0 引言
遥感图像是用来描述地表信息的重要数据源,能否获取清晰、高质量的遥感图像直接关系到有用信息的提取、分析和应用。但是在采集、切换和传送遥感图像时,常常因为仪器性能、操作手段或者成像环境,导致图像被脉冲噪声所冲击,造成图像质量下降。因此,在利用遥感图像解决深层问题之前,选择合适的方法在去除脉冲噪声的同时,有效保留遥感图像原有的有用信息(如边缘和细节等)就显得至关重要。
遥感图像去噪的方法可以基于不同的理论模型,比如概率统计、偏微分方程、稀疏表示以及多尺度分析等[1 ⇓ ⇓ ⇓ ⇓ -6 ] 。DBA算法[5 ] 、NSBMF[6 ] 等非线性方法是在统计的基础上添加噪声判断,而文献[2 ]提出了一种基于梯度倒数的自适应开关算法对噪声进行判断并消除。此外,为了解决遥感图像在滤波过程中丢失细节信息的问题,文献[3 ]提出使用组合滤波方法,在利用多尺度分析和中值滤波后,提取边缘信息,将提取结果再融合到消噪后的遥感影像中,以此提升细节信息。以上方法的共同特点是先对随机脉冲噪声与信号点进行分类[4 ] ,再对噪声点进行消除,那么分类的准确性会直接影响着滤波的效果。
事实上这种分类问题可以视作是一种不确定性问题,因为被脉冲噪声冲击的遥感图像在某些像素点上会发生不确定性的突变,这种不确定性主要体现在突变像素强度的不确定性、突变位置的不确定性和突变数量的不确定性。D-S证据理论具有表达“不确定”和“不知道”的能力,在没有先验信息的情况下它对不确定性和非精确性进行建模有着不错的灵活性和有效性[7 ] 。因此,它比一般概率理论的适用范围更加广泛,作为解决不确定性问题的有力工具,它已经被应用到许多实际领域,如目标识别、遥感分类和图像分割等[8 ⇓ -10 ] 。D-S证据理论已经成为不确定性信息处理与信息融合领域的重要理论,但是很少有人将该理论与图像脉冲噪声和信号点的分类问题结合起来。
直到2018年Zhang等[11 ] 提出了ASMF-DBER算法,同时考虑脉冲噪声间断特征和极值特征2种准则进行了不确定性建模,创新性地将D-S证据理论应用到了噪声与信号的分类上,并取得了不错的结果。但是在证据高度冲突的情况下,仅使用2个特征和冲突系数无法准确显示融合的效果。比如,在脉冲噪声密度较高时,图像由于受到大量脉冲噪声的冲击而遭到严重损坏,ASMF-DBER算法中的2个特征准则融合后的结果出现了违背直觉或者难以分类的情况,本文考虑添加第3种特征来降低遥感图像中出现的证据高度冲突发生的可能性。所谓“高度冲突”的情况在本文中主要表现为以下几种情况: 一是遥感图像脉冲噪声密度过大; 二是待分类的像素处在遥感图像的边缘位置或者处在图像明暗区域的交界处; 三是待分类的像素恰好体现遥感图像的细节信息。一直以来这些情况下的噪声消除都是难以解决的。
为了更加有效地刻画遥感图像的固有结构、边缘以及纹理等细节特征,并尽可能地将脉冲噪声从遥感图像中去除掉,本文把脉冲噪声的3个特征准则: 极值性、间断性和相似性作为证据,提出多特征准则模型,再根据BJS散度和信度熵,构建新的权重分配以解决证据融合出现的高度冲突的问题,然后综合评估每个像素被判断为噪声点的概率大小,即通过概率决策完成分类。另外,在消除噪声的阶段,采用的是自适应中值滤波方法。需要指出的是本文的重点是脉冲噪声与信号的分类,分类的准确性是本文重点研究的内容。实验结果证实本文算法在能够提高图像滤波后的信噪比的同时,还做到了有效保留遥感图像原有的边缘细节等信息,即使是在高度冲突的情况下也有理想的结果。
1 不确定性噪声模型及证据理论
1.1 脉冲噪声模型
为了描述脉冲噪声的不确定性,本文选择文献[12 ]中的噪声模型,当图像(以8位灰色图像为研究对象)被脉冲噪声破坏后,噪声随机出现在像素集合N 1 = { 0,1 , 2 , … , l } N 2 = { 255 - l , 255 - ( l - 1 ) , … , 255 }
(1) f ( x i , j ) = p 2 ( x i , j ∈ N 1 ) 1 - p ( x i , j = S i , j ) p 2 ( x i , j ∈ N 2 )
式中:x i , j S i , j i j p l = 2 l = 0
1.2 D-S证据理论
由n Θ Θ = { N , S } N 为脉冲噪声,S 为非脉冲噪声(以下称为信号)。对于辨识框架Θ 2 Θ m m : 2 Θ → [ 0,1 ] m ( Ø ) = 0 , ∑ A ∈ Θ m ( A ) = 1 m m ( A ) A
在辨识框架Θ n m 1 , m 2 , … , m n A 1 , A 2 , … , A n n
(2) m (A) = 1 K ∑ ⋂ i = 1 n A i = A ∏ i = 1 n m i ( A i ) ( A ≠ Ø ) 0 ( A = Ø )
式中冲突系数K = ∑ ⋂ i n A i ≠ Ø ∏ i n m i ( A i ) K < 1
概率转换函数[13 ] 是指假设m ( A ) Θ B e t p
(3) B e t p ( θ i ) = ∑ θ i ∈ A m ( A ) A , ∀ θ i ∈ Θ
式中A A θi 为脉冲噪声N 或非脉冲噪声S 。一般地,通过辨识框架Θ B e t p
2 多特征准则融合的分类算法
2.1 脉冲噪声的多特征准则不确定性建模
与相邻信号相比,被脉冲噪声污染的像素有显著的特征,比如: 极值性、相似性以及间断性。本文根据这些特征利用区间距离、相似度函数以及像素的相对差异分别构造特征准则证据m 1 m 2 m 3
2.1.1 极值性特征准则BPA的构造
由噪声模型可以看出,脉冲噪声像素的强度主要分布在0或者255附近,接近或者达到极值。为了将噪声和信号点进行分类,本文利用区间距离来描述像素的强度和极值之间的接近程度,定义为[14 ] :
(4) d ( a , b ) = 3 ( a 1 + a 2 ) - ( b 1 + b 2 ) 2 2 + ( a 2 - a 1 ) - ( b 2 - b 1 ) 2 2
式中a b a = ( a 1 , a 2 ) b = ( b 1 , b 2 ) x
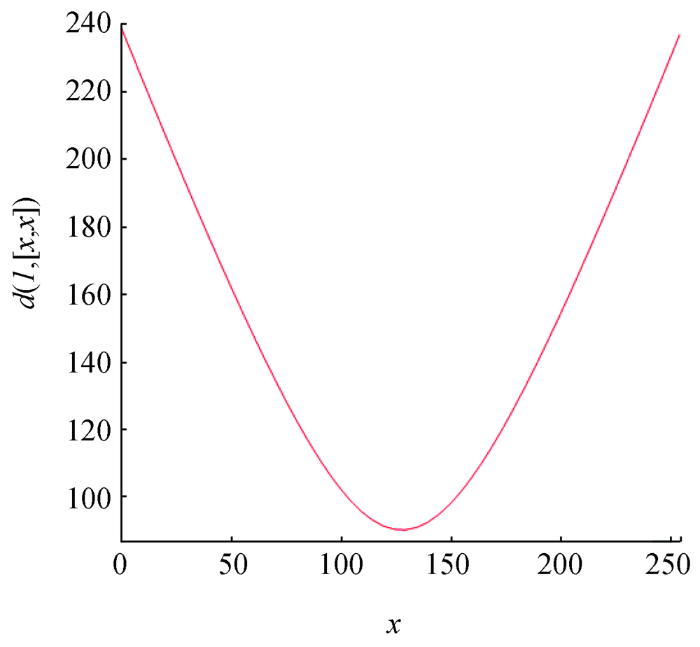
(5) d ( I , [ x , x ] ) = ( I m a x - I m i n - 2 x ) 2 + ( I m a x - I m i n ) 2
这里I = [ I m i n , I m a x ] I m i n I m a x x ∈ [ I m i n , I m a x ]
如图1 所示,当x d ( I , [ x , x ] ) x d ( I , [ x , x ] ) x I m i n I m a x m 1
(6) m 1 ( N ) = d c - d 0 + ε d e x t - d 0 + ε m 1 ( S ) = 1 - d c - d m e d d e x t - d m e d m 1 ( Θ ) = 1 - m 1 ( N ) - m 1 ( S )
