
0 引言
我国的海岸线长达1.8万多km,海岸带地区人口密集,城镇化率高,是我国经济最发达的地区。海岸带日趋频繁的人类活动超出了资源环境的承载能力[1]。沿海城市发展、产业布局规划、重大工程选址、海岸带生态环境保护、地质变化监测和环境整治与修复都需要精确的水深数据和海陆一体的地形数据支撑[2]。传统的水深测量主要使用船载单波束、多波束声纳测量,但船载平台难以在水深过浅、礁石密布的复杂近岸地形区开展作业工作。机载激光雷达可以突破地面环境限制,同步获取全覆盖、水陆一体激光数据,解决地形信息的陆海衔接问题,填补了目前在水陆衔接区域缺乏精确地形信息的空白。机载激光雷达水深测量系统,如CZMIL(coastal zone mapping and imaging LiDAR) Nova测量精度达到IHO 1 a标准[3]。资料表明机载激光雷达测深系统200 h的工作量相当于一艘常规测量船13 a的工作量,而费用只是同样测量面积的1/5[4]。
本文对机载激光雷达水深测量系统在中国海岸带水域测深潜力进行评估。使用MODIS反演的中国海岸带海域水体慢衰减系数Kd(490 nm)数据结合全球海洋通用制图指导委员会发布的水深数据GEBCO(general bathymetric chart of the oceans)为基础,提取机载激光雷达测深系统在中国近海可穿透水底区,并对测深潜力进行分类,最后依托中国自然资源航空物探遥感中心引进的CZMIL Nova系统获取实测数据进行实验验证,以期对机载激光雷达测深系统在中国海域开展大规模应用规划、决策提供基础支撑。
1 机载激光雷达测深系统CZMIL Nova
1.1 机载激光雷达测深系统发展历程
20世纪70年代以前,机载激光雷达水深测量技术主要被军方用来探测潜艇。1969年雪城大学的Hickman进行了激光点云分类工作。20世纪70年代,主要有美国的国家航空航天局和海军、加拿大CCRS和OPTECH、澳大利亚的WRE和RAN、瑞典的FOA等机构或者公司开展了相关的技术研究,并研制了最早一批机载激光雷达水深测量系统,如AOL,WERLADS-1,WERLADS-2和Mark-2等[9,10]。随着激光传感器、惯性测量单元、计算机、点云滤波和分类算法等硬软件技术的发展,机载激光雷达测深系统开始进入商业化应用阶段,目前最新一代产品包括Optech公司的CZMIL Nova系统、徕卡的HawkEye III系统、Riegl推出的VQ-880-G系统及Fugro推出的LADS HD系统[11,12]。
国内在20世纪90年代以来也有相关学者对水深测量进行了研究。2003年华中科技大学研制了我国第一套机载激光测深系统; 2013年上海光机所等单位研制了机载双频激光雷达系统样机,由海洋测绘和陆地测绘2台激光器组成,其中海洋测绘激光器是系统的核心,输出近红外和蓝绿双波长激光,分别用于测量海面和海底的反射信号,最大测量深度为50 m[12]。但是,目前我国自主研制的机载激光测深系统距离商业化还有一定的距离。
1.2 CZMIL Nova系统结构
机载激光雷达水深测量系统通过集成蓝绿激光传感器、惯性测量单元和GNSS实现对目标的测量。该系统测量示意图如图1所示。
图1
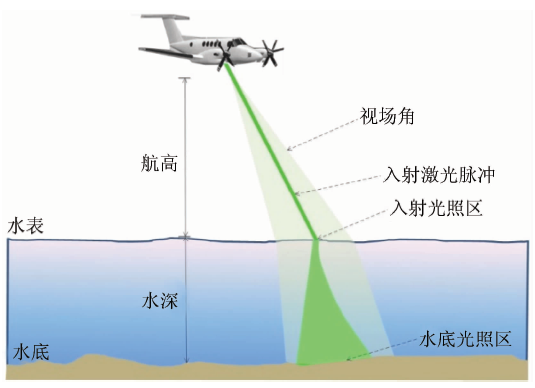
从图1中可以看出,激光器向水体发射脉冲,经过在大气与水体往返回到传感器。激光脉冲传输过程中在水表面和水底(如果穿透)会有较强的反射,在回波的波形中呈现为波峰。通过2次强回波解算出水表高程以及水底高程,间接得到瞬时水深。
