

0 引言
河湖水环境监测是人类一直以来高度重视的环境问题。相对于传统监测手段,遥感技术具有快速、大面积同步观测、周期性等特点,对于获取长期、大范围河湖水环境的时空变化具有显著优势[1]。国内外许多学者通过遥感反演水体中的水质参数实现对内陆河流、湖泊以及海岸带等复杂水域的动态监测[2,3]。水体中物质组成及浓度变化往往会引起水体颜色的变化[4],遥感技术可以通过感知水体的光谱特征计算水体颜色参量[5]。根据国际照明委员会(CIE)发布的CIE-XYZ颜色的量化标准[6],Wernand 等发展了Envisat/MERIS、Aqua/MODIS、SeaWiFs和Sentinel-3/OLCI这4种海洋水色传感器的色度坐标计算方法,建立了Forel-Ule(FUI)水色指数色度坐标查找表,实现了利用多光谱水色卫星数据量化水体颜色[5,7,8]。在此基础上,Wang等利用Aqua/MODIS数据计算得到的FUI对太湖以及全球其他大型湖泊进行了水体分类和营养状态评价[9,10]。Zhao等通过设定Hue angle阈值的方法对内陆复杂水体进行了分类[11]。也有学者通过加权调和平均的方法计算水体的表观波长(apparent visible wavelength,AVW)来监测22 a来全球海洋水体的水色变化[12]。该方法适用于不同类型的多光谱和高光谱数据,并且证明了高光谱数据在水体颜色参量精确计算方面的优势。
1 研究区概况及数据源
1.1 研究区概况
图1
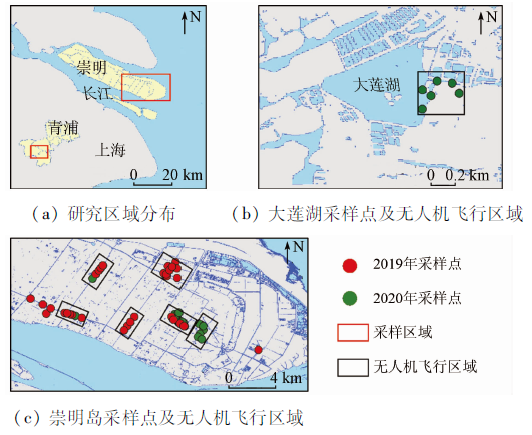
1.2 实测数据
2019—2020年间笔者进行了8次野外数据采集工作(2019年4月、5月、9月上旬、9月下旬、11月; 2020年1月、5月、6月),采集了110个河湖采样点的实测光谱数据和水样数据,剔除异常数据后得到有效数据94组。上海市青浦区大莲湖有8个采样点,崇明区河道有86个采样点,其中无人机高光谱数据覆盖采样点(包含同步测量和一小时间隔内测量)35个。使用ASD-FieldSpec HandHeld 2地物光谱仪根据水面以上测量方法[18],测量并计算得到采样点水体的遥感反射率数据。使用HACH 2100Q便携式浊度计现场测量浊度。根据《地表水和污水监测技术规范》[19]采集和保存水样,带回实验室采用分光光度法测量叶绿素a浓度(Chl-a)[20]、有色溶解有机物吸收系数(CDOM)[21]、总氮(TN)[22]和总磷(TP)[23],对于内陆水体选择440 nm处的吸收系数ag(440)作为CDOM的代表。采用称重法[24]测量水体总悬浮物浓度(TSM),实测采样点各类水质参数浓度分布如表1所示。
表1 采样点水质参数浓度分布
Tab.1
| 水质参数 | 最小值 | 最大值 | 平均值 | 标准差 |
|---|---|---|---|---|
