

0 引言
随着人类活动范围不断扩大,水域尤其是近岸区的开发逐渐被世界各国关注,掌握近岸水深及水下地形具有重要意义。近岸浅水区通常是礁石、淤泥等复杂环境,开展作业时效率低、难度大、危险性高,故浅水区长期存在大量测深数据空白。当前,测深技术主要分为声学和光学2类。声学测深主要包括船载声呐单波束和多波束技术[1-2],由于发射角限制,船载声呐在浅水区测深效率低且面临搁浅风险。被动光学测深技术主要有卫星遥感反演和双介质摄影测量[3⇓-5],卫星遥感反演可大范围测量水深,但测量精度较低; 双介质摄影测量精度不高且缺乏对星载立体影像浅水测深的系统性理论和实践案例。机载激光测深技术利用蓝绿光(波长为470~580 nm)在水体中衰减系数较小的特性进行浅水区域水下地形测量,具有测量精度高、安全性高、效率高和可进行水陆一体化测量等优点,为浅水区域数据不完善等问题提供了新的解决方案,可作为声学测深在浅水区域测量的有效补充。
迄今为止,机载激光测深系统已经过几十年更新换代。1968年,美国Hickman和Hog制造了世界上第一台激光海水深度测量系统,后续NASA成功研制了机载激光水深测量器(airborne LiDAR bathymetry,ALB),后又推出了具有高速数据记录能力和扫描功能的机载海洋激光雷达系统(airborne oceanographic LiDAR,AOL)[6-7]。20世纪80年代后,机载激光测深系统的高速数据记录能力和扫描功能更加完善,定位定姿等技术也融入其中,出现了Hawk Eye系列和LADS系列等代表产品[8⇓-10]。21世纪,机载激光测深系统迈入商业化阶段,世界上实力较强的厂商有美国Velodyne LiDAR、瑞典Hexagon AB、奥地利Riegl和加拿大Teledyn Optech等。国内于20世纪90年代开展相关研究,中国科学院上海光学精密机械研究所先后研发了三代机载测深系统,第三代Mapper5000双频系统已顺利完成南海实验。此外,海军测绘研究所、自然资源部第一海洋研究所、桂林理工大学、深圳大学和山东科技大学等单位也开展了机载激光测深设备研制工作[8⇓-10]。2017年,中国自然资源航空物探遥感中心采购了CZMIL Nova II系统,并开展实验分析了此系统在我国海岸带区域的应用潜力[11]。2020年末,国家标准化管理委员会与国家市场监督管理总局联合发布了《机载激光雷达水下地形测量技术规范》(GB/T 39624—2020)[12],进一步规范了作业标准。
