

0 引言
海洋测绘是一切海洋经济开发与国防活动的基础,海洋中的海岛、岛礁及其周边海底地形测量是海洋测绘最基本的任务之一[1]。传统的海底地形测量主要是利用船载单波束/多波束等方法,虽然具有较高的测量精度,但是由于船体无法进入沿岸水产养殖、浅水和岛礁密集水域,无法满足高精度近岸海底地形测量的需求。
针对海岸带综合地质调查工作的需求,中国自然资源航空物探遥感中心于Teledyne Optech公司定制了新一代CZMIL Nova机载激光雷达测深测量系统,该系统集成了测深激光雷达、CASI-1500h高光谱成像仪、Phase One iXU-RS1000数字相机等多种遥感传感器。依托中国地质调查局海岸带综合地质调查工程,开展了机载激光雷达测深测量系统的试生产工作。本文基于机载激光雷达测深系统CZMIL Nova,以岛屿海陆一体地形测量的初步应用为例,介绍其海陆地形一体化测量方法原理、影响因素和技术流程。
1 机载激光雷达测深系统
机载激光雷达测深技术在国外一些海洋国家发展比较迅速,如美国、瑞典、澳大利亚、加拿大等,已研制出多种较为成熟的机载激光雷达测深系统,并配备相应的数据处理软件。其中,代表性的有Teledyne Optech公司的CZMIL系列、Leica公司的Hawk Eye系列、RIEGL公司的VQ系列和Fugro公司的LADS系列。这些机载激光雷达测深系统具有大功率、高精度、高效率、测深能力强的特点[5,6]。根据文献[1,2,3,4,5,6,7,8,9,10,11,12,13,14,15,16]归纳总结各种系列产品代表性测深设备的标称技术指标,详细指标见表1。从设备的扫描宽度、激光频率、最大探测水深、测深精度、激光测点密度等技术指标可以看出这些设备各有优势。本文以CZMIL Nova系统为例,介绍机载激光雷达测深系统在海陆一体地形测量应用上的方法原理、影响因素和技术流程。表中,Kd为机载激光雷达水深测量系统测深工作波长处的漫衰减系数; d为测量深度(单位: m); 2σ表示2倍中误差。
表1 典型机载激光测深雷达系统主要技术指标
Tab.1
| 类别 | 技术指标 | CZMIL Nova | Hawk Eye III | VQ-880G | LADS MK III |
|---|---|---|---|---|---|
| 一般指标 | 工作航高/m | 400 ~1 000 | 400 ~600 | 600 ~1 600 | 400 ~1 000 |
| 飞行速度/kts | 140 ~175 | 140 ~175 | 140 ~175 | 125 ~175 | |
| 测量指标 | 激光扫描频率/kHz | 水深70/10地形 80 | 水深35/10地形 500 | 550 | 512/1.5 |
| 最大测深 | 1.5 secchi | 标称3.0 secchi 最深可达80 m | |||
| 浅水2.0/ | 浅水2.2/ | ||||
| 深水4.2/ | 深水4.0/ | ||||
| 测深精度 | 0.025 m | 0.5 m | |||
| 水深 0.8 m×0.8 m 陆地 0.3 m×0.3 m | 水深 0.8 m×0.8 m 陆地 0.1 m×0.1 m | ||||