式中:d c I d 0 I d e x t 为 I I m i n I m a x ) 的距离;d m e d 为 I I m 1 ( N ) 11 ]中m 1 ( N ) 11 ]的m 1 ε ( 取ε = 0.001 ) 去调整BPA函数,避免了这种情形下的高度冲突结果的发生。
图1
图1
不同像素的d ( I , [ x , x ] )
Fig.1
d ( I , [ x , x ] )
2.1.2 相似性特征准则BPA的构造
往往图像的细节信息与周围信号既有差异性又有相似性,只用极值性特征准则进行分类还不够准确,本文用待分类像素与窗口内其他信号的差异,作为分类的又一依据来构建相似性特征准则BPA函数。
若以( i , j ) W F ( i , j ) = x i - s , j - t - ( W F - 1 ) 2 ≤ s , t ≤ ( W F - 1 ) 2 , s , t ∈ Z W F × W F
(7) r g ( x i , j ) = x i , j - x i - s , j - t
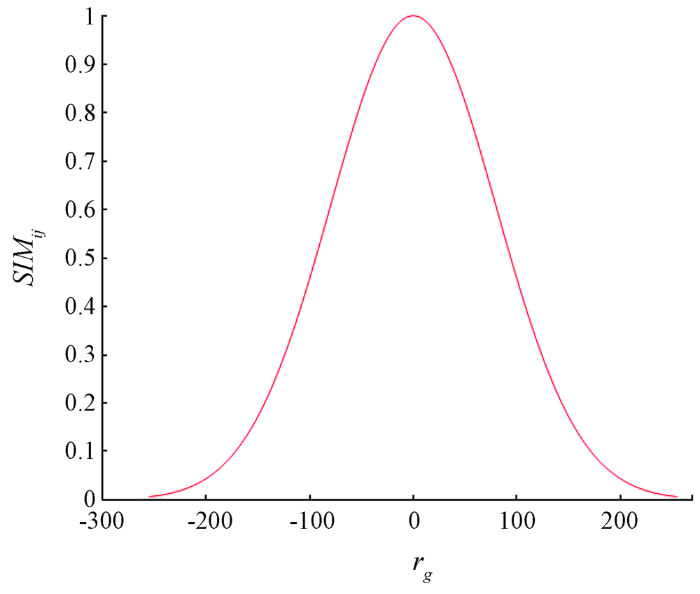
式中: rg (xi , j g = 1,2 , … , W F × W F x i , j ( i , j ) x i - s , j - t ( i - s , j - t ) SIMij 为x i , j [15 ] ,公式为:
(8) S I M i j = ∑ g = 1 W F × W F e x p - r g ( x i , j ) 2 2 σ μ 2 W F × W F
式中σ μ S I M i j x i , j
(9) m 2 ( N ) = μ · ( 1 - S I M i j ) m 2 ( S ) = μ · S I M i j m 2 ( Θ ) = 1 - μ
式中μ S I M i j 图2 中可以看出: 当r g S I M i j x i , j r g S I M i j x i , j S I M i j μ = 0.9 m 2
图2
图2
r g S I M i j
Fig.2
The curve of relation between r g S I M i j
2.1.3 间断性特征准则BPA的构造
处在明暗交界处的信号往往比其相邻信号的强度高或低很多,这体现了间断性的特征,同时也是脉冲噪声的特点,因此这些信号往往被错误地分类成噪声。本文构建了间断性特征准则BPA,记作m 3
(10) m 3 ( N ) = γ ∑ g = 1 n r g ( x i , j ) n ( I W m a x - I W m i n ) m 3 ( S ) = γ ( 1 - ∑ g = 1 n r g ( x i , j ) n ( I W m a x - I W m i n ) ) m 3 ( Θ ) = 1 - γ
式中:I W m a x I W m i n n W F ( i , j ) γ
当窗口固定时,式(10)中的∑ g = 1 n r g ( x i , j ) ∑ g = 1 n r g ( x i , j ) ∑ g = 1 n r g ( x i , j ) r g ( x i , j ) < ( I W m a x - I W m i n ) ∑ g = 1 n r g ( x i , j ) n ( I W m a x - I W m i n ) m 3 γ = 0.9
2.2 基于信度熵和BJS散度的证据融合
虽然根据脉冲噪声的极值性、相似性、间断性这3个特征进行了不确定性证据建模,但是证据之间的冲突可能还会出现,为了减少证据冲突的可能性,本文提出在利用证据融合规则之前,对特征准则BPA函数进行修正处理,利用BJS散度与信度熵对证据进行重新分配,以校正高度冲突情形下噪声与信号分类的错误结果。
若A i m m 1 m 2 Θ m 1 m 2 [16 ] 可表示为:
(11) B J S ( m 1 , m 2 ) = 1 2 S m 1 , m 1 + m 2 2 + S m 2 , m 1 + m 2 2
式中:S ( m 1 , m 2 ) = ∑ i m 1 ( A i ) l o g m 1 ( A i ) m 2 ( A i ) ; ∑ i m j ( A i ) = 1 ; i = 1,2 , … , M ; j = 1,2 10 - 6
(12) M = 0 B J S 12 B J S 21 0 … B J S 1 n … B J S 2 n ︙ ︙ B J S n 1 B J S n 2 ⋱ ︙ … 0
则证据可信度R e i B J S i j R e i = 1 A c d i , i = 1,2 , … , M A c d i = ∑ j = 1 , j ≠ i M B J S i j M - 1 , i = 1,2 , … , M
事实上,BJS散度的显著特征之一是可以为每种概率分布分配不同的权重,它代表了证据间可靠性的差异大小,2个证据间越相似,BJS散度就越大,尤其在多于2个证据时,它对分类结果会产生至关重要的作用。
此外,当分类的不确定性程度很高时,信度熵越大,得到证据的支持度越少,可以用它来进一步表示信号与噪声分类的不确定性。所以令A i m A i
(13) I C i = e - E d
式中E d = - ∑ i m ( A i ) l o g m ( A i ) 2 A i - 1 , i = 1,2 , … , M A i [17 ] 。
综上,为降低高度冲突发生的可能性,提高分类效果,本文利用BJS散度建立证据可信度R e i I C i
1)BJS散度计算3个证据的差异度量矩阵M i j , 1 ≤ i ≤ 3,1 ≤ j ≤ 3
3)由信度熵计算每个证据的信息量I C i , i = 1,2 , 3
4)由可信度和信息量融合生成新权重W f i = R e i × I C i , i = 1,2 , 3
5)将权重归一化分配给原始证据得到新的证据m ' ( A i ) = ∑ i = 1 3 ( W f i ' × m i ( A i ) ) W f i ' = W f i ∑ i = 1 3 W f i , i = 1,2 , 3
于是再将修改后的证据采用Dempster的融合规则进行自身间的融合,并使用Pignistic概率转换(式(3))得到概率测度B e t p B e t p 图3 。
图3
图3
多特征准则的建模与融合
Fig.3
Modeling and fusion process of multi-feature criterion
本文算法采用先对脉冲噪声与信号分类,再进行噪声消除的思路,提出了基于IBDND[18 ] 的消噪改进方法,步骤如下:
1)将过滤窗口的初始大小W F W m a x
2)设置当前窗口大小W F W F ( i , j ) W F ( i , j )
