

0 引言
遥感影像配准是一个空间映射的过程,即通过某种空间变换使得2幅影像中同一目标点达到空间位置一致。遥感影像配准技术在影像自动处理领域得到广泛应用,是目前遥感研究应用的热点问题之一,学者们先后提出了多种配准算法[1]。影像配准算法大致可分为基于灰度信息和基于特征2种配准算法。其中,基于特征的影像配准算法以计算量小、速度快、鲁棒性强的特点被广泛的应用。
在基于特征的影像配准算法中最具代表性的是Lowe提出的尺度不变特征变换算法(scale-invariant feature transform,SIFT)[2,3],因具有优秀的仿射不变性和鲁棒性[4]在影像配准领域得到了广泛的认可。在此基础上,李晓明等首次将SIFT算法应用在遥感影像的自动配准中,但是传统SIFT算法进行遥感影像配准过程中的效果并不理想。为此,李晓明等[5]引入了随机抽样一致(random sample consensus,RANSAC)算法[6],较为有效地剔除了误匹配点对并提高了匹配精度。然而,由于遥感影像的不确定性,SIFT与RANSAC算法结合进行遥感影像匹配过程中仍存在大量的误匹配点对,达不到实际应用的匹配效果。
针对此问题,程焱等[7]提出使用M估计代替RANSAC算法提高遥感影像自动配准精度的建议。但由于在遥感影像的匹配过程中误匹配点对较多,使用传统的统计学方法剔除误匹配点对仍较为困难。因此,学者们针对这一问题提出了一系列改进算法,如李芳芳等[8]对SIFT算法匹配精度进行了优化,采用双向匹配算法并结合匹配点对坐标差进行误匹配点对的剔除,该方法很大程度上提高了匹配点对的精确度; 程红等[9]提出了利用象限和角度剔除SIFT特征匹配的误匹配点对的思路,也在一定程度上解决了误匹配的问题; 张谦等[10,11]在多源影像配准过程中提出了使用透视变换方程耦合均方根误差作为误差模型剔除误匹配的方法; 沈宇臻等[12]在多源影像匹配时提出了通过计算特征点对之间距离、方向夹角的关系等进行误匹配点对剔除的思路,但是该方法需要首先设定距离阈值和方向阈值。
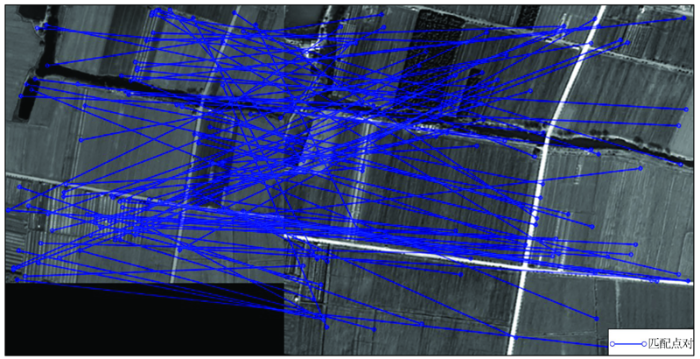
综上所述,在实际配准过程中,由于存在纹理相似、图像噪声等遥感影像不确定性因素的影响,在2幅图像上检测出的特征点存在较大差异,从而使得一些非同名特征点也被错误地匹配成为配准点对。为了进一步提高影像配准的精度,在影像进行SIFT算法特征点的提取和匹配之后,还需进一步剔除误匹配点对,提高配准点对的数量和精度。为此,本文提出使用格网索引对SIFT算法进行优化,剔除大量的误匹配点对之后再使用RANSAC算法,其显著提高了SIFT算法在遥感影像配准中的精度,并且使用该算法进行影像配准得到了较好的结果。
1 SIFT算法
SIFT算法利用高斯差分金字塔构建多尺度空间,寻找多尺度空间的稳点特征和描述。SIFT算法的核心思路可分为4步[3]:
1)尺度空间极值检测。基于多尺度空间理论通过高斯差分代替拉普拉斯差分建立多层高斯差分金字塔,在差分金字塔中寻找极值检测点。
2)关键点定位。比较检测点所在图像的3×3邻域8个像素点,以及其相邻的上下2层的3×3邻域18个像素点共26个像素点,是否为极值点。通过曲线拟合寻找尺度空间的极值点的位置,再去除低对比度的关键点和不稳定的边缘响应点,得到稳定性强的关键点。
3)关键点主方向分配。利用关键点邻域像素的梯度分布特性来确定其方向参数,再利用图像的梯度直方图求取关键点局部结构的稳定方向。
4)关键点描述子构造。以关键点为中心取16×16的窗口,并均分为4×4个子区域,计算每个子区域8个方向的梯度方向直方图,这样每个关键点都可以产生4×4×128维的特征向量。
图1

图2