| 测点密度 | 标称69 pts/m2 | 2 m×2 m |
2 CZMIL机载激光雷达测深系统
2.1 CZMIL 机载激光雷达测深原理
CZMIL Nova系统的测深激光雷达在进行测量作业时同时发射1 064 nm(近红外波段)和532 nm(绿波段)的大能量、窄脉冲、高保真度的激光[8]。其中红外波段不易穿透海水从而探测到水面后就进行回波; 而波长处于0.47~0.58 μm之间的绿光穿透海水时的衰减最小,穿透性强且方向性好,可探测到海底,并被海底反射最终被传感器接收[9]。通过测量激光在海面和海底的往返时间差,即可利用水中光速计算出海面至海底的瞬时水深值; 通过系统获取的定姿定位参数计算激光在陆地和海底的三维坐标,即可得到海陆一体地形数据,机载激光测深原理示意见图1[10]。图中波形图中第1个波峰代表水面回波信号; 第2个波峰代表水底回波信号,2个波峰之间的时间差即为激光在海面和海底的往返时间差。
图1
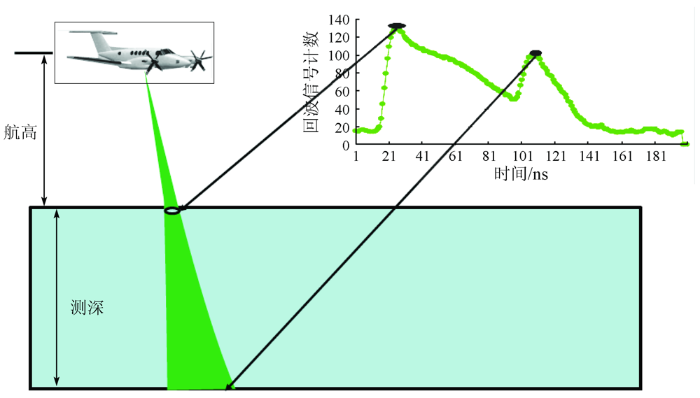
图2-1
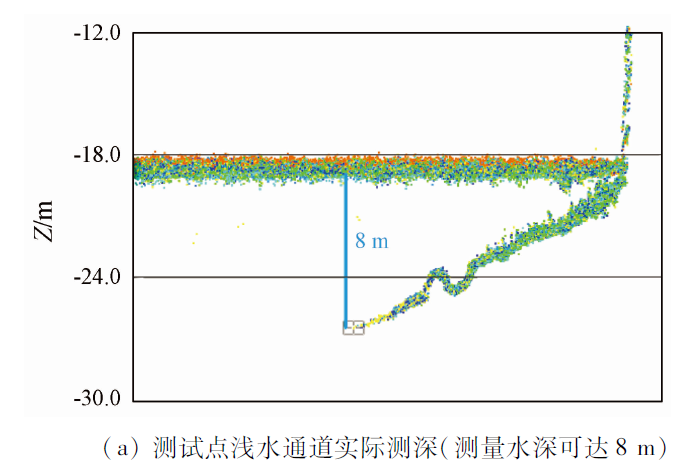
图2-1
机载水深测量系统激光地形测量剖面分析
Fig.2-1
Profile analysis of ALB system based on topographic survey
图2-2
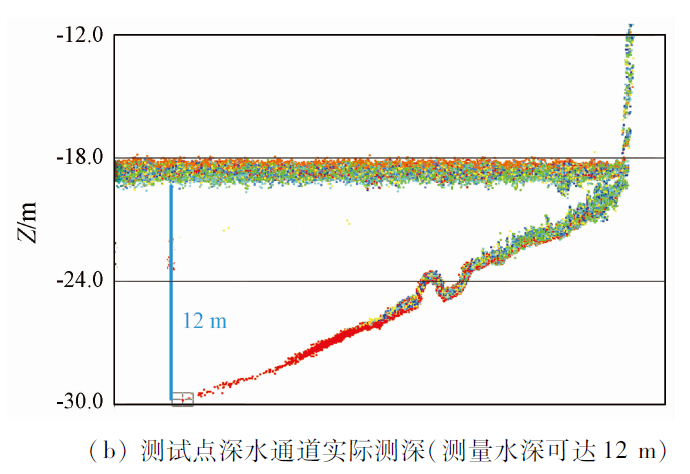
图2-2
机载水深测量系统激光地形测量剖面分析
Fig.2-2
Profile analysis of ALB system based on topographic survey
2.2 CZMIL 机载激光雷达测深系统产品
CZMIL Nova系统集成了3种传感器,因此该系统在海岸带及岛礁调查中能够通过一次飞行同时获取多种数据,并通过配套的HydroFusion软件高自动化生成海岸带地区海陆一体的三维地形和其他不同层次的产品。其代表性的数据产品有海岸带地形、海底底质分类以及水体的光学参数等,从CZMIL的官方介绍(
1)L0,原始级。主要包括激光(light detection and ranging,LiDAR)原始数据、高光谱原始数据、数字相机原始影像,此外还包括机载定位定向系统(position orientation system,POS)数据、地面GPS基站数据等辅助数据,由外业飞行直接获取。
2)L1,基础级。主要包括LiDAR三维点云、高光谱正射影像、数字相机正射影像等,是系统机载测深测量最主要和最基本的产品。
3)L2,成果级。在基础级产品的基础上,经过大量人工操作而处理生成的产品。
基于LiDAR三维点云,可生成LiDAR高程影像图(即海陆一体地形)、LiDAR裸露地表数字高程模型、水陆分类图、LiDAR底部反射图、等深线图及实时水深图等,需要结合其他专业软件完成。基于高光谱正射影像,开展水色遥感研究,可生成相关参数图件。
4)L3,应用级。在基础级产品和成果级产品的基础上,针对具体的应用,经过多传感器融合处理或经过遥感解译而生成的产品。
