
0 引言
利用三维模型描述和分析地表空间信息被认为是人类掌握地球表面信息最好的方式[1]。建筑物作为城市空间的主要内容,是摄影测量与遥感、计算机视觉等领域研究三维建模的重点对象。目前,获取建筑物空间信息的方式主要有机载LiDAR技术和车载LiDAR技术。机载LiDAR技术可大范围获取建筑物的屋顶信息,但存在缺乏立面信息和屋顶轮廓精度低等缺点,只能重建CityGML标准中由详实的屋顶结构和简易墙面构成的LoD2模型[2]; 车载LiDAR技术能够获取丰富的立面细节并构建建筑物立面模型,与机载LiDAR技术形成优势互补[3]。由详实的屋顶和立面结构构成的LoD3模型在城市规划、光照分析、能源需求估计和房价预测等方面有广泛的应用空间[4],因此研究综合利用机载与车载LiDAR数据生成建筑物精细模型的方法具有重要的理论和应用价值。
目前,利用机载LiDAR数据生成LoD2建筑物模型的研究已臻于完善[5,6,7]。Xiong[8]采用模型驱动的方法,将复杂建筑物的屋顶面根据拓扑图分解为预定义基元库中的基元分别进行模型重建; Zhou等[9]采用2.5D双轮廓法,将建筑物屋顶点云数据扫描转点到二维网格后聚类成超点集,最后构建建筑物的多边形网格模型。利用车载LiDAR数据提取或重建立面的研究也日趋丰富[10]。杨必胜等[11]基于维数特征等局部几何特征对扫描点进行粗分类和分割处理后,根据分割面片的语义信息提取出建筑物立面; 岑子政[12]提出了一种基于八叉树的建筑物立面自动建模算法,将点云数据组织到包围盒中以改善建模效果。目前,综合利用机载与车载LiDAR数据生成LoD3建筑物模型仍处于刚起步阶段。张志超[13]采用半自动的方法配准机载与地面LiDAR数据,之后根据屋顶和立面的形状语法重建建筑物精细模型; 陈焱明[14]首先使用迭代最近点(iterative closest point,ICP)算法初步集成机载与车载LiDAR数据,然后采用基于多尺度格网和结构单元探测的方法重建建筑物屋顶和立面模型,并融合成LoD3模型。这2种方法仅通过重复结构推测窗户的几何信息,也没有重建其他立面细节,不适用于真实表达具有复杂结构的建筑物。
针对立面内容和几何结构不具备显著重复特征的复杂建筑物,提出了一种基于数据驱动的重建策略。该策略的主要贡献有: ①在利用地理空间定位资源实现粗配准的基础上,引入机载与车载LiDAR数据的相互约束,实现了精配准; ②提出了立面包围盒算法,直接定位车载LiDAR数据到对应的建筑物立面,使立面提取简单、高效化; ③通过随机抽样一致算法(random sample consensus,RANSAC)剔除车载LiDAR数据“低于”立面的非立面噪声点,提高了重建结果的正确性; ④基于数据驱动的2.5D双轮廓方法重建建筑物屋顶和立面模型,生成具有窗户和阳台等详实细节的LoD3建筑物模型。
1 原理和方法
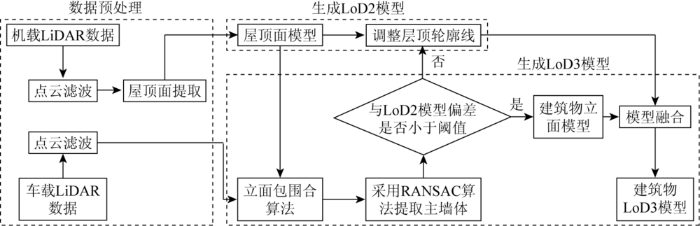
生成城市建筑物LoD3模型的技术流程主要分为3个模块(如图1所示),包括: 数据预处理模块、生成LoD2模型模块和生成LoD3模型模块。
图1
1.1 数据源及其预处理
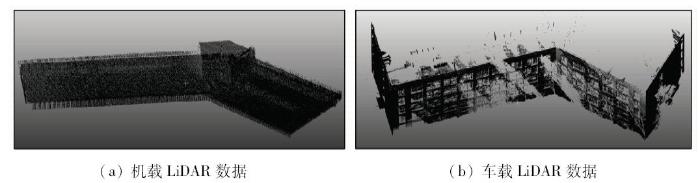
实验数据为武汉大学科技园某栋建筑物的机载与车载LiDAR数据。机载LiDAR数据使用无人机搭载Velodyne 16线三维激光雷达VLP-16采集,点云密度为623 点/m2; 车载LiDAR数据使用RIEGL VZ-400采集,点云密度为95 点/m2。
图2
1.2 LoD2模型生成
1.2.1 降采样
提取屋顶面片点云数据后,首先使用2.5D双轮廓法生成只包含建筑物屋顶信息的LoD2模型。采用该方法需要保证点云数据的2.5D特性,即点云呈水平分布,沿竖直方向投影没有重叠。真实环境得到的扫描数据密度较高且通常不具备2.5D特性,直接使用原始数据处理效率较低,也不能得到理想的LoD2模型。因此,在生成模型前需要对屋顶面片点云数据在高程方向降采样。在一定范围内建立单位边长为
1.2.2 生成屋顶面模型
采用2.5D双轮廓方法得到LoD2模型,需要经过3个主要步骤。
首先,将2.5D点云投影到支持四叉树操作的规则2D格网中进行扫描转换,网格边长设为
其次,使用融合聚类算法自适应生成几何结构。通过最小化2.5D二次误差方程式
式中:
考虑到建筑物的平面特征,对过于破碎化的超点通过子树合并的方法进行几何简化,从而得到新的超点。
最后,将相邻超点两两相连,生成屋顶表面的三角网模型,并将三角网边缘的相邻超点连线投影至地面作为立面墙体,最终生成用三角网表示的LoD2建筑物模型。
1.2.3 边缘规则化
图3

1.3 LoD3模型生成
粗配准得到的车载和机载LiDAR数据仍然存在较大的系统误差,不能直接用于LoD3模型的生成。通过引入几何约束,使车载和机载LiDAR数据较好地吻合。
1.3.1 立面包围盒算法
由图2(b)可见,真实环境中车载LiDAR技术获取的建筑物信息不仅包括在水平方向环绕建筑物的墙体,还有门窗、室内结构和阳台等丰富的细节。门窗一般可视为墙体的内嵌构件,其水平投影和建筑物轮廓线重叠,从门窗结构处获取到的点云一般“低于”墙体结构。室内结构位于建筑物内侧,一般依附于门窗结构,其点云数据整体呈不规则分布。从门窗和室内结构获取到的点云数据视为冗余点。阳台等其他丰富细节可视为墙体的凸出构件,是LoD3模型的重要组成部分。为了保留立面的丰富信息,并使算法具有较好的鲁棒性,提出了一种立面包围盒算法。
