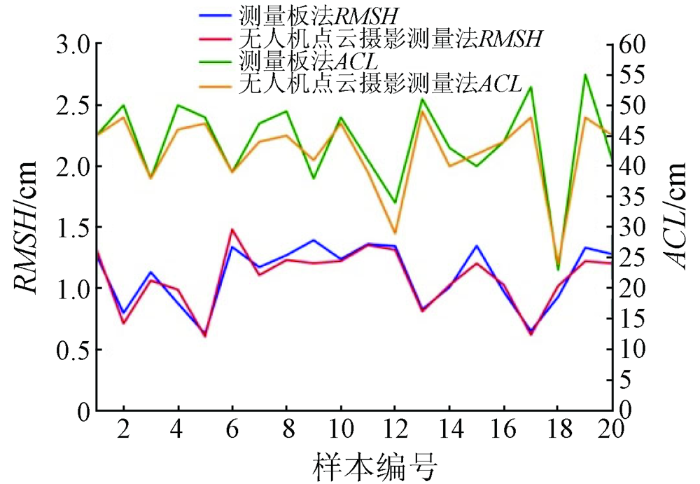
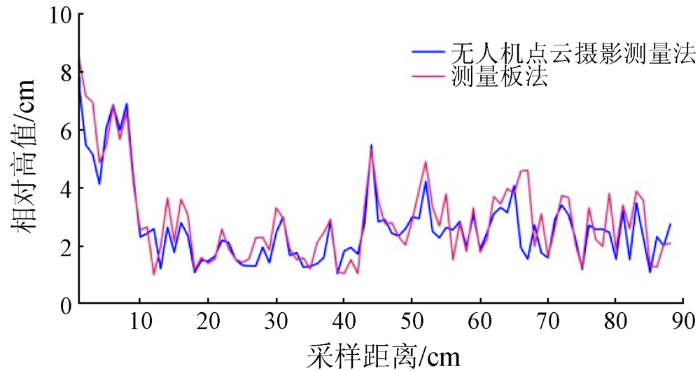
The soil roughness of cultivated land is an important element affecting the monitoring of agricultural information, such as soil moisture, microwave remote sensing observation, and plant growth. Soil roughness is generally interpreted according to field photos. However, such interpretation suffers some shortcomings such as low efficiency and anthropogenic effects on processing results. UAV low-altitude remote sensing is sensitive to surface relief. To explore the precision of the soil roughness determined using UAV data, this study employed UAV photogrammetry to photograph the surface and then compared the photogrammetry results with the data obtained using a gauging plate for soil roughness. The results show that the close-range photogrammetry had mean absolute errors of mainly 0.4~1.2 cm, a mean relative error of 6.16%, and a root mean square error of 0.40 cm. Therefore, UAV-based point cloud photogrammetry could be effectively applied to the measurement of surface roughness, and a smaller sampling area is associated with more accurate soil roughness.