3)判断在当前滤波窗口中是否满足条件:N u > 1 4 P N t
4)将过滤窗口的大小扩展为(W F + 1 ) × ( W F + 1 ) ,然后重复2)和3),直到当前过滤窗口大小达到最大窗口11×11。
5)对当前过滤窗口应用近似中值像素替换,输出像素值为:
(14) Z i j = Y i j + 1 D ∑ k = 1 N u V u ( k ) - Y i j d i s t ( k )
式中:N u P N t Z i j Y i j V u d i s t ( k ) V u k ( i , j )
(15) d i s t ( k ) = ( a 1 + a 2 ) - ( b 1 + b 2 ) 2 2 + ( a 2 - a 1 ) - ( b 2 - b 1 ) 2 2
式中:a 1 a 2 k b 1 b 2 D = ∑ k = 1 N u 1 d i s t ( k )
3 实验与分析
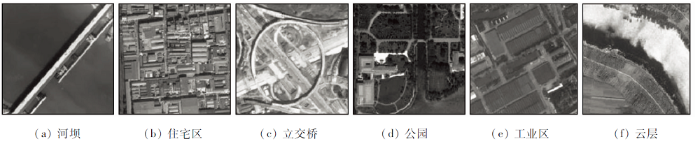
为了验证本文算法的有效性,文章从SIRI-WHU遥感影像中的公园、住宅区、工业区、和河坝等数据库[19 ⇓ -21 ] 里随机选取了6幅含有不同类型地物信息的遥感图像(见图4 )进行实验。这些图像具有区域平滑、色调对比明显或者背景复杂、纹理信息丰富等不同特征。采用的不确定性噪声模型见式(1)。为说明算法的优势,本文还与DBA,NSBMF,IBDND,SAMF[22 ] 以及ASMF-DBER这5种算法进行了比较。实验主要从“高冲突”角度出发,对高噪声密度、边缘、纹理细节等情况进行视觉分析和定量分析。定量指标选择常用的结构相似度(structural similarity index,SSIM)、准确率(accuracy rate,AR)和峰值信噪比(peak signal to noise ratio,PSNR),指标公式如下:
(16) A R = N S - F P - F N N S
(17) P S N R = 10 l g 255 2 M N ∑ i = 1 M ∑ j = 1 N ( x i j ︿ - x i j ) 2
(18) S S I M = ( 2 μ x ︿ μ x + C N 1 ) ( 2 σ x ︿ x + C N 2 ) ( μ x ︿ 2 + μ x 2 + C N 1 ) ( σ x ︿ 2 + σ x 2 + C N 2 )
式中: NS 为像素总数; FP 为误检数; FN 为漏检数;M 和 N x x ︿ μ x ︿ μ x x x ︿ σ x ︿ σ x x x ︿ σ x ︿ x x x ︿ C N 1 C N 2
图4
图4
不同地物信息的遥感图像
Fig.4
Remote sensing images for different ground object
由于本文算法分2步进行,即先将遥感图像中的脉冲噪声与信号分类,再消除噪声,因而先选择了同为2步消噪的IBDND和ASMF-DBER算法进行对比。由式(16)可以看出A R S S I M 图4 (a)为例,表1 给出这2个指标下的对比结果。
从表1 中可以看出,在低噪声密度时,2种指标下的IBDND算法稍逊一筹,当噪声密度达到50%后,即“高度冲突”体现越明显时,本文算法的分类准确率A R S S I M
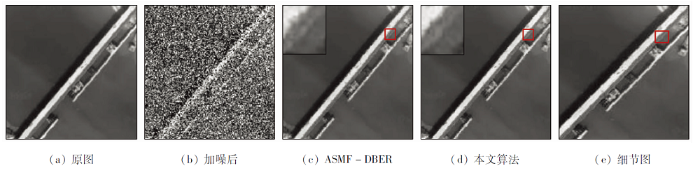
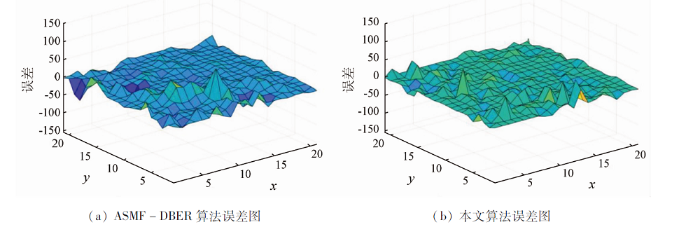
由表1 不难发现,在噪声密度较低时,ASMF-DBER算法的结构相似度略微优于本文算法,但是从定性视觉直观的角度(图5 )能够发现,当噪声密度为50%时,消噪后选定明暗交界处,放大横跨河水两岸的建筑物的部分细节(图5 (e)),可以明显看出ASMF-DBER算法对梯度变化较大的信息保留要稍差,而本文算法符合地理要素的空间自相关性,消噪后遥感图像中的建筑物仍能保持良好的连续性,失真度小,边缘更流畅,对比度损失小。为了进一步说明本文算法对图像边缘或明暗交替的位置具有较高的还原度,本文对河坝图的局部信息(20× 20 的像素区域)进行误差分析,将未污染噪声的细节图与消噪后的细节图做差,生成像素误差图,如果误差分析图越接近0附近的颜色,那么消噪后的误差就会越小。由图6 不难发现相比于ASMF-DBER算法,本文算法误差波动幅度较小,图像颜色显示误差值分布更接近0附近,说明本文算法处理后的细节结果更接近原图像,从而再次说明本文算法对遥感图像的细节保持好,后期应用处理会更具优势。
图5
图5
噪声密度为50%时ASMF-DBER算法与本文算法的对比图
Fig.5
Comparison between ASMF-DBER algorithm and the proposed algorithm at the noise level of 50%
图6
图6
50%噪声密度下的局部信息对比图
Fig.6
Comparison of local information at the noise level of 50%
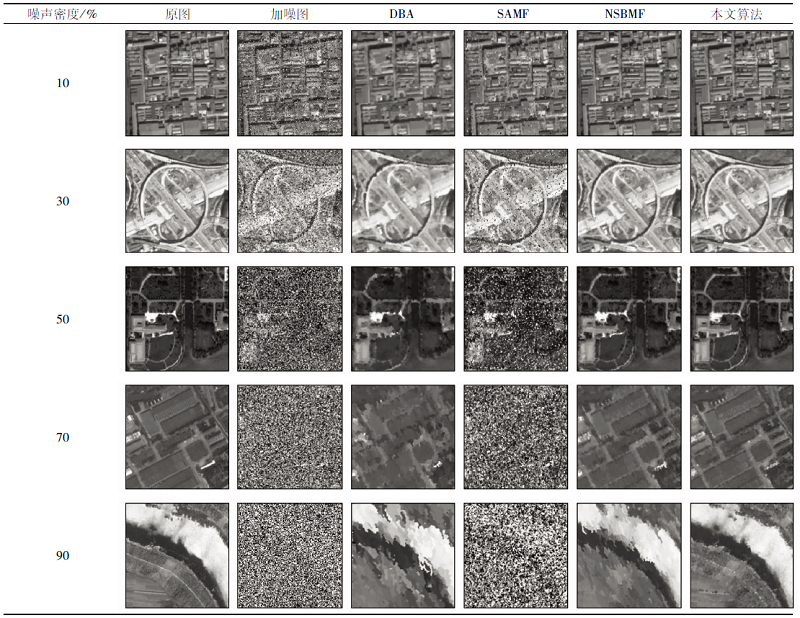
为了进一步从视觉角度说明本文算法适合不同地物类型的遥感图像的去噪,本文将图4 (b),(c),(d),(e)以及(f)添加10%~90%不同密度的脉冲噪声,考察遥感图像被不同噪声密度干扰时的恢复能力。这5幅不同类型的遥感图像中住宅区和立交桥的遥感图像背景相对复杂,像素反差小,细节信息较多; 公园和工业区的遥感图像类型像素强度高低相间,背景相对平滑,图像的连续性较为复杂; 云层图像色调反差大,纹理信息明显。原图及各算法处理后的效果如表2 所示。从中可以看出,SAMF算法由于分类能力最差,明显有大量噪声残留,故仅适用于低噪声密度的情况; DBA算法处理后的图像过于模糊,影响后续的地物信息的提取; NSBMF算法对于细节信息多的遥感图像来说,该方法的弱点就暴露出来,比如边缘连续性差、细节清晰度低、明暗交界的轮廓位置出现了毛糙; 而本文算法对于“高冲突”处理结果理想,噪声提取准确,对于遥感图像中不同类型的地物信息还原性强。同时从表2 中还可以发现,公园和云层的遥感图像中的白色高亮部分经过不同恢复算法后损失严重,这是因为白色高亮部分的像素强度接近脉冲噪声的像素强度,在脉冲噪声的识别过程中容易产生误判。本文利用多特征准则融合算法提取脉冲噪声,有效降低了误判发生的可能性,白色高亮的细节部分得到更好的保留。
为验证不同噪声密度条件下本文算法均有良好的还原能力,当噪声密度由10%变化到90%时,图7 为应用5种算法对图4 不同类型遥感图像分别处理后的定量指标P S N R P S N R
图7
图7
遥感图像的PSNR对比图
Fig.7
Comparison of the PSNR of remote sensing images
4 结论
