

0 引言
城市三维模型的构建一直是国际遥感、地理信息系统及相关学科研究的热点。近年来,随着“智慧城市”的迅速发展与日益普及,建立有真实纹理的三维城市景观显得尤其重要。目前城市三维建模技术主要有以下3种: ①基于软件的建模技术,以大比例尺地形数据为基础,使用三维制作软件(如3Ds MAX等)建模,该方法能逼真地表示城市的精细结构和材质特征,但存在生产成本高、周期长、效率低等缺点[1]; ②基于传统摄影测量的三维建模技术,采用航空摄影测量技术采集最新数字线划图(digital line graphic,DLG)二维或三维矢量数据,再利用软件进行建模,该方法具有自动化程度高、建模速度快、易于实时更新等优点,但是建筑物侧面纹理信息需要靠其他手段来获取构建[2]; ③基于激光扫描的建模技术,利用激光点云可以快速建立物体的三维模型,但其纹理信息依旧需要靠其他手段获取,并由人工进行纹理贴合[3]。一定程度上,上述方法都存在生产工艺复杂、成本高、效率低等缺点,制约了城市三维建模的发展和推广。
数字摄影测量技术因在处理大范围场景能力以及三维重建精度方面具有无可比拟的优势,被认为是目前获取三维城市模型数据最有吸引力的方法之一。然而,传统摄影测量获取航空影像时,基本近似竖直摄影,造成航空影像上的屋顶信息丰富而墙面往往不可见。同时,建筑物稠密区域存在遮挡现象,也使航空影像不能有效提供建筑物侧面纹理信息。倾斜摄影测量技术是国际测绘领域近些年发展起来的一项新技术,其通过多角度组合相机,打破了以往只能垂直拍摄的局限,使航空摄影系统不但能获取竖直影像,还能获取倾斜影像,较好解决了传统航空摄影获取城市建筑物时遇到的遮挡问题[4]。利用倾斜摄影测量技术进行城市三维建模,不仅可以节省模型细部分析时间,简化模型纹理采集和处理方法,还可以提高工作效率,降低成本。倾斜摄影测量系统在国外起步较早,产品相对成熟,如天宝公司的AOS系统、德国IGI公司的Penta-DigiCam系统和以色列VisionMap公司的A3系统等。国内刘先林院士团队于2010年率先研发成功了第一款国产倾斜相机SWDC-5,并成功完成实验检验,是国内倾斜相机的一大突破。后续上海航遥公司和中测新图公司也相继推出了AMC580和TOPDC-5倾斜相机,使国产倾斜航空摄影测量系统得到了快速发展[5]。上述倾斜摄影测量系统为快速、大面积城市真三维模型的获取提供了新方法,但由于倾斜摄影测量系统本身体积和重量较大,必须需要小型飞机或动力三角翼飞行器,甚至是运5运输机作为平台进行数据采集,加之其价格昂贵,使得数据生产成本极高,很大程度上限制了该技术的广泛运用[6]。
近年来,无人机成本和可操作性有了革命性的突破,使其从传统的军事、航测等专业领域进入到大众消费市场。消费者级无人机具有获取影像成本低、速度快和空间分辨率高等优点,在遥感地质、精准农业、环境监测及城市规划等领域得到了广泛应用[7]。其虽然只搭载一个相机,但可以通过控制云台改变相机的拍摄角度来获取倾斜影像,从而实现专业倾斜摄影测量系统的影像采集功能。同时,基于计算机视觉和运动恢复结构(structure from motion,SfM)的图像处理技术不仅可以将正射影像与倾斜影像进行联合平差,生成点云,并自动构建三维模型、纹理映射,最终生成逼真的三维场景,而且对相机拍摄位置、图像尺度及拍摄焦距没有要求[8],较大提高了数字城市三维模型的生产效率。