Keywords:soil roughness;
point cloud data;
close-range photogrammetry;
three-dimensional modeling
ZHANG Tian, ZHOU Zhongfa, WANG Lingyu, ZHAO Xin, ZHANG Wenhui, ZHANG Shu, WANG Yu. A method for soil roughness measurement based on UAV point cloud data[J]. Remote Sensing for Land & Resources, 2023, 35(1): 115-122 doi:10.6046/zrzyyg.2021461
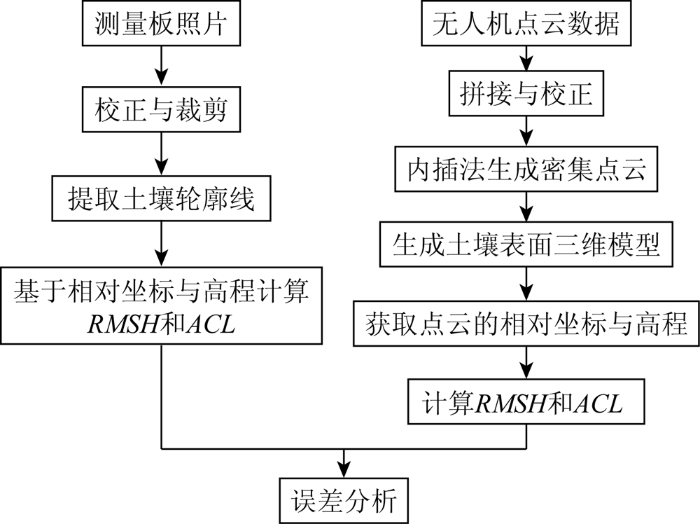
三维重建的原理主要是实现点云的网格化处理[27],其采用的算法是运动恢复结构(structure from motion,SFM)算法,SFM算法直接将摄影测量与计算机视角算法相结合,对不同距离、不同视角的重叠影像自动提取影像特征并进行匹配[28],该算法在影像的重叠部分自动检测影像特征点(即几何相似性),并检测这些特征点在多幅影像序列中的运动特征和相机参数,在保证影像的连续性和拍摄时间间隔较短的前提下,基于每张影像的位置、方向、焦距和特征点的运动规律就可以从多幅影像中的二维坐标计算任意位置的三维坐标,从而校正影像并创建点云; 另一方面,当相机参数未知时,可以从不同影像中获取等值点的二维坐标导出其在空间中的三维坐标[29⇓⇓-32]。因此,在满足影像重叠率、地面分辨率和连续性的条件下,无需地面控制点,基于无人机在拍摄影像时写入的全球定位系统(global positioning system,GPS)方位和位置姿态系统(position and orientation system,POS)信息可生成高精度的密集点云。
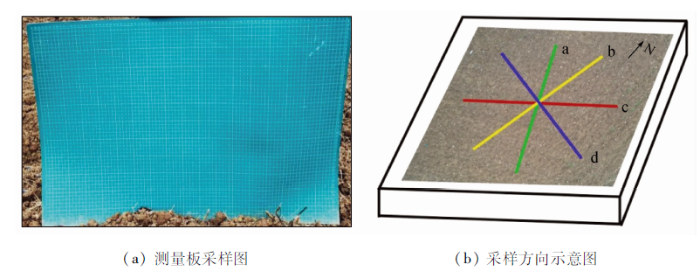
土壤表面起伏度的发生和演变是一个随机分布的过程,即其统计量不随空间尺度的变化而变化。因此,一般是利用其统计特性表征其土壤粗糙度[33],包括均方根高度(root mean square height,RMSH)和自相关长度(autocorrelation length,ACL),二者分别在垂直和水平2个方向上对土壤粗糙度的大小进行描述[34],RMSH反映了土壤的平均高度偏离的程度,描述的是随机过程中在垂直方向上各个点之间相互独立的特征。而ACL描述了土壤的高度在水平方向上的变化,反映的是地表高度在水平方向上的关联性。
XuY L.Roughness retrieval and topographic correction based on bare surface radiative transfer model[D]. Beijing: China University of Geosciences(Beijing), 2009:45-53.
. Quantification of soil roughness, i.e. the irregularities of the soil surface due to soil texture, aggregates, rock fragments and land management, is important as it affects surface storage, infiltration, overland flow, and ultimately sediment detachment and erosion. Roughness has been measured in the field using both contact methods (such as roller chain and pinboard) and sensor methods (such as stereophotogrammetry and terrestrial laser scanning (TLS)). A novel depth-sensing technique, originating in the gaming industry, has recently become available for earth sciences: the Xtion Pro method. Roughness data obtained using various methods are assumed to be similar; this assumption is tested in this study by comparing five different methods to measure roughness in the field on 1 m2 agricultural plots with different management (ploughing, harrowing, forest and direct seeding on stubble) in southern Norway. Subsequently, the values were used as input for the LISEM soil erosion model to test their effect on the simulated hydrograph at catchment scale. Results show that statistically significant differences between the methods were obtained only for the fields with direct seeding on stubble; for the other land management types the methods were in agreement. The spatial resolution of the contact methods was much lower than for the sensor methods (10 000 versus at least 57 000 points per square metre). In terms of costs and ease of use in the field, the Xtion Pro method is promising. Results from the LISEM model indicate that especially the roller chain overestimated the random roughness (RR) values and the model subsequently calculated less surface runoff than measured. In conclusion, the choice of measurement method for roughness data matters and depends on the required accuracy, resolution, mobility in the field and available budget. It is recommended to use only one method within one study.\n
Riegler-NurscherP, MoitziG, PranklJ, et al.