基于1.2节规则化后的LoD2模型,立面包围盒算法对模型每一个立面分别进行处理。LoD2模型的立面是1个底边水平、2条侧边竖直的四边形,立面信息都依附在这个四边形上。以该四边形作为基准面沿立面法线方向分别偏移-
1.3.2 生成立面模型
定位到立面上的点云包含丰富的立面信息,其中墙体是最重要的内容。墙体能反映建筑物的轮廓特征,是其他立面信息的依附,也是车载和机载LiDAR数据精配准的关键。墙体本身也可能有复杂的结构,通常呈现为平面的组合结构,其中面积最大的墙体称之为主墙体,其余墙体均可以视为依附于主墙体的平面。提取主墙体的主要步骤为: ①遍历立面包围盒点云,用RANSAC算法提取所有平面; ②计算平面法向量,剔除法向量不水平的平面; ③计算平面面积,面积最大的平面视为候选主墙体; ④剔除低于主墙体的冗余点,其平面距离阈值设为
1.3.3 模型融合
机载与车载LiDAR数据生成的LoD2模型不能完全吻合,存在一定的误差。通常机载LiDAR数据更能反映建筑物的整体轮廓,而车载LiDAR数据的水平精度更高,因此进一步引入两者的相互约束,计算2种数据生成的立面之间的旋转角度和位移距离。若均小于阈值
2 实验结果与分析
实验中所设置的部分参数如表1所示。
表1 实验部分参数设置
Tab.1
| 数据源 | 扫描转换网格边长 | 采样网格边长 | 包围盒偏移距离 | 墙体冗余点平面 距离阈值 | 旋转角度阈值 | 位移距离阈值 |
|---|---|---|---|---|---|---|
| 机载LiDAR数据 | 1 | 0.5 | 1.5 | 0.3 | 5 | 0.05 |
| 车载LiDAR数据 | 0.4 | 0.1 |
基于机载与车载LiDAR数据,通过本文方法LoD3建筑物模拟重建结果及其实景影像如图4所示。
图4

图4
建筑物影像及模拟重建结果
Fig.4
Images and simulation reconstruction result of the building
实验结果表明,通过本文方法重建的建筑物模型能够较详实地反映建筑物的真实形态。由图4可知,本文方法可以生成阳台(A)、窗户(B)和屋顶(C)的几何模型。异源数据生成的屋顶和立面紧密贴合,没有出现错位的现象,实现了机载和车载LiDAR数据的精配准。
根据剔除冗余点后的原始点云到模型表面的平均距离评定模型的几何精度,其中车载LiDAR数据到模型表面的平均距离为0.02 m,机载LiDAR数据到模型表面的平均距离为0.04 m。定量分析表明,本文方法重建的建筑物模型具有可靠的几何精度。但是,由于本文方法完全基于数据驱动,建模结果对数据质量比较敏感。如图4(c)中D处是由于遮挡造成的模型空洞,E处是由于窗户反射、噪声等原因造成的模型异常。但这些问题都可以通过提高数据质量解决。
3 结论
本文提出一种融合机载和车载LiDAR数据生成LoD3建筑物模型的策略,实现了城市建筑物的自动化建模。该方法采取数据驱动的策略,通过融合聚类的方法生成能够表达建筑物几何结构的特征点,并将特征点构建成三角网模型,使模型能够详实反映屋顶、门窗和阳台等建筑物要素的真实形态。
提出的立面包围盒算法,快速建立了车载LiDAR数据和建筑物立面之间的关系。通过引入机载和车载LiDAR数据的相互约束进行精配准,既加快了重建速度,也使屋顶和立面模型能够紧密贴合,最终生成具有较高重建精度的LoD3建筑物模型。
但是由于缺乏语义信息,难以从模型中提取出门窗等立面细节进行后续处理,也难以将门窗形成的立面空洞与遮挡形成的数据缺失加以区分,对建筑物模型的质量优化和模型分析尚有很大桎梏。后续研究中将引入建筑物各要素的语义信息,进一步改善模型质量。
参考文献
从数字地球到智慧地球
[J].
From digital earth to smart earth
[J].
OGC City Geography Markup Language (CityGML) Encoding Standard
[S].
面向车载激光扫描点云快速分类的点云特征图像生成方法
[J].
DOI:10.1017/S0004972710001772
URL
[本文引用: 1]

以车载激光点云数据为研究对象,提出一种适合于其快速分类与目标提取的点云特征图像生成方 法。首先将扫描区域进行平面规则格网投影,通过分析格网内部点云的空间分布特征(平面距离、高程差异、点密集程度等)确定激光扫描点的定权,从而生成车载 激光扫描点云的特征图像。利用生成的点云特征图像,可采用阈值分割、轮廓提取与跟踪等手段提取图像分割的建筑物目标的边界,从而确定边界内部点云数据,实 现目标分类与提取。本文以Optech公司的车载激光扫描数据为试验对象,验证本文提出方法的可行性和实用性。
A classification-oriented method of feature image generation for vehicle-borne laser scanning point clouds
[J].
Automatic conversion of IFC datasets to geometrically and semantically correct CityGML LOD3 buildings
[J].
DOI:10.1111/tgis.12162
URL
[本文引用: 1]
