0 引言
近年来城市防灾减灾任务艰巨,城市暴雨涝灾常发。城镇建设面积迅速扩张、以植被为主的自然景观逐渐被人工不透水面所取代,是导致城市发生暴雨内涝的重要影响因素[1 ] 。不透水面指天然或人造的难以被水穿透的地表,城市不透水面主要由人工地物构成,如屋顶、停车场、水泥及沥青路面等。不透水面作为衡量城市化程度和环境质量的重要指标,受到越来越多的关注。研究表明,遥感数据在地物提取方面有着很大的潜力和优势,利用遥感手段提取不透水面已成为研究热点之一[2 ] 。
目前常用的不透水面遥感提取方法有人工解译法、指数模型法、回归分析法、线性光谱混合模型法、决策树分类法、人工神经网络和面向对象法等。这些研究取得了较好的成果,但是在精确高效提取不透水面方面仍存在不足。如: 基于V-I-S模型利用线性光谱混合分解将光谱信息分解成高反照度、低反照度、植被和土壤端元,但是由于光谱相似造成端元之间存在不确定性[3 ,4 ,5 ] ; 回归分析法对于不同时相不同区域难以实现自适应归一化,且对数据噪声敏感[3 ,6 -7 ] ; 人工智能算法在遥感影像上应用还不够成熟,网络连接权值的物理意义不易推断,学习收敛速度慢,且对训练样本的数量和质量有较高要求[8 ] ; 面向对象法虽然包含了形状、纹理和上下文关系等空间信息,但是分割尺度的确定对分类精度影响很大[9 ] 。基于上述方法,也开展了大量改进研究,以提高算法的鲁棒性和精度。同时,传统不透水面提取的研究方法只采用单一卫星数据源,没有利用多源数据的优势。因此引入了夜间数据、合成孔径雷达数据(synthetic aperture Radar,SAR)、机载激光点云数据(light detection and ranging,LiDAR)等新型数据。将这些数据与传统遥感影像相结合[10 ,11 ] ,已成为了当前不透水面提取的重要手段。Hodgson等[12 ] 利用航片数据和LiDAR数据,对城区不透水面进行了提取,相比使用传统分类方法精度得到了提高; Im等[13 ] 使用WorldView数据和LiDAR数据对城市不透水面进行了提取,既丰富了信息源,也提高了不透水面的提取精度。
广州市是国内城市化发展最为快速的地区之一,曾多次遭遇连续强降雨,导致市区大面积内涝,因而实时准确获取广州市不透水面分布情况迫在眉睫。以该地区作为研究区,把建筑物、水泥沥青道路和停车场等人工构造物归为不透水面,把植被、裸地和水系归为透水面。基于图论的最优分割方法(Grabcut),将不透水面的提取转换为不同数据源下的最优标记问题,建立能量函数,融合Landsat8和我国高分一号(GF-1)卫星影像的光谱和空间信息,并且加入了LiDAR点云数据的高程和强度信息,结合多源特征的优势,精确提取不透水面。
1 数据源及其预处理
1.1 数据源
本研究多源数据选用30 m和15 m空间分辨率Landsat8影像、8 m和2 m空间分辨率GF-1影像以及0.5 m空间分辨率LiDAR点云数据。全部数据均在2013年10—12月间采集,获取时间相近。其中,Landsat8影像波段数较多,光谱信息丰富; GF-1影像空间分辨率较高,空间信息丰富; LiDAR点云数据拥有高程和强度信息。
1.2 数据预处理
首先进行影像配准,将不同传感器获取的不同空间分辨率卫星影像配准到统一的坐标系下,并且对卫星影像进行辐射纠正,建立同时相、多尺度、多源数据金字塔。其中,由于多源影像间空间分辨率跨度较大,直接配准会导致操作不便且精度较低,故采取根据空间分辨率大小,逐级配准的方法。以ENVI软件中同地区的数字高程模型(digital elevation model,DEM)为基准,先对全色和多光谱GF-1影像分别进行无控制点的正射校正,再逐次将全色和多光谱Landsat8影像配准到正射校正后的GF-1影像坐标系。
2 提取方法
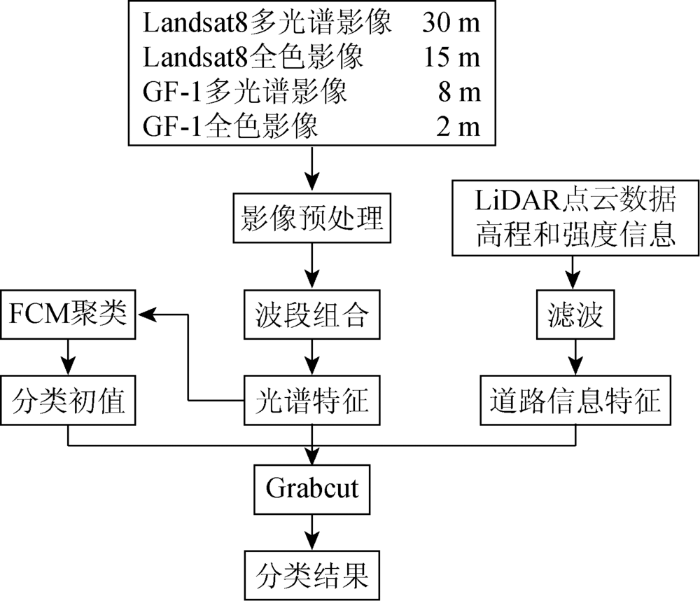
为了精确提取不透水面,采用Grabcut融合多源卫星影像的光谱和空间信息,并辅以LiDAR点云数据的高程和强度信息。研究方案如图1 所示。
图1
图1
提取方法流程
Fig.1
Flowchart of extracted method
首先进行影像预处理,统一坐标系; 然后分别从卫星影像和点云数据中提取光谱特征和道路信息; 再将提取的光谱特征使用模糊C均值聚类(fuzzy C-means clustering,FCM)方法进行聚类,以分类粗结果作为分类初值; 最后构建基于Grabcut的分类模型,建立能量函数,融合多源特征,迭代优化初值。
2.1 多源特征
由于不透水面普遍在热红外波段辐射率很高,在近红外反射率很低[14 ] ,因此卫星影像可以在不透水面提取方面发挥其光谱特征方面的较大优势。本文将归一化差值植被指数(normalized differential vegetation index,NDVI)、增强型植被指数(enhanced vegetation index,EVI)和改进的归一化差值水体指数(modified normalized differential water index,MNDWI)选作光谱特征参数,用于Grabcut的输入特征和初值获取。
1)NDVI。通过表现植被强吸收能力的红光波段和表示植被生物量的近红外波段的组合计算,可以使感兴趣地物信息得到增强[15 ] ,其公式为
(1) NDVI = NIR - RED NIR + RED
式中: NIR 表示近红外波段的反射率值; RED 表示红光波段的反射率值。
2)EVI。在NDVI的基础上改进得到EVI,其公式为
(2) EVI = 2.5 NIR - RED NIR + C 1 RED - C 2 BLUE + L
式中: BLUE 表示蓝光波段的反射率值; L = 1 C 1 = 6.0 C 2 = 7.5 BLUE 修正大气对RED 的影响。
3)MNDWI。由于土壤、水体和沙土、部分水泥沥青具有类似的光谱特征,单利用NDVI无法准确区分出不透水面,有必要引入水体指数。水体在绿光波段中比红外波段具有更高反射率,MNDVI可以准确提取出水体[16 ] ,其公式为
(3) MNDWI = GREEN - MIR GREEN + MIR
式中: GREEN 表示绿光波段的反射率值; MIR 表示中红外波段的反射率值。Landsat8影像第6波段SWIR1对应中红外波段。
由于光谱相似性,单从卫星影像中难以准确区分出人工道路和裸地。通过引入LiDAR数据,得到较准确的人工道路和停车场等不透水面,弥补卫星影像的缺陷。
LiDAR系统可以快速获取具有地表三维坐标及反射强度等信息的密集点云,对于植被、建筑物和道路等地物的精确提取具有重要意义。然而仅依靠高程信息进行分类的可靠性有限,并且强度信息的噪声大,影响因素多,还难以真实反映地物反射率信息[17 ] 。因此,可以结合高程和强度信息,将点云信息作为辅助信息参与到不透水面分类过程中。
1)高程信息。为了精确提取道路,首先需要利用高程信息通过点云滤波区分地面点和非地面点; 再采用形态学滤波,依次对移动窗口中的点进行腐蚀和膨胀,搜索窗口内的最低点,逐步构建DEM。此算法对于城市地区滤波很有效,且计算简单。
2)强度信息。LiDAR强度信息是接收到的目标回波信号形成的图像。沥青、混凝土的回波强度明显区别于植被等自然地物,且在回波特点上,道路点云都为末次回波[18 ] 。对于强度值,有学者采取先对样本标定再提取的方法,也有采取聚类方法提取点云数据中的道路[17 ] 。基于以上理论,本文首先去除多次回波点,排除一部分非道路点; 然后采取FCM方法利用强度值将道路和植被、裸地分开。同时,在实验过程中,发现道路和建筑物质地均一,回波强度在某一小范围内,而裸地里包含有沙石、土壤和草地等,回波强度起伏较大,因此将回波强度的方差值同强度值一起作为聚类的特征,增强道路信息。
2.2 多源数据融合分类模型
图割(Graph cut)是一种基于图论的图像分割方法,其能量最小化框架由Boykov等提出[19 ] ,近年来在计算机视觉领域中被广泛应用。该方法可以很好地将图像的区域和边界信息相结合,建立能量模型,通过最大流最小割算法,从而得到能量最小的分割结果。