2.3 CZMIL系统海陆一体地形测量
图3
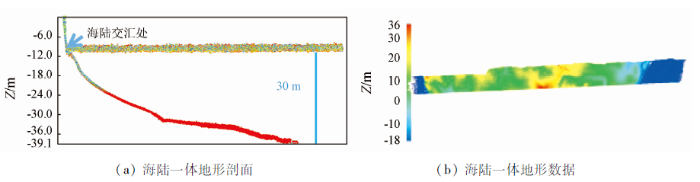
图3
CZMIL Nova 海陆一体地形测量
Fig.3
Land and sea integrated topographic survey(CZMIL Nova)
3 CZMIL海陆一体地形测量影响因素
结合本次机载激光雷达海陆一体测量试生产项目,要保证激光点云地形成果的准确性和完整性,规划数据获取任务时需考虑以下几项关键问题。
3.1 海底底质对测量的影响
在进行激光测深的时候,海底底质的反射率对测量结果将产生很大的影响。不同区域的底质特征会有很大的差异,这会造成底部反射光强度的不同,给运用激光遥感技术测量水深的精度造成很大的影响。图4(a)为Optech公司提供的底部反射率与ΔKdDmax的关系,可以看出,在底部反射率降到10%以后,KdDmax将下降0.2; 在底部反射率为15%时,对KdDmax无影响,指向“0”(图中红点处),所以CZMIL系统标称的最大测深计算公式,是在底部反射率达到15%时才有效。从3种不同类型土壤的反射波谱曲线(图4(b))看出,在波长为532 nm的光谱内,砂(粗砂)的反射率大约为15%; 腐泥(淤泥)的反射率约为5%; 粉砂(细砂)的反射率约为30%。因此,当海底为较亮的砂子时,按照公式计算Dmax会比预测较大,若海底为污泥时,Dmax会比预测值小。不过,相对海底底质而言,海水清澈度对仪器最大测深的影响要重要的多。
图4
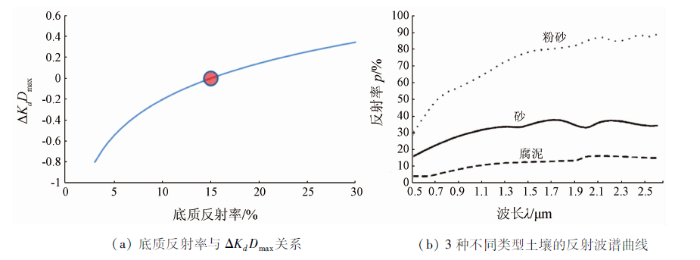
图4
底质反射率曲线(摘自中心仪器测试报告)
Fig.4
Bottom reflectivity curves (taken from test report of AGRS)
3.2 系统最大探测深度
最大探测深度是激光测深系统的重要技术指标,在测量作业开展前,需对系统在测区内水体的最大探测深度进行评估,根据系统测深能力进行合理的航线设计,避免无效的飞行作业。该项技术指标可用两种方法来衡量。
1)圆盘透明度(secchi disc depth,SDD)。将圆盘沉入水中,直至其模糊看不清,量测此时圆盘所处深度,重复多次取其均值,此深度即为secchi depth,也称海水的圆盘透明度。表1可见,典型机载激光雷达测深系统中,最大探测深度为圆盘透明度的2~3倍。
2)利用水体532 nm波段的漫衰减系数(Kd(532))和水体底部反射率来表征,经验计算公式为:
表2 CZMIL系统最大探测深度(Optech,2013)
Tab.2
| 水质情况 | Kd值 | Dmax(白天)/m | Dmax(夜间)/m |
|---|---|---|---|
| 非常洁净 | 0.07 | 50 | 71 |
| 洁净 | 0.10 | 35 | 50 |
| 水质情况 | Kd值 | Dmax(白天)/m | Dmax(夜间)/m |
| 一般洁净1 | 0.15 | 23 | 33 |
| 一般洁净2 | 0.20 | 18 | 25 |
| 浑浊 | 0.30 | 12 | 17 |