Abstract Although the international standard CityGML has five levels of detail (LODs), the vast majority of available models are the coarse ones (up to LOD2, i.e. block-shaped buildings with roofs). LOD3 and LOD4 models, which contain architectural details such as balconies, windows and rooms, rarely exist because, unlike coarser LODs, their construction requires several datasets that must be acquired with different technologies, and often extensive manual work is needed. In this article we investigate an alternative to obtaining CityGML LOD3 models: the automatic conversion from already existing architectural models (stored in the IFC format). Existing conversion algorithms mostly focus on the semantic mappings and convert all the geometries, which yields CityGML models having poor usability in practice (spatial analysis, for instance, is not possible). We present a conversion algorithm that accurately applies the correct semantics from IFC models and that constructs valid CityGML LOD3 buildings by performing a series of geometric operations in 3D. We have implemented our algorithm and we demonstrate its effectiveness with several real-world datasets. We also propose specific improvements to both standards to foster their integration in the future.
A survey of urban reconstruction
[J].
DOI:10.1111/cgf.12077
URL
[本文引用: 1]
This paper provides a comprehensive overview of urban reconstruction. While there exists a considerable body of literature, this topic is still under active research. The work reviewed in this survey stems from the following three research communities: computer graphics, computer vision and photogrammetry and remote sensing. Our goal is to provide a survey that will help researchers to better position their own work in the context of existing solutions, and to help newcomers and practitioners in computer graphics to quickly gain an overview of this vast field. Further, we would like to bring the mentioned research communities to even more interdisciplinary work, since the reconstruction problem itself is by far not solved.
Joint simultaneous reconstruction of regularized building superstructures from low-density LiDAR data using ICP
A global solution to topological reconstruction of building roof models from airborne LiDAR point clouds
Reconstructing and Correcting 3D Building Models Using Roof Topology Graphs
[D].
2.5D dual contouring:A robust approach to creating building models from aerial LiDAR point clouds
利用车载移动测量数据的建筑物立面建模方法
[J].