无人机软硬件技术的发展拓宽了其应用领域,在城市三维建模领域展示了巨大的发展潜力。但利用消费者级无人机倾斜摄影测量进行三维建模的研究少有报道。本文拟探讨利用消费者级无人机进行城市三维建模的一般步骤与方法,以中国地质大学(武汉)北校区为例,进行研究区倾斜影像采集及三维模型构建,并对建模结果进行验证,旨在为城市三维建模研究提供一种方便、快捷的新方法。
1 无人机摄影测量系统
目前无人机种类繁多,有无人直升机、固定翼无人机和多旋翼无人机等多种机型。不同无人机具有不同的特点和适用领域。多旋翼无人机飞行速度可控,飞行高度可调且可以低空飞行,同时该无人机不受起降场地限制,更适合用于城市三维建模的数据获取。本研究选用深圳大疆科技精灵系列四旋翼无人机DJI Phantom 4(图1)。
图1

该无人机由飞行器、遥控器、云台相机以及配套使用的移动设备组成。飞行器重为1 380 g,配备全新的影像稳定系统,控制精度高达±0.03°。飞控系统集成于飞行器机身内部,具备双冗余惯性测量单元(inertial measurement units,IMU)和指南针系统。一体式云台位于机身下部,其上搭载嵌入式相机。遥控器配备灵敏的控制杆和专用按钮,工作频率为2.400~2.483 GHz。内置DJI Lightbridge高清图传系统,图像传输和可遥控距离达5 km。Phantom 4能同时接受GPS及GLONASS定位卫星信号,可获取5 m精度的影像位置信息。其搭载的相机焦距为20 mm(35 mm格式等效),内置1 200万像素1/2.3 in CMOS图像传感器。相机镜头针对航拍进行了专门优化,94°视角、f/2.8光圈的超低畸变的镜头,成像清晰锐利。云台相机的可控转动范围为(-90°,+30°),可以通过控制云台来采集不同角度的倾斜影像。Phantom 4携带了高能量密度智能飞行电池和高效率的动力系统,最大平飞速度为20 m/s,单个电池最大续航时间约为28 min。
2 三维模型构建技术流程
图2
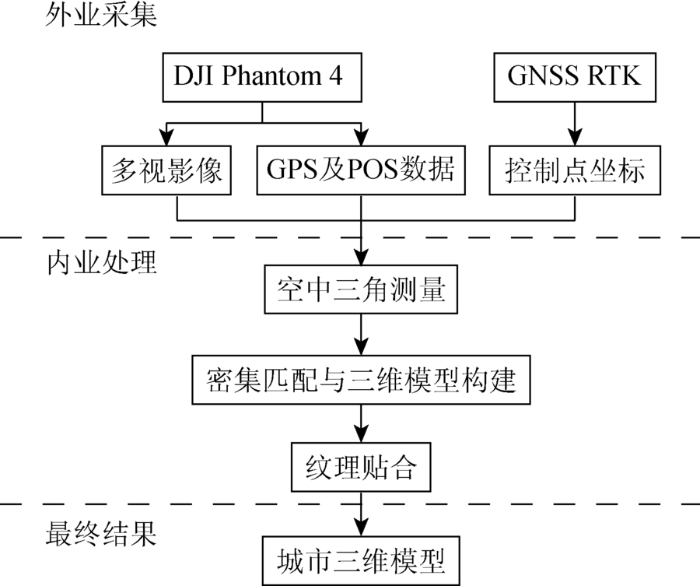
无人机采集数据不仅包含垂直影像,还包含多角度、大倾角倾斜侧视影像,且不同于航空影像,存在重叠度高、像幅小、基线短、旋片角大且畸变严重等问题,所以传统摄影测量算法已经不适用倾斜影像。基于SfM的新型数字摄影测量为获取三维地形数据提供了有效的方法。倾斜摄影测量处理软件主要有法国ASTRIUM公司的“Street Factory”、法国Accute3D公司的Context Capture和瑞士PIX4D公司的PIX4D mapper系统等[5]。其中,Context Capture软件运行时无需人工干预,生成的模型精度高,同时在纹理贴合时运用自动颜色补偿算法保证瓦片间的数据差异更小,因此本研究采用该软件来处理无人机影像,构建城市三维模型。
3 实例分析
3.1 数据采集
3.1.1 地面控制点
在影像获取之前需要在研究区采集控制点,用于后续的空中三角测量及模型精度验证。在研究区内选择道路交叉点、建筑物拐点和体育场标记线交点等作为地面控制点,然后利用GNSS RTK(1+1)测量其坐标,测量精度达到cm级,可以满足实验的精度要求。本次实验共采集15个控制点,其中10个用于校正空中三角测量结果,5个用于精度验证。
