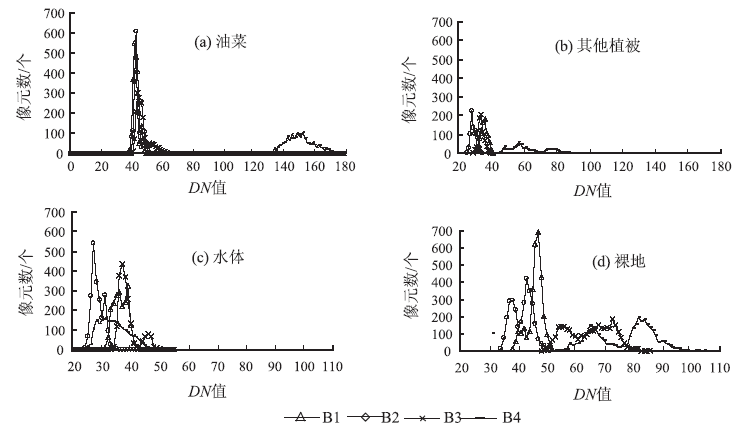 | 图1 罗平县中巴02B星图像不同地物各波段直方图统计Fig.1 Histogram statistics of CBERS-02B satellite bands of different objects in Luoping county |
由图1可以看出, 油菜与其他植被在近红外波段(B4)的反射特性有显著差异。油菜在该波段表现为高反射特性, 像元DN值均大于110, 分布集中, 且与其他波段没有交叉现象; 其他植被在近红外波段的高反射特性不如油菜明显, 像元DN值均小于110, 分布不集中, 与其他波段亦无交叉现象。水体与裸地在近红外波段像元DN值与其他波段均有交叉现象; 其中, 水体的近红外波段与B1、B2、B3波段均有交叉, 裸地的近红外波段仅与B3波段有交叉。
由于裸地与其他植被的像元DN值在近红外波段具有相近的区间分布, 因此仅利用近红外波段并不能对二者进行很好的区分; 另外, 虽然DN=110的阈值设定可在很大程度上区分油菜与其他植被, 但对于生长期处于抽薹期之前的油菜或返青较快的其他植被, 该阈值对二者的区分效果并不理想。由对各类地物的最大值、最小值、平均值统计(表1)可知, 利用红波段(B3)可以建立一个载体, 使得油菜在近红外波段的高反射特性得以突出, 即油菜在B4与B3波段的像元DN差值最大, 而其他地物在B4与B3波段的像元DN差值较小; 其中, 油菜在B4与B3波段像元DN平均值的差值为104; 其他植被为28; 裸地为12。
| 表1 罗平县中巴02B星图像各类地物最小/最大/均值统计 Tab.1 Min/Max/Mean Statistics of CBERS-02B satellite bands of different objects in Luoping county |
2.2 油菜识别模型
通过对地物的光谱特征分析, 确定了中巴02B星油菜识别的数学模型, 即差值植被指数模型(DVI):
DVI=B4-B3(1)
式中, B3、B4分别为中巴02B星的红波段和近红外波段亮度值。
为了验证DVI对罗平县油菜识别的有效性, 同时还确定了该研究区的归一化差值植被指数模型(NDVI)及比值植被指数模型(RVI), 并统计了3种模型的像元最大值、最小值和平均值(表2), 以分析比较各模型区分油菜的有效性。
| 表2 罗平县各类地物不同识别模型最小/最大/均值统计 Tab.2 Min/Max/Mean Statistics of different recognition model in Luoping county |
由表2可知, 对于模型NDVI而言, 油菜与其他植被、裸地均有交叉值, 交叉区间分别为: 0.37~0.39和0.37~0.61; 对于RVI而言, 油菜与裸地无交叉值, 但与其他植被有交叉值, 交叉区间为2.16~2.30; 但对于DVI, 油菜与其他植被及裸地均无交叉值。
3 遥感信息统计分析
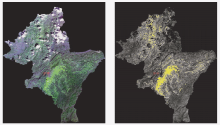
根据油菜识别模型DVI, 计算罗平县差值植被指数图像; 统计样区DVI值分布区间, 设定阈值, 对油菜进行提取。将提取的油菜区域与B2、B4、B3波段组合的假彩色图像进行叠加分析, 检验提取效果, 如不满意, 可修改阈值重新提取。试验提取结果如图2所示: 中巴02B星假彩色合成图中绿色区域为油菜(图2(左)); DVI图中黄色区域为油菜(图2(右))。
本次试验设定油菜DVI阈值为60~130, 提取出罗平县油菜面积为22 465.4 hm2(该面积不包括云覆盖部分)。
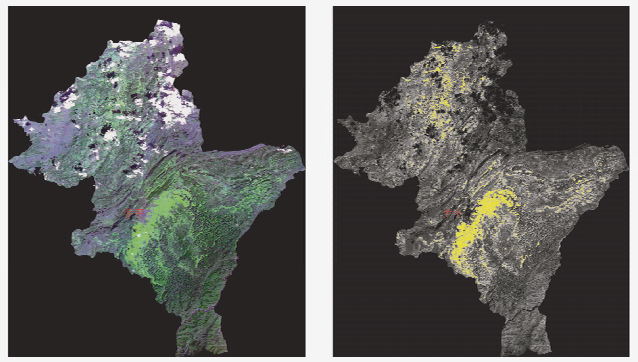 | 图2 罗平县中巴02B星B2、B4、B3波段假彩色合成图(左)与DVI油菜提取图(右)Fig.2 CBERS-02B satellite’ s false color image (left) and its cole extraction image using DVI model (right)in Luoping county |
4 结论
(1)根据油菜生长发育情况, 2~3月份为油菜的现蕾抽薹期, 油菜与其他植被有着明显不同的特征。在中巴02B星数据中, 油菜种植区在近红外波段(B4)的反射特性有显著差异。
(2)油菜在中巴02B星遥感数据的B4、B3波段像元DN平均值的差值明显高于其他植被和裸地, 为建立油菜识别模型提高了可靠依据。
(3)中巴02B星数据获取容易, 时效快, 使采用多时相中巴02B星遥感数据开展油菜长势动态监测成为可能。结合HR高分辨率全色波段数据可以提高油菜长势动态监测精度, 在开展油菜长势动态监测的基础上, 可以进行油菜种植面积和产量估算等方面的应用研究。
The authors have declared that no competing interests exist.
参考文献
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|