| Chl-a/(mg·m-3) | 4.62 | 311.63 | 41.98 | 54.15 |
| TSM/(mg·L-1) | 4.50 | 281.67 | 45.71 | 42.26 |
| CDOM/m | 0.30 | 2.22 | 0.88 | 0.46 |
| 浊度/NTU | 5.95 | 142.00 | 51.17 | 30.23 |
| TN/(mg·L-1) | 0.44 | 2.53 | 1.34 | 0.53 |
| TP/(mg·L-1) | 0.009 | 0.93 | 0.15 | 0.18 |
1.3 无人机高光谱数据
本研究的无人机平台为多旋翼无人机KWT-X6L,搭载了Micro Hyperspec VNIR A-Series高光谱成像仪(HeadWall Photonics Inc.),其光谱范围为400~1 000 nm,具有325个光谱通道,光谱分辨率1.8 nm。于2019年5月、9月、11月以及2020年5月在崇明岛河道进行了无人机飞行,共获取了11条崇明区重点关注河道的无人机高光谱数据。根据高光谱影像质量选择400~800 nm范围的218个光谱波段。无人机按照预先设置好的航线飞行,飞行高度100 m,地面幅宽92 m,空间分辨率0.09 m,飞行前根据光照强度设置高光谱传感器的积分时间,飞行速度根据积分时间换算得到,探测器参数设置好以后利用镜头盖遮光测量一段暗电流数据。无人机飞行时间均在9: 00—11: 00和13: 00—15: 00之间进行。
2 高光谱数据处理
2.1 遥感反射率测定
式中: 辐亮度单位为Wm-2nm-1sr-1; 遥感反射率单位为sr-1; λ为光谱波长,nm。
通过均方根误差(RMSE)、平均无偏绝对百分比误差(ε)及皮尔森相关系数(R) [27]评估遥感反射率精度,公式分别为:
式中: u为无人机计算得到的遥感反射率; f为实测遥感反射率; n为验证点的个数。
2.2 数据几何校正及降噪处理
无人机飞行及高光谱成像数据采集过程中,同步获得了影像的地理位置、姿态信息,通过数据处理软件进行了高精度几何校正。采用城市地表水高光谱抗阴影水体指数方法[29]提取河湖水体。
图2

图2
无人机高光谱影像降噪流程及噪声评估
Fig.2
Noise reduction process and evaluation of UAV hyperspectral image
3 研究方法
3.1 水体颜色参量计算
CIE-XYZ颜色系统根据人眼的波长识别范围(380~780 nm)计算Hue angle,忽略了反映生物化学变化极其重要的紫外和近红外波段,而一些常见的内陆水体类型(高浊度、高CDOM以及藻类爆发水域)在蓝紫光、近红外波段的光谱特征非常重要。因此,除了采用Hue angle量化颜色,还采用给定光谱的主导波长来表示[12]。AVW因为包含了紫外和近红外波段,对于颜色更蓝或更红的极端水域,相对Hue angle具有更高的变化范围。故为了充分利用所获得的高光谱信息来准确量化内陆水体水色,本研究从水色主导波长的角度利用无人机高光谱全波段数据(400~800 nm)计算AVW,计算公式为:
式中: Rrs为水体遥感反射率,sr-1; λ为光谱波长,nm; n为高光谱波段数。
3.2 水体色相分类
实地调查发现,采样区域水环境恶化主要表现为大量浮萍漂浮的绿色水体和污染源附近的黄棕色污染水体。根据Hue angle定量化水体颜色变化这一特点,参考设定Hue angle阈值对内陆河湖水体的分类方法[11]。从实测数据中选出19条不同类型水体(5条浮萍漂浮的绿色水体、7条一般水体和7条污染源附近黄棕色水体)的高光谱反射率曲线计算Hue angle。浮萍漂浮的水体呈绿色,具有植物光谱特征。污染源附近黄棕色水体主要组分为非色素颗粒物或有色溶解有机物,有色溶解有机物中含有的腐殖酸和富里酸随着浓度的升高会使水体呈现黄褐色。根据所选不同水体的Hue angle值将水体分为绿色异常水体(Hue angle≤218°)、一般水体(218°≤Hue angle≤225°)、黄棕色异常水体共3类(Hue angle≥225°)(图3)。
图3
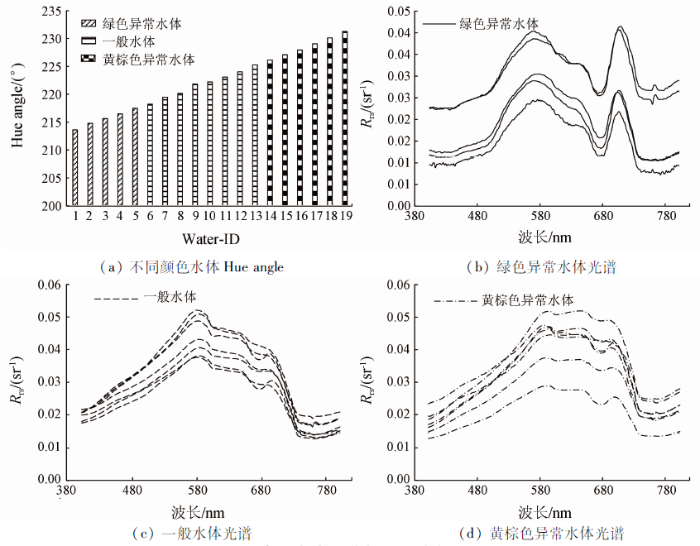
图3
不同类型水体光谱曲线及对应Hue angle
Fig.3
Spectral curves and corresponding Hue angle of different types of water
3.3 水质参数高光谱遥感反演
通过对同步实测的遥感反射率与水质参数(Chl-a,TSM,CDOM,浊度,TN,TP)进行统计分析,将不同水质参数选择相关性最高的波段或波段组合作为自变量,通过指数、幂函数、线性、多项式、偏最小二乘回归等方法构建反演模型(表2),通过R2和RMSE对模型的反演效果进行评估。
表2 水质参数反演模型
Tab.2
| 水质 参数(y) | 自变量(x) | 反演模型 |
|---|---|---|
| Chl-a/ (mg·m-3) | x=Rrs(636.91)/ Rrs(701.64) | y=38.27x-6.10 |
| TSM/(mg·L-1) | x=Rrs(733) | y=251 886x2-7 300.8x+74.94 |
| CDOM/m | x1=Rrs(600)/Rrs(709), x2=Rrs(652)/Rrs(725) | y=2.098x1+0.286x2+2.950 |
| 浊度/ NTU | x=(Rrs(651)- Rrs(655))/Rrs(761) | y=140.58exp(18x) |
| TN/ (mg·L-1) | x=(Rrs(482)- Rrs(677))/(Rrs(482)+Rrs(677)) | y=751.27x3+201.79x2+3.60x+0.72 |