脉冲噪声的存在极大影响着遥感图像的信息判读与分析,为了实现对遥感图像的高质量复原,扩展遥感图像的应用范围和应用价值,本文提出了多特征准则融合的脉冲噪声识别方法。在文献[11 ]的基础上,本文增加了脉冲噪声的相似性特征,根据脉冲噪声的相似性、极值性和间断性特征进行了新的不确定性建模; 同时利用BJS散度和信度熵对证据进行了新的权重分配,根据D-S证据理论进行了证据融合,避免冲突信息的发生。通过实验得到以下结论:
1)针对被脉冲噪声损坏后的SIRI-WHU影像中工业区、公园等不同类别的遥感图片,本文算法均表现出很强的恢复能力,还原后的遥感影像符合地理要素的空间自相关性,图像清晰且对比度损失小,说明本文算法可以广泛适用于不同类型遥感图像的去噪处理。
2)即使在信息“高冲突”的情况下,本文算法仍然能保证脉冲噪声被准确的识别,完成图像的去噪。在脉冲噪声密度达到90%时,本文算法处理后的遥感图像仍能保持原有的纹理、边缘以及明暗交界等细节信息,图像的连续性仍能保持较佳的水平,说明本文提出的多特征准则信息融合算法适合对细节信息丰富或者被高密度噪声干扰的图像进行恢复处理。
参考文献
View Option
[1]
赵洪臣 , 周兴华 , 彭聪 , 等 . 一种去除遥感影像混合噪声的集成BM3D方法
[J]. 武汉大学学报(信息科学版) , 2019 , 44 (6 ):925 -932 .
[本文引用: 1]
Zhao H C Zhou X H Peng C et al . An integrated BM3D method for removing mixed noise in remoting sensing image
[J]. Geomatics and Information Science of Wuhan University , 2019 , 44 (6 ):925 -932 .
[本文引用: 1]
[2]
汪贵平 , 杜晶晶 , 宋京 , 等 . 基于梯度倒数的无人机遥感图像融合滤波方法
[J]. 科学技术与工程 , 2018 , 18 (31 ):190 -194 .
[本文引用: 2]
Wang G P Du J J Song J et al . A fusion filter method for unmanned aerial vehicle remote sensing image based on gradient inverse
[J]. Science Technology and Engineering , 2018 , 18 (31 ):190 -194 .
[本文引用: 2]
[3]
朱建军 , 周靖鸿 , 周璀 , 等 . 一种新的去除遥感影像混合噪声组合滤波方法
[J]. 武汉大学学报(信息科学版) , 2017 , 42 (3 ):348 -354 .
[本文引用: 2]
Zhu J J Zhou J H Zhou C , et al . A new combination filtering method to removing mixed noise of remote sensing images
[J]. Geomatics and Information Science of Wuhan University , 2017 , 42 (3 ):348 -354 .
[本文引用: 2]
[4]
刘帅 . 基于分层稀疏学习和协同表示的高光谱图像去噪和分类 [D]. 西安 : 西安电子科技大学 , 2016 .
[本文引用: 2]
Liu S . Hierarchical sparse learning and collaborative representation for hyperspectral imagery restoration and classification [D]. Xi’an : Xidian University , 2016 .
[本文引用: 2]
[5]
Srinivasan K S Ebenezer D . A new fast and efficient decision-based algorithm for removal of high-density impulse noises
[J]. IEEE Signal Processing Letters , 2007 , 14 (3 ):189 -192 .
DOI:10.1109/LSP.2006.884018
URL
[本文引用: 2]
[6]
Jayaraj V Ebenezer D . A new switching-based median filtering scheme and algorithmfor removal of high density salt and pepper noise in images
[J]. Journal on Advances in Signal Processing , 2010 (1 ):409 -413 .
[本文引用: 2]
[7]
Dempster A P . Upper and lower probabilities induced by a multivalued mapping
[J]. The Annals of Mathematical Statistics , 1967 , 38 (2 ):325 -339 .
DOI:10.1214/aoms/1177698950
URL
[本文引用: 1]
[8]
蒋雯 . 邓鑫洋 . D-S证据理论信息建模与应用 [M]. 北京 : 科学出版社 , 2018 .
[本文引用: 1]
Jiang W Deng X Y . D-S evidence theory information modeling and application [M]. Beijing : Science Press , 2018 .
[本文引用: 1]
[9]
[本文引用: 1]
Tong T Yang G Li X , et al . Recognition method of multi-feature fusion based on D-S evidence theory in SAR image
[J]. Remote Sensing for Land and Resources , 2013 , 25 (2 ):37 -41 .doi: 10.6046/gtzyyg.2013.02.07 .
[本文引用: 1]
[10]
[本文引用: 1]
Li H P Zhang S Q Sun Y . The quantitative evaluation of remoting sensing data for supervised evidential classification
[J]. Remote sensing for Land and Resources , 2011 , 23 (1 ):26 -32 .doi: 10.6046/gtzyyg.2011.01.05 .