CZMIL最初是Optech公司为美国陆军工程师兵团(US Army Corps of Engineers,USACE)的美国全国海岸带制图计划(national coastal mapping program,NCMP)研制的机载激光雷达测深系统。已有实测数据证明CZMIL在浅海和浑浊水域有较好的表现[13]。CZMIL Nova为Optech公司的最新型产品,其激光脉冲由波长532 nm的绿激光以及1 064 nm的红外激光组成。测深所用的绿激光分为8个通道,由7个浅水通道和1个深水通道组成,每一组激光雷达探测中,7个通道按顺序依次发射并接收回波。CZMIL Nova除了激光传感器,还集成了高光谱传感器和数字相机,因此除了激光点云、高程和影像等基础成果,还可以基于高光谱数据开展水色遥感及其融合应用,例如基于激光点云和高光谱水底反射率开展水底底质分类研究[14,15]。
依托“海洋地质保障工程配套装备”项目,根据中国自然资源航空物探遥感中心定制需求,Optech公司于2017研制了新一代CZMIL Nova系统(图2)。该系统集成了激光传感器、CASI高光谱仪和数字相机(Phase one RS1000)。此外,还提升了激光传感器回波接收的宽度,新设备能接收到更强(表面反射)和更弱(水底反射)的激光回波信号; 优化了激光传感器的光电管,减弱了波形数据中的噪声,有利于识别出能量更小的真实地物回波; 532 nm的测深波段选用新的干涉滤波器,降低太阳辐射背景噪声,使检测器通道的信号增加了30%,得到了更多信号的同时提高了信噪比,提升了新系统的最大测深能力。
图2
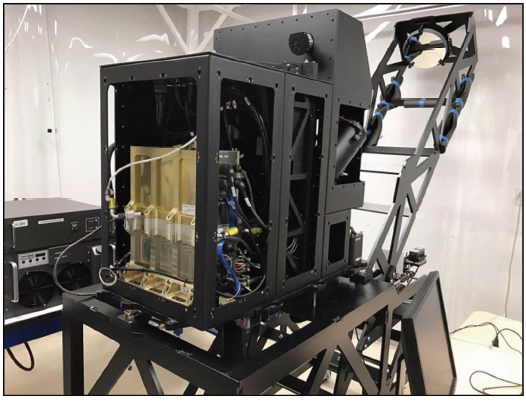
图2
新一代CZMIL Nova系统集成
Fig.2
Integration testing of the new generation CZMIL Nova system
2 理论测深计算
2.1 水体漫衰减系数Kd及Kd(490 nm)
水体漫衰减系数Kd是水体表观光学量和固有光学量随深度变化的反映[16]。漫衰减系数与水体中的悬浮物、叶绿素、黄色物质含量和成分密切相关,漫衰减系数Kd可用于估算机载激光雷达对水体穿透能力。具体公式为
式中: Kd(λ,z)为电磁波在波长λ、水下深度z处的漫衰减系数; Ed(λ,z)为z处的下行辐照度[17]。
由于受成本或效率限制,难以对Kd值进行大面积直接测量,在估算机载激光雷达理论测深时,通常用与激光雷达脉冲波长相近的卫星数据(如490 nm波长)反演结果Kd(490 nm)代替。
半分析法是Kd遥感反演的经典算法,通过遥感反射比反演吸收系数和后向散射系数,然后由吸收系数和后向散射系数以及边界条件计算漫衰减系数。这种方法的反演精度很大程度上依赖于固有光学量的反演准确性,模型建立过程比较复杂,需要精确测量遥感反射比。
经验算法直接建立漫衰减系数与遥感反射比等表观光学参量之间的统计关系,反演模型公式为
式中: Kw为纯水的漫衰减系数,值约为0.016 6 m-1; Lw(λ1)与Lw(λ2)分别为相近蓝绿波段的水辐亮度和归一化离水辐亮度; A和B分别为统计回归系数[17]。
中等空间分辨率成像光谱仪(moderate-resolution imaging spectroradiometer,MODIS)是目前水深遥感领域广泛应用的卫星传感器,主要搭载在1999年和2002年发射的Terra和Aqua卫星上,MODIS每隔1~2 d即可获取全球覆盖的多光谱数据。基于MODIS数据的分辨率和重访周期,用其反演的Kd(490 nm)值进行机载激光雷达测深估算,以及较大范围的测深能力分析。从MODIS官网可获取Aqua MODIS 2014年10月平均Kd(490 nm)示意图,如图3所示。从图3中可以看出,主要的大型内陆湖泊、沿岸的海域Kd值较大,随向远海过渡Kd(490 nm)值逐渐减小。中国海域,沿海污染较重,整体趋势以长江口为界,北方比南方Kd(490 nm)更大。由于影响水体漫衰减系数的固体悬浮物、叶绿素等物质容易受到洋流、季节变化、降雨及海浪等因素影响,Kd(490 nm)在不同时间的变化较大。
图3
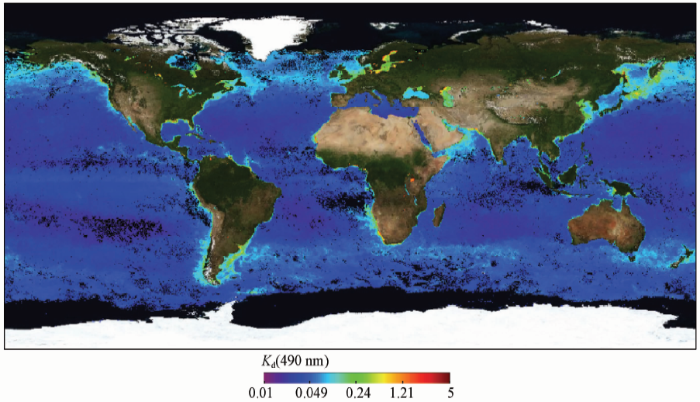