2 基于格网优化的SIFT影像配准
鉴于SIFT算法存在的不足,在大量实验分析的基础上,发现引入格网索引能够有效提高匹配精度。格网索引是一种常见的空间索引,其原理是将一定地理范围划分成M行N列,得到M×N个格网[13]。为了建立起地理区域与格网索引的对应关系,存储了每个空间对象落在格网区域内的索引信息,并对每个格网赋予唯一的索引值。具体步骤为: 首先,通过SIFT算法匹配得到待配准影像在基准影像中的对应区域; 然后,建立相对应的格网,如图3所示; 最后,根据空间对象的地理坐标计算出空间对象属于的格网,再将其索引信息存储到该点内。本文将SIFT算法检测出的特征点建立格网索引(格网大小为5×5),通过索引值将SIFT算法匹配得到的特征点对进行剔除,保留索引值相同的特征点对。
图3

图3
遥感影像提取特征点后建立格网索引
Fig.3
Remote sensing image extraction feature points to establish grid index
在进一步的实验研究中发现,将RANSAC算法与格网索引进行耦合,能够进一步提高匹配精度。RANSAC算法从包含较多噪声点或无效点的数据集中,通过反复选择数据中的随机子集建立模型,符合该模型的数据称为“内点”,不符合的称为“外点”,最后通过“内点”和模型的错误率选择最优模型,确定出有效样本。该算法对图像噪声有很好的鲁棒性,因此在消除误匹配点,提高配准精度方面已有广泛的应用。使用RANSAC算法对SIFT匹配结果进行优化,能够一定程度上提高匹配的精确度。但是由于遥感影像会存在近似的纹理特征,导致误匹配点对较多,并且由于误匹配点对数量增多,造成RANSAC算法“外点”增多,会导致RANSAC无法准确区分“内点”与“外点”,影响RANSAC算法优化SIFT匹配的结果。
在上述多个理论的基础上,提出了基于格网索引优化的遥感影像自动配准算法,流程如图4所示。
图4
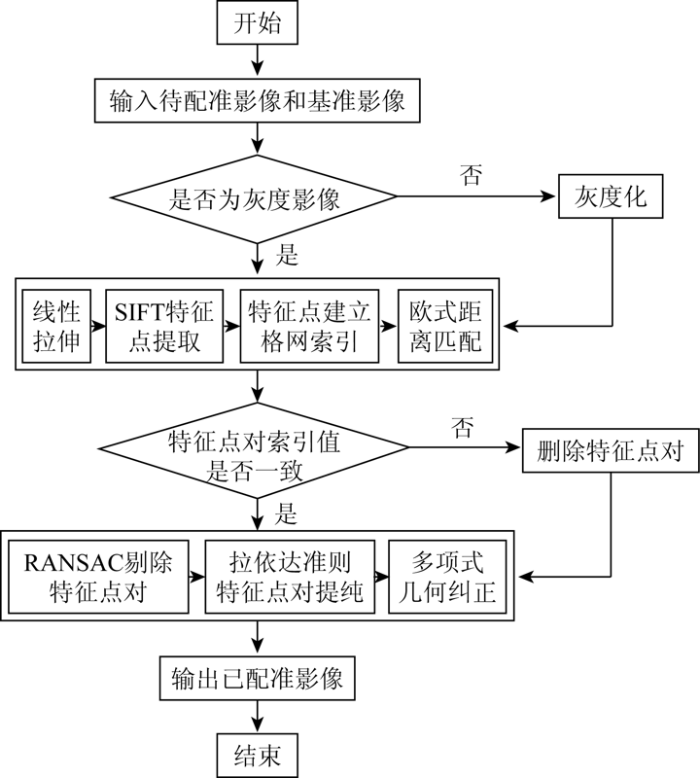
图4
基于格网索引优化的遥感影像配准流程
Fig.4
Flow chart of remote sensing image registration based on grid index
3 实验与分析
表1 实验数据的详细信息
Tab.1
| 编号 | 待配准影像 | 基准影像 | 影像特点 | ||||
|---|---|---|---|---|---|---|---|
| 卫星传感器 | 空间分 辨率/m | 大小/像素 | 卫星传感器 | 空间分 辨率/m | 大小/像素 | ||
| 1 | GF-1 PMS全色 | 2 | 1 213×866 | GF-1 PMS融合 | 2 | 1 640×1 247 | 地形平坦 |
| 2 | GF-1 PMS全色 | 2 | 1 854×1 660 | GF-1 PMS融合 | 2 | 2 437×2 103 | 地形起伏较大 |
| 3 | GF-2 PMS多光谱 | 4 | 1 077×1 025 | GF-1 PMS融合 | 2 | 2 916×2 755 | 分辨率差异大、拍摄卫星不同 |
图5
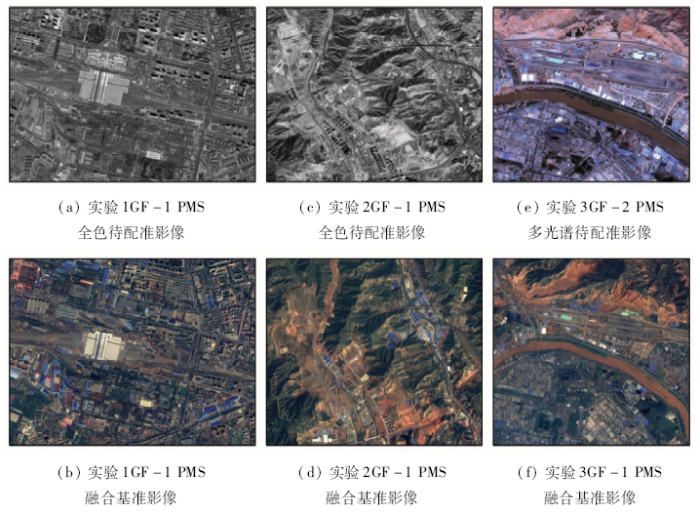
表2 4种算法配准点对数量和正确率对比
Tab.2
| 编号 | SIFT | SIFT+RANSAC | 分块SIFT | 本文算法 | ||||
|---|---|---|---|---|---|---|---|---|
| 数量/个 | 正确率/% | 数量/个 | 正确率/% | 数量/个 | 正确率/% | 数量/个 | 正确率/% | |