[本文引用: 1]
[11]
Zhang Z Han D Dezert J , et al . A new adaptive switching median filter for impulse noise reduction with predetection based on evidential reasoning
[J]. Signal Processing , 2018 (147 ):173 -189 .
[本文引用: 4]
[12]
Ng P E Ma K . A switching median filter with boundary discriminative noise detection for extremely corrupted images
[J]. IEEE Transactions on Image Processing , 2006 , 15 (6 ):1506 -1516 .
DOI:10.1109/TIP.2005.871129
URL
[本文引用: 1]
[13]
Han D Dezert J Duan Z . Evaluation of probability transformations of belief functions fordecision making
[J]. IEEE Transactions on Systems,Man,and Cybernetics , 2016 , 46 (1 ):93 -108 .
[本文引用: 1]
[15]
钱晓亮 , 郭雷 , 余博 . 基于目标尺度的自适应高斯滤波
[J]. 计算机工程与应用 , 2010 , 46 (12 ):14 -16 .
[本文引用: 1]
Qian X L Guo L Yu B . Adaptive Gaussian filter based on object scale
[J]. Computer Engineering and Applications , 2010 , 46 (12 ):14 -16 .
[本文引用: 1]
[16]
Xiao F . Multi-sensor data fusion based on the belief divergence measure of evidencesand the belief entropy
[J]. Information Fusion , 2019 ,(46 ):23 -32 .
[本文引用: 1]
[17]
Deng Y . Deng entropy
[J]. Chaos,Solitons & Fractals , 2016 (91 ):549 -553 .
[本文引用: 1]
[18]
Jafar I F AlNa’mneh R A Darabkh K A . Efficient improvements on the BDND filtering algorithm for the removal of high-density impulse noise
[J]. IEEE Transactios on Image Processing , 2013 , 22 (3 ):1223 -1232 .
[本文引用: 1]
[19]
Zhao B Zhong Y Xia G S , et al . Dirichlet-derived multiple topic scene classification model fusing heterogeneous features for high spatial resolution remote sensing imagery
[J]. IEEE Transactions on Geoscience and Remote Sensing , 2016 , 54 (4 ):2108 -2123 .
DOI:10.1109/TGRS.2015.2496185
URL
[本文引用: 1]
[20]
Zhao B Zhong Y Zhang L , et al . The fisher kernel coding framework for high spatial resolution scene classification
[J]. Remote Sensing , 2016 , 8 (2 ):157 -176 .
DOI:10.3390/rs8020157
URL
[本文引用: 1]
[21]
Zhu Q Zhong Y Zhao B , et al . Bag-of-visual-words scene classifier with local and global features for high spatial resolution remote sensing imagery
[J]. IEEE Geoscience and Remote Sensing Letters , 2016 , 13 (6 ):747 -751 .
DOI:10.1109/LGRS.2015.2513443
URL
[本文引用: 1]
[22]
Haidi I Nicholas S P K Theam F N . Simple adaptive median filter for the removal of impulse noise from highly corrupted images
[J]. IEEE Transactions on Consumer Electronics , 2008 , 544 (4 ):1920 -1927 .
[本文引用: 1]
一种去除遥感影像混合噪声的集成BM3D方法
1
2019
... 遥感图像去噪的方法可以基于不同的理论模型,比如概率统计、偏微分方程、稀疏表示以及多尺度分析等[1 ⇓ ⇓ ⇓ ⇓ -6 ] .DBA算法[5 ] 、NSBMF[6 ] 等非线性方法是在统计的基础上添加噪声判断,而文献[2 ]提出了一种基于梯度倒数的自适应开关算法对噪声进行判断并消除.此外,为了解决遥感图像在滤波过程中丢失细节信息的问题,文献[3 ]提出使用组合滤波方法,在利用多尺度分析和中值滤波后,提取边缘信息,将提取结果再融合到消噪后的遥感影像中,以此提升细节信息.以上方法的共同特点是先对随机脉冲噪声与信号点进行分类[4 ] ,再对噪声点进行消除,那么分类的准确性会直接影响着滤波的效果. ...
一种去除遥感影像混合噪声的集成BM3D方法
1
2019
... 遥感图像去噪的方法可以基于不同的理论模型,比如概率统计、偏微分方程、稀疏表示以及多尺度分析等[1 ⇓ ⇓ ⇓ ⇓ -6 ] .DBA算法[5 ] 、NSBMF[6 ] 等非线性方法是在统计的基础上添加噪声判断,而文献[2 ]提出了一种基于梯度倒数的自适应开关算法对噪声进行判断并消除.此外,为了解决遥感图像在滤波过程中丢失细节信息的问题,文献[3 ]提出使用组合滤波方法,在利用多尺度分析和中值滤波后,提取边缘信息,将提取结果再融合到消噪后的遥感影像中,以此提升细节信息.以上方法的共同特点是先对随机脉冲噪声与信号点进行分类[4 ] ,再对噪声点进行消除,那么分类的准确性会直接影响着滤波的效果. ...
基于梯度倒数的无人机遥感图像融合滤波方法
2
2018
... 遥感图像去噪的方法可以基于不同的理论模型,比如概率统计、偏微分方程、稀疏表示以及多尺度分析等[1 ⇓ ⇓ ⇓ ⇓ -6 ] .DBA算法[5 ] 、NSBMF[6 ] 等非线性方法是在统计的基础上添加噪声判断,而文献[2 ]提出了一种基于梯度倒数的自适应开关算法对噪声进行判断并消除.此外,为了解决遥感图像在滤波过程中丢失细节信息的问题,文献[3 ]提出使用组合滤波方法,在利用多尺度分析和中值滤波后,提取边缘信息,将提取结果再融合到消噪后的遥感影像中,以此提升细节信息.以上方法的共同特点是先对随机脉冲噪声与信号点进行分类[4 ] ,再对噪声点进行消除,那么分类的准确性会直接影响着滤波的效果. ...
... 等非线性方法是在统计的基础上添加噪声判断,而文献[2 ]提出了一种基于梯度倒数的自适应开关算法对噪声进行判断并消除.此外,为了解决遥感图像在滤波过程中丢失细节信息的问题,文献[3 ]提出使用组合滤波方法,在利用多尺度分析和中值滤波后,提取边缘信息,将提取结果再融合到消噪后的遥感影像中,以此提升细节信息.以上方法的共同特点是先对随机脉冲噪声与信号点进行分类[4 ] ,再对噪声点进行消除,那么分类的准确性会直接影响着滤波的效果. ...
基于梯度倒数的无人机遥感图像融合滤波方法
2
2018
... 遥感图像去噪的方法可以基于不同的理论模型,比如概率统计、偏微分方程、稀疏表示以及多尺度分析等[1 ⇓ ⇓ ⇓ ⇓ -6 ] .DBA算法[5 ] 、NSBMF[6 ] 等非线性方法是在统计的基础上添加噪声判断,而文献[2 ]提出了一种基于梯度倒数的自适应开关算法对噪声进行判断并消除.此外,为了解决遥感图像在滤波过程中丢失细节信息的问题,文献[3 ]提出使用组合滤波方法,在利用多尺度分析和中值滤波后,提取边缘信息,将提取结果再融合到消噪后的遥感影像中,以此提升细节信息.以上方法的共同特点是先对随机脉冲噪声与信号点进行分类[4 ] ,再对噪声点进行消除,那么分类的准确性会直接影响着滤波的效果. ...