| 非常浑浊 | 0.50 | 7 | 10 |
3.3 气象条件影响
机载激光雷达测深能力还会受到测区水体周围环境影响,如风浪、雨雪、云雾、赤潮等。大风引起的海浪等同于浑浊水体,海浪打到岸边会形成白涌浪(白色的泡沫),光在气泡里面不停折射,能量极大损失,无法穿透泡沫达到海底。因此,在一些近岸沙滩(易起碎浪)和悬崖处,在浪大的时候用激光测量海底点易丢失。另外,赤潮也是一个影响激光采集的因素,赤潮是海水中某些浮游植物、原生动物或细菌爆发性增殖或高度聚集而引起水体变色的一种有害生态现象。由于水中浮游生物/藻类的生长,导致系统可能无法穿透这些藻类,并将这些生物/藻类的特征反映到点云,形成水中的噪点层。
因此,在激光雷达测深作业前,需要综合考虑天气、气候等因素,并非任何水域都能得到理想的测深结果,避免大风大浪时开展飞行作业,才能保证海陆一体地形测量的连续性。
3.4 数据获取需注意问题
按照Optech对仪器出厂培训的要求,为保证获取的点云数据最终处理精度,对地面基站布设和机载POS系统提出相应要求。同步GPS 基站的布设或连续运行的CORS 站的选择,应考虑基站或CORS 站离作业飞行区最远的距离应控制在30 km 范围内。每个架次飞行作业后需预检查POS解算数据的以下几个指标,确保各项指标均在限差范围内: L1/L2载波信号无失锁情况,飞机的定位定姿数据解算结果应符合POS系统数据处理的精度要求(《GB/T 27919—2011 IMU/GPS辅助航空摄影技术规范》); 同时,CZMIL系统对相对航高的反应较灵敏,不同的作业高度需选用不同的模式文件(mode file),要求飞行员在作业过程中保持计划的航高,允许的航高上下浮动范围为±30 m。
4 岛屿海陆一体地形测量初步应用
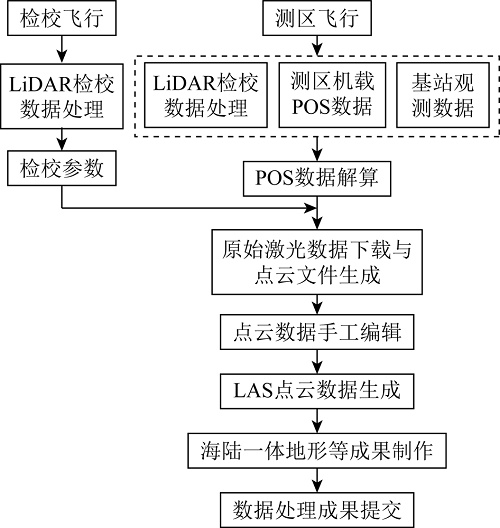
本文结合“海岸带综合地质调查工程”海陆一体地形测量实际生产应用经验,对CZMIL系统的数据获取、数据处理和结果分析进行介绍,技术流程见图5。
图5
4.1 工作区概况
工作区位于北海市北部湾海域中部,为一个距陆地约50 km的海岛。海岛形近似于圆形,东西宽约6 km,南北长约6.5 km,面积约25 km2。该岛位于沿海大陆架之上,岛的南半部以海蚀地貌为主,北半部则以海积地貌为主。岛的地势为南高北低,海拔最高约79 m,自南向北逐渐倾斜,逐渐过渡到平坦宽阔的海滩。海域水体较为清澈,根据反演的Kd值可知,CZMIL系统在该区最大测深预估可达15 m,具有较大应用潜力。
4.2 海陆一体地形测量
4.2.1 数据获取
飞行平台选用运-12 E型飞机,飞行高度为400 m,航线间距约为200 m(相邻航带重叠30%),飞行速度平均为220 km/h,测量时间为秋季。在飞行的同时,地面采用Trimble R5型接收机同步开展GNSS基准站观测,用于机载POS数据的差分解算。该工作区采集到的LiDAR测深数据包括LiDAR原始数据、机载POS数据和地面GPS基站数据。对每个架次数据进行预处理,开展机载POS数据与地面基站数据联合解算和质量检查,确保数据结果精度满足相关规范精度要求,将最后结果用于激光数据的处理。