Machine vision for soil roughness measurement and control of tillage machines during seedbed preparation
XuY H.The application of low-altitude drone thchnology in the production of large scale DLG in Guizhou mountain area[D]. Guiyang: Guizhou Normal University, 2018:1-8.
为准确快速获取喀斯特石漠化地区植被和植被覆盖度信息,本研究利用四旋翼无人机采集喀斯特石漠化区域的可见光影像,选择过绿指数(EXG,excess green)、可见光波段差异植被指数(VDVI,visible-band difference vegetation indx)、红绿蓝植被指数(RGBRI,red green and blue vegetation index)、过绿减过红指数(ExG-ExR,excess green-excess red),利用植被指数时序图交点法和样本统计法思想,运用阈值分割法进行植被和植被覆盖度的信息提取,并以监督分类得到的植被和植被覆盖度信息为真实值,进行精度验证。结果表明,在贵州省关岭贞丰花江喀斯特石漠化地区,对于植被信息提取,ExG-ExR的精度最高,总体精度为95.56%,Kappa系数为0.919;ExG-ExR得到的植被覆盖度精度最好,为99.174%,均方根误差RMSE为0.097,R<sup>2</sup>为0.977。由此可见,在喀斯特地区利用植被指数时序图交点法和样本统计法思想,适合该地区的植被信息提取和植被覆盖度的提取,具有较高的精度。
YinL J, ZhouZ F, LiS H, et al.
Research on vegetation extraction and fractional vegetation cover of Karst area based on visible light image of UAV
Building a virtual outcrop,extracting geological information from it,and sharing the results in Google Earth via OpenPlot and Photoscan:An example from the Khaviz Anticline (Iran)
LeiZ B.Research on soil moisture retrieval of crop covering area based on GaoFen3 Radar data[D]. Beijing: China University of Geosciences(Beijing), 2020:18-20.
... 三维重建的原理主要是实现点云的网格化处理[27],其采用的算法是运动恢复结构(structure from motion,SFM)算法,SFM算法直接将摄影测量与计算机视角算法相结合,对不同距离、不同视角的重叠影像自动提取影像特征并进行匹配[28],该算法在影像的重叠部分自动检测影像特征点(即几何相似性),并检测这些特征点在多幅影像序列中的运动特征和相机参数,在保证影像的连续性和拍摄时间间隔较短的前提下,基于每张影像的位置、方向、焦距和特征点的运动规律就可以从多幅影像中的二维坐标计算任意位置的三维坐标,从而校正影像并创建点云; 另一方面,当相机参数未知时,可以从不同影像中获取等值点的二维坐标导出其在空间中的三维坐标[29⇓⇓-32].因此,在满足影像重叠率、地面分辨率和连续性的条件下,无需地面控制点,基于无人机在拍摄影像时写入的全球定位系统(global positioning system,GPS)方位和位置姿态系统(position and orientation system,POS)信息可生成高精度的密集点云. ...