... 等非线性方法是在统计的基础上添加噪声判断,而文献[2 ]提出了一种基于梯度倒数的自适应开关算法对噪声进行判断并消除.此外,为了解决遥感图像在滤波过程中丢失细节信息的问题,文献[3 ]提出使用组合滤波方法,在利用多尺度分析和中值滤波后,提取边缘信息,将提取结果再融合到消噪后的遥感影像中,以此提升细节信息.以上方法的共同特点是先对随机脉冲噪声与信号点进行分类[4 ] ,再对噪声点进行消除,那么分类的准确性会直接影响着滤波的效果. ...
一种新的去除遥感影像混合噪声组合滤波方法
2
2017
... 遥感图像去噪的方法可以基于不同的理论模型,比如概率统计、偏微分方程、稀疏表示以及多尺度分析等[1 ⇓ ⇓ ⇓ ⇓ -6 ] .DBA算法[5 ] 、NSBMF[6 ] 等非线性方法是在统计的基础上添加噪声判断,而文献[2 ]提出了一种基于梯度倒数的自适应开关算法对噪声进行判断并消除.此外,为了解决遥感图像在滤波过程中丢失细节信息的问题,文献[3 ]提出使用组合滤波方法,在利用多尺度分析和中值滤波后,提取边缘信息,将提取结果再融合到消噪后的遥感影像中,以此提升细节信息.以上方法的共同特点是先对随机脉冲噪声与信号点进行分类[4 ] ,再对噪声点进行消除,那么分类的准确性会直接影响着滤波的效果. ...
... ]提出了一种基于梯度倒数的自适应开关算法对噪声进行判断并消除.此外,为了解决遥感图像在滤波过程中丢失细节信息的问题,文献[3 ]提出使用组合滤波方法,在利用多尺度分析和中值滤波后,提取边缘信息,将提取结果再融合到消噪后的遥感影像中,以此提升细节信息.以上方法的共同特点是先对随机脉冲噪声与信号点进行分类[4 ] ,再对噪声点进行消除,那么分类的准确性会直接影响着滤波的效果. ...
一种新的去除遥感影像混合噪声组合滤波方法
2
2017
... 遥感图像去噪的方法可以基于不同的理论模型,比如概率统计、偏微分方程、稀疏表示以及多尺度分析等[1 ⇓ ⇓ ⇓ ⇓ -6 ] .DBA算法[5 ] 、NSBMF[6 ] 等非线性方法是在统计的基础上添加噪声判断,而文献[2 ]提出了一种基于梯度倒数的自适应开关算法对噪声进行判断并消除.此外,为了解决遥感图像在滤波过程中丢失细节信息的问题,文献[3 ]提出使用组合滤波方法,在利用多尺度分析和中值滤波后,提取边缘信息,将提取结果再融合到消噪后的遥感影像中,以此提升细节信息.以上方法的共同特点是先对随机脉冲噪声与信号点进行分类[4 ] ,再对噪声点进行消除,那么分类的准确性会直接影响着滤波的效果. ...
... ]提出了一种基于梯度倒数的自适应开关算法对噪声进行判断并消除.此外,为了解决遥感图像在滤波过程中丢失细节信息的问题,文献[3 ]提出使用组合滤波方法,在利用多尺度分析和中值滤波后,提取边缘信息,将提取结果再融合到消噪后的遥感影像中,以此提升细节信息.以上方法的共同特点是先对随机脉冲噪声与信号点进行分类[4 ] ,再对噪声点进行消除,那么分类的准确性会直接影响着滤波的效果. ...
2
2016
... 遥感图像去噪的方法可以基于不同的理论模型,比如概率统计、偏微分方程、稀疏表示以及多尺度分析等[1 ⇓ ⇓ ⇓ ⇓ -6 ] .DBA算法[5 ] 、NSBMF[6 ] 等非线性方法是在统计的基础上添加噪声判断,而文献[2 ]提出了一种基于梯度倒数的自适应开关算法对噪声进行判断并消除.此外,为了解决遥感图像在滤波过程中丢失细节信息的问题,文献[3 ]提出使用组合滤波方法,在利用多尺度分析和中值滤波后,提取边缘信息,将提取结果再融合到消噪后的遥感影像中,以此提升细节信息.以上方法的共同特点是先对随机脉冲噪声与信号点进行分类[4 ] ,再对噪声点进行消除,那么分类的准确性会直接影响着滤波的效果. ...
... [4 ],再对噪声点进行消除,那么分类的准确性会直接影响着滤波的效果. ...
2
2016
... 遥感图像去噪的方法可以基于不同的理论模型,比如概率统计、偏微分方程、稀疏表示以及多尺度分析等[1 ⇓ ⇓ ⇓ ⇓ -6 ] .DBA算法[5 ] 、NSBMF[6 ] 等非线性方法是在统计的基础上添加噪声判断,而文献[2 ]提出了一种基于梯度倒数的自适应开关算法对噪声进行判断并消除.此外,为了解决遥感图像在滤波过程中丢失细节信息的问题,文献[3 ]提出使用组合滤波方法,在利用多尺度分析和中值滤波后,提取边缘信息,将提取结果再融合到消噪后的遥感影像中,以此提升细节信息.以上方法的共同特点是先对随机脉冲噪声与信号点进行分类[4 ] ,再对噪声点进行消除,那么分类的准确性会直接影响着滤波的效果. ...
... [4 ],再对噪声点进行消除,那么分类的准确性会直接影响着滤波的效果. ...
A new fast and efficient decision-based algorithm for removal of high-density impulse noises
2
2007
... 遥感图像去噪的方法可以基于不同的理论模型,比如概率统计、偏微分方程、稀疏表示以及多尺度分析等[1 ⇓ ⇓ ⇓ ⇓ -6 ] .DBA算法[5 ] 、NSBMF[6 ] 等非线性方法是在统计的基础上添加噪声判断,而文献[2 ]提出了一种基于梯度倒数的自适应开关算法对噪声进行判断并消除.此外,为了解决遥感图像在滤波过程中丢失细节信息的问题,文献[3 ]提出使用组合滤波方法,在利用多尺度分析和中值滤波后,提取边缘信息,将提取结果再融合到消噪后的遥感影像中,以此提升细节信息.以上方法的共同特点是先对随机脉冲噪声与信号点进行分类[4 ] ,再对噪声点进行消除,那么分类的准确性会直接影响着滤波的效果. ...
... [5 ]、NSBMF[6 ] 等非线性方法是在统计的基础上添加噪声判断,而文献[2 ]提出了一种基于梯度倒数的自适应开关算法对噪声进行判断并消除.此外,为了解决遥感图像在滤波过程中丢失细节信息的问题,文献[3 ]提出使用组合滤波方法,在利用多尺度分析和中值滤波后,提取边缘信息,将提取结果再融合到消噪后的遥感影像中,以此提升细节信息.以上方法的共同特点是先对随机脉冲噪声与信号点进行分类[4 ] ,再对噪声点进行消除,那么分类的准确性会直接影响着滤波的效果. ...
A new switching-based median filtering scheme and algorithmfor removal of high density salt and pepper noise in images
2
2010
... 遥感图像去噪的方法可以基于不同的理论模型,比如概率统计、偏微分方程、稀疏表示以及多尺度分析等[1 ⇓ ⇓ ⇓ ⇓ -6 ] .DBA算法[5 ] 、NSBMF[6 ] 等非线性方法是在统计的基础上添加噪声判断,而文献[2 ]提出了一种基于梯度倒数的自适应开关算法对噪声进行判断并消除.此外,为了解决遥感图像在滤波过程中丢失细节信息的问题,文献[3 ]提出使用组合滤波方法,在利用多尺度分析和中值滤波后,提取边缘信息,将提取结果再融合到消噪后的遥感影像中,以此提升细节信息.以上方法的共同特点是先对随机脉冲噪声与信号点进行分类[4 ] ,再对噪声点进行消除,那么分类的准确性会直接影响着滤波的效果. ...