3.1.2 航线设计与无人机影像采集
实验采用Altizure软件进行无人机航线设计。该软件是一款优秀的飞控及航线规划软件,支持DJI等多款型号的无人机。飞行前需要在软件提供的地图上规划需要建模的航拍区域、设定飞行高度、影像重叠度以及相机倾斜角度等参数,软件会自动生成1次正摄和4次倾斜摄影的飞行路线,预估飞行时长,并可实现智能续飞。图3为采集中国地质大学(武汉)北校区多视影像的5个架次航线设计。
图3
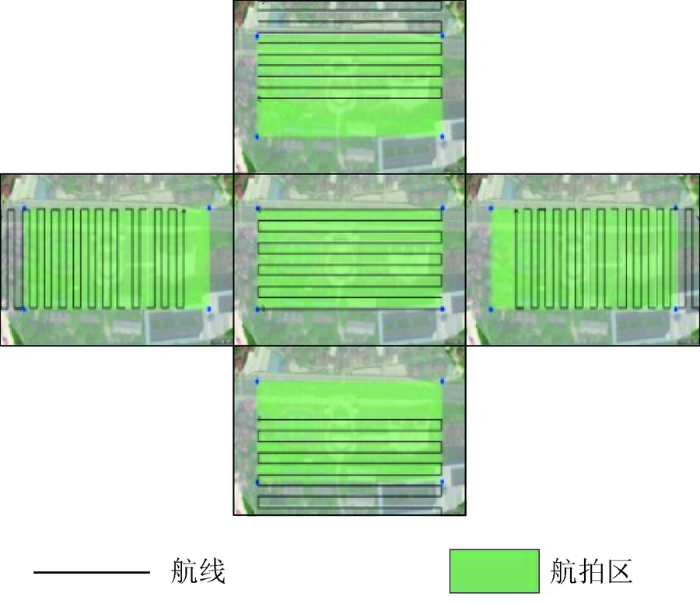
图4

3.2 全自动快速三维模型构建
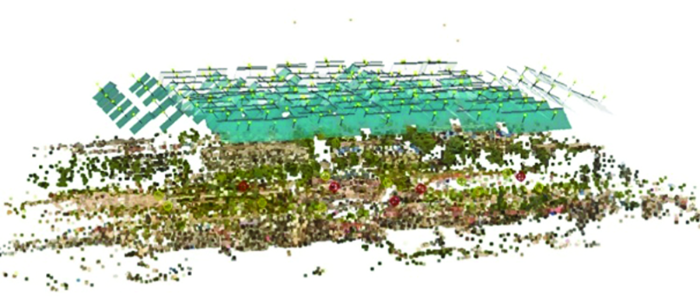
3.2.1 空中三角测量
图5
3.2.2 密集匹配与模型构建
图6
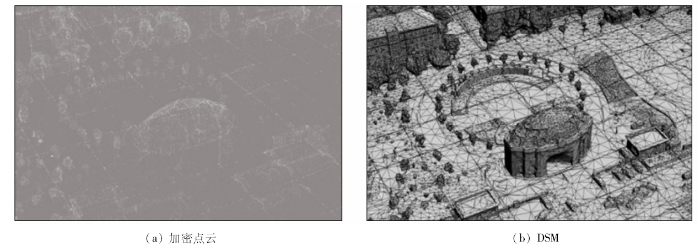
从图6中可以看出,由于树木和大门顶部修饰结构复杂,点云和三角网较为密集,而广场和路面的结构简单,点云和三角网较为稀疏。
3.2.3 纹理贴合
图7

3.3 精度分析
3.3.1 空中三角测量加密精度
通过计算5个验证点的实测三维坐标与区域网平差得到的三维坐标之间的误差,来衡量区域内空中三角测量加密结果的精度。验证点误差统计如表1所示。
表1 验证点误差统计
Tab.1
| 误差参数 | 平面 | 高程 |
|---|---|---|
| 最大值 | 0.066 0 | 0.012 0 |
| 最小值 | 0.018 2 | -0.000 1 |
| 中误差 | 0.030 0 | 0.011 0 |
3.3.2 模型复杂度
利用定性方法来评估构建的三维模型的复杂度。对三维模型进行旋转和缩放,将模型纹理、颜色、空间位置和模型完整度等与真实场景进行对比。结果表明,建筑物模型的基本轮廓、外部建构表现良好,其中屋檐、阳台和装饰物表现基本完整; 带状绿化树和绿化林地采用主体建模表现,基本上能够反映树木的色调和基本特征; 仅有少量的栅栏、路灯和座椅等地物要素未表现出来。基于《三维地理信息模型数据产品规范》,根据模型精细度和纹理精细度将三维地理信息产品分为I—IV级(I级为最优)[13],本文构建的三维模型复杂度介于II级到III级之间,能够满足城市三维模型的需求。
4 结论
针对传统测量建模方法生产工艺复杂、效率低,以及专业倾斜摄影测量设备昂贵、机动性差等缺点,尝试利用消费者级无人机倾斜摄影技术进行三维城市建模,并以中国地质大学(武汉)北校区为研究区,进行了多视影像的采集和三维模型构建实验,得到以下结论:
1)通过飞行控制软件控制改变内嵌在无人机云台中相机的方向,消费者级无人机可完成专业摄影测量系统的多视影像采集工作,从而大大降低了城市三维模型数据的获取成本。
2)利用消费者级无人机获得的高空间分辨率多视影像,结合高精度地面控制点,可以全自动化生成高精度的城市三维模型,生产的模型整体性好、地物无缝衔接、场景真实、纹理逼真,是一种经济高效的城市三维模型生产方法。
参考文献
3DS MAX与SketchUp的三维城市建模技术实验对比分析
[J].
