

0 引言
本研究提出了利用低空航空器搭载多传感器获取影像、激光点云和视频等多源遥感数据,进行配准、融合处理后,快速检测各类地物的数学精度及评估地理要素属性正确性的方法,可有效解决人工外业检查效率低、客观性受人为因素影响大的问题。
1 基于多源遥感数据的质量检测流程
基于多源遥感数据的地理信息产品质量检测总体流程如图1所示。
图1
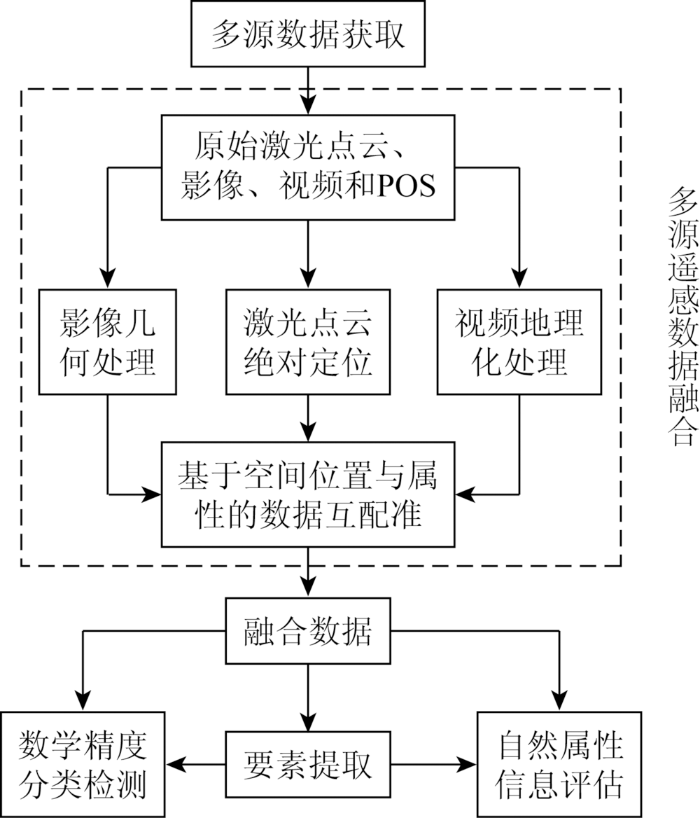
具体步骤如下: ①多源数据获取,先根据待检地理信息产品的空间范围确定航摄范围,然后利用搭载有激光雷达、相机和定位定姿系统等设备的航空器获取点云、影像、视频以及位置与姿态数据(position and orientation system,POS)等多源数据; ②多源数据融合,基于POS与点云、影像、视频等数据的时间关联关系,利用相关几何模型地理化处理多源遥感数据,随后基于空间位置与属性配准、融合处理多源遥感数据和待检数据; ③地理信息产品质量检测,联动显示、叠加比对融合数据与待检数据,采集同名特征点分类检测地物的数学精度,利用目视解译法评估地物的自然属性。
2 基于位置与属性的多源数据融合
机载原始影像、视频和激光雷达数据不具有空间关联关系,不利于多源低空遥感数据的信息整合,也不便于与待检数据比对分析,因此,在执行质量检测前,需配准处理激光点云、影像、视频和待检数据。
2.1 多源遥感数据地理化处理
2.1.1 机载影像几何处理
基于几何约束条件快速匹配影像,在POS数据辅助下进行空三平差,随后对测区机载影像进行正射纠正、镶嵌、匀色,生成正射影像。
2.1.2 机载激光点云绝对定位
基于机载激光雷达对地定位模型,融合处理POS数据的点位信息、姿态信息与激光扫描仪获取的角度、距离信息,自动生成具有绝对高精度三维空间坐标的激光点云。
具体方法为: 假设空中有一指向地面的向量
图2
激光点的绝对定位模型表达式为
式中:
2.1.3 机载视频数据地理化处理
视频数据地理化处理的关键是建立视频数据和实际地理位置的对应关系。首先,根据视频创建时间和帧率推算每一帧视频影像的创建时间; 然后,以视频帧的时间戳为基准,线性拟合POS数据获取该视频帧的位置与姿态信息; 最后,根据机载影像几何定位模型确定该视频帧的地理位置。
由于视频数据属于高时间分辨率影像数据,存在大量重复的冗余信息,必须按照一定的规则提取关键帧,常用规则有图像内容法、镜头边界法和运动分析法等。本文在使用视频数据时直接将其当作一幅幅影像,用于补充常规影像数据视角与地物细节信息的不足。
2.2 多源数据互配准
2.2.1 多源遥感数据互配准
由于执行低空遥感任务的设备均需进行检校,因此,多传感器设备相对地面的空间位置关系稳定可靠,基于几何模型地理化处理获取的多源遥感数据,相互间空间位置差异较小,地物属性特征具有较强的一致性,因此可基于各数据间的空间位置关系,快速配准、融合处理多源遥感数据。