... [6 ]等非线性方法是在统计的基础上添加噪声判断,而文献[2 ]提出了一种基于梯度倒数的自适应开关算法对噪声进行判断并消除.此外,为了解决遥感图像在滤波过程中丢失细节信息的问题,文献[3 ]提出使用组合滤波方法,在利用多尺度分析和中值滤波后,提取边缘信息,将提取结果再融合到消噪后的遥感影像中,以此提升细节信息.以上方法的共同特点是先对随机脉冲噪声与信号点进行分类[4 ] ,再对噪声点进行消除,那么分类的准确性会直接影响着滤波的效果. ...
Upper and lower probabilities induced by a multivalued mapping
1
1967
... 事实上这种分类问题可以视作是一种不确定性问题,因为被脉冲噪声冲击的遥感图像在某些像素点上会发生不确定性的突变,这种不确定性主要体现在突变像素强度的不确定性、突变位置的不确定性和突变数量的不确定性.D-S证据理论具有表达“不确定”和“不知道”的能力,在没有先验信息的情况下它对不确定性和非精确性进行建模有着不错的灵活性和有效性[7 ] .因此,它比一般概率理论的适用范围更加广泛,作为解决不确定性问题的有力工具,它已经被应用到许多实际领域,如目标识别、遥感分类和图像分割等[8 ⇓ -10 ] .D-S证据理论已经成为不确定性信息处理与信息融合领域的重要理论,但是很少有人将该理论与图像脉冲噪声和信号点的分类问题结合起来. ...
1
2018
... 事实上这种分类问题可以视作是一种不确定性问题,因为被脉冲噪声冲击的遥感图像在某些像素点上会发生不确定性的突变,这种不确定性主要体现在突变像素强度的不确定性、突变位置的不确定性和突变数量的不确定性.D-S证据理论具有表达“不确定”和“不知道”的能力,在没有先验信息的情况下它对不确定性和非精确性进行建模有着不错的灵活性和有效性[7 ] .因此,它比一般概率理论的适用范围更加广泛,作为解决不确定性问题的有力工具,它已经被应用到许多实际领域,如目标识别、遥感分类和图像分割等[8 ⇓ -10 ] .D-S证据理论已经成为不确定性信息处理与信息融合领域的重要理论,但是很少有人将该理论与图像脉冲噪声和信号点的分类问题结合起来. ...
1
2018
... 事实上这种分类问题可以视作是一种不确定性问题,因为被脉冲噪声冲击的遥感图像在某些像素点上会发生不确定性的突变,这种不确定性主要体现在突变像素强度的不确定性、突变位置的不确定性和突变数量的不确定性.D-S证据理论具有表达“不确定”和“不知道”的能力,在没有先验信息的情况下它对不确定性和非精确性进行建模有着不错的灵活性和有效性[7 ] .因此,它比一般概率理论的适用范围更加广泛,作为解决不确定性问题的有力工具,它已经被应用到许多实际领域,如目标识别、遥感分类和图像分割等[8 ⇓ -10 ] .D-S证据理论已经成为不确定性信息处理与信息融合领域的重要理论,但是很少有人将该理论与图像脉冲噪声和信号点的分类问题结合起来. ...
基于D-S证据理论的多特征融合SAR图像目标识别方法
1
2013
... 事实上这种分类问题可以视作是一种不确定性问题,因为被脉冲噪声冲击的遥感图像在某些像素点上会发生不确定性的突变,这种不确定性主要体现在突变像素强度的不确定性、突变位置的不确定性和突变数量的不确定性.D-S证据理论具有表达“不确定”和“不知道”的能力,在没有先验信息的情况下它对不确定性和非精确性进行建模有着不错的灵活性和有效性[7 ] .因此,它比一般概率理论的适用范围更加广泛,作为解决不确定性问题的有力工具,它已经被应用到许多实际领域,如目标识别、遥感分类和图像分割等[8 ⇓ -10 ] .D-S证据理论已经成为不确定性信息处理与信息融合领域的重要理论,但是很少有人将该理论与图像脉冲噪声和信号点的分类问题结合起来. ...
基于D-S证据理论的多特征融合SAR图像目标识别方法
1
2013
... 事实上这种分类问题可以视作是一种不确定性问题,因为被脉冲噪声冲击的遥感图像在某些像素点上会发生不确定性的突变,这种不确定性主要体现在突变像素强度的不确定性、突变位置的不确定性和突变数量的不确定性.D-S证据理论具有表达“不确定”和“不知道”的能力,在没有先验信息的情况下它对不确定性和非精确性进行建模有着不错的灵活性和有效性[7 ] .因此,它比一般概率理论的适用范围更加广泛,作为解决不确定性问题的有力工具,它已经被应用到许多实际领域,如目标识别、遥感分类和图像分割等[8 ⇓ -10 ] .D-S证据理论已经成为不确定性信息处理与信息融合领域的重要理论,但是很少有人将该理论与图像脉冲噪声和信号点的分类问题结合起来. ...
证据理论结合遥感分类数据能力定量评价研究
1
2011
... 事实上这种分类问题可以视作是一种不确定性问题,因为被脉冲噪声冲击的遥感图像在某些像素点上会发生不确定性的突变,这种不确定性主要体现在突变像素强度的不确定性、突变位置的不确定性和突变数量的不确定性.D-S证据理论具有表达“不确定”和“不知道”的能力,在没有先验信息的情况下它对不确定性和非精确性进行建模有着不错的灵活性和有效性[7 ] .因此,它比一般概率理论的适用范围更加广泛,作为解决不确定性问题的有力工具,它已经被应用到许多实际领域,如目标识别、遥感分类和图像分割等[8 ⇓ -10 ] .D-S证据理论已经成为不确定性信息处理与信息融合领域的重要理论,但是很少有人将该理论与图像脉冲噪声和信号点的分类问题结合起来. ...
证据理论结合遥感分类数据能力定量评价研究
1
2011
... 事实上这种分类问题可以视作是一种不确定性问题,因为被脉冲噪声冲击的遥感图像在某些像素点上会发生不确定性的突变,这种不确定性主要体现在突变像素强度的不确定性、突变位置的不确定性和突变数量的不确定性.D-S证据理论具有表达“不确定”和“不知道”的能力,在没有先验信息的情况下它对不确定性和非精确性进行建模有着不错的灵活性和有效性[7 ] .因此,它比一般概率理论的适用范围更加广泛,作为解决不确定性问题的有力工具,它已经被应用到许多实际领域,如目标识别、遥感分类和图像分割等[8 ⇓ -10 ] .D-S证据理论已经成为不确定性信息处理与信息融合领域的重要理论,但是很少有人将该理论与图像脉冲噪声和信号点的分类问题结合起来. ...
A new adaptive switching median filter for impulse noise reduction with predetection based on evidential reasoning
4
2018
... 直到2018年Zhang等[11 ] 提出了ASMF-DBER算法,同时考虑脉冲噪声间断特征和极值特征2种准则进行了不确定性建模,创新性地将D-S证据理论应用到了噪声与信号的分类上,并取得了不错的结果.但是在证据高度冲突的情况下,仅使用2个特征和冲突系数无法准确显示融合的效果.比如,在脉冲噪声密度较高时,图像由于受到大量脉冲噪声的冲击而遭到严重损坏,ASMF-DBER算法中的2个特征准则融合后的结果出现了违背直觉或者难以分类的情况,本文考虑添加第3种特征来降低遥感图像中出现的证据高度冲突发生的可能性.所谓“高度冲突”的情况在本文中主要表现为以下几种情况: 一是遥感图像脉冲噪声密度过大; 二是待分类的像素处在遥感图像的边缘位置或者处在图像明暗区域的交界处; 三是待分类的像素恰好体现遥感图像的细节信息.一直以来这些情况下的噪声消除都是难以解决的. ...