| 1 | 302 | 66.23 | 242 | 82.64 | 1 234 | 65.64 | 824 | 98.30 |
| 2 | 543 | 73.66 | 445 | 89.89 | 2 337 | 60.98 | 1 457 | 97.80 |
| 3 | 117 | 42.74 | 71 | 70.42 | 378 | 34.92 | 141 | 93.62 |
图6
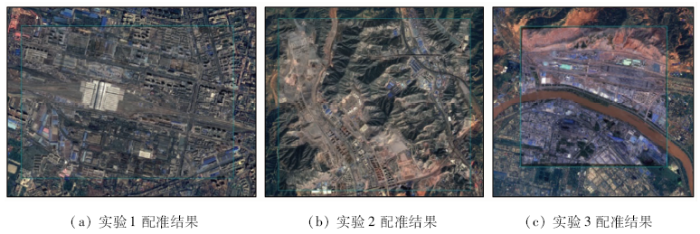
为了定量分析本文算法的配准精度,从第一组实验的基准影像和配准影像中选取10对同名像点作为检查点如表3所示,计算得到坐标的均方根误差为2.560 24,即0.695 69个像素。其中2幅影像均为WGS84坐标系,投影系为UTM投影。
表3 配准精度评价
Tab.3
| 点号 | 配准结果 | 参考影像 | 误差 | ||
|---|---|---|---|---|---|
| X坐标 | Y坐标 | X坐标 | Y坐标 | ||
| 1 | 388 878.864 2 | 3 991 408.902 2 | 388 877.898 1 | 3 991 409.868 6 | 1.867 278 171 |
| 2 | 387 901.443 2 | 3 991 468.957 5 | 387 902.409 5 | 3 991 469.440 7 | 1.167 217 930 |
| 3 | 387 173.594 8 | 3 991 709.204 0 | 387 172.990 8 | 3 991 710.411 9 | 1.823 838 411 |
| 4 | 386 640.921 4 | 3 991 768.720 2 | 386 639.471 9 | 3 991 768.237 0 | 2.334 532 490 |
| 5 | 388 840.743 0 | 3 992 224.246 2 | 388 842.675 8 | 3 992 223.279 9 | 4.669 451 530 |
| 6 | 387 287.925 7 | 3 992 392.608 9 | 387 289.375 3 | 3 992 394.058 5 | 4.202 680 320 |
| 7 | 386 452.627 8 | 3 992 431.072 6 | 386 453.594 1 | 3 992 432.662 3 | 3.460 881 780 |
| 8 | 388 841.030 2 | 3 992 224.250 7 | 388 841.803 1 | 3 992 223.477 6 | 1.195 058 021 |
| 9 | 388 269.212 1 | 3 992 859.006 4 | 388 268.796 8 | 3 992 860.314 0 | 1.882 291 850 |
| 10 | 387 464.323 5 | 3 991 903.360 7 | 387 464.323 5 | 3 991 905.092 5 | 2.999 131 239 |
4 结论
1)本文针对SIFT算法在遥感图像配准中出现的大量误匹配现象,提出了基于格网索引的遥感影像自动配准算法,引入格网索引剔除了SIFT算法的大量误匹配点对,从而减少了RANSAC算法中的“外点”,提升了RANSAC算法的效果。利用本文优化的SIFT算法可以同时提高遥感影像配准点对的正确率和配准点对数量。实验表明,该算法相对于原有传统的分块SIFT算法显著提升了遥感影像配准的精度,结果更加理想。