2.2.2 融合数据与待检数据配准
当待检数据空间位置不存在系统性误差时,可直接基于融合数据、待检数据的空间位置关系配准待检数据与融合数据,实现待检数据与融合数据的联动显示、叠加分析,进而评测产品的质量。
当待检数据存在较大的系统性误差时,须先基于待检数据与融合数据上同名地物属性特征的一致性,选取多对同名地物特征点; 然后,利用仿射变换纠正待检数据,进而实现融合数据与待检数据的配准。当然,检测地理信息产品数学精度时需考虑仿射变换对数学精度检测结果的影响。仿射变换采用6参数,其表达式为
式中:
3 质量检测
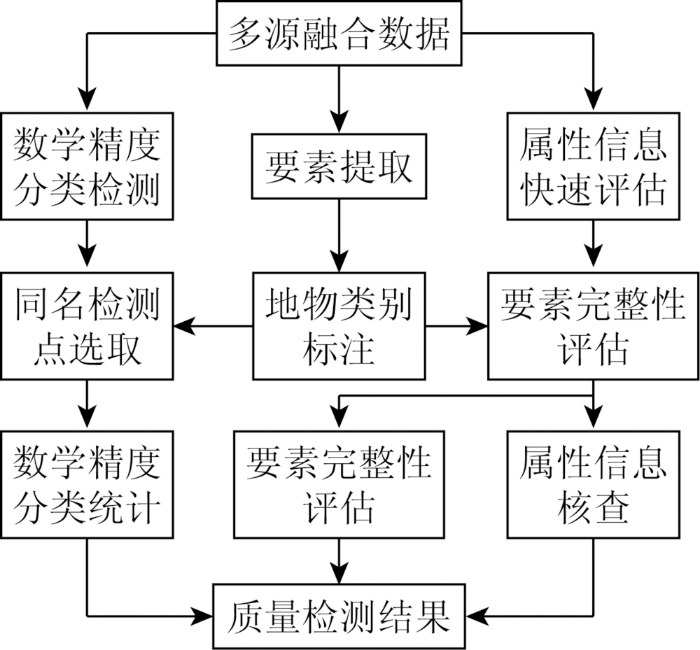
基于配准融合后的激光点云和影像等数据,首先执行要素提取操作; 然后利用要素分类信息分类检测地理信息产品的数学精度,评估要素属性信息的正确性。具体步骤如图3所示。
图3
3.1 要素提取
综合利用影像与视频数据的光谱特征和激光点云的高程信息与反射强度信息,将激光点云数据分为建筑物、道路等外业巡检重点关注的地物类别,为地物数学精度分类检测和属性信息快速评估奠定基础。但当获取得到的多源遥感数据质量较好,在影像与激光点云上容易直观分辨出地物类别时,可不执行要素提取操作。
3.2 地物类别标注
为便于快速分类检测数学精度和评估地物属性信息的正确性,基于ArcEngine研发了属性值标注功能模块,该模块能够标注显示待检地理要素的属性值或基于对照表自动显示出要素编码对应的中文地物类别。
3.3 数学精度分类检测
数学精度分类检测主要分为同名检测点选取和数学精度分类统计2个步骤。
3.3.1 同名检测点选取
基于机载激光点云与影像数据的高程和纹理信息,结合要素类别信息,分类选取特征明显、同名点对应明确的三维检测点。在选取同名检测点时,可以根据实际地物情况选择能够突出地物局部特征的点云渲染模式,如按类别渲染、高程渲染和强度渲染等。
3.3.2 数学精度分类统计
利用已选取的同名检测点,依据相关地理信息产品质量检验标准,按类别统计地物数学精度,数学精度采用中误差表达,其表达式为
式中:
3.4 属性信息快速评估
要素属性信息快速评估主要包括要素完整性评估和属性信息核查2个方面,评估方式为“基于空间位置分析评估要素属性值和融合数据地物特征的一致性”。
3.4.1 要素完整性评估
基于机载影像与视频数据面状、高空间分辨率的纹理信息,快速目视解译地物属性,检测待检数据是否存在地物多余、地物遗漏以及地物类别错误等问题。
3.4.2 属性信息核查
利用激光点云数据提供的三维地形信息,核查待检数据地物高程相关属性值的正确性; 或结合影像纹理提供的车道数、路宽等信息,评估相关要素属性信息的正确性。
4 实例分析