Grabcut是在此研究基础上进行了改进,将交互方式从种子点选取变成框选目标,并且引入高斯混合模型进行建模,通过不断分割估计和模型参数学习进行迭代,实现分割[20 ] 。其能量函数为
(4) E ( α , κ , θ , z ) = U ( α , κ , θ , z ) + V ( α , z )
式中: α κ θ z U ( α , κ , θ , z ) V ( α , z )
数据项表示图模型上所有节点的权值,由高斯混合模型计算得到,即
(5) U ( α , κ , θ , z ) = ∑ D ( α n , κ n , θ , z n )
式中n 表示第n 个像素。该项也表示像素被标记为前景或背景的惩罚,即某个像素属于前景或背景概率的负对数,代入高斯混合模型可得
(6) D ( α n , κ n , θ , z n ) = - ln p ( z n | α n , κ n , θ ) - lnπ ( α n , κ n )
(7) ln p ( z n | α n , κ n , θ ) = - 1 2 lndet ∑ ( α n , κ n ) - 1 2 [ z n - μ ( α n , κ n ) ] T ∑ ( α n , κ n ) - 1 [ z n - μ ( α n , κ n ) ]
式中: det用来计算行列式的值; μ 为每个高斯分量的均值向量。
平滑项表示图模型上所有边的权值,由相邻节点间的欧式距离计算得到,体现了像素间不连续的惩罚,即
(8) V ( α , z ) = ∂ ∑ ( i , j ) ∈ C [ α j ≠ α i ] exp ( - β | | z i - z j | | 2 )
式中: ∂ i 和j 表示图像范围C 内的相邻像素; 参数β 由图像对比度决定,用来调节相邻像素间的差异。
通过最大流最小割算法,计算能量函数最小状态,更新高斯混合模型的参数,重新计算新的能量函数,如此反复迭代得到最优分割结果。
2.2.2 基于改进的Grabcut不透水面提取模型
将Grabcut和多源遥感数据结合,从能量函数项、初值设置和特征空间3方面进行改进,融合多源特征实现不透水面提取。
1)能量函数项。由于点云数据的不稳定性,只能作为辅助条件参与分类,因此在原有函数基础上,增加了一项道路信息的约束项 L ( α )
(9) E ( α , κ , θ , z ) = U ( α , κ , θ , z ) + V ( α , z ) + L ( α )
式中: 数据项 U V L ( α )
(10) L ( α ) = γ ∑ [ l n ≠ α n ]
式中: γ l n α n
2)初值设置。原始Grabcut中,将人工框选区外的像素标记为绝对背景初值,框内标记为可能前景初值,通过迭代一步步在可能的前景中筛选出绝对前景。本文将不透水面和透水面分别作为分类的前景和背景,需要处理的是覆盖面积大、连通区域细碎的卫星影像,人工标记种子点工作量大,需尽可能减少人工干预。所以首先对多源卫星影像进行了FCM聚类,将得到的粗分类结果作为Grabcut的初值,即将聚类得到的不透水面和透水面分别标记为可能前景和背景初值。
3)特征空间。一般的图割基于颜色空间(灰度或RGB)对目标和背景建模,经典的模型有灰度直方图、高斯混合模型等。但是对于多源多光谱影像而言,每个波段的重要性不一样,颜色信息冗余,所以需要先进行筛选组合,将计算得到的一系列突出表征特定地物的指数作为输入特征,进行建模。本文采用NDVI,EVI和MNDWI作为输入特征,采用高斯混合模型建模,并结合由邻接关系得到的空间特征和点云数据中提取的道路信息,共同构建能量函数。
通过以上3方面的改进,本文将改进的Grabcut引入不透水面提取中,建立了新的能量函数,融合植被特征、水系特征、道路特征以及各相邻点间的光谱和空间特征,使分类过程更有针对性,并且很大程度上减少了人工干预,有利于分类精度的改善和不透水面的准确提取。
3 实验结果与分析
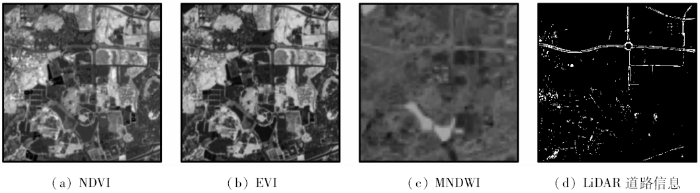
在Visual Studio2013软件平台上,通过编程实现研究区不透水面的提取。所需的多源特征如图2 所示。
图2
图2
多源特征
Fig.2
Multi-source features
首先,对多源卫星影像计算指数值,GF-1具有红光、绿光、蓝光和红外4个波段,且空间分辨率较高,故采用GF-1计算NDVI和EVI值,如图2 (a)和(b)所示; 由于Landsat8具有11个波段,且具有对应于中红外的SWIR1波段,故采用Landsat8计算MNDWI,如图2 (c)所示。其次,结合高程和强度信息从LiDAR数据中提取出人工道路,如图2 (d)所示。然后,根据提取的光谱特征,采用FCM聚类得到初值。最后,构建图割能量函数,迭代得到能量最小的分类结果。
3.1 实验结果
图3
图3
分类结果
Fig.3
Classification results
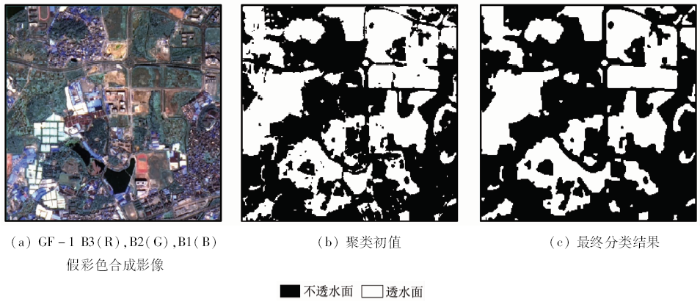
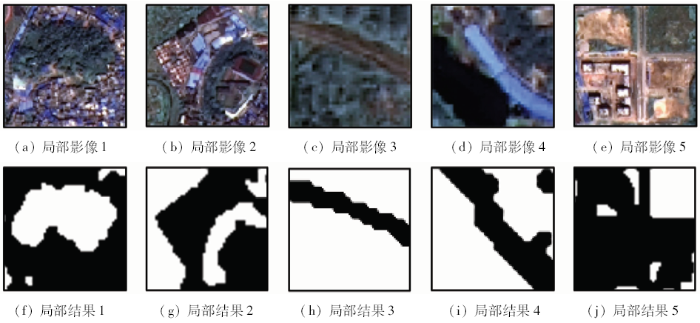
从图3 (c)中可以看出,经过Grabcut分割后,由于空间特征的影响,离散的噪声点都被消除了; 道路也由于点云信息的加入被较好地提取出; 水系、植被和建筑物也均被较好提取出; 人造田径场通常是在水泥地面上铺盖草皮,应该被分为不透水面,分类正确; 然而裸地和人造道路间存在部分误分,原因是部分裸露地表含水量低、沙石含量较高、有人工挖掘碾压痕迹,光谱表现和不透水面相似,且表面平滑无法根据高程信息计算粗糙度来剔除。局部细节分类结果如图4 所示。
图4
图4
局部细节分类结果
Fig.4
Details of classification results
从图4 (f)和(g)可以看出植被和建筑群间区分清晰; (h)中道路和植被分类正确; (i)中左下角为水系,右上角为植被,中间为独立建筑物,均能被较好地区分; (j)右上角的植被被正确提取出,但左半部分和左下角的裸地均没有提取出,被误分为不透水面。说明本文方法在裸地和不透水面的区分上还有待改进,对于其他地物均能正确区分。
3.2 精度评定
为了定量检验分类精度,随机选取了均匀分布在影像中的5 136个测试样本,每个样本均为5像素×5像素大小,将各个样本中的每个点,通过人工解译赋予属性作为真值,其中不透水面点有71 550个像素,透水面点有56 850个像素。在ENVI软件上完成真值勾画。
为了证明本文方法能优化聚类结果,且选取的多源数据均对分类结果有利,分别对本文方法结果、聚类所得初值的分类结果、不加入LiDAR数据的分类结果、不加入Landsat8数据的分类结果进行精度评定。
由表1 中分析,仅采用聚类所得初值、不加入点云数据和不加入Landsat8数据时,分类精度均比本文方法低,主要体现在不透水面的漏分上。结合分类结果影像来分析,原因其一是缺乏邻接关系干预导致离散噪声未被剔除; 其二是缺乏点云信息的干预而导致道路漏分; 其三是Landsat8的中红外波段对水系敏感,其缺失将使水系被误分成不透水面。由此证明了本文将多源数据在Grabcut框架下融合分类对于不透水面提取有一定意义,精度得到提高。
为对比分析本文和其他不透水面提取方法的精度,本文使用ENVI5.1软件里的最大似然监督分类、线性光谱混合分解和决策树分类3种方法分别进行分类实验,精度评价如表2 所示。根据表2 结果可知,本文方法的总精度达到90.25%,Kappa系数为0.820,均优于其他3种传统遥感方法,在道路和水系提取上更准确。同时,相比于监督分类需要采集感兴趣区域作为训练样本、线性光谱混合分解需要人工选取端元波谱、决策树分类需要进行属性选择度量,本文方法在人工干预方面大大减少了工作量,具有更高的适应性和稳定性。
4 结论
本文结合多光谱影像Landsat8、高空间分辨率卫星影像GF-1和LiDAR点云数据的优势,构建图模型,将Grabcut引入不透水面提取中。结论如下:
1)基于Grabcut的多源数据融合提取方法,通过能量优化框架,实现了光谱信息、空间信息、高度和强度信息等多源特征融合。根据多源数据特点设计特征,一定程度上解决了裸地和不透水面相互混淆的问题,相比于单一数据提取精度得到明显提高。
2)本文方法能够对像素之间的空间关系和局部的相似性信息进行很好的表达,相较于传统的像素分类方法,有利于获得噪声更少的分类结果。
3)与传统提取方法相比,本文方法大大减少了工作量,具有更高的适应性和稳定性。
基于Grabcut的多源数据融合提取方法在以下方面还有待进一步深入研究: 第一,可引入更多突出表现特定地物的波段或指数,提高分类精度; 第二,采用的LiDAR数据空间分辨率仅0.5 m,而若使用空间分辨率更高的密集点云,可以通过计算粗糙度来区分自然裸地和平坦道路,在一定程度上减少误分; 第三,需对更多区域进行实验,检验方法的普适性。
参考文献
View Option
[1]
吴庆洲 . 论北京暴雨洪灾与城市防涝
[J].中国名城 , 2012 (10 ):4 -13 .
DOI:10.3969/j.issn.1674-4144.2012.10.001
URL
[本文引用: 1]
通过研究北京及其他城市暴雨后内涝灾害的原因,对照古城水系的经验,认为古代以河渠为城市排水干渠,密度大,行洪断面大,调蓄系统容量巨大,管理良好,是防止暴雨后城市内涝的重要经验,可供借鉴。
Wu Q Z . Discussion on rains and floods in Beijing and urban waterlogging prevention [J].China Ancient City , 2012 (10 ):4 -13 .
[本文引用: 1]
[3]
曹丽琴 , 李平湘 , 张良培 , 等 . Fuzzy ARTMAP算法在城市不透水面估算中的应用研究
[J]. 武汉大学学报(信息科学版) , 2012 ,37 (10 ):1236 -1239 .
URL
Magsci
[本文引用: 2]
为了克服线性光谱混合分析模型的缺陷,兼顾Landsat ETM+和Quickbird遥感数据多源信息及Fuzzy ARTMAP神经网络自适应学习的优势,提出了利用Fuzzy ARTMAP方法来估算城市不透水面覆盖度(ISP)。以武汉市为例,结果表明,与线性光谱混合分析模型相比,基于Fuzzy ARTMAP神经网络方法估算结果精度较高,与实际城市不透水面覆盖度分布范围一致。
Cao L Q Li P X Zhang L P , et al . Estimating impervious surfaces using the Fuzzy ARTMAP
[J]. Geomatics and Information Science of Wuhan University , 2012 ,37 (10 ):1236 -1239 .
Magsci
[本文引用: 2]
[4]
Sun G Y Chen X L Jia X P , et al . Combinational build-up index(CBI) for effective impervious surface mapping in urban areas
[J]. IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing , 2015 ,9 (5 ):2081 -2092 .
DOI:10.1109/JSTARS.2015.2478914
URL
[本文引用: 1]
The distribution of urban impervious surface is a significant indicator of the degree of urbanization, as well as a major indicator of environmental quality. Hence, taking advantage of remotely sensed imagery to map impervious surface has become an important topic. Spectral indices have been developed due to its convenience to apply, among which feature extraction approach has shown superiority in reliability and applicability. However, impervious surface is often confused with bare soil when the current existing indices are used as well as their sensor-specific limitations. In this study, a new index, combinational build-up index (CBI), is proposed to extract impervious surface. The new index combines the first component of a principal component analysis (PC1), normalized difference water index (NDWI), and soil-adjusted vegetation index (SAVI), representing high albedo, low albedo, and vegetation, respectively, to reduce the original bands into three thematic-oriented features. The new index was tested using various remote sensing images at different spectral and spatial resolutions. Qualitative and quantitative assessments of the accuracy and separability of CBI, together with the comparison with other existing indices, were performed. The result of this study indicates that the proposed method is able to serve as an effective impervious index and can be applied widely.
[5]
Shahtahmassebi A R Song J Zheng Q , et al . Remote sensing of impervious surface growth:A framework for quantifying urban expansion and re-densification mechanisms
[J]. International Journal of Applied Earth Observation and Geoinformation , 2016 ,46 :94 -112 .
DOI:10.1016/j.jag.2015.11.007
URL
[本文引用: 1]
[6]
Gao Z H Zhang L Liao M S et al . Estimating urban impervious surface percentage with multi-source remote sensing data
[C]//Proceedings of 2009 Joint Urban Remote Sensing Event .Shanghai,China :IEEE , 2009 : 1 -5 .