2)本文算法部分过程计算量较大,效率较低,并且本文算法配准的精度跟检测到配准点对数量的多少有关,在遥感影像存在辐射差异的情况下配准效果较差,下一步将对此问题进行深入研究,以提升遥感影像配准的普适性。
参考文献
基于SIFT的遥感图像配准技术综述
[J].
Summarization of SIFT-based remote sensing image registration techniques
[J].
Object recognition from local scale-invariant features
[C]//
Distinctive image features from scale-invariant keypoints
[J].
DOI:10.1023/B:VISI.0000029664.99615.94
URL
[本文引用: 2]

This paper presents a method for extracting distinctive invariant features from images that can be used to perform reliable matching between different views of an object or scene. The features are invariant to image scale and rotation, and are shown to provide robust matching across a substantial range of affine distortion, change in 3D viewpoint, addition of noise, and change in illumination. The features are highly distinctive, in the sense that a single feature can be correctly matched with high probability against a large database of features from many images. This paper also describes an approach to using these features for object recognition. The recognition proceeds by matching individual features to a database of features from known objects using a fast nearest-neighbor algorithm, followed by a Hough transform to identify clusters belonging to a single object, and finally performing verification through least-squares solution for consistent pose parameters. This approach to recognition can robustly identify objects among clutter and occlusion while achieving near real-time performance.]]>
A performance evaluation of local descriptors
[J].DOI:10.1109/TPAMI.2005.188 URL [本文引用: 1]
基于SIFT特征的遥感影像自动配准
[J].