为验证所提地理信息产品质量检测技术的有效性,本研究基于ArcEngine自主研制了一套地理信息产品质量检测软件系统。该系统具有多源遥感数据叠加或联动显示、点云渲染显示、数学精度分类检测和属性信息快速评估等功能。采用的试验数据为位于四川省都江堰市某区域的多源低空遥感数据,面积为25 km2,待检数据为2017年的地理国情监测成果,试验数据详细信息如表1所示。
表1 试验数据信息
Tab.1
| 数据类型 | 数据量/MB | 面积/km2 | 时间 | 备注 |
|---|---|---|---|---|
| 监测数据 | 41.7 | 1 208 | 2017年 | 待检数据 |
| 激光点云 | 1 034.2 | 25 | 2017年4月 | 参考数据 |
| 影像数据 | 1 925.1 | 25 | 2017年4月 | 参考数据 |
4.1 数学精度分类检测
基于多源融合数据分类选取数学精度同名检测点,如图4所示。
图4

检测步骤为: 基于空间位置联动显示待检数据、激光点云与影像,然后分公路、城市道路、建筑物和水系等类别,依次在待检数据和参考数据上选取特征明显的同名检测点,选取足够的检测点后,执行一键式地物数学精度分类统计,统计结果如图5所示。
图5
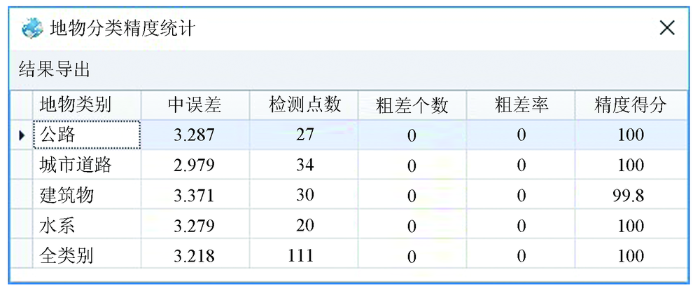
从数学精度统计结果可以看出,公路的中误差为3.287 m,城市道路的中误差为2.979 m,建筑物的中误差3.371 m,水系的中误差为3.279 m,全类别的中误差为3.218 m,精确反映了该区域地理国情监测成果总体及各类别地物的数学精度状况。
4.2 属性信息快速评估
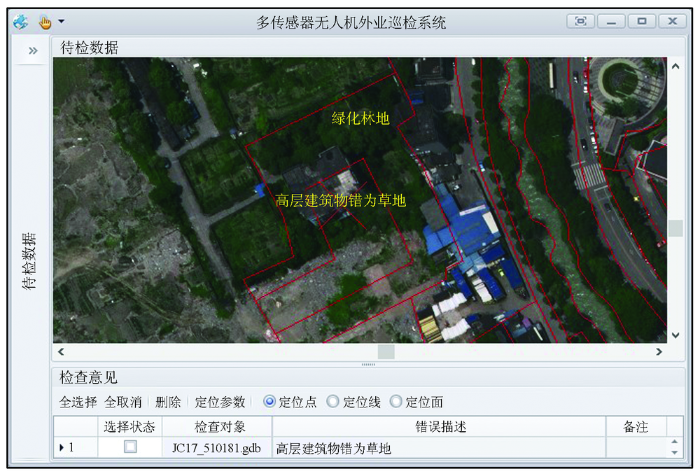
4.2.1 要素完整性评估
基于空间位置将待检成果与具有精细纹理信息的影像透明化叠加,并标注待检地理要素的地物类别,经人工目视解译,可以明显看出图6中待检成果遗漏重要高层建筑物。
图6
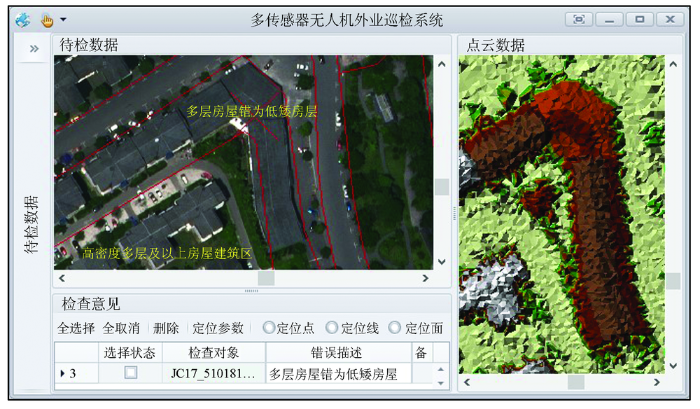
4.2.2 属性信息核查
基于空间位置联动显示待检数据与激光点云数据,通过读取激光点云上建筑物与其周边地表的高程,并计算两者的差值,可以判断该建筑物的“地理国情信息分类码”属性值错为“低矮房屋”,实际为“多层房屋”,如图7所示。
图7
4.3 结果分析
为评估所提方法的检测效率和可靠性,针对上述试验从时间、检测结果2个方面与人工外业检测方式进行了对比分析。
4.3.1 质量检测效率
检测数据获取及处理时间对比结果如表2所示。
表2 检测数据获取及处理时间对比
Tab.2
| 方法 | 获取时间 | 数据融合处理时间 | 数学精度检测时间 | 属性评估时间 |
|---|---|---|---|---|
| 本文方法 | 约12.0 | 约6.0 | 约4.0 | 约6.0 |
| 人工外业 | 约80.0 | — | 约4.0 | 约4.0 |