| TP/ (mg·L-1) | x=(Rrs(618)- Rrs(692))/(Rrs(618)+Rrs(692)) | y=7 084.4x3-1 177.7x2+55.84x-0.48 |
参考综合营养指数(TLI)计算方法[35],基于Chl-a、TN、TP浓度估算河湖水体的TLI指数。通过水体的TLI指数,将水体营养状态分为贫营养(TLI<30)、中营养(30≤TLI≤50)、轻度富营养(50<TLI≤60)、中度富营养(60<TLI≤70)、重度富营养(70<TLI)5种状态。
4 结果与讨论
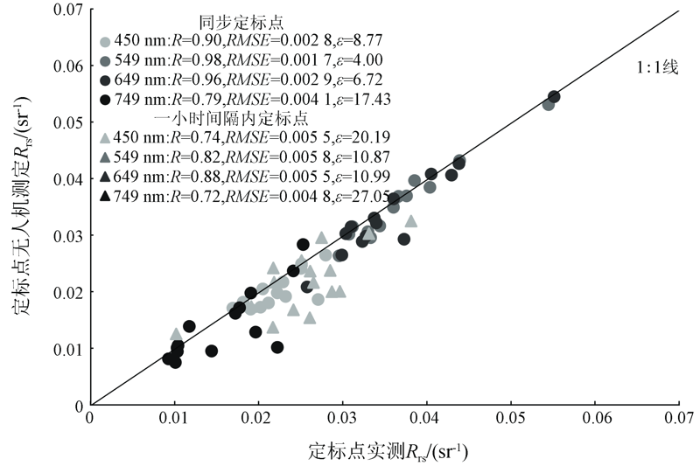
4.1 无人机-实测遥感反射率验证
通过公式(3)—(5)利用同步定标点和一小时间隔内定标点的遥感反射率数据对无人机遥感反射率测定精度进行评价,选择450 nm,549 nm,649 nm和749 nm这4个波段的不同定标点对比结果进行展示(图4)。遥感反射率整体测定误差表明: 无人机高光谱计算的遥感反射率,各波段ε在7.7%~27.9%之间(平均值13.34%),RMSE为0.0034 sr-1~0.0062 sr-1之间(平均值0.0046 sr-1),R在0.63~0.93之间(平均值0.83),整体误差较低。由于该定标方法没有准确去除光照强度变化对遥感反射率计算的影响,因此一小时间隔内定标点的测定精度略低于同步定标精度(图4)。考虑到大多数无人机由于载重局限,仅搭载一个向下探测的传感器,在光照条件较为稳定均匀的情况下,利用该测定方法获得的遥感反射率精度较高,可以推广应用。
图4
4.2 水体颜色参量与水质参数反演效果评估
根据Hue angle [8]和AVW计算方法(式(6)),反演无人机覆盖35个采样点的现场观测高光谱水体颜色参量,与无人机高光谱反演结果对比(图5(a)): 无人机高光谱反演的水体颜色参量基本与原位观测高光谱反演值一致(Hue angle: R2=0.97,RMSE=0.86°; AVW: R2=0.93,RMSE=2.01 nm)。相对于多光谱数据反演的水体颜色参量需要通过实测高光谱校正[8],无人机高光谱数据反演的水体颜色参量更加准确且避免了校正带来的误差。根据相关分析构建的各类水质参数反演模型(图5(b)),从与实测数据的对比结果来看具有较高的反演精度(Chl-a: R2=0.83,RMSE=20.61 mg/m3; TSM: R2=0.82,RMSE=16.16 mg/L; CDOM: R2=0.79,RMSE=0.22 m-1; 浊度: R2=0.74,RMSE=15.06 NTU; TN: R2=0.69,RMSE=0.25 mg/L; TP: R2=0.82,RMSE=0.13 mg/L)。
图5
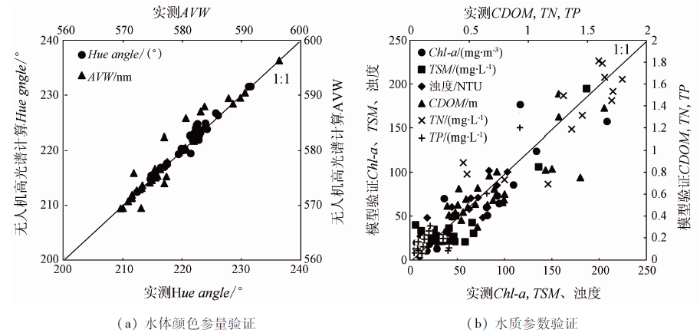