图3
MODIS反演全球Kd(490 nm)结果示意图
Fig.3
Inversion result of Kd (490 nm) using MODIS data
2.2 激光测深潜力区域计算及分类
通过基于Aqua MODIS反演的Kd(490 nm)值计算出中国海域的理论测深,与GEBCO全球数据库的中国海域数据进行对比,根据实际测深与GEBCO深度的比值来划分中国海域激光雷达测深潜力区域。
CZMIL不同水体的理论测深计算公式为
式中: Dmax为最大测深值; C为指标系数。
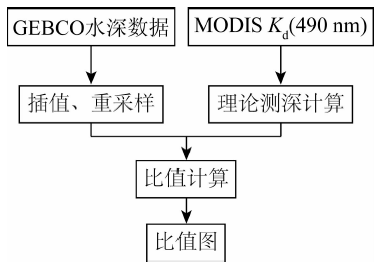
理论测深与GEBCO水深数据比值计算流程如图4所示。首先,由于短期的Kd值可能变化差异较大,因此选用MODIS Kd(490 nm)2018年6—9月的平均值栅格数据,与CZMIL Nova实测数据获取时间相近,数据空间分辨率为4 km; 其次,根据式(3)计算得到CZMIL理论最大测深值; 然后,对GEBCO点状水深数据进行插值生成栅格数据,将其与CZMIL理论最大测深数据进行配准,使用三次卷积插值法对GEBCO栅格数据进行重采样,得到4 km空间分辨率的GEBCO水深数据; 最后,计算坐标相同栅格的理论测深与GEBCO水深数据的比值,得到比值结果。
图4
根据理论最大测深与GEBCO水深的比值,将可作业区域进一步划分为4类,如图5所示。
图5
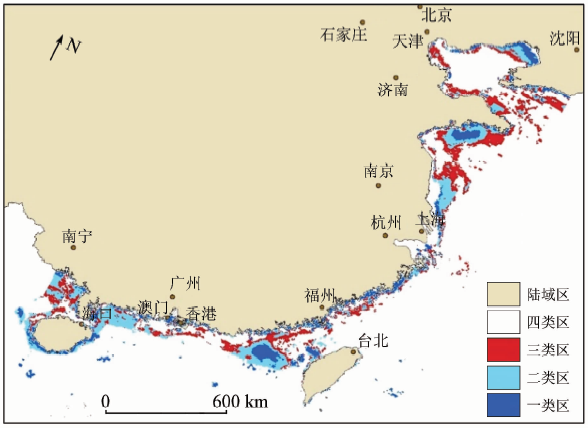
图5
中国局部海域测深潜力分类示意图
Fig.5
Classification of potential detection depth in partial sea of China
四类区: 小于1倍比值区域,即最大理论测深小于GEBCO测深,机载激光雷达在该区域难以穿透到水底。三类区: 1~1.3倍比值区域,由于卫星反演Kd与真实Kd存在误差,本文使用的Kd(490 nm)是经验算法反演结果,其与实际测量值绝对值平均误差约为30%[18,19],因此在该区域可能存在部分区域激光无法穿透到水底。二类区: 1.3~2倍比值区域,CZMIL Nova的测深指标C为在水底部反射率达到15%的前提下的数值,因此在该区域可能因为水底部反射率过低导致不能得到水底回波。一类区: 大于2倍比值区域,机载激光雷达在该区域具有大面积作业的潜力。经统计计算,我国机载激光雷达CZMIL Nova理论测深大于GEBCO水深的区域总面积为21.19万km2,其中三类区面积约为8.15万km2,二类区面积约为8.27万km2,一类区面积约为4.77万km2。适合大面积开展海陆一体地形测量的海岸带区域为海南岛文昌—东方段、北海及雷州半岛东西岸、山东半岛日照—青岛段、辽东湾银州—绥中段,结合Kd(490 nm)与CZMIL Nova理论最大测深估算,对应上述4个区域的测深范围分别为20~40 m,10~20 m,20~25 m,10~15 m水深以浅。
3 CZMIL Nova测深实验
图6
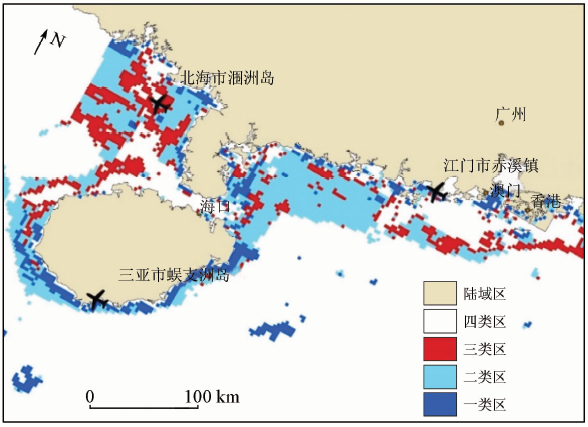
表1 实验数据分布
Tab.1
| 实验区 | 地理坐标 | 测深潜 力分类 | 参考Kd/ m-1 | 数据获取时间 |
|---|---|---|---|---|
| 三亚市蜈支洲岛 | N18.32°,E109.77° | 一类区 | <0.2 | 2018年4月 |
| 北海市涠洲岛 | N21.45°,E109.43° | 二类、三类区 | [0.2,0.8] | 2018年11月 |
| 江门市赤溪镇 | N21.92°,E113.32° | 三类、四类区 | >0.8 | 2018年8月 |