[本文引用: 1]
[7]
Qiao Y Liu H P Bai M , et al . Extracting impervious surfaces from multi-source satellite imagery based on unified conceptual model by decision tree algorithm
[J]. Science China Technological Sciences , 2010 ,53 (S1 ):68 -74 .
DOI:10.1007/s11431-010-3207-1
URL
[本文引用: 1]
[8]
Cai C Li P J Jin H R . Extraction of urban impervious surface using two-season worldview-2 images:A comparison
[J]. Photogrammetric Engineering and Remote Sensing , 2016 ,82 (5 ):335 -349 .
DOI:10.1016/S0099-1112(16)82014-5
URL
[本文引用: 1]
Although multispectral images acquired during the summer season have been used extensively in impervious surface extraction with relatively high accuracy, the area of impervious surface extracted is generally underestimated. In this study, a quantitative comparison of urban impervious surface extraction was conducted using WorldView-2 images of the summer and winter seasons over two urban areas in a temperate region of Northern China. A hierarchical object-based classification method was adopted to extract urban impervious surfaces. The results showed that the impervious surface extraction from the winter image achieved an accuracy comparable with that from the summer image. However, the area of impervious surface extracted from the winter image was much greater than that from the summer image, which was mainly attributed to seasonal variations of deciduous trees. Therefore, winter images are recommended for impervious surface mapping in temperate regions using very high resolution images.
[9]
Gao Z H Liu X W . Support vector machine and object-oriented classification for urban impervious surface extraction from satellite imagery
[C]//Proceeding of the Third International Conference on Agro-Geoinformatics .Beijing,China :IEEE , 2014 : 1 -5 .
[本文引用: 1]
[10]
Zhang Y Z Zhang H S Lin H . Improving the impervious surface estimation with combined use of optical and SAR remote sensing images
[J]. Remote Sensing of Environment , 2014 ,141 :155 -167 .
DOI:10.1016/j.rse.2013.10.028
URL
[本文引用: 1]
[11]
Kotarba A Z Aleksandrowicz S . Impervious surface detection with nighttime photography from the international space station
[J]. Remote Sensing of Environment , 2016 ,176 :295 -307 .
DOI:10.1016/j.rse.2016.02.009
URL
[本文引用: 1]
61Nighttime photography from the ISS was used to detect impervious surfaces.61The ISS-based approach correctly estimated the extent of impervious surfaces.61Overall accuracy of ISS-based map was 82%, while only 42% for unadjusted OLS map.61Imperviousness degree estimated on per-pixel basis with ISS was accurate to ±20%.61Use of census data improved the ISS-based estimation of imperviousness degree.
[12]
Hodgson M E Jensen J R Tullis J A , et al . Synergistic use of LiDAR and color aerial photography for mapping urban parcel imperviousness
[J]. Photogrammetric Engineering and Remote Sensing , 2003 ,69 (9 ):973 -980 .
DOI:10.14358/PERS.69.9.973
URL
[本文引用: 1]
The imperviousness of land parcels was mapped and evaluated using high spatial resolution digitized color orthophotography and surface-cover height extracted from multiple-return lidar data. Maximum-likelihood classification, spectral clustering, and expert system approaches were used to extract the impervious information from the datasets. Classified pixels (or segments) were aggregated to parcels. The classification model based on the use of both the orthophotography and lidar-derived surface-cover height yielded impervious surface results for all parcels that were within 15 percent of reference data. The standard error for the rule-based per-pixel model was 7.15 percent with a maximum observed error of 18.94 percent. The maximum-likelihood per-pixel classification yielded a lower standard error of 6.62 percent with a maximum of 14.16 percent. The regression slope (i.e., 0.955) for the maximum-likelihood per-pixel model indicated a near perfect relationship between observed and predicted imperviousness. The additional effort of using a per-segment approach with a rule-based classification resulted in slightly better standard error (5.85 percent) and a near-perfect regression slope (1.016).
[13]
Im J Lu Z Y Rhee J , et al . Impervious surface quantification using a synjournal of artificial immune networks and decision/regression trees from multi-sensor data
[J]. Remote Sensing of Environment , 2012 ,117 :102 -113 .
DOI:10.1016/j.rse.2011.06.024
URL
[本文引用: 1]
[14]
徐涵秋 . 一种快速提取不透水面的新型遥感指数
[J]. 武汉大学学报(信息科学版) , 2008 ,33 (11 ):1150 -1153 .
URL
Magsci
[本文引用: 1]
首次采用复合波段的形式创建了归一化差值不透水面指数(normalized difference impervious surfaceindex,NDISI)。它可以用于大区域范围内快速、自动地提取不透水面信息。通过Landsat ETM+和ASTER两种影像的实验证明,新的指数能够有效地增强不透水面信息,并具有较高的提取精度。
Xu H Q . A new remote sensing index for fastly extracting impervious surface information
[J]. Geomatics and Information Science of Wuhan University , 2008 ,33 (11 ):1150 -1153 .
Magsci
[本文引用: 1]
[15]
Rouse J W Haas R H Schell J A et al . Monitoring vegetation systems in the great plains with erts
[C]//Proceedings of Third Earth Resources Technology Satellite-1 Symposium .Greenbelt :NASA , 1974 ,351 :309 -317 .
[本文引用: 1]
[16]
Xu H Q . Modification of normalised difference water index(NDWI) to enhance open water features in remotely sensed imagery
[J]. International Journal of Remote Sensing , 2006 ,27 (14 ):3025 -3033 .
DOI:10.1080/01431160600589179
URL
[本文引用: 1]
[17]
龚亮 , 张永生 , 李正国 , 等 . 基于强度信息聚类的机载LiDAR点云道路提取
[J].测绘通报 , 2011 (9 ):15 -17,24 .
[本文引用: 2]
Gong L Zhang Y S Li Z G , et al . Automated road extraction from LiDAR data based on clustering of intensity [J].Bulletin of Surveying and Mapping , 2011 (9 ):15 -17,24 .
[本文引用: 2]
[18]
彭检贵 , 马洪超 , 高广 , 等 . 利用机载LiDAR点云数据提取城区道路
[J].测绘通报 , 2012 (9 ):16 -19 .
[本文引用: 1]
Peng J G Ma H C Gao G , et al . Road extraction from airborne LiDAR point clouds data in urban area [J].Bulletin of Surveying and Mapping , 2012 (9 ):16 -19 .
[本文引用: 1]
[19]
Boykov Y Y Jolly M P Interactive graph cuts for optimal boundary and region segmentation of objects in N-D images
[C]//Proceedings of 2001 IEEE International Conference on Computer Vision .Vancouver :IEEE , 2001 : 105 -112 .
[本文引用: 1]
[20]
Rother C Kolmogorov V Blake A . “GrabCut”:Interactive foreground extraction using iterated graph cuts
[J]. ACM Transactions on Graphics , 2004 ,23 (3 ):309 -314 .
DOI:10.1145/1015706
URL
[本文引用: 1]
论北京暴雨洪灾与城市防涝
1
2012
... 近年来城市防灾减灾任务艰巨,城市暴雨涝灾常发.城镇建设面积迅速扩张、以植被为主的自然景观逐渐被人工不透水面所取代,是导致城市发生暴雨内涝的重要影响因素[1 ] .不透水面指天然或人造的难以被水穿透的地表,城市不透水面主要由人工地物构成,如屋顶、停车场、水泥及沥青路面等.不透水面作为衡量城市化程度和环境质量的重要指标,受到越来越多的关注.研究表明,遥感数据在地物提取方面有着很大的潜力和优势,利用遥感手段提取不透水面已成为研究热点之一[2 ] . ...
