
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
面向对象的池塘养殖用海信息提取
[徐京萍 , 赵建华, 张丰收, 李方]
, 赵建华, 张丰收, 李方]
, 赵建华, 张丰收, 李方]
|
|


第一作者简介: 徐京萍(1982-), 女, 副研究员, 主要从事海洋遥感方面的研究。 E-mail:xjingping@gmail.com。
针对SPOT5卫星遥感数据,以面向对象的图像分析理论为基础,通过多尺度图像分割,获取不同空间尺度结构下的海域使用地物斑块,并综合分割对象的光谱、形状和语义特征,建立分类规则集,实现池塘养殖用海信息提取。结果显示,分类精度优于94%,表明对于地物混杂度较大的海岸带地区,采用面向对象的图像分析技术能有效实现较高精度的池塘养殖用海信息提取,在海域遥感监测领域中具有较好的应用前景。
Based on the theory of object-oriented image analysis, this paper carried out a multi-scale segmentation of SPOT5 image to obtain sea use objects at different spatial scales. By integrating objects’spectral, shape and context features to formulate detailed procedures of information extraction, areas of pond aquaculture were identified with classification accuracy better than 94%, indicating that the method of object-oriented image analysis is effective in the extraction of pond aquaculture information in coastal areas. It would promote the operational monitoring and management of sea use.
20世纪80年代以来, 我国的水产养殖业得到了迅速发展, 特别是在一些沿海城市, 该产业已成为地方政府重要的经济支柱。然而, 由于近海水产养殖业的粗放型发展, 海洋资源被过度开发, 海洋生态环境问题日益突出。海域使用面积迅速扩张带来了一系列问题, 对国家海域管理提出了更高要求。卫星遥感技术作为一项新兴的对地观测技术, 在海域使用现状及变化信息的获取方面发挥着重要的作用。2006年, 国家海洋局启动了“ 国家海域使用动态监视监测管理系统” 的建设和运行, 系统采用卫星遥感监测和实时移动监测等方式, 对海域使用状况以及海域空间资源等动态要素实施全覆盖、高精度的实时监视监测。虽然目前系统已进入业务化运行阶段, 但关键技术支撑不足的问题日益凸显, 特别是在遥感技术应用方面, 缺乏成熟有效且针对海域使用特点的监测技术流程。
根据高分遥感图像的特点, 面向对象的图像分析方法应运而生。它突破了传统方法以像元为基本分类和处理单元的局限[1], 能较好地反映海域使用中地类斑块的多尺度和多特征特点, 更能接近人类理解现实地物的过程 [2, 3]。虽然众多学者对面向对象方法在土地利用分类、建筑物或道路提取、植被分类、灾害评估等方面的应用进行了大量研究和试验, 但将该方法应用到海域使用动态监测的研究还较为缺乏, 特别是针对海域使用特点确定图像分割参数以及在建立分类规则集时类别特征值的选择还存在较多的不确定性。
本研究基于SPOT5卫星遥感图像, 以海域使用中的池塘养殖为例, 对其进行尺度特征研究, 进行光谱、形状、语义等多特征分析, 建立一套基于面向对象的池塘养殖信息提取技术流程, 为提高海域使用遥感监测工作的效率、准确性和自动化水平, 促进国家海域使用动态监视监测管理系统的高效业务化运行提供技术支撑。
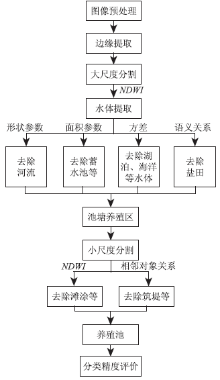