图5
无人机高光谱反演水体颜色参量、水质参数精度验证
Fig.5
Verification of accuracy of UAV hyperspectral inversion of water colour parameters and water quality parameters
4.3 河段水体色相分类
利用25条绿色异常水体、33条一般水体和17条黄棕色异常水体的原位观测高光谱数据对Hue angle水体分类方法进行验证,验证精度分别为68%,91%和82%,证明该方法具有较高的分类精度。
根据Hue angle阈值对2019—2020年崇明岛重点河湖水体进行分类。图6(a)显示,2019年11月份的南横引河河段整体都为黄棕色异常水体,结合实际采样调查分析,南横引河作为崇明岛重要的航运河道,船只航行直接造成水体浊度增高,且该河段临近崇明岛外围港口,长期停靠在河道两侧的船只产生的生活污水也会对水体颜色造成影响。同一时间段的七效港河(图6(b))大部分为一般水体,城镇居民生活区一侧的河道有明显的黄棕色异常。2020年5月份崇明岛的河湖水体颜色相对2019年11月份有明显变化,七效港河的黄棕色异常水体面积有明显的减小(图6(d))。南横引河整体的黄棕色异常现象消失转为一般水体,但临近夏季丰水期,开始出现绿色异常水体(图6(c))。
图6
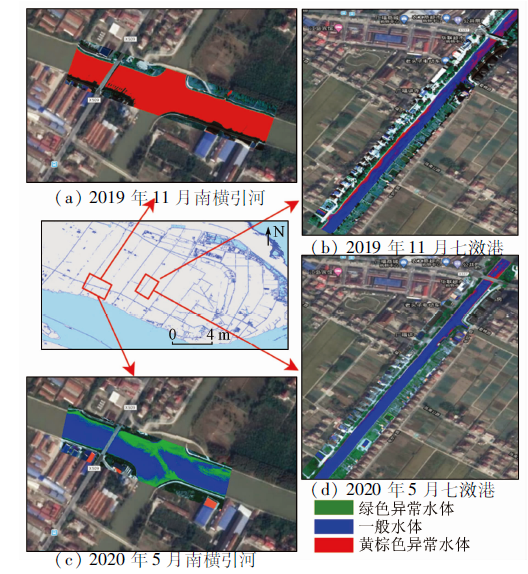
图6
上海市崇明岛河湖水体Hue angle分类
Fig.6
Hue angle classification of rivers and lakes in Chongming Island, Shanghai
通过分析2019年11月和2020年5月崇明岛重点河段Hue angle分类结果,发现崇明岛河湖在枯水期有较多的黄棕色异常水色现象。产生该现象的原因可能与崇明“闸控型”水系有关,在非引排期且雨水量不太充沛的时候,河流之间近乎封闭,导致水动力严重不足,再加上企业、居民生活废水的排放,使得河湖水体颜色出现明显异常。另外南横引河作为主要航运河道,在11月和5月的水体颜色变化明显,怀疑该河道受人为因素影响较为严重,需加强监管和治理。
4.4 多参数水环境分析
图7为上海市崇明岛重点观察河道疑似污染水体识别。图7(a)—(i)显示了崇明岛北港东岸转河,水体颜色参量和水质参数基于无人机高光谱数据定量反演的结果,图7(j)显示北港东岸转河左右两侧为黄棕色异常水体。各类水质参数浓度都较高,其中图7(d)—(e)显示TN,TP浓度达到Ⅳ类水体的标准[36](1≤TN≤1.5 mg/L,0.2≤TP≤0.3 mg/L)。TLI指数(图7(i))表明该区域的黄棕色异常水体为轻度富营养化水体。