论北京暴雨洪灾与城市防涝
1
2012
... 近年来城市防灾减灾任务艰巨,城市暴雨涝灾常发.城镇建设面积迅速扩张、以植被为主的自然景观逐渐被人工不透水面所取代,是导致城市发生暴雨内涝的重要影响因素[1 ] .不透水面指天然或人造的难以被水穿透的地表,城市不透水面主要由人工地物构成,如屋顶、停车场、水泥及沥青路面等.不透水面作为衡量城市化程度和环境质量的重要指标,受到越来越多的关注.研究表明,遥感数据在地物提取方面有着很大的潜力和优势,利用遥感手段提取不透水面已成为研究热点之一[2 ] . ...
城市不透水面遥感研究进展
1
2012
... 近年来城市防灾减灾任务艰巨,城市暴雨涝灾常发.城镇建设面积迅速扩张、以植被为主的自然景观逐渐被人工不透水面所取代,是导致城市发生暴雨内涝的重要影响因素[1 ] .不透水面指天然或人造的难以被水穿透的地表,城市不透水面主要由人工地物构成,如屋顶、停车场、水泥及沥青路面等.不透水面作为衡量城市化程度和环境质量的重要指标,受到越来越多的关注.研究表明,遥感数据在地物提取方面有着很大的潜力和优势,利用遥感手段提取不透水面已成为研究热点之一[2 ] . ...
城市不透水面遥感研究进展
1
2012
... 近年来城市防灾减灾任务艰巨,城市暴雨涝灾常发.城镇建设面积迅速扩张、以植被为主的自然景观逐渐被人工不透水面所取代,是导致城市发生暴雨内涝的重要影响因素[1 ] .不透水面指天然或人造的难以被水穿透的地表,城市不透水面主要由人工地物构成,如屋顶、停车场、水泥及沥青路面等.不透水面作为衡量城市化程度和环境质量的重要指标,受到越来越多的关注.研究表明,遥感数据在地物提取方面有着很大的潜力和优势,利用遥感手段提取不透水面已成为研究热点之一[2 ] . ...
Fuzzy ARTMAP算法在城市不透水面估算中的应用研究
2
2012
... 目前常用的不透水面遥感提取方法有人工解译法、指数模型法、回归分析法、线性光谱混合模型法、决策树分类法、人工神经网络和面向对象法等.这些研究取得了较好的成果,但是在精确高效提取不透水面方面仍存在不足.如: 基于V-I-S模型利用线性光谱混合分解将光谱信息分解成高反照度、低反照度、植被和土壤端元,但是由于光谱相似造成端元之间存在不确定性[3 ,4 ,5 ] ; 回归分析法对于不同时相不同区域难以实现自适应归一化,且对数据噪声敏感[3 ,6 -7 ] ; 人工智能算法在遥感影像上应用还不够成熟,网络连接权值的物理意义不易推断,学习收敛速度慢,且对训练样本的数量和质量有较高要求[8 ] ; 面向对象法虽然包含了形状、纹理和上下文关系等空间信息,但是分割尺度的确定对分类精度影响很大[9 ] .基于上述方法,也开展了大量改进研究,以提高算法的鲁棒性和精度.同时,传统不透水面提取的研究方法只采用单一卫星数据源,没有利用多源数据的优势.因此引入了夜间数据、合成孔径雷达数据(synthetic aperture Radar,SAR)、机载激光点云数据(light detection and ranging,LiDAR)等新型数据.将这些数据与传统遥感影像相结合[10 ,11 ] ,已成为了当前不透水面提取的重要手段.Hodgson等[12 ] 利用航片数据和LiDAR数据,对城区不透水面进行了提取,相比使用传统分类方法精度得到了提高; Im等[13 ] 使用WorldView数据和LiDAR数据对城市不透水面进行了提取,既丰富了信息源,也提高了不透水面的提取精度. ...
... [3 ,6 -7 ]; 人工智能算法在遥感影像上应用还不够成熟,网络连接权值的物理意义不易推断,学习收敛速度慢,且对训练样本的数量和质量有较高要求[8 ] ; 面向对象法虽然包含了形状、纹理和上下文关系等空间信息,但是分割尺度的确定对分类精度影响很大[9 ] .基于上述方法,也开展了大量改进研究,以提高算法的鲁棒性和精度.同时,传统不透水面提取的研究方法只采用单一卫星数据源,没有利用多源数据的优势.因此引入了夜间数据、合成孔径雷达数据(synthetic aperture Radar,SAR)、机载激光点云数据(light detection and ranging,LiDAR)等新型数据.将这些数据与传统遥感影像相结合[10 ,11 ] ,已成为了当前不透水面提取的重要手段.Hodgson等[12 ] 利用航片数据和LiDAR数据,对城区不透水面进行了提取,相比使用传统分类方法精度得到了提高; Im等[13 ] 使用WorldView数据和LiDAR数据对城市不透水面进行了提取,既丰富了信息源,也提高了不透水面的提取精度. ...
Fuzzy ARTMAP算法在城市不透水面估算中的应用研究
2
2012
... 目前常用的不透水面遥感提取方法有人工解译法、指数模型法、回归分析法、线性光谱混合模型法、决策树分类法、人工神经网络和面向对象法等.这些研究取得了较好的成果,但是在精确高效提取不透水面方面仍存在不足.如: 基于V-I-S模型利用线性光谱混合分解将光谱信息分解成高反照度、低反照度、植被和土壤端元,但是由于光谱相似造成端元之间存在不确定性[3 ,4 ,5 ] ; 回归分析法对于不同时相不同区域难以实现自适应归一化,且对数据噪声敏感[3 ,6 -7 ] ; 人工智能算法在遥感影像上应用还不够成熟,网络连接权值的物理意义不易推断,学习收敛速度慢,且对训练样本的数量和质量有较高要求[8 ] ; 面向对象法虽然包含了形状、纹理和上下文关系等空间信息,但是分割尺度的确定对分类精度影响很大[9 ] .基于上述方法,也开展了大量改进研究,以提高算法的鲁棒性和精度.同时,传统不透水面提取的研究方法只采用单一卫星数据源,没有利用多源数据的优势.因此引入了夜间数据、合成孔径雷达数据(synthetic aperture Radar,SAR)、机载激光点云数据(light detection and ranging,LiDAR)等新型数据.将这些数据与传统遥感影像相结合[10 ,11 ] ,已成为了当前不透水面提取的重要手段.Hodgson等[12 ] 利用航片数据和LiDAR数据,对城区不透水面进行了提取,相比使用传统分类方法精度得到了提高; Im等[13 ] 使用WorldView数据和LiDAR数据对城市不透水面进行了提取,既丰富了信息源,也提高了不透水面的提取精度. ...
... [3 ,6 -7 ]; 人工智能算法在遥感影像上应用还不够成熟,网络连接权值的物理意义不易推断,学习收敛速度慢,且对训练样本的数量和质量有较高要求[8 ] ; 面向对象法虽然包含了形状、纹理和上下文关系等空间信息,但是分割尺度的确定对分类精度影响很大[9 ] .基于上述方法,也开展了大量改进研究,以提高算法的鲁棒性和精度.同时,传统不透水面提取的研究方法只采用单一卫星数据源,没有利用多源数据的优势.因此引入了夜间数据、合成孔径雷达数据(synthetic aperture Radar,SAR)、机载激光点云数据(light detection and ranging,LiDAR)等新型数据.将这些数据与传统遥感影像相结合[10 ,11 ] ,已成为了当前不透水面提取的重要手段.Hodgson等[12 ] 利用航片数据和LiDAR数据,对城区不透水面进行了提取,相比使用传统分类方法精度得到了提高; Im等[13 ] 使用WorldView数据和LiDAR数据对城市不透水面进行了提取,既丰富了信息源,也提高了不透水面的提取精度. ...