一个典型、完整的面向对象信息提取技术流程主要包括图像预处理、图像分割、特征分析及提取、分类、分类精度评价等步骤。池塘养殖一般是在通过筑堤围割海域而进行养殖生产的海域, 其内部构成主要是水体, 在遥感图像上易与海洋水体、湖泊、入海河流、蓄水池、盐田等地物斑块相混淆。池塘养殖在大尺度空间分布上往往具有集中分布的特点, 且养殖池周围的筑堤将其划分为网格状的面状地物。因此, 可首先对图像进行一个较大尺度的分割, 将池塘养殖集中分布区提取出来, 同时剔除各种包含水体的混淆地物; 再进行小尺度的分割, 去除筑堤以精确提取池塘斑块。在此过程中, 需首先对图像进行边缘提取, 以优化图像分割效果。其具体技术流程见图1。
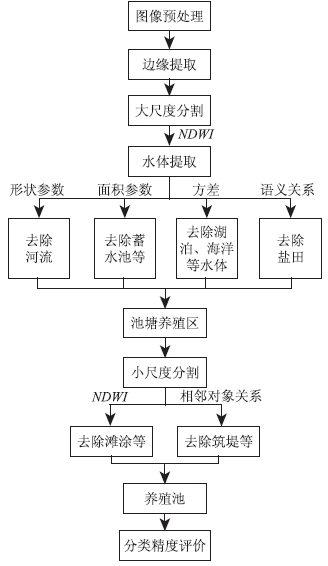 | 图1 池塘养殖用海信息提取技术流程Fig.1 Technical flow chart of pond aquaculture information abstraction |
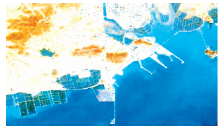
采用2010年4月20日的SPOT5图像对大连庄河地区的池塘养殖用海信息进行提取。其全色波段图像空间分辨率为2.5 m, 波段范围490~690 nm, 大小为4 354× 3 232个像元; 多光谱图像空间分辨率为10 m, 包含绿、红、近红外和短波红外4个波段。图像的预处理主要包括辐射校正、几何纠正、数据融合等, 利用ENVI软件或ERDAS IMAGINE软件中的相应模块来完成。采用Ehlers方法进行图像融合, 融合图像的1、2、3、4波段依次为绿、红、近红外和短波红外波段。融合后的图像见图2。
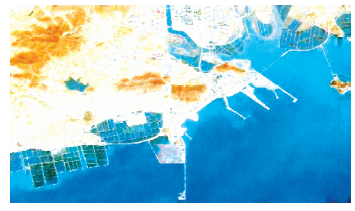 | 图2 融合图像Fig.2 Fused image |
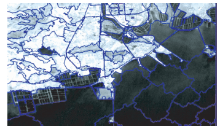
针对池塘养殖用海信息提取的需要, 进行了两次图像分割。在大尺度分割中, 首先基于融合图像的近红外波段, 采用Canny算子进行图像边缘检测[4], 以提取图像中构筑物、填海造地外边界等线状地物; 然后在eCognition软件中, 设置图像4个波段图层和提取的边缘图层权重均为1, 并比较不同尺度分割结果, 最终选择尺度值为300进行大尺度分割, 以实现水陆分离(图3)。
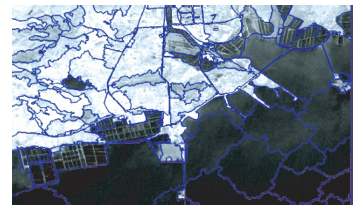 | 图3 针对水体的大尺度图像分割Fig.3 Large scale image segmentation of water |
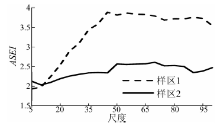
在小尺度图像分割中, 采用平均分割评价指数(average segament estimation index, ASEI)的方法来确定针对养殖斑块的最优分割尺度[5], 平均分割评价指数最大的那个尺度即为最优分割尺度。选择2个典型的池塘养殖集中分布区, 利用eCognition软件, 计算不同分割尺度下的平均分割评价指数, 如图4所示。
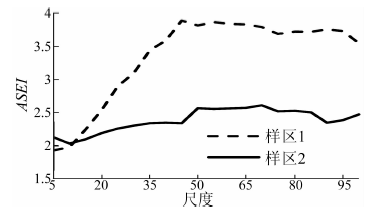 | 图4 池塘养殖最优分割尺度选择Fig.4 Optimal segmentation scale selection of pond aquaculture |
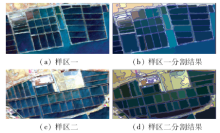
从图4中可以看出, 在尺度值为45~50时, ASEI达到最高。因此, 确定尺度值50为针对池塘养殖用海方式的SPOT5图像最佳分割尺度。图5为选择的2个样区在尺度50下的分割结果。
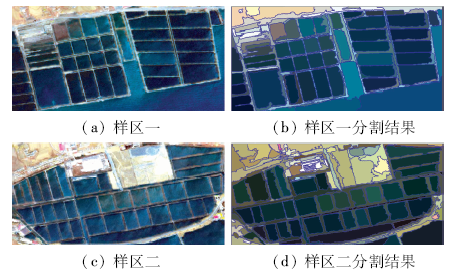 | 图5 尺度值为50的池塘养殖样区分割结果Fig.5 Segmentation result of pord aquaculture areas using segmentation scale value of 50 |
在面向对象的图像分析中, 对象特征主要包括光谱特征、纹理特征、形状特征、语义特征、层次特征、专题特征等。在池塘养殖海域, 有较多的海域使用是通过围割海水的方式来实现的, 形成小面积、具有规则形状的地物斑块, 并且在多数情况下, 这些斑块内部的主要构成是海水(例如池塘养殖、盐田、港池蓄水等)。对于水体信息提取可通过构建归一化水体指数(normalized difference water index, NDWI)来实现, 其具体计算公式见文献[6]。因此, 在池塘养殖信息提取时, 光谱特征最为重要, 其次是形状特征和语义特征。