4.2.2 数据检校
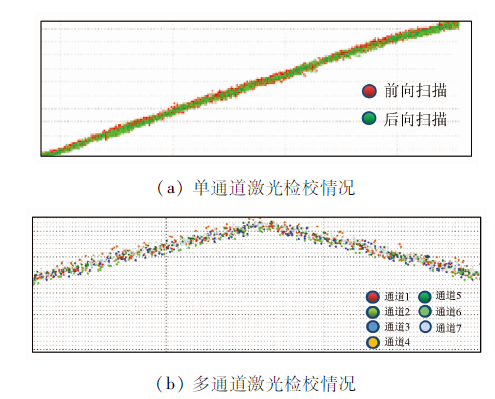
本文所用数据检校结果见图6。系统在飞机上安装之后进行激光检校,需解算出激光9个接收通道在陆域与海域的扫描角偏移、俯仰和翻滚角偏移、距离偏移以及测深偏离等参数,用于对设备进行标校处理,保证各通道接收激光无偏差,且激光数据与测量控制数据无偏差。在陆地和水域分别布设检校场,陆地检校场用于校正陆地通道,以及其和浅水通道的偏差; 水域检校场用于校正激光测深偏差,以及浅水通道和深水通道的偏差[15,16]。需要说明的是,系统在交付使用前,Optech公司利用美国的检校场对设备开展了出厂检校,利用提供的检校文件作为初始值,微小调动个别参数后,通过选取同一地物激光剖面发现单通道各扫描方式之间激光数据吻合较好,浅水各通道激光数据已无偏差(图6)。即可利用此检校文件开展后续处理工作。
图6
4.2.3 精度评定
影响激光雷达测深精度的因素比较多,进行精确的精度验证较为困难。本次作业采取的精度验证方法非常粗略,根据收集到的多波束数据分布情况,选定工作区以外另一水质清澈水域作为测试样区,进行了激光测量精度的评估。通过区域内30 m深度附近40个点数量的多波束测深数据,并将测深数据转化为WGS-84系统下的椭球高,保证其与激光点云数据代表相同的地理意义。在多波束测深数据点有效半径范围内,与激光点云数据进行比较,统计平均误差、标准差和均方根误差,精度均在系统标称范围内(表3)。
表3 测试区激光测量精度统计
Tab.3
| 统计参数 | 深度 | 平均误差 | 标准差 | RMSE | 系统标 称精度 |
|---|---|---|---|---|---|
| 数值 | 30 | -0.304 | 0.211 | 0.369 | 0.492 |
4.2.4 数据处理与产品制作
利用设备配套的HydroFusion等软件完成机载激光雷达数据处理,生成工作区海陆一体地形产品,以高程渲染图表现,主要包含以下4个步骤:
1)原始数据下载和同步。利用机载POS解算结果、飞行设计文件、系统参数等文件,完成原始激光雷达数据下载,及其与机载POS数据的融合处理。
2)激光点云生成。利用下载的激光雷达数据,探测每个雷达波形中的陆地、水面和水底位置,利用飞机的定位定姿数据和激光的指向信息,计算陆地、水面和水底的激光三维椭球坐标,生成WGS-84椭球坐标系下标准格式的LAS点云数据。
3)激光点云人工编辑。对每条航带的三维激光点云数据进行模型建立,也可按区域范围(block)生成点云模型,导入到HydroFusion软件的CME(CZMIL Manual Editor)模块中进行噪声点人工去除,生成只包括陆地、海底地形的LAS点云数据。
4)海陆一体高程渲染图生成。利用地理信息系统软件,对点云数据进行二次编辑,保留可成图数据,删除局部离散的散点; 对点云数据进行栅格化处理,生成规定采样间隔的海陆一体数字高程图,并按照高程值对其进行渲染处理,叠加山体阴影,生成具有立体、彩色效果的海陆一体高程渲染图,以供后续应用解译使用。本次制图对于陆域点云编辑较为粗略,高程图例最高值选取为统计陆域地表高程最大值。在沿岸选取3处海陆区域,清晰可见海底地形细节(图7)。