河道中间的绿色异常水体TLI指数也显示为轻度富营养化,部分水质参数(Chl-a,TSM,CDOM,TP)显示高浓度特点(图7(a)—(c),7(e)),但该区域的浊度、TN(图7(h),7(e))相对黄棕色异常水体较低,分析原因在于该异常区域水流相对缓慢,泥沙等非色素颗粒物沉淀,水体透光性较好,浊度较低,浮游植物光合作用增强,再加上附近多处沟渠和隐蔽排污口不定期排放高营养盐(TP主导)污染物导致出现藻华现象。而河道两侧的异常水域现场调查时正在排放污水,排污过程导致水体浊度升高,水中非色素颗粒物增多,水体呈黄棕色。
图7
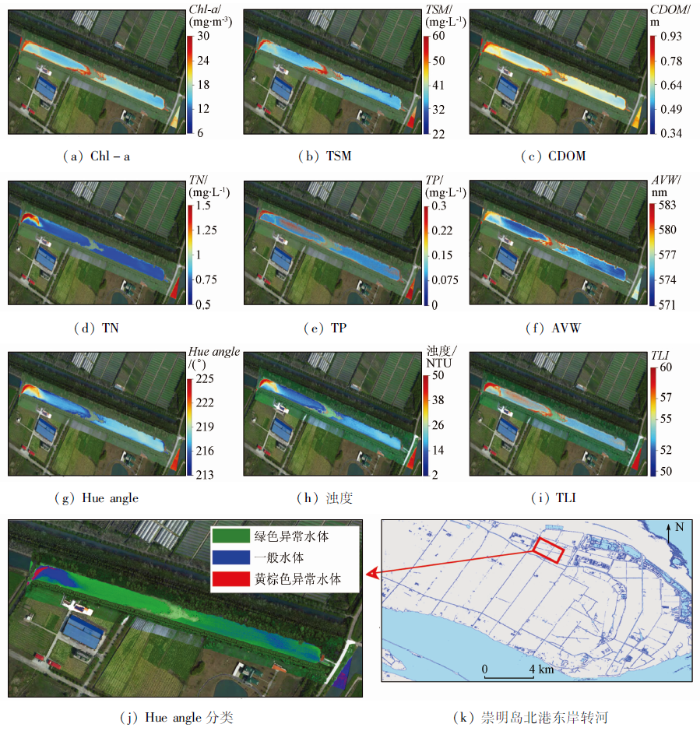
图7
上海市崇明岛重点观察河道疑似污染水体识别
Fig.7
Identification of suspected polluted water in the key observational rivers of Chongming Island in Shanghai
结果显示Hue angle和AVW均能够有效地对异常颜色水体进行甄别,此外,Hue angle分类可以有效地划分不同的水体颜色类型,用于判别异常水体的空间位置和水色异常类型,从而丰富了水环境遥感探测信息。结合水质参数定量反演,也有助于对疑似污染水体进一步分析,对于突发性河湖水体污染的快速监测提供了一定辅助支持,同时为现场观测提供了有效信息。
5 结论
本研究发展了一种无人机高光谱遥感反射率标定方法,通过该方法计算的高光谱遥感反射率各波段平均ε为13.34%,RMSE平均为0.004 6sr-1,R平均为0.83。可以在光照稳定的情况下计算较为准确的水体遥感反射率。后续仍需研究如何去除光照变化计算遥感反射率。
通过FFT和MNF方法对高光谱数据的条带噪声和光谱维噪声进行了去除,高光谱整体信噪比提升了128%,有效提高了数据质量。
利用高光谱数据反演水体Hue angle,AVW和水质参数,有效利用了高光谱数据丰富的光谱信息。根据Hue angle能够区分不同颜色水体的特点,通过设定Hue angle阈值的方法对水体进行分类,应用该分类方法对上海市崇明岛河湖水体颜色的时空变化进行分析。同时利用水体颜色参量以及水质参数反演结果对上海市崇明岛的重点观察河段进行疑似污染水体的识别。以上结果表明高光谱数据在水体颜色和水质参数反演应用方面的潜力,结合无人机高时效性、高空间覆盖度的特点,对于辅助河湖水环境监测提供了强有力的支持。
参考文献
水环境遥感监测技术的应用研究进展
[J].
Application of remote sensing technology in water environment monitoring
[J].
Towards a unified approach for remote estimation of chlorophyll-a in both terrestrial vegetation and turbid productive waters
[J].