基于线结构激光传感器的土壤表面粗糙度测量方法研究
1
2019
... 三维重建的原理主要是实现点云的网格化处理[27],其采用的算法是运动恢复结构(structure from motion,SFM)算法,SFM算法直接将摄影测量与计算机视角算法相结合,对不同距离、不同视角的重叠影像自动提取影像特征并进行匹配[28],该算法在影像的重叠部分自动检测影像特征点(即几何相似性),并检测这些特征点在多幅影像序列中的运动特征和相机参数,在保证影像的连续性和拍摄时间间隔较短的前提下,基于每张影像的位置、方向、焦距和特征点的运动规律就可以从多幅影像中的二维坐标计算任意位置的三维坐标,从而校正影像并创建点云; 另一方面,当相机参数未知时,可以从不同影像中获取等值点的二维坐标导出其在空间中的三维坐标[29⇓⇓-32].因此,在满足影像重叠率、地面分辨率和连续性的条件下,无需地面控制点,基于无人机在拍摄影像时写入的全球定位系统(global positioning system,GPS)方位和位置姿态系统(position and orientation system,POS)信息可生成高精度的密集点云. ...
无人机数字摄影测量与激光雷达在地形地貌与地表覆盖研究中的应用及比较
1
2018
... 三维重建的原理主要是实现点云的网格化处理[27],其采用的算法是运动恢复结构(structure from motion,SFM)算法,SFM算法直接将摄影测量与计算机视角算法相结合,对不同距离、不同视角的重叠影像自动提取影像特征并进行匹配[28],该算法在影像的重叠部分自动检测影像特征点(即几何相似性),并检测这些特征点在多幅影像序列中的运动特征和相机参数,在保证影像的连续性和拍摄时间间隔较短的前提下,基于每张影像的位置、方向、焦距和特征点的运动规律就可以从多幅影像中的二维坐标计算任意位置的三维坐标,从而校正影像并创建点云; 另一方面,当相机参数未知时,可以从不同影像中获取等值点的二维坐标导出其在空间中的三维坐标[29⇓⇓-32].因此,在满足影像重叠率、地面分辨率和连续性的条件下,无需地面控制点,基于无人机在拍摄影像时写入的全球定位系统(global positioning system,GPS)方位和位置姿态系统(position and orientation system,POS)信息可生成高精度的密集点云. ...
无人机数字摄影测量与激光雷达在地形地貌与地表覆盖研究中的应用及比较
1
2018
... 三维重建的原理主要是实现点云的网格化处理[27],其采用的算法是运动恢复结构(structure from motion,SFM)算法,SFM算法直接将摄影测量与计算机视角算法相结合,对不同距离、不同视角的重叠影像自动提取影像特征并进行匹配[28],该算法在影像的重叠部分自动检测影像特征点(即几何相似性),并检测这些特征点在多幅影像序列中的运动特征和相机参数,在保证影像的连续性和拍摄时间间隔较短的前提下,基于每张影像的位置、方向、焦距和特征点的运动规律就可以从多幅影像中的二维坐标计算任意位置的三维坐标,从而校正影像并创建点云; 另一方面,当相机参数未知时,可以从不同影像中获取等值点的二维坐标导出其在空间中的三维坐标[29⇓⇓-32].因此,在满足影像重叠率、地面分辨率和连续性的条件下,无需地面控制点,基于无人机在拍摄影像时写入的全球定位系统(global positioning system,GPS)方位和位置姿态系统(position and orientation system,POS)信息可生成高精度的密集点云. ...
Taking computer vision aloft-archaeological three-dimensional reconstructions from aerial photographs with PhotoScan
1
2011
... 三维重建的原理主要是实现点云的网格化处理[27],其采用的算法是运动恢复结构(structure from motion,SFM)算法,SFM算法直接将摄影测量与计算机视角算法相结合,对不同距离、不同视角的重叠影像自动提取影像特征并进行匹配[28],该算法在影像的重叠部分自动检测影像特征点(即几何相似性),并检测这些特征点在多幅影像序列中的运动特征和相机参数,在保证影像的连续性和拍摄时间间隔较短的前提下,基于每张影像的位置、方向、焦距和特征点的运动规律就可以从多幅影像中的二维坐标计算任意位置的三维坐标,从而校正影像并创建点云; 另一方面,当相机参数未知时,可以从不同影像中获取等值点的二维坐标导出其在空间中的三维坐标[29⇓⇓-32].因此,在满足影像重叠率、地面分辨率和连续性的条件下,无需地面控制点,基于无人机在拍摄影像时写入的全球定位系统(global positioning system,GPS)方位和位置姿态系统(position and orientation system,POS)信息可生成高精度的密集点云. ...