图7
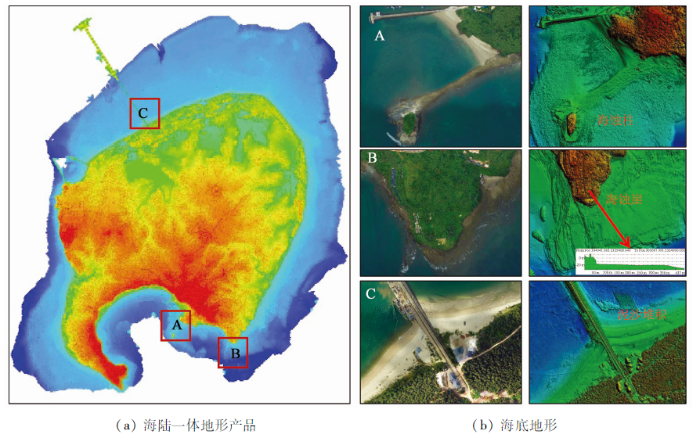
图7
海陆一体地形产品应用
Fig.7
Application of land and sea integrated topographic products
4.2.5 数据分析
分别在岛的南岸和北岸选取典型地貌特征区域,分析其在影像和激光水深数据上的特点,见图7中标识A—C区域。
1)A区域。A区域位于南湾港口东侧,该处有一大型海蚀柱。从海底地形数据上可见其四周为海蚀崖,南部崖脚前缘形成海蚀平台,平台较为平坦; 而东部崖脚海蚀平台堆积有许多崩塌下来的大岩块。结合影像数据可见海蚀柱顶部生长杂草、树等绿色植物。
2)B区域。潮间带附近的岩石在海浪和潮汐的交相侵蚀下遭到破坏,形成呈层分布的海蚀洞穴,当洞穴上部的岩石失去支持后沿垂直节理断裂或崩溃下来,便形成陡峭的海蚀崖。B区域为湾仔一带,海蚀地貌比较典型,这些海蚀崖高度在20~50 m之间,坡度略陡峭; 得到红色箭头处的地形剖面,可以看出,该处的海蚀平台落差有近20 m,平缓较长一段平台后,又有一个10 m内的小落差。
3)C区域。C区域位于岛北部,海底地形较为平坦,海底地貌主要有水下岸坡和砂质堆积。其中,水下岸坡呈带状环岛分布,坡度较大,海积微地貌景观清晰可见,从海底地形数据纹理信息看底质粒度较粗。
5 结论
本文介绍了机载激光雷达测深系统CZMIL Nova的基本情况和测深原理,结合工程试生产任务,对系统的海陆一体地形测量技术进行了分析阐述,梳理出影响测量质量的关键问题,总结出数据获取、数据处理及海陆一体地形产品制图等步骤流程。利用系统获取的海底地形数据,结合一些影像数据,可对海底地貌进行有效分析解译,填补了近岸地区因“人下不去,船上不来”的数据空白,扩展了我国大陆海岸带及岛礁机载激光测深调查工作的应用领域。
实际作业中发现,影响激光测深效果主要因素是水质的清澈度,同时也受底部反射率、飞行稳定性、作业环境条件等其他因素影响。在工程项目实施前,应综合考虑这些影响因素,对激光测深潜力进行分析判断,合理规划测深作业区域。
本次研究结果对国内开展机载激光雷达测深工作规划、技术研究和行业应用具有参考价值。为更加深度挖掘和利用好数据,加强研究浑浊水域激光测深效果提升方法和数据处理方法优化,加大与国内相关行业的合作; 通过国内产学研多部门合作,进一步推进国内机载激光雷达水深测量技术的应用与推广。
志谢
在项目研究和本文编写过程中,得到了张永军教授的指导和帮助,余学中教授、王建超教授的鼎力支持; 野外飞行队员于坤、李勇志、张文凯等人的辛苦付出,在此一并表示衷心感谢。
参考文献
机载激光测深作业的关键技术问题
[J].
The key technical issues on airborne LiDAR bathymetry operation
[J].
机载激光测深技术及其研究进展
[J].
Research progress of airborne laser bathymetry technology
[J].
机载激光测深技术
[J].
Technology of airborne laser bathymetry