由于知识产权保护及技术封锁等原因,国内的机载激光测深系统研制依旧处于试验研究阶段,许多核心技术都未彻底攻克。同时,相比快速发展的硬件系统,机载激光测深数据获取及处理的过程还存在诸多难题。因此,本文对机载激光测深技术进行了较为完整的综述,首先简要介绍了机载激光测深的系统组成和测深原理,然后对数据获取和数据处理进行了系统阐述和深入分析,并在此基础上总结了机载激光测深存在的技术难点及未来的发展趋势。
1 机载激光测深技术
1.1 机载激光测深系统
图1

图1
机载激光测深系统示意图
Fig.1
Schematic diagram of the airborne LiDAR bathymetry system
激光扫描系统包括激光测距单元和扫描器,激光测距单元(激光发射器和接收器)确定距离、回波等信息,扫描器确定激光发射方向,其扫描方式主要有圆形、椭圆形和直线式扫描[14]。POS包括全球导航卫星系统(global navigation satellite system,GNSS)和惯性导航系统(inertial navigation system,INS),GNSS提供实时、全天候和全球性的导航定位服务,INS用来测定激光发射时刻激光扫描仪的俯仰角、侧滚角及航向角等姿态信息。控制系统负责协调各部件工作,使其保持高精度的时间同步,确保系统正常运行。数据存储单元用来保存各类数据,包括位置、姿态、时间、回波次数及回波强度等。
1.2 机载激光测深原理
式中: D为测得的水深; c为蓝绿光在空气中传播速度;
图2
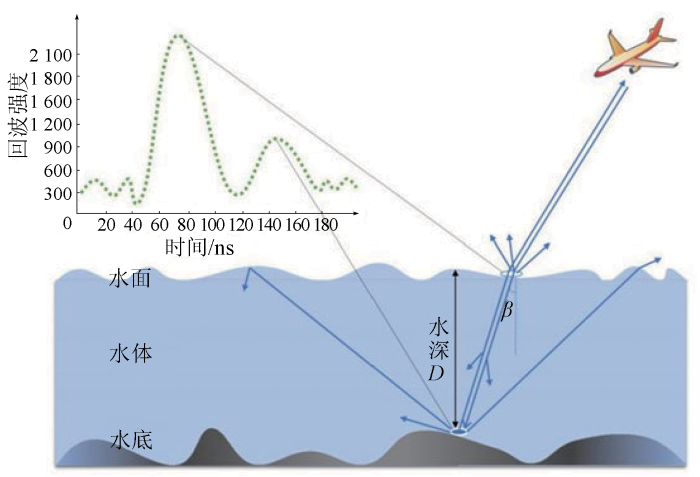
图2
单频机载激光测深原理示意图
Fig.2
Schematic diagram of the principle of single-wavelength airborne LiDAR bathymetry
2 机载激光测深数据获取
水下地形的数据获取比陆地更为复杂,涉及到设备、大气、水文环境和水底底质等多种影响,具备测量条件后方可开展机载激光测深数据采集的系列工作。
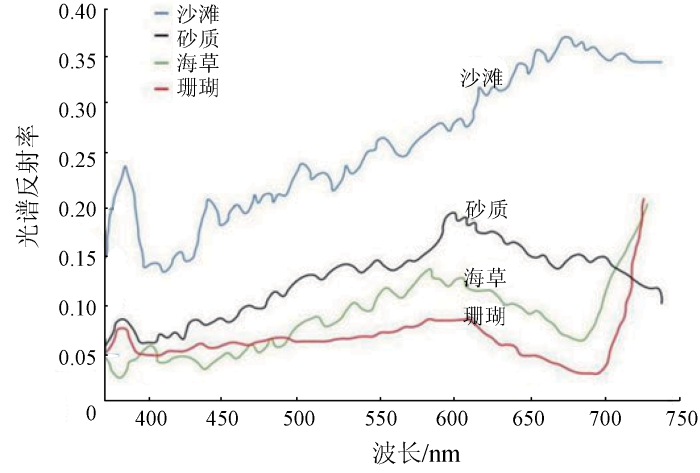
2.1 影响因素
图3
2.2 数据采集
采集数据前应制定合理的项目规划并做好相应准备,在获得航飞数据后及时检查数据(图4)。
图4
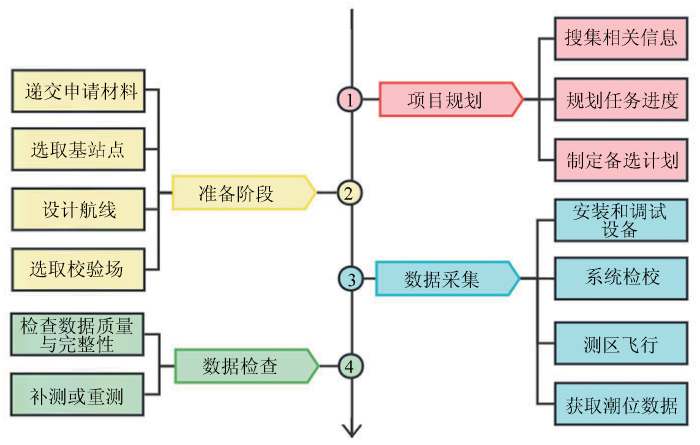
项目规划需搜集目标区域的天气、气候、经纬度和地貌等资料,据此制定工作计划及应对意外状况的备选计划。