Image-based 3D modelling:A review
1
2010
... 三维重建的原理主要是实现点云的网格化处理[27],其采用的算法是运动恢复结构(structure from motion,SFM)算法,SFM算法直接将摄影测量与计算机视角算法相结合,对不同距离、不同视角的重叠影像自动提取影像特征并进行匹配[28],该算法在影像的重叠部分自动检测影像特征点(即几何相似性),并检测这些特征点在多幅影像序列中的运动特征和相机参数,在保证影像的连续性和拍摄时间间隔较短的前提下,基于每张影像的位置、方向、焦距和特征点的运动规律就可以从多幅影像中的二维坐标计算任意位置的三维坐标,从而校正影像并创建点云; 另一方面,当相机参数未知时,可以从不同影像中获取等值点的二维坐标导出其在空间中的三维坐标[29⇓⇓-32].因此,在满足影像重叠率、地面分辨率和连续性的条件下,无需地面控制点,基于无人机在拍摄影像时写入的全球定位系统(global positioning system,GPS)方位和位置姿态系统(position and orientation system,POS)信息可生成高精度的密集点云. ...
Building a virtual outcrop,extracting geological information from it,and sharing the results in Google Earth via OpenPlot and Photoscan:An example from the Khaviz Anticline (Iran)
1
2014
... 三维重建的原理主要是实现点云的网格化处理[27],其采用的算法是运动恢复结构(structure from motion,SFM)算法,SFM算法直接将摄影测量与计算机视角算法相结合,对不同距离、不同视角的重叠影像自动提取影像特征并进行匹配[28],该算法在影像的重叠部分自动检测影像特征点(即几何相似性),并检测这些特征点在多幅影像序列中的运动特征和相机参数,在保证影像的连续性和拍摄时间间隔较短的前提下,基于每张影像的位置、方向、焦距和特征点的运动规律就可以从多幅影像中的二维坐标计算任意位置的三维坐标,从而校正影像并创建点云; 另一方面,当相机参数未知时,可以从不同影像中获取等值点的二维坐标导出其在空间中的三维坐标[29⇓⇓-32].因此,在满足影像重叠率、地面分辨率和连续性的条件下,无需地面控制点,基于无人机在拍摄影像时写入的全球定位系统(global positioning system,GPS)方位和位置姿态系统(position and orientation system,POS)信息可生成高精度的密集点云. ...
基于无人机影像的山地人工林景观DEM构建
1
2015
... 三维重建的原理主要是实现点云的网格化处理[27],其采用的算法是运动恢复结构(structure from motion,SFM)算法,SFM算法直接将摄影测量与计算机视角算法相结合,对不同距离、不同视角的重叠影像自动提取影像特征并进行匹配[28],该算法在影像的重叠部分自动检测影像特征点(即几何相似性),并检测这些特征点在多幅影像序列中的运动特征和相机参数,在保证影像的连续性和拍摄时间间隔较短的前提下,基于每张影像的位置、方向、焦距和特征点的运动规律就可以从多幅影像中的二维坐标计算任意位置的三维坐标,从而校正影像并创建点云; 另一方面,当相机参数未知时,可以从不同影像中获取等值点的二维坐标导出其在空间中的三维坐标[29⇓⇓-32].因此,在满足影像重叠率、地面分辨率和连续性的条件下,无需地面控制点,基于无人机在拍摄影像时写入的全球定位系统(global positioning system,GPS)方位和位置姿态系统(position and orientation system,POS)信息可生成高精度的密集点云. ...