DOI:10.14188/j.2095-6045.2015.02.006
URL
[本文引用: 1]

三维城市是数字城市和数字县区建设的重要内容,近几年来,数字城市和数字县区建设在全国范围内开展,城市三维建模技术逐渐成为热点,具有广阔的应用前景。以Arc GIS为例,分别结合3DS MAX与Sketch Up建模流程,对比两者的优越性,分析得出一种最优方法,实现城市地理空间三维建模与可视化展现,供数字县区地理空间框架建设借鉴。
Comparative analysis of urban geospatial 3D modeling technology between 3DS MAX and SketchUp
[J].
基于ArcGIS与航空影像的城市三维建模方法研究
[J].
DOI:10.14188/j.2095-6045.2014.06.017
URL
[本文引用: 1]
针对当前"数字城市"建设对三维建筑模型的需求,提出了一种基于Arc GIS平台,利用航空影像及其4D产品进行城市快速三维建模的方法,详细介绍了建模数据来源、三维模型构建方法及技术路线等,并进行了试验及分析,验证了该方法的可行性和高效性。
Research on city 3D modeling based on ArcGIS and aerial images
[J].
基于三维激光扫描数据的建筑物三维建模
[J].
DOI:10.3969/j.issn.1006-7949.2007.05.015
URL
[本文引用: 1]
给出基于三维激光扫描测量仪所获得的点云数据来实现建筑物三维建模的方法。文中介绍了三维激光扫描测量仪的系统组成与工作原理,给出对点云数据处理的过程和方法,阐述建筑物三维建模的方法,并用实例介绍整体方法的实现过程和效果。
Three dimension modeling of buildings based on three dimension laser scanner data
[J].
倾斜影像的三维纹理快速重建
[J].
DOI:10.11947/j.AGCS.2015.20140341
URL
Magsci
[本文引用: 2]
<p>针对三维城市模型重建,提出了一种利用倾斜影像实现城市模型纹理快速重建的方法。该方法基于摄影测量计算机视觉理论,在事先处理得到城市建筑物数字表面模型的基础上,利用共线方程计算物方与像方的几何投影关系,获得建筑物的三维信息与纹理信息。通过一定的最优算法选择出地物面的理想纹理,实现城市建筑物纹理的自动提取及稠密建筑物纹理的遮挡处理。真实影像纹理重建的结果表明:应用本文方法进行三维城市模型纹理重建具有自动化程度高、效果逼真、成本低的特点,为快速、大面积的城市真三维模型纹理重建提供了一种有效的实现途径。</p>
Rapidly 3D texture reconstruction based on oblique photography
[J].
浅析国内倾斜摄影技术的发展
[J].
DOI:10.3969/j.issn.1672-5867.2014.09.017
URL
[本文引用: 2]
在简单阐述了倾斜摄影技术内容和特点的基础上,介绍了倾斜摄影技术在国外的发展历程以及应用情况,从倾斜摄影技术获取装备和倾斜摄影后处理软件两个角度分析了国内倾斜摄影技术的发展现状,并以具有代表性的国产倾斜航摄仪SWDC-5为例,着重分析了SWDC-5倾斜航摄仪的技术特点及其在国内的应用发展现状,并对倾斜摄影技术成果的专业化应用做了进一步的探讨。
The analysis of the development of oblique photography technique in China
[J].
倾斜摄影测量高中低空解决方案研究
[J].
DOI:10.3969/j.issn.1672-5867.2016.01.006
URL
[本文引用: 2]
阐述了倾斜摄影技术在实际应用中数据获取与分类方法,介绍了高中低空相关载具与倾斜相机的特点.及针对以上数据的建模方案,为倾斜摄影技术应用于城市建设提供了技术支持。
Study on photogrammetry solutions based on high-middle-low level
[J].
轻小型无人机航摄技术现状及发展趋势
[J].