三亚市蜈支洲岛海域水体清澈,海岸类型以生物质、基岩和沙质为主,Kd(490 nm)<0.2 m-1。北海市涠洲岛海域水体较清澈,海岸以沙质为主,部分地区为生物和人工海岸,Kd(490 nm)在0.2~0.8 m-1之间。江门市赤溪镇水体较浑浊,主要以人工海岸为主,海水养殖区较多,Kd(490 nm)>0.8 m-1。如表1所示,CZMIL Nova作业时间与计算测深潜力所用的MODIS数据反演Kd(490 nm)的时间基本一致,作业航速约200 km/h,相对航高为400 m,作业时在飞行航线30 km以内布置全球定位系统(global positioning system,GPS)基站。
使用POSpac MMS软件进行POS数据与GPS基站数据联合解算,使用Hydrofusion软件进行激光数据处理。主要分为4个步骤: ①数据下载,利用飞行设计文件、POS解算结果将原始数据下载到本地硬盘,数据从二进制原始数据转换为标准点云格式; ②点云分类及噪声自动识别,在不同浑浊度水体模型下,根据回波强度及波形数据,将点云分类; ③根据波形数据删除不需要的信息(水中的噪声、鱼群等); ④得到反映真实水底信息的三维点云数据。在此基础上可以生成海陆一体的数字表面模型和数字高程模型。
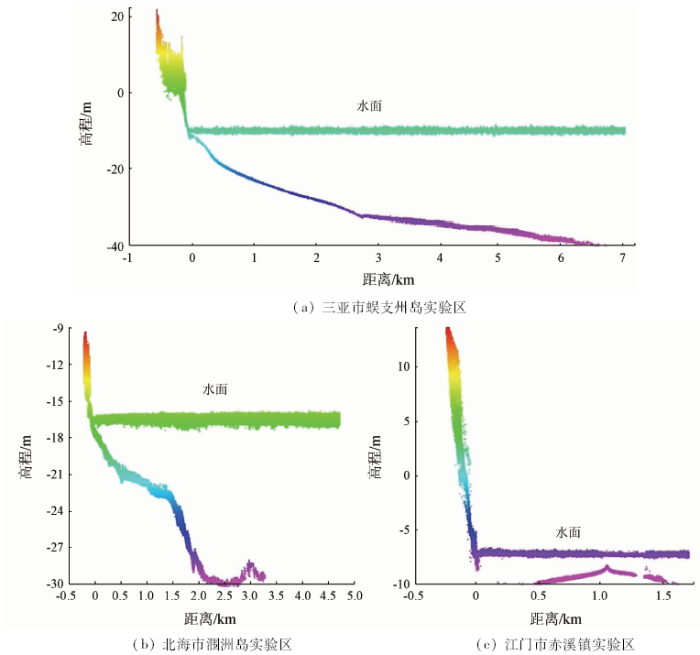
选取3个实验区垂直海岸线方向的高程剖面分别如图7所示。可估算,三亚市蜈支州岛实验区最大测深30 m,水底回波信息连续。北海市涠洲岛实验区最大测深达到14 m,水底回波信息连续。江门市赤溪镇实验区的最大测深为3 m,可测区域范围小,且存在不可探底的空白区域。从蜈支州岛到涠洲岛到赤溪镇,由以一类为主过渡到以四类为主,与CZMIL Nova的实际最大测深逐步递减相符。赤溪镇测深潜力以四类为主,近岸区域也存在离散的二类、三类区域,依据推测测量结果中存在大面积空白但也有部分可测区域,实测结果与其相符合。有效证实了测深潜力分类结果是基本可靠的。
图7
4 结论
基于目前最先进的机载激光雷达系统之一CZMIL Nova,对中国海岸带机载激光雷达测深潜力进行分析计算,得到了机载激光雷达在中国海岸带作业潜力分类情况,可用于指导机载激光雷达水深测量工作的整体布局。圈定了适合机载激光雷达水深测量开展海陆一体地形测绘的近海区域,即海南岛文昌—东方段、北海及雷州半岛东西岸、山东半岛日照—青岛段、辽东湾银州—绥中段。
机载激光雷达水深测量系统能否开展工作取决于测区水体浑浊度,因此在作业前应当根据系统测深参数,基于Kd数据和水深数据(通过海图等途径获取)进行模拟计算,圈定潜在可作业区域,减少无效作业。
由于台湾省东海岸较陡峭,测深范围较小,本文使用的数据空间分辨率较低,因而未能对台湾沿岸进行分析。受制于数据精度、数据空间分辨率,因此本文得出的理论测深潜力分类结果在局部小范围区域可能与实际情况有差异。
参考文献
海岸带环境承载力评价方法研究
[J].
The assessment method of coastal environmental carrying capacity
[J].
基于相关特性的水下连续激光后向散射测量方法研究
[D].
Research on Underwater Continuous Laser Backscattering Measurement Method Based on Correlation Characteristics
[D].
Meeting the international hydrographic organization requirements for bottom feature detection using the coastal zone mapping and imaging LiDAR (CZMIL)
[C]//
机载激光雷达系统及其在海洋调查中的应用前景
[J].
Airborne LiDAR and its application prospects in marine surveys
[J].