Combinational build-up index(CBI) for effective impervious surface mapping in urban areas
1
2015
... 目前常用的不透水面遥感提取方法有人工解译法、指数模型法、回归分析法、线性光谱混合模型法、决策树分类法、人工神经网络和面向对象法等.这些研究取得了较好的成果,但是在精确高效提取不透水面方面仍存在不足.如: 基于V-I-S模型利用线性光谱混合分解将光谱信息分解成高反照度、低反照度、植被和土壤端元,但是由于光谱相似造成端元之间存在不确定性[3 ,4 ,5 ] ; 回归分析法对于不同时相不同区域难以实现自适应归一化,且对数据噪声敏感[3 ,6 -7 ] ; 人工智能算法在遥感影像上应用还不够成熟,网络连接权值的物理意义不易推断,学习收敛速度慢,且对训练样本的数量和质量有较高要求[8 ] ; 面向对象法虽然包含了形状、纹理和上下文关系等空间信息,但是分割尺度的确定对分类精度影响很大[9 ] .基于上述方法,也开展了大量改进研究,以提高算法的鲁棒性和精度.同时,传统不透水面提取的研究方法只采用单一卫星数据源,没有利用多源数据的优势.因此引入了夜间数据、合成孔径雷达数据(synthetic aperture Radar,SAR)、机载激光点云数据(light detection and ranging,LiDAR)等新型数据.将这些数据与传统遥感影像相结合[10 ,11 ] ,已成为了当前不透水面提取的重要手段.Hodgson等[12 ] 利用航片数据和LiDAR数据,对城区不透水面进行了提取,相比使用传统分类方法精度得到了提高; Im等[13 ] 使用WorldView数据和LiDAR数据对城市不透水面进行了提取,既丰富了信息源,也提高了不透水面的提取精度. ...
Remote sensing of impervious surface growth:A framework for quantifying urban expansion and re-densification mechanisms
1
2016
... 目前常用的不透水面遥感提取方法有人工解译法、指数模型法、回归分析法、线性光谱混合模型法、决策树分类法、人工神经网络和面向对象法等.这些研究取得了较好的成果,但是在精确高效提取不透水面方面仍存在不足.如: 基于V-I-S模型利用线性光谱混合分解将光谱信息分解成高反照度、低反照度、植被和土壤端元,但是由于光谱相似造成端元之间存在不确定性[3 ,4 ,5 ] ; 回归分析法对于不同时相不同区域难以实现自适应归一化,且对数据噪声敏感[3 ,6 -7 ] ; 人工智能算法在遥感影像上应用还不够成熟,网络连接权值的物理意义不易推断,学习收敛速度慢,且对训练样本的数量和质量有较高要求[8 ] ; 面向对象法虽然包含了形状、纹理和上下文关系等空间信息,但是分割尺度的确定对分类精度影响很大[9 ] .基于上述方法,也开展了大量改进研究,以提高算法的鲁棒性和精度.同时,传统不透水面提取的研究方法只采用单一卫星数据源,没有利用多源数据的优势.因此引入了夜间数据、合成孔径雷达数据(synthetic aperture Radar,SAR)、机载激光点云数据(light detection and ranging,LiDAR)等新型数据.将这些数据与传统遥感影像相结合[10 ,11 ] ,已成为了当前不透水面提取的重要手段.Hodgson等[12 ] 利用航片数据和LiDAR数据,对城区不透水面进行了提取,相比使用传统分类方法精度得到了提高; Im等[13 ] 使用WorldView数据和LiDAR数据对城市不透水面进行了提取,既丰富了信息源,也提高了不透水面的提取精度. ...
Estimating urban impervious surface percentage with multi-source remote sensing data
1
2009
... 目前常用的不透水面遥感提取方法有人工解译法、指数模型法、回归分析法、线性光谱混合模型法、决策树分类法、人工神经网络和面向对象法等.这些研究取得了较好的成果,但是在精确高效提取不透水面方面仍存在不足.如: 基于V-I-S模型利用线性光谱混合分解将光谱信息分解成高反照度、低反照度、植被和土壤端元,但是由于光谱相似造成端元之间存在不确定性[3 ,4 ,5 ] ; 回归分析法对于不同时相不同区域难以实现自适应归一化,且对数据噪声敏感[3 ,6 -7 ] ; 人工智能算法在遥感影像上应用还不够成熟,网络连接权值的物理意义不易推断,学习收敛速度慢,且对训练样本的数量和质量有较高要求[8 ] ; 面向对象法虽然包含了形状、纹理和上下文关系等空间信息,但是分割尺度的确定对分类精度影响很大[9 ] .基于上述方法,也开展了大量改进研究,以提高算法的鲁棒性和精度.同时,传统不透水面提取的研究方法只采用单一卫星数据源,没有利用多源数据的优势.因此引入了夜间数据、合成孔径雷达数据(synthetic aperture Radar,SAR)、机载激光点云数据(light detection and ranging,LiDAR)等新型数据.将这些数据与传统遥感影像相结合[10 ,11 ] ,已成为了当前不透水面提取的重要手段.Hodgson等[12 ] 利用航片数据和LiDAR数据,对城区不透水面进行了提取,相比使用传统分类方法精度得到了提高; Im等[13 ] 使用WorldView数据和LiDAR数据对城市不透水面进行了提取,既丰富了信息源,也提高了不透水面的提取精度. ...
Extracting impervious surfaces from multi-source satellite imagery based on unified conceptual model by decision tree algorithm
1
2010
... 目前常用的不透水面遥感提取方法有人工解译法、指数模型法、回归分析法、线性光谱混合模型法、决策树分类法、人工神经网络和面向对象法等.这些研究取得了较好的成果,但是在精确高效提取不透水面方面仍存在不足.如: 基于V-I-S模型利用线性光谱混合分解将光谱信息分解成高反照度、低反照度、植被和土壤端元,但是由于光谱相似造成端元之间存在不确定性[3 ,4 ,5 ] ; 回归分析法对于不同时相不同区域难以实现自适应归一化,且对数据噪声敏感[3 ,6 -7 ] ; 人工智能算法在遥感影像上应用还不够成熟,网络连接权值的物理意义不易推断,学习收敛速度慢,且对训练样本的数量和质量有较高要求[8 ] ; 面向对象法虽然包含了形状、纹理和上下文关系等空间信息,但是分割尺度的确定对分类精度影响很大[9 ] .基于上述方法,也开展了大量改进研究,以提高算法的鲁棒性和精度.同时,传统不透水面提取的研究方法只采用单一卫星数据源,没有利用多源数据的优势.因此引入了夜间数据、合成孔径雷达数据(synthetic aperture Radar,SAR)、机载激光点云数据(light detection and ranging,LiDAR)等新型数据.将这些数据与传统遥感影像相结合[10 ,11 ] ,已成为了当前不透水面提取的重要手段.Hodgson等[12 ] 利用航片数据和LiDAR数据,对城区不透水面进行了提取,相比使用传统分类方法精度得到了提高; Im等[13 ] 使用WorldView数据和LiDAR数据对城市不透水面进行了提取,既丰富了信息源,也提高了不透水面的提取精度. ...
Extraction of urban impervious surface using two-season worldview-2 images:A comparison
1
2016
... 目前常用的不透水面遥感提取方法有人工解译法、指数模型法、回归分析法、线性光谱混合模型法、决策树分类法、人工神经网络和面向对象法等.这些研究取得了较好的成果,但是在精确高效提取不透水面方面仍存在不足.如: 基于V-I-S模型利用线性光谱混合分解将光谱信息分解成高反照度、低反照度、植被和土壤端元,但是由于光谱相似造成端元之间存在不确定性[3 ,4 ,5 ] ; 回归分析法对于不同时相不同区域难以实现自适应归一化,且对数据噪声敏感[3 ,6 -7 ] ; 人工智能算法在遥感影像上应用还不够成熟,网络连接权值的物理意义不易推断,学习收敛速度慢,且对训练样本的数量和质量有较高要求[8 ] ; 面向对象法虽然包含了形状、纹理和上下文关系等空间信息,但是分割尺度的确定对分类精度影响很大[9 ] .基于上述方法,也开展了大量改进研究,以提高算法的鲁棒性和精度.同时,传统不透水面提取的研究方法只采用单一卫星数据源,没有利用多源数据的优势.因此引入了夜间数据、合成孔径雷达数据(synthetic aperture Radar,SAR)、机载激光点云数据(light detection and ranging,LiDAR)等新型数据.将这些数据与传统遥感影像相结合[10 ,11 ] ,已成为了当前不透水面提取的重要手段.Hodgson等[12 ] 利用航片数据和LiDAR数据,对城区不透水面进行了提取,相比使用传统分类方法精度得到了提高; Im等[13 ] 使用WorldView数据和LiDAR数据对城市不透水面进行了提取,既丰富了信息源,也提高了不透水面的提取精度. ...