DOI:10.13474/j.cnki.11-2246.2015.0068
URL
[本文引用: 1]
轻小型无人机因其获取影像机动灵活、影像分辨率高、成本低等优势,成为传统航空摄影测量手段的有效补充,已在测绘地理信息、防灾减灾、反恐维稳、农业估产、水利电力工程建设、铁路、公路带状选线工程,以及西部1∶5万地形图空白区测图工程、远离大陆的岛礁测绘等诸多领域发挥了积极作用。本文针对当前民用轻小型无人机航摄系统开展航空摄影和影像摄影测量处理的情况,从航空摄影航线设计、搭载传感器情况、航摄质量快速检查、像控测量工作及影像摄影测量处理等方面阐述了现阶段民用轻小型无人机航空摄影及影像摄影测量处理的现状,分析了现阶段轻小型无人机航摄技术存在的问题,对下一阶段轻小型无人机航摄技术的发展提出了建议。
Aerial photogrammetric technology of light small UAV:Status and trend of development
[J].
基于SfM方法的高密度点云数据生成及精度分析
[J].
DOI:10.3969/j.issn.0253-4967.2015.02.024
URL
[本文引用: 1]
地形数据的质量(精度和分辨率)影响着地球科学的研究水平。Li DAR测量是目前获取高分辨率地形数据的有效技术方法之一,但是其高昂的测量成本和相对复杂的后期数据处理限制了Li DAR技术的大众化应用。近年来,一种被称为Sf M(Structure from Motion)的适合大众化使用的新的高精度3维地形数据获取技术开始引起人们的注意。这种新型数字摄影测量技术可以利用高效的图像特征匹配算法从多视角照片中提取重叠区域的3维地形数据。由于Sf M技术仅需要目标物体的照片,而且对相机拍摄位置、图像尺度及拍摄焦距没有要求,因此利用简单测量平台采集地面照片就可以获取高质量的3维地形数据。与Li DAR技术相比,大大降低了获取高精度数据的成本,使得高精度3维地形数据的使用大众化。文中介绍了Sf M技术的基本原理和流程,展示了Sf M技术获取高精度3维地形数据的简单而有效的特性,特别适合于植被稀少的区域。文中利用近千米高空拍摄的、具有约70%重叠度的一套随Li DAR飞行采集的数字航空照片生成具有真彩色的高密度Sf M点云数据,点密度高达25.5个/m2,可生成分辨率0.2m的DEM(数字高程模型)。对比相同区域的LiDAR点云数据,统计分析表明58.3%的Li DAR数据与Sf M数据的垂直偏差〈0.1m,88.3%的Li DAR数据的垂直偏差〈0.2m;而且发现不同地貌的Sf M数据精度存在差异,平缓地形的Sf M数据精度高于陡峭地形的Sf M数据精度。文中还介绍了以氦气球作为拍摄平台的Sf M测量系统,可以快捷地获取高精度的3D地形数据和正射影像,比目前常用的差分GPS测量具有更高的效率和数据精度。
Accuracy analysis of terrain point cloud acquired by“structure from motion”using aerial photos
[J].
基于无人机倾斜摄影数据的实景三维建模研究
[J].
DOI:10.3969/j.issn.1672-5867.2015.03.013
URL
[本文引用: 1]
阐述了在无人机自制镜头获取的倾斜摄影数据基础上,应用Inpho,Pix4Dmapper、街景工厂等软件进行实景三维建模的方法。除总结研究成果外,还对无人机实景三维建模的应用领域进行了探讨,为智慧城市的三维系统建设提供新的解决方案。
Study on real 3D modeling of photographic data based on UAV
[J].
基于CMVS/PMVS多视角密集匹配方法的研究与实现
[J].使用CMVS\PMVS密集匹配方法,不需要任何诸如可视壳、深度图、包围盒等先验知识。输入SFM点集,先通过CMVS对影像进行聚簇,以减少数据量,再由基于贴片模型的PMVS方案通过匹配、膨胀、过滤三个步骤,在局部光度一致性和全局可见性约束下完成密集匹配。整个过程中算法能自动剔除外点与障碍物,最终输出结果为覆盖整个重建目标表面的小型矩形贴片集。CMlVS\PMVs密集匹配方法适用于对无序影像和室外场景的三维重建。实验结果表明:使用cMvs\PMVs密集方法得到的三维点云非常密集,具有很高的实用价值。
Research and implementation based on multi-view dense matching by applying CMVS/PMVS
[J].
分块立体重建的PMVS算法研究与实现
[J].
Research and implementation of PMVS algorithm based on block dimensional reconstruction
[J].

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}