基于无人机影像的山地人工林景观DEM构建
1
2015
... 三维重建的原理主要是实现点云的网格化处理[27],其采用的算法是运动恢复结构(structure from motion,SFM)算法,SFM算法直接将摄影测量与计算机视角算法相结合,对不同距离、不同视角的重叠影像自动提取影像特征并进行匹配[28],该算法在影像的重叠部分自动检测影像特征点(即几何相似性),并检测这些特征点在多幅影像序列中的运动特征和相机参数,在保证影像的连续性和拍摄时间间隔较短的前提下,基于每张影像的位置、方向、焦距和特征点的运动规律就可以从多幅影像中的二维坐标计算任意位置的三维坐标,从而校正影像并创建点云; 另一方面,当相机参数未知时,可以从不同影像中获取等值点的二维坐标导出其在空间中的三维坐标[29⇓⇓-32].因此,在满足影像重叠率、地面分辨率和连续性的条件下,无需地面控制点,基于无人机在拍摄影像时写入的全球定位系统(global positioning system,GPS)方位和位置姿态系统(position and orientation system,POS)信息可生成高精度的密集点云. ...
基于图像处理的土壤表面粗糙度测量实验研究
1
2019
... 土壤表面起伏度的发生和演变是一个随机分布的过程,即其统计量不随空间尺度的变化而变化.因此,一般是利用其统计特性表征其土壤粗糙度[33],包括均方根高度(root mean square height,RMSH)和自相关长度(autocorrelation length,ACL),二者分别在垂直和水平2个方向上对土壤粗糙度的大小进行描述[34],RMSH反映了土壤的平均高度偏离的程度,描述的是随机过程中在垂直方向上各个点之间相互独立的特征.而ACL描述了土壤的高度在水平方向上的变化,反映的是地表高度在水平方向上的关联性. ...
基于图像处理的土壤表面粗糙度测量实验研究
1
2019
... 土壤表面起伏度的发生和演变是一个随机分布的过程,即其统计量不随空间尺度的变化而变化.因此,一般是利用其统计特性表征其土壤粗糙度[33],包括均方根高度(root mean square height,RMSH)和自相关长度(autocorrelation length,ACL),二者分别在垂直和水平2个方向上对土壤粗糙度的大小进行描述[34],RMSH反映了土壤的平均高度偏离的程度,描述的是随机过程中在垂直方向上各个点之间相互独立的特征.而ACL描述了土壤的高度在水平方向上的变化,反映的是地表高度在水平方向上的关联性. ...
基于激光雷达的农业耕作微地貌测量装置设计与实验
1
2019
... 土壤表面起伏度的发生和演变是一个随机分布的过程,即其统计量不随空间尺度的变化而变化.因此,一般是利用其统计特性表征其土壤粗糙度[33],包括均方根高度(root mean square height,RMSH)和自相关长度(autocorrelation length,ACL),二者分别在垂直和水平2个方向上对土壤粗糙度的大小进行描述[34],RMSH反映了土壤的平均高度偏离的程度,描述的是随机过程中在垂直方向上各个点之间相互独立的特征.而ACL描述了土壤的高度在水平方向上的变化,反映的是地表高度在水平方向上的关联性. ...
基于激光雷达的农业耕作微地貌测量装置设计与实验
1
2019
... 土壤表面起伏度的发生和演变是一个随机分布的过程,即其统计量不随空间尺度的变化而变化.因此,一般是利用其统计特性表征其土壤粗糙度[33],包括均方根高度(root mean square height,RMSH)和自相关长度(autocorrelation length,ACL),二者分别在垂直和水平2个方向上对土壤粗糙度的大小进行描述[34],RMSH反映了土壤的平均高度偏离的程度,描述的是随机过程中在垂直方向上各个点之间相互独立的特征.而ACL描述了土壤的高度在水平方向上的变化,反映的是地表高度在水平方向上的关联性. ...







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}