[J].
机载激光测深技术研究进展
[J].
The development of airborne laser bathymetry
[J].
机载LiDAR测深在海洋测绘中应用的可行性分析
[J].
The feasibility analysis for the airborne LiDAR bathymetry application in marine surveying and charting
[J].
国产机载双频激光雷达探测技术研究进展
[J].
Research progress of domestic airborne dual-frequency LiDAR detection technology
[J].
Overview of the coastal zone mapping and imaging LiDAR(CZMIL):A new multi-sensor airborne mapping system for the U.S. army corps of engineers
[C]
机载LiDAR在海岸带地形测量中的应用
[J].
Application of airborne LiDAR to coastial topographic survey
[J].
机载激光水深探测技术基础及数据处理方法研究
[D].
Research on principle and data processing methods of airborne laser bathymetric technique
[D].
Conceptual design of the CZMIL data acquisition system (DAS):Integrating a new bathymetric lidar with a commercial spectrometer and metric camera for coastal mapping applications
[C]
机载激光雷达测深系统大规模应用测试与评估——以中国海岸带为例
[J].
Large-scale application test and evaluation of an airborne lidar bathymetry system——A case study in China’s coastal zone
[J].
Overview of the coastal zone mapping and imaging LiDAR (CZMIL):A new multi-sensor airborne mapping system for the U.S. Army Corps of Engineers
[C]
CZMIL机载激光测深系统及其在骆马湖测深试验评估
[J].
CZMIL airborne laser sounding system and its testing evaluation in Luoma Lake
[J].

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}