机载激光雷达海洋探测的模拟研究
[J].
Simulation research on airborne LiDAR bathymetry system
[J].
运用MODIS遥感数据评测南海北部区域机载激光雷达测深系统参数
[J].
Evaluation of airborne LiDAR bathymetric parameters on the northern South China Sea based on MODIS data
[J].
黄海、东海区域漫衰减系数光谱遥感反演及激光测深性能评估
[J].
Inversion of diffuse attenuation coefficient spectral in the Yellow Sea/East China Sea and evaluation of laser bathymetric performance
[J].
海南岛沿岸海域水体漫衰减系数光谱分析及LiDAR测深能力估算
[J].
Analysis of diffuse attenuation coefficient spectra of coastal waters of Hainan Island and performance estimation of airborne LiDAR bathymetry
[J].
Airborne LiDAR bathymetry
[J].
The history of laser bathymetry
[M]//
Early results of simultaneous terrain and shallow water bathymetry mapping using a single-wavelength airborne LiDAR sensor
[J].
机载激光雷达测深技术与应用研究进展
[J].
Development of airborne laser bathymetric technology and applications
[J].
CZMIL(coastal zone mapping and imaging LiDAR):From first flights to first mission through system validation
[C]//
Prelude to CZMIL:Seafloor imaging and classification results achieved with CHARTS and the rapid environmental assessment (REA) processor
[J].
CZMIL as a rapid environmental disaster response tool
[C]//
Introduction to ocean optics
[C]//
Spectral dependence of the diffuse attenuation coefficient of light in ocean waters
[C]//
MODIS-Aqua漫射衰减产品Kd(490)在南海海域的精度对比
[J].
Comparison of diffuse attenuation coefficient of downwelling irradiance products derived from MODIS-Aqua in the South China Sea
[J].
An improved in-situ bio-optical data set for ocean color algorithm development and satellite data product validation
[J].

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}