从表2可以看出,同样获取覆盖25 km2地表范围内全地物类别、且能用于数学精度检测与属性评估的数据,本文方法共需约28 h,传统人工方式需约88 h,本文所提方法获取检测数据的效率约是传统人工方式的3.2倍,大幅度提高了检测数据获取效率,为大范围、大数据量地理信息产品的质量检测评估提供了高效手段。
4.3.2 质量检测可靠性
从产品数学精度检测结果(表3)可以看出,2种地物数学精度检测方式得到的中误差分别为3.2 m和3.0 m,数值非常接近,说明本文方法与人工外业检测得到的数学精度较一致,都具有较高可信度。同时,本文方法是按公路、城市道路、建筑物、水系及全地物类别评测产品的数学精度的,而传统人工外业检测仅统计了产品的总体数学精度,且本文方法融合数据能够提供的备选数学精度检测点达1 000余个,为待检数据数学精度全面检测提供了充足的参考数据源,但是传统人工外业检测若另需数学精度检测点,仍需再次进行外业采集。
表3 产品数学精度检测结果对比
Tab.3
| 方法 | 检测点数/个 | 中误差/m | 评价方式 |
|---|---|---|---|
| 本文方法 | 111 | 3.2 | 全类别 |
| 人工外业 | 100 | 3.0 | 归为一类 |
从产品属性评估结果(表4)可以看出,本文方法与传统人工外业检测出的属性错误总数分别为50个和35个,传统人工外业检测相比本文方法漏检测15个错误,漏检比例为30%。经逐个对比分析2种方法的错误记录发现: 人工外业检测中漏检测的错误均位于地形条件复杂、道路不通达、质检人员难以到达的特殊区域,而本文方法可直接从空中视角俯瞰此类区域。
Tab.4 Comparison of attribute evaluation results(个)
| 方法 | 错漏总数 | 城区错漏数 | 城郊错漏数 |
|---|---|---|---|
| 本文方法 | 50 | 30 | 20 |
| 人工外业 | 35 | 28 | 7 |
因此,本文方法相比传统人工外业检测,在地物的数学精度检测与属性评估方面具有全面、分类、精确等优点,大幅提升了地理信息产品质量检测的可靠性,并满足了地理信息产品数学精度精细化分类检测的新需要。
5 结论
针对现有地理信息产品巡检方式劳动强度大、成本高、效率低、客观性差等问题,本研究提出了一种基于低空多源遥感数据的地理信息要素数学精度分类检测和属性信息快速评估方法,并基于Arc-Engine自主研制了一套地理信息产品质量检测软件系统。经实例验证,本文方法相比传统人工外业检测方式,具有效率高、可靠性好、结果可溯源等优势,同时,还可以降低质检人员的外业工作量,减少质检人员的安全隐患。在大幅提升质量检测的客观性、科学性方面,具有良好的应用价值。
参考文献
关于新型测绘的探索
[J].
The exploration of new surveying and mapping
[J].
信息化地理信息产品检查与评价系统构建技术
[J].