Support vector machine and object-oriented classification for urban impervious surface extraction from satellite imagery
1
2014
... 目前常用的不透水面遥感提取方法有人工解译法、指数模型法、回归分析法、线性光谱混合模型法、决策树分类法、人工神经网络和面向对象法等.这些研究取得了较好的成果,但是在精确高效提取不透水面方面仍存在不足.如: 基于V-I-S模型利用线性光谱混合分解将光谱信息分解成高反照度、低反照度、植被和土壤端元,但是由于光谱相似造成端元之间存在不确定性[3 ,4 ,5 ] ; 回归分析法对于不同时相不同区域难以实现自适应归一化,且对数据噪声敏感[3 ,6 -7 ] ; 人工智能算法在遥感影像上应用还不够成熟,网络连接权值的物理意义不易推断,学习收敛速度慢,且对训练样本的数量和质量有较高要求[8 ] ; 面向对象法虽然包含了形状、纹理和上下文关系等空间信息,但是分割尺度的确定对分类精度影响很大[9 ] .基于上述方法,也开展了大量改进研究,以提高算法的鲁棒性和精度.同时,传统不透水面提取的研究方法只采用单一卫星数据源,没有利用多源数据的优势.因此引入了夜间数据、合成孔径雷达数据(synthetic aperture Radar,SAR)、机载激光点云数据(light detection and ranging,LiDAR)等新型数据.将这些数据与传统遥感影像相结合[10 ,11 ] ,已成为了当前不透水面提取的重要手段.Hodgson等[12 ] 利用航片数据和LiDAR数据,对城区不透水面进行了提取,相比使用传统分类方法精度得到了提高; Im等[13 ] 使用WorldView数据和LiDAR数据对城市不透水面进行了提取,既丰富了信息源,也提高了不透水面的提取精度. ...
Improving the impervious surface estimation with combined use of optical and SAR remote sensing images
1
2014
... 目前常用的不透水面遥感提取方法有人工解译法、指数模型法、回归分析法、线性光谱混合模型法、决策树分类法、人工神经网络和面向对象法等.这些研究取得了较好的成果,但是在精确高效提取不透水面方面仍存在不足.如: 基于V-I-S模型利用线性光谱混合分解将光谱信息分解成高反照度、低反照度、植被和土壤端元,但是由于光谱相似造成端元之间存在不确定性[3 ,4 ,5 ] ; 回归分析法对于不同时相不同区域难以实现自适应归一化,且对数据噪声敏感[3 ,6 -7 ] ; 人工智能算法在遥感影像上应用还不够成熟,网络连接权值的物理意义不易推断,学习收敛速度慢,且对训练样本的数量和质量有较高要求[8 ] ; 面向对象法虽然包含了形状、纹理和上下文关系等空间信息,但是分割尺度的确定对分类精度影响很大[9 ] .基于上述方法,也开展了大量改进研究,以提高算法的鲁棒性和精度.同时,传统不透水面提取的研究方法只采用单一卫星数据源,没有利用多源数据的优势.因此引入了夜间数据、合成孔径雷达数据(synthetic aperture Radar,SAR)、机载激光点云数据(light detection and ranging,LiDAR)等新型数据.将这些数据与传统遥感影像相结合[10 ,11 ] ,已成为了当前不透水面提取的重要手段.Hodgson等[12 ] 利用航片数据和LiDAR数据,对城区不透水面进行了提取,相比使用传统分类方法精度得到了提高; Im等[13 ] 使用WorldView数据和LiDAR数据对城市不透水面进行了提取,既丰富了信息源,也提高了不透水面的提取精度. ...
Impervious surface detection with nighttime photography from the international space station
1
2016
... 目前常用的不透水面遥感提取方法有人工解译法、指数模型法、回归分析法、线性光谱混合模型法、决策树分类法、人工神经网络和面向对象法等.这些研究取得了较好的成果,但是在精确高效提取不透水面方面仍存在不足.如: 基于V-I-S模型利用线性光谱混合分解将光谱信息分解成高反照度、低反照度、植被和土壤端元,但是由于光谱相似造成端元之间存在不确定性[3 ,4 ,5 ] ; 回归分析法对于不同时相不同区域难以实现自适应归一化,且对数据噪声敏感[3 ,6 -7 ] ; 人工智能算法在遥感影像上应用还不够成熟,网络连接权值的物理意义不易推断,学习收敛速度慢,且对训练样本的数量和质量有较高要求[8 ] ; 面向对象法虽然包含了形状、纹理和上下文关系等空间信息,但是分割尺度的确定对分类精度影响很大[9 ] .基于上述方法,也开展了大量改进研究,以提高算法的鲁棒性和精度.同时,传统不透水面提取的研究方法只采用单一卫星数据源,没有利用多源数据的优势.因此引入了夜间数据、合成孔径雷达数据(synthetic aperture Radar,SAR)、机载激光点云数据(light detection and ranging,LiDAR)等新型数据.将这些数据与传统遥感影像相结合[10 ,11 ] ,已成为了当前不透水面提取的重要手段.Hodgson等[12 ] 利用航片数据和LiDAR数据,对城区不透水面进行了提取,相比使用传统分类方法精度得到了提高; Im等[13 ] 使用WorldView数据和LiDAR数据对城市不透水面进行了提取,既丰富了信息源,也提高了不透水面的提取精度. ...
Synergistic use of LiDAR and color aerial photography for mapping urban parcel imperviousness
1
2003
... 目前常用的不透水面遥感提取方法有人工解译法、指数模型法、回归分析法、线性光谱混合模型法、决策树分类法、人工神经网络和面向对象法等.这些研究取得了较好的成果,但是在精确高效提取不透水面方面仍存在不足.如: 基于V-I-S模型利用线性光谱混合分解将光谱信息分解成高反照度、低反照度、植被和土壤端元,但是由于光谱相似造成端元之间存在不确定性[3 ,4 ,5 ] ; 回归分析法对于不同时相不同区域难以实现自适应归一化,且对数据噪声敏感[3 ,6 -7 ] ; 人工智能算法在遥感影像上应用还不够成熟,网络连接权值的物理意义不易推断,学习收敛速度慢,且对训练样本的数量和质量有较高要求[8 ] ; 面向对象法虽然包含了形状、纹理和上下文关系等空间信息,但是分割尺度的确定对分类精度影响很大[9 ] .基于上述方法,也开展了大量改进研究,以提高算法的鲁棒性和精度.同时,传统不透水面提取的研究方法只采用单一卫星数据源,没有利用多源数据的优势.因此引入了夜间数据、合成孔径雷达数据(synthetic aperture Radar,SAR)、机载激光点云数据(light detection and ranging,LiDAR)等新型数据.将这些数据与传统遥感影像相结合[10 ,11 ] ,已成为了当前不透水面提取的重要手段.Hodgson等[12 ] 利用航片数据和LiDAR数据,对城区不透水面进行了提取,相比使用传统分类方法精度得到了提高; Im等[13 ] 使用WorldView数据和LiDAR数据对城市不透水面进行了提取,既丰富了信息源,也提高了不透水面的提取精度. ...