Calibration and validation of a generic multisensor algorithm for mapping of total suspended matter in turbid waters
[J].DOI:10.1016/j.rse.2009.11.022 URL [本文引用: 1]
Optical characterization of black water blooms in eutrophic waters
[J].DOI:10.1016/j.scitotenv.2014.02.113 URL [本文引用: 1]
MERIS-based ocean colour classification with the discrete Forel-Ule scale
[J].DOI:10.5194/os-9-477-2013 URL [本文引用: 2]
Hue-angle product for low to medium spatial resolution optical satellite sensors
[J].DOI:10.3390/rs10020180 URL [本文引用: 1]
True colour classification of natural waters with medium-spectral resolution satellites:SeaWiFS,MODIS,MERIS and OLCI
[J].DOI:10.3390/s151025663 URL [本文引用: 3]
Trophic state assessment of global inland waters using a MODIS-derived Forel-Ule index
[J].DOI:10.1016/j.rse.2018.08.026 URL [本文引用: 1]
MODIS-Based radiometric color extraction and classification of inland water with the forel-ule scale:A case study of Lake Taihu
[J].DOI:10.1109/JSTARS.4609443 URL [本文引用: 1]
Recognition of water colour anomaly by using hue angle and Sentinel 2 image
[J].DOI:10.3390/rs12040716 URL [本文引用: 3]
150 shades of green:Using the full spectrum of remote sensing reflectance to elucidate color shifts in the ocean
[J].DOI:10.1016/j.rse.2020.111900 URL [本文引用: 2]
Algorithms and schemes for Chlorophyll a estimation by remote sensing and optical classification for Turbid Lake Taihu,China
[J].DOI:10.1109/JSTARS.4609443 URL [本文引用: 1]
Using hyperspectral data to quantify water-quality parameters in the Wabash River and its tributaries,Indiana
[J].DOI:10.1080/01431161.2015.1101654 URL [本文引用: 1]
利用高光谱数据估算太湖水体CDOM浓度的神经网络模型
[J].
Remote sensing retrieval of CDOM concentration in Lake Taihu with hyper-spectral data and neural network model
[J].
崇明岛“闸控型”河网水体富营养化特征及其影响因素
[J].
Characteristics of eutrophication and its affecting factors in gate-controlled river network system of Chongming Island
[J].DOI:10.18307/2013.0309 URL [本文引用: 1]
上海市大莲湖生态修复区富营养化评价及氮磷平衡研究
[J].
Assessment of eutrophication and N,P balance in Dalian Lake ecological restoration region of Shanghai City
[J].
水体光谱测量与分析Ⅰ:水面以上测量法
[J].
The Methods of water spectra measurement and analysis I:Above-water method
[J].
The chequered history of the development and use of simultaneous equations for the accurate determination of chlorophylls a and b
[J].DOI:10.1023/A:1020470224740 URL [本文引用: 1]
Absorption by dissolved organic matter of the sea (Yellow Substance) in the UV and visible domains
[J].DOI:10.4319/lo.1981.26.1.0043 URL [本文引用: 1]
无人机高光谱成像仪场地绝对辐射定标及验证分析
[J].
In-Flight Absolute Radiometric calibration of UAV hyperspectral camera and its validation analysis
[J].
Reflectance-and radiance-based methods for the in.flight absolute calibration of multispectral sensors
[J].
Sensing an intense phytoplankton bloom in the western Taiwan Strait from radiometric measurements on a UAV
[J].DOI:10.1016/j.rse.2017.05.036 URL [本文引用: 2]
The extraction of urban surface water from hyperspectral data based on spectral indices
[J].DOI:10.1007/s12524-018-0828-5 URL [本文引用: 1]
基于光谱维变换的高光谱图像目标探测研究
[D].
Target detection on hyperspectral imagery based on transformation of spectral dimensions
[D].
The fast fourier transform
[J].
Data Users Handbook Version 2.0.Department of the Interior
[R].
A transformation for ordering multispectral data in terms of image quality with implications for noise removal
[J].DOI:10.1109/36.3001 URL [本文引用: 1]
An operational method for estimating signal to noise ratios from data acquired with imaging spectrometers
[J].DOI:10.1016/0034-4257(93)90061-2 URL [本文引用: 1]
湖泊富营养化评价方法及分级标准
[J].
Evaluate method and classification standard on lake eutrophication
[J].

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}