Quality inspection and evaluation technology for geographic information products
[J].
Mini-UAV LiDAR for power line inspection
[J].
A3数码航摄仪飞行重叠度检查
[J].
An overlap check method for A3 digital aerial camera
[J].
机载LiDAR点云数据与遥感影像配准的方法研究
[D].
Research on Registration of LiDAR Point Data and Remote Sensing Images
[D].
机载LiDAR点云与遥感影像融合的地物分类技术研究
[D].
Research on Classification Technologies of Land Cover by Fusing Airborne LiDAR Point Clouds and Remote Sensing Imagery
[D].
机载LiDAR点云数据与影像数据融合
[J].
Data fusion of point cloud and aerial image derived from LiDAR system
[J].
基于机载LiDAR点云的真正射影像生成方法研究
[D].
Research on Generation Method of True Ortho Based on Airborne LiDAR Point Cloud
[D].
多层次地理视频语义模型
[J].
DOI:10.11947/j.AGCS.2015.20140176
Magsci
[本文引用: 1]

<p>针对公共安全应急响应中支持推理、挖掘和关联分析的地理视频建模难题,提出了一种显式表达视频变化的多层次地理视频语义模型,并用UML图进行描述。该模型的特点是:改变了传统视频流整体语义描述方法,通过面向变化的三域(特征域-行为过程域-事件域)定义地理视频语义的层次结构和数据的层次表达;在各层次语义描述中将地理环境语义与视频内容语义有机结合,支持多地理视频数据的关联表示。以公共安全事件监控视频为例阐明了模型的实用性和有效性。</p>
Hierarchical semantic model of geovideo
[J].
激光点云与航空影像融合分类
[J].
Fusion classification of laser point cloud and airborne image
[J].
机载LiDAR点云数据滤波与分类技术研究
[D].
Research on Filtering and Classification of Airborne LiDAR Data
[D].

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}