DOI:10.13203/j .whu g is20150173
URL
[本文引用: 1]
withthedevelo pmentofsensorsandrisin gdemandforthree-dimensionals p atialinforma-tion,3dcit yreconstructionhasbecomeahotto p icinresearchanda pp lications.afacade,asp artofthebuildin gmodel,containsdetailedandintuitiveinformation,whichcouldbeeffectivel ycollectedb ymobilema pp in gs y stemswithhi g hresolutiononstreetview.however,thecurrentp rocessin gca p a-bilit yformobilema pp in gdataisnotsuitablefortheconsistentl yg rowin gandmassiveamountofdataac q uiredb ymobilema pp in gs y stems.therefore,thereisstillhu g ep otentialandsustainablevalueintheresearchof3dbuildin gmodelin gusin gmobilema pp in gdata.thisp a p erreviewstheexistin gre-latedresearchactivitiesbothathomeandabroad.firstl y,thep a p eranal y zesthefeaturesofmobilema pp in gdata.secondl y,thep a p erdiscussesthemainal g orithmsintheworkflowofbuildin gfacadereconstructionandenhancementusin g3dp ointcloudsandima g ese q uence.finall y,wep ointoutthelimitationsoftheexistin gmethodsandthechallen g esforfutureresearch.
A survey on facade modeling using LiDAR point clouds and image sequences collected by mobile mapping systems
[J].
从车载激光扫描数据中提取复杂建筑物立面的方法
[J].提出一种从车载激光扫描数据中提取复杂建筑物立面的新方法。该方法首先利用"维数特征"方法确定每个扫描点的最佳邻域,进而计算得到每个扫描点精确的局部几何特征(法向量、主方向、维数特征);然后基于"维数特征"对扫描点进行粗分类,并设置相应的生长准则对不同类别的扫描数据分别进行分割;最后综合建筑物立面的语义知识对建筑物立面区域进行精确提取。试验结果和比较分析表明,本文的方法不但能提取建筑物平面和非平面立面,而且可消除点密度差异(变化)对建筑物立面提取结果的影响,提高建筑物立面提取的正确率和完整性。
Extracting complex building facades from mobile laser scanning data
[J].
基于八叉树的车载激光点云数据建筑物立面建模算法研究
[D].
Research on the Building Facade Modeling Algorithm of the Vehicle-mounted Laser-point Cloud Data Based on Octree
[D].
融合机载与地面LIDAR数据的建筑物三维重建研究
[D].
Three-dimensional Reconstruction of Buildings with Airborne and Ground LIDAR Data
[D].
基于机载与车载LiDAR数据的建筑物模型多视三维重建研究
[D].
Three-dimensional Multi-view Reconstruction of the Building Model Based on Airborne and Vehicle-mounted LiDAR Data
[D].
An easy-to-use airborne LiDAR data filtering method based on cloth simulation
[J].
DOI:10.3390/rs8060501
URL
[本文引用: 1]
Separating point clouds into ground and non-ground measurements is an essential step to generate digital terrain models (DTMs) from airborne LiDAR (light detection and ranging) data. However, most filtering algorithms need to carefully set up a number of complicated parameters to achieve high accuracy. In this paper, we present a new filtering method which only needs a few easy-to-set integer and Boolean parameters. Within the proposed approach, a LiDAR point cloud is inverted, and then a rigid cloth is used to cover the inverted surface. By analyzing the interactions between the cloth nodes and the corresponding LiDAR points, the locations of the cloth nodes can be determined to generate an approximation of the ground surface. Finally, the ground points can be extracted from the LiDAR point cloud by comparing the original LiDAR points and the generated surface. Benchmark datasets provided by ISPRS (International Society for Photogrammetry and Remote Sensing) working Group III/3 are used to validate the proposed filtering method, and the experimental results yield an average total error of 4.58%, which is comparable with most of the state-of-the-art filtering algorithms. The proposed easy-to-use filtering method may help the users without much experience to use LiDAR data and related technology in their own applications more easily.
Fast and extensible building modeling from airborne LiDAR data
垂距法与道格拉斯-普克法删除冗余顶点效率的比较
[J].
DOI:10.3969/j.issn.1004-3810.2014.08.033
URL
[本文引用: 1]
在计算机地图制图和地理信息工程等领域,通常要对线要素和面要素边界几何数据中所包含的冗余顶点进行删除,以达到减少存储开销、提高处理效率和改善图形可视化效果等目的。为了满足人们选择一种快速删除线要素冗余顶点算法的需要,在简要介绍目前常用的两种线要素压缩算法——垂距法和道格拉斯-普克法的原理及特点的基础上,对利用这两种算法实施冗余顶点删除处理的效率进行实例测试与比较。
The efficiency comparison of methods between perpendicular distance and Douglas-Peucker in deleting redundant vertexes
[J].

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}