SIFT based automatic registration of remotely-sensed imagery
[J].
DOI:10.3390/rs10060885
URL
PMID:29938116
[本文引用: 1]
Multiple satellite-based earth observations and traditional station data along with the Soil & Water Assessment Tool (SWAT) hydrologic model were employed to enhance the Lower Mekong River Basin region's hydrological decision support system. A nearest neighbor approximation methodology was introduced to fill the Integrated Multi-satellite Retrieval for the Global Precipitation Measurement mission (IMERG) grid points from 2001 to 2014, together with the Tropical Rainfall Measurement Mission (TRMM) data points for continuous precipitation forcing for our hydrological decision support system. A software tool to access and format satellite-based earth observation systems of precipitation and minimum and maximum air temperatures was developed and is presented. Our results suggest that the model-simulated streamflow utilizing TRMM and IMERG forcing data was able to capture the variability of the observed streamflow patterns in the Lower Mekong better than model-simulated streamflow with in-situ precipitation station data. We also present satellite-based and in-situ precipitation adjustment maps that can serve to correct precipitation data for the Lower Mekong region for use in other applications. The inconsistency, scarcity, poor spatial representation, difficult access and incompleteness of the available in-situ precipitation data for the Mekong region make it imperative to adopt satellite-based earth observations to pursue hydrologic modeling.
Random sample consensus:A paradigm for model fitting with applications to image analysis and automated cartography
[J].DOI:10.1145/358669.358692 URL [本文引用: 1]
基于SIFT特征遥感影像自动配准与拼接
[J].将SIFT特征用于遥感及航拍影像的配准和拼接,并针对RANSAC算法在SIFT特征匹配中效率低、同时还需要估计内点噪声均方差作为误差数据的门限等不足,采用一种基于投影的M估计算法,利用最优化准则和输入数据的内在联系绕开鲁棒估计对噪声均方差的依赖性。实验结果表明,对航空和航天遥感影像SIFT特征在一定程度的视点变化、光照变化、分辨率不同等情形下,该方法具有稳定、快速、可靠等特点。M估计则有效地解决了对于不同输入数据的门限选择,真正实现了无人工干预的自动配准。
Automatic registration and mosaic of remote sensed imagery based on SIFT feature
[J].In this paper,SIFT feature is introduced into automatic registration and mosaic of remote sensed imagery and aerial imagery.Considering to the low efficiency of RANSAC algorithm and the estimation of the scale of inliers noise which refer to ,we presents a feature matching approach called projected based M-estimator to resolve the matching problem,which can escape from human-interaction in automatic system.Numerous experiments have been conducted for both aerial and satellite imageries under various conditions such as geometric distortion,illumination variation and different resolution.The result showed that our matching approach performs well and is stable,reliable,efficient and automatic.The M-estimate can achieve authentically automatic registration without human-interaction in despite of different input data with different scale of inliers noise.
SIFT算法优化及其用于遥感影像自动配准
[J].
Improved SIFT algorithm and its application in automatic registration of remotely-sensed imagery
[J].Optimized traditional SIFT algorithm from feature point extracting time and matching accuracy.Registration control points extracted from this algorithm are used to construct TIN for tiny facet primitive rectifying.Experiment results show that the method is an effective automatic registration method for remotely-sensed imagery.
基于SIFT算法的图像匹配剔点方法研究
[J].
A method to reject points based on SIFT for image matching
[J].
多源遥感影像配准中的SIFT特征匹配改进
[J].
An improved SIFT algorithm for multi-source remote sensing image registration
[J].
一种带几何约束的大幅面遥感影像自动快速配准方法
[J].
A rapid image registration method based on restricted geometry constraints for large-size remote sensing image
[J].
一种基于邻域投票的异源光学影像SIFT匹配误差剔除方法
[J].
A method of SIFT matching error elimination for heterogeneous optical images based on neighborhood voting
[J].

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}