... 式中: d c I d 0 I d e x t 为 I I m i n I m a x ) 的距离; d m e d 为 I I m 1 ( N ) 11 ]中 m 1 ( N ) 11 ]的 m 1 ε ( 取 ε = 0.001 ) 去调整BPA函数,避免了这种情形下的高度冲突结果的发生. ...
... 趋近于0,这样就导致了噪声点被判断成信号的错误分类结果,本文将文献[11 ]的 m 1 ε ( 取 ε = 0.001 ) 去调整BPA函数,避免了这种情形下的高度冲突结果的发生. ...
... 脉冲噪声的存在极大影响着遥感图像的信息判读与分析,为了实现对遥感图像的高质量复原,扩展遥感图像的应用范围和应用价值,本文提出了多特征准则融合的脉冲噪声识别方法.在文献[11 ]的基础上,本文增加了脉冲噪声的相似性特征,根据脉冲噪声的相似性、极值性和间断性特征进行了新的不确定性建模; 同时利用BJS散度和信度熵对证据进行了新的权重分配,根据D-S证据理论进行了证据融合,避免冲突信息的发生.通过实验得到以下结论: ...
A switching median filter with boundary discriminative noise detection for extremely corrupted images
1
2006
... 为了描述脉冲噪声的不确定性,本文选择文献[12 ]中的噪声模型,当图像(以8位灰色图像为研究对象)被脉冲噪声破坏后,噪声随机出现在像素集合 N 1 = { 0,1 , 2 , … , l } N 2 = { 255 - l , 255 - ( l - 1 ) , … , 255 }
Evaluation of probability transformations of belief functions fordecision making
1
2016
... 概率转换函数[13 ] 是指假设 m ( A ) Θ B e t p
Dynamic clustering of interval data using a wasserstein based distance
1
2008
... 由噪声模型可以看出,脉冲噪声像素的强度主要分布在0或者255附近,接近或者达到极值.为了将噪声和信号点进行分类,本文利用区间距离来描述像素的强度和极值之间的接近程度,定义为[14 ] : ...
基于目标尺度的自适应高斯滤波
1
2010
... 式中: rg (xi , j g = 1,2 , … , W F × W F x i , j ( i , j ) x i - s , j - t ( i - s , j - t ) SIMij 为 x i , j [15 ] ,公式为: ...
基于目标尺度的自适应高斯滤波
1
2010
... 式中: rg (xi , j g = 1,2 , … , W F × W F x i , j ( i , j ) x i - s , j - t ( i - s , j - t ) SIMij 为 x i , j [15 ] ,公式为: ...
Multi-sensor data fusion based on the belief divergence measure of evidencesand the belief entropy
1
2019
... 若 A i m m 1 m 2 Θ m 1 m 2 [16 ] 可表示为: ...
Deng entropy
1
2016
... 式中 E d = - ∑ i m ( A i ) l o g m ( A i ) 2 A i - 1 , i = 1,2 , … , M A i [17 ] . ...
Efficient improvements on the BDND filtering algorithm for the removal of high-density impulse noise
1
2013
... 本文算法采用先对脉冲噪声与信号分类,再进行噪声消除的思路,提出了基于IBDND[18 ] 的消噪改进方法,步骤如下: ...
Dirichlet-derived multiple topic scene classification model fusing heterogeneous features for high spatial resolution remote sensing imagery
1
2016
... 为了验证本文算法的有效性,文章从SIRI-WHU遥感影像中的公园、住宅区、工业区、和河坝等数据库[19 ⇓ -21 ] 里随机选取了6幅含有不同类型地物信息的遥感图像(见图4 )进行实验.这些图像具有区域平滑、色调对比明显或者背景复杂、纹理信息丰富等不同特征.采用的不确定性噪声模型见式(1).为说明算法的优势,本文还与DBA,NSBMF,IBDND,SAMF[22 ] 以及ASMF-DBER这5种算法进行了比较.实验主要从“高冲突”角度出发,对高噪声密度、边缘、纹理细节等情况进行视觉分析和定量分析.定量指标选择常用的结构相似度(structural similarity index,SSIM)、准确率(accuracy rate,AR)和峰值信噪比(peak signal to noise ratio,PSNR),指标公式如下: ...
The fisher kernel coding framework for high spatial resolution scene classification
1
2016
... 为了验证本文算法的有效性,文章从SIRI-WHU遥感影像中的公园、住宅区、工业区、和河坝等数据库[19 ⇓ -21 ] 里随机选取了6幅含有不同类型地物信息的遥感图像(见图4 )进行实验.这些图像具有区域平滑、色调对比明显或者背景复杂、纹理信息丰富等不同特征.采用的不确定性噪声模型见式(1).为说明算法的优势,本文还与DBA,NSBMF,IBDND,SAMF[22 ] 以及ASMF-DBER这5种算法进行了比较.实验主要从“高冲突”角度出发,对高噪声密度、边缘、纹理细节等情况进行视觉分析和定量分析.定量指标选择常用的结构相似度(structural similarity index,SSIM)、准确率(accuracy rate,AR)和峰值信噪比(peak signal to noise ratio,PSNR),指标公式如下: ...
Bag-of-visual-words scene classifier with local and global features for high spatial resolution remote sensing imagery
1
2016
... 为了验证本文算法的有效性,文章从SIRI-WHU遥感影像中的公园、住宅区、工业区、和河坝等数据库[19 ⇓ -21 ] 里随机选取了6幅含有不同类型地物信息的遥感图像(见图4 )进行实验.这些图像具有区域平滑、色调对比明显或者背景复杂、纹理信息丰富等不同特征.采用的不确定性噪声模型见式(1).为说明算法的优势,本文还与DBA,NSBMF,IBDND,SAMF[22 ] 以及ASMF-DBER这5种算法进行了比较.实验主要从“高冲突”角度出发,对高噪声密度、边缘、纹理细节等情况进行视觉分析和定量分析.定量指标选择常用的结构相似度(structural similarity index,SSIM)、准确率(accuracy rate,AR)和峰值信噪比(peak signal to noise ratio,PSNR),指标公式如下: ...
Simple adaptive median filter for the removal of impulse noise from highly corrupted images
1
2008
... 为了验证本文算法的有效性,文章从SIRI-WHU遥感影像中的公园、住宅区、工业区、和河坝等数据库[19 ⇓ -21 ] 里随机选取了6幅含有不同类型地物信息的遥感图像(见图4 )进行实验.这些图像具有区域平滑、色调对比明显或者背景复杂、纹理信息丰富等不同特征.采用的不确定性噪声模型见式(1).为说明算法的优势,本文还与DBA,NSBMF,IBDND,SAMF[22 ] 以及ASMF-DBER这5种算法进行了比较.实验主要从“高冲突”角度出发,对高噪声密度、边缘、纹理细节等情况进行视觉分析和定量分析.定量指标选择常用的结构相似度(structural similarity index,SSIM)、准确率(accuracy rate,AR)和峰值信噪比(peak signal to noise ratio,PSNR),指标公式如下: ...





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}