面向对象的遥感图像分类过程就是将一定图层上的对象与地物类别对应起来, 使得每个图像对象被指定为一定的类别[7]。对象类别的判定可通过基于规则集的模糊分类法来实现, 即用一组特征来描述对象, 并建立对象与类结构之间的关系和判别规则。
首先, 针对尺度300的分割对象, 利用NDWI值提取所有水域斑块, 主要包括池塘养殖区、盐业用海区、河流、湖泊、海洋水体、蓄水池等。其中, 河流通常具有狭长的形状, 湖泊、海洋水体内部较为均质, 而蓄水池面积较小, 分别利用形状指数、波段方差、对象面积等光谱特征或形状特征来识别上述地物。相比之下, 在尺度300的分割结果中, 盐业用海区和池塘养殖区的空间结构较为相似, 内部均有大量筑堤将其划分为网格状的水域。通过观察发现, 不同于池塘养殖区, 盐业用海区内部除了存在大量筑堤外, 还存在光谱特征较为明显的高浓度卤水区。因此, 需在更小尺度上获取盐业用海区内部的特征对象(卤水区)以实现上述两者的有效区分。同理基于本文第2.2节的图像分割方法, 采用平均分割评价指数法确定针对盐田斑块的最佳分割尺度为15, 并在该对象层次上提取出典型的高浓度卤水和盐田内的筑堤。卤水是含有大量藻类浮游生物的水体, 叶绿素浓度较高, 根据Geltison等人的研究结果[8], 3波段组合指数(对于SPOT数据, 可表示为(1/B2-1/B3)× B4)可较好地指示叶绿素a浓度的高低, 因此可利用该指数((1/B2-1/B3)× B4≥ -0.41)提取卤水斑块。对于筑堤的提取, 可通过对形状指数设定阈值(shapeindex≥ 2.5)来实现。此时, 利用eCognition软件将尺度为15的分割结果同化到尺度300的分割图层上, 并认为尺度300的分割对象中同时包含有高浓度卤水和筑堤的即为盐业用海区, 需剔除。对于剩下的池塘养殖区再通过尺度50的图像分割, 并利用NDWI值和对象间的邻近关系去除滩涂、筑堤等地物, 即得到池塘养殖池斑块。对用于提取池塘养殖用海信息的规则集进行总结, 如表1所示。
| 表1 池塘养殖池分类规则集 Tab.1 Classification method of pond aquaculture |
利用表1中的分类规则对研究所用图像进行分类, 其最终的信息提取结果见图6中的黄色区域。
 | 图6 池塘养殖信息提取结果(黄色区域)Fig.6 Pond aquaculture information extraction result(yellow area) |
一般定量表达分类精度的最普遍方法是构建分类误差矩阵(也称为混淆矩阵), 分类误差矩阵是将分类结果与参考数据基于像元或斑块逐一对比得到的。本研究通过目视解译和野外验证结果得到研究区池塘养殖分布数据, 并将其作为参考数据与自动提取结果进行比对计算。总体而言, 基于面向对象的池塘养殖用海信息提取技术具有较高的分类精度。传统的基于像元统计的生产精度为85.83%, 用户精度为92.03%; 而基于面向对象的利用养殖池斑块统计的生产精度为94.04%, 用户精度为95.30%。
池塘养殖的漏分主要表现在盐业用海区有时会存在少量的池塘养殖斑块, 而这些斑块较难识别, 往往会划分到盐业用海方式中。此外, 在池塘养殖池四周存在筑堤, 而这些筑堤的阴影常常会造成提取出来的池塘养殖池比实际面积要小。而池塘养殖的错分情况则主要表现在有些筑堤在图像上表现不明显, 有时会一并划分到池塘养殖斑块中, 而河流入海口等有时也会由于人工建筑物的分割形成小面积水域斑块与养殖池相混淆。
面向对象的池塘养殖信息提取技术流程主要包括图像预处理、边缘提取、图像分割、特征分析及提取、分类、分类精度评价等步骤。在图像分割中, 需采用多尺度分割的方法, 以实现不同空间尺度下的池塘养殖区斑块识别; 基于分割评价指标法确定适用于养殖池的最佳分割尺度值为50。在池塘养殖信息提取时, 光谱特征最为重要, 其次是形状特征和语义特征。面向对象的池塘养殖用海信息提取精度优于94%, 表明采用此图像分析技术能有效实现较高精度的池塘养殖用海信息提取。
The authors have declared that no competing interests exist.
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|