Impervious surface quantification using a synjournal of artificial immune networks and decision/regression trees from multi-sensor data
1
2012
... 目前常用的不透水面遥感提取方法有人工解译法、指数模型法、回归分析法、线性光谱混合模型法、决策树分类法、人工神经网络和面向对象法等.这些研究取得了较好的成果,但是在精确高效提取不透水面方面仍存在不足.如: 基于V-I-S模型利用线性光谱混合分解将光谱信息分解成高反照度、低反照度、植被和土壤端元,但是由于光谱相似造成端元之间存在不确定性[3 ,4 ,5 ] ; 回归分析法对于不同时相不同区域难以实现自适应归一化,且对数据噪声敏感[3 ,6 -7 ] ; 人工智能算法在遥感影像上应用还不够成熟,网络连接权值的物理意义不易推断,学习收敛速度慢,且对训练样本的数量和质量有较高要求[8 ] ; 面向对象法虽然包含了形状、纹理和上下文关系等空间信息,但是分割尺度的确定对分类精度影响很大[9 ] .基于上述方法,也开展了大量改进研究,以提高算法的鲁棒性和精度.同时,传统不透水面提取的研究方法只采用单一卫星数据源,没有利用多源数据的优势.因此引入了夜间数据、合成孔径雷达数据(synthetic aperture Radar,SAR)、机载激光点云数据(light detection and ranging,LiDAR)等新型数据.将这些数据与传统遥感影像相结合[10 ,11 ] ,已成为了当前不透水面提取的重要手段.Hodgson等[12 ] 利用航片数据和LiDAR数据,对城区不透水面进行了提取,相比使用传统分类方法精度得到了提高; Im等[13 ] 使用WorldView数据和LiDAR数据对城市不透水面进行了提取,既丰富了信息源,也提高了不透水面的提取精度. ...
一种快速提取不透水面的新型遥感指数
1
2008
... 由于不透水面普遍在热红外波段辐射率很高,在近红外反射率很低[14 ] ,因此卫星影像可以在不透水面提取方面发挥其光谱特征方面的较大优势.本文将归一化差值植被指数(normalized differential vegetation index,NDVI)、增强型植被指数(enhanced vegetation index,EVI)和改进的归一化差值水体指数(modified normalized differential water index,MNDWI)选作光谱特征参数,用于Grabcut的输入特征和初值获取. ...
一种快速提取不透水面的新型遥感指数
1
2008
... 由于不透水面普遍在热红外波段辐射率很高,在近红外反射率很低[14 ] ,因此卫星影像可以在不透水面提取方面发挥其光谱特征方面的较大优势.本文将归一化差值植被指数(normalized differential vegetation index,NDVI)、增强型植被指数(enhanced vegetation index,EVI)和改进的归一化差值水体指数(modified normalized differential water index,MNDWI)选作光谱特征参数,用于Grabcut的输入特征和初值获取. ...
Monitoring vegetation systems in the great plains with erts
1
1974
... 1)NDVI.通过表现植被强吸收能力的红光波段和表示植被生物量的近红外波段的组合计算,可以使感兴趣地物信息得到增强[15 ] ,其公式为 ...
Modification of normalised difference water index(NDWI) to enhance open water features in remotely sensed imagery
1
2006
... 3)MNDWI.由于土壤、水体和沙土、部分水泥沥青具有类似的光谱特征,单利用NDVI无法准确区分出不透水面,有必要引入水体指数.水体在绿光波段中比红外波段具有更高反射率,MNDVI可以准确提取出水体[16 ] ,其公式为 ...
基于强度信息聚类的机载LiDAR点云道路提取
2
2011
... LiDAR系统可以快速获取具有地表三维坐标及反射强度等信息的密集点云,对于植被、建筑物和道路等地物的精确提取具有重要意义.然而仅依靠高程信息进行分类的可靠性有限,并且强度信息的噪声大,影响因素多,还难以真实反映地物反射率信息[17 ] .因此,可以结合高程和强度信息,将点云信息作为辅助信息参与到不透水面分类过程中. ...
... 2)强度信息.LiDAR强度信息是接收到的目标回波信号形成的图像.沥青、混凝土的回波强度明显区别于植被等自然地物,且在回波特点上,道路点云都为末次回波[18 ] .对于强度值,有学者采取先对样本标定再提取的方法,也有采取聚类方法提取点云数据中的道路[17 ] .基于以上理论,本文首先去除多次回波点,排除一部分非道路点; 然后采取FCM方法利用强度值将道路和植被、裸地分开.同时,在实验过程中,发现道路和建筑物质地均一,回波强度在某一小范围内,而裸地里包含有沙石、土壤和草地等,回波强度起伏较大,因此将回波强度的方差值同强度值一起作为聚类的特征,增强道路信息. ...
基于强度信息聚类的机载LiDAR点云道路提取
2
2011
... LiDAR系统可以快速获取具有地表三维坐标及反射强度等信息的密集点云,对于植被、建筑物和道路等地物的精确提取具有重要意义.然而仅依靠高程信息进行分类的可靠性有限,并且强度信息的噪声大,影响因素多,还难以真实反映地物反射率信息[17 ] .因此,可以结合高程和强度信息,将点云信息作为辅助信息参与到不透水面分类过程中. ...
... 2)强度信息.LiDAR强度信息是接收到的目标回波信号形成的图像.沥青、混凝土的回波强度明显区别于植被等自然地物,且在回波特点上,道路点云都为末次回波[18 ] .对于强度值,有学者采取先对样本标定再提取的方法,也有采取聚类方法提取点云数据中的道路[17 ] .基于以上理论,本文首先去除多次回波点,排除一部分非道路点; 然后采取FCM方法利用强度值将道路和植被、裸地分开.同时,在实验过程中,发现道路和建筑物质地均一,回波强度在某一小范围内,而裸地里包含有沙石、土壤和草地等,回波强度起伏较大,因此将回波强度的方差值同强度值一起作为聚类的特征,增强道路信息. ...
利用机载LiDAR点云数据提取城区道路
1
2012
... 2)强度信息.LiDAR强度信息是接收到的目标回波信号形成的图像.沥青、混凝土的回波强度明显区别于植被等自然地物,且在回波特点上,道路点云都为末次回波[18 ] .对于强度值,有学者采取先对样本标定再提取的方法,也有采取聚类方法提取点云数据中的道路[17 ] .基于以上理论,本文首先去除多次回波点,排除一部分非道路点; 然后采取FCM方法利用强度值将道路和植被、裸地分开.同时,在实验过程中,发现道路和建筑物质地均一,回波强度在某一小范围内,而裸地里包含有沙石、土壤和草地等,回波强度起伏较大,因此将回波强度的方差值同强度值一起作为聚类的特征,增强道路信息. ...
利用机载LiDAR点云数据提取城区道路
1
2012
... 2)强度信息.LiDAR强度信息是接收到的目标回波信号形成的图像.沥青、混凝土的回波强度明显区别于植被等自然地物,且在回波特点上,道路点云都为末次回波[18 ] .对于强度值,有学者采取先对样本标定再提取的方法,也有采取聚类方法提取点云数据中的道路[17 ] .基于以上理论,本文首先去除多次回波点,排除一部分非道路点; 然后采取FCM方法利用强度值将道路和植被、裸地分开.同时,在实验过程中,发现道路和建筑物质地均一,回波强度在某一小范围内,而裸地里包含有沙石、土壤和草地等,回波强度起伏较大,因此将回波强度的方差值同强度值一起作为聚类的特征,增强道路信息. ...
Interactive graph cuts for optimal boundary and region segmentation of objects in N-D images
1
2001
... 图割(Graph cut)是一种基于图论的图像分割方法,其能量最小化框架由Boykov等提出[19 ] ,近年来在计算机视觉领域中被广泛应用.该方法可以很好地将图像的区域和边界信息相结合,建立能量模型,通过最大流最小割算法,从而得到能量最小的分割结果. ...
“GrabCut”:Interactive foreground extraction using iterated graph cuts
1
2004
... Grabcut是在此研究基础上进行了改进,将交互方式从种子点选取变成框选目标,并且引入高斯混合模型进行建模,通过不断分割估计和模型参数学习进行迭代,实现分割[20 ] .其能量函数为 ...



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}