准备阶段首先向有关部门递交申请材料,得到批准后展开后续工作; 选取基站点主要考虑基站不能距离作业区过远,基站上空无高压线和鸟群等危险因素或明显遮挡物,随着科学发展出现的虚拟基站技术则简化了自架实体基站的工作; 设计航线时根据最终成果要求设定航高、飞行范围、扫描频率等参数,确定航线间隔并保证相邻条带间的重叠度要求,计算出飞机加速、减速、掉头的位置,最优化航线可减少飞机持续直线航行导致的惯性测量单元(inertial measurement unit,IMU)的误差累计; 选取校验场时,对多通道系统来说,至少有1个负责修正陆域和浅水域的陆地校验场和1个负责修正浅水域与深水域的水上校验场,陆地校验场应具备明显建筑物目标,水上校验场应为水质清澈的岸线区域[18]。正式作业首先安装与调试设备,排除故障,设置相应参数; 校验场飞行的目的是进行系统检校,解算俯仰、侧滚、航向角偏移与距离偏移等,后续应用于误差改正; 测区飞行应以安全为首,提醒在场人员激光对眼睛的危害性[19],机载平台启动后要激活惯导[20]; 飞行期间需同步测量潮位数据,用于后续修正水深值。飞行结束后,及时查看获取到各类数据的质量及完整性,若出现数据缺失或错误,启动备选计划补测或重测。
3 机载激光测深数据处理
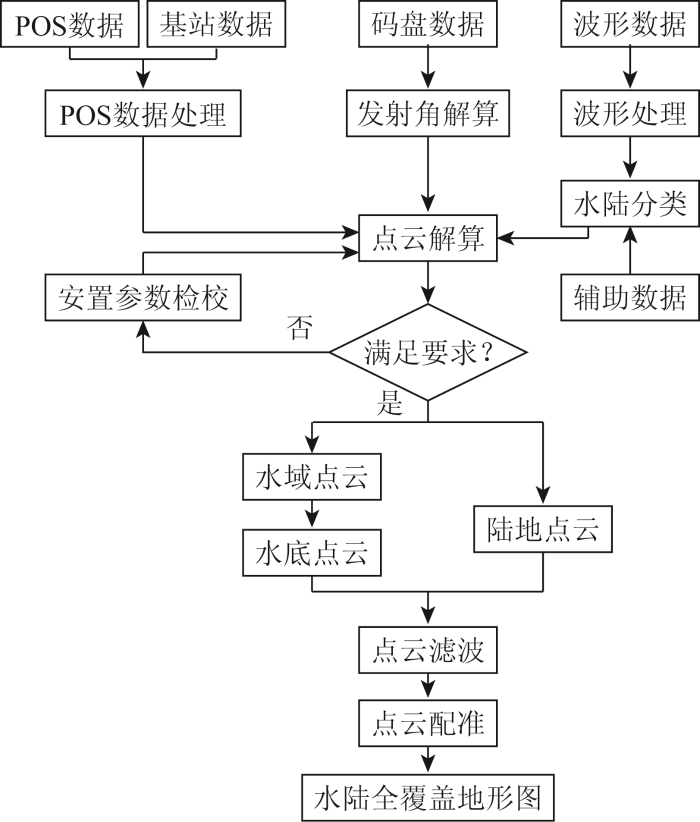
图5
3.1 数据预处理
数据预处理主要包括POS数据处理和安置参数检校过程。
3.1.1 POS数据处理
POS利用动态后处理差分技术(post processed kinematic,PPK),根据机载GNSS接收机和基站数据计算激光脉冲发射时刻的初始位置,再通过IMU数据获取飞行平台的姿态变化增量,应用卡尔曼滤波器和反馈误差控制迭代获取激光脉冲发射时刻的空间位置和飞行平台的侧滚角、俯仰角及航向角数据。
3.1.2 安置参数检校
3.2 波形数据处理
机载激光测深系统常用记录方式为全波形回波,波形数据处理主要涉及波形去噪、反卷积、波峰探测与数值模拟方法。由于激光脉冲在水中和空气中传播特性存在差异,还需利用波形数据实现水陆分类,为后续数据处理奠定基础。
3.2.1 波形去噪
噪声可分为外界背景噪声与系统内部噪声,全波形数据处理首要过程通常是波形去噪。高斯滤波是一种线性平滑滤波器,能降低数据尖锐变化,本质是将波形与高斯函数进行卷积计算。移动平滑要选择合理窗口长度,取窗口内平均值作为该点数据,滑动窗口得到所有点的平均值。Savitzky-Golay(S-G)滤波可看作移动加权平滑滤波算法,基于局部数据多项式拟合,通过滑动窗口对所有数据平滑处理[24]。小波去噪首先对信号进行小波分解得到系数,筛除小于所设阈值的系数,从而达到去噪目的,由其衍生出的自适应阈值小波去噪方法则优化了阈值选取范围,避免了去除有效信号的问题。
3.2.2 反卷积
接收波形可视为系统发射波形与目标反射截面的卷积,反卷积可理解为其逆向过程,由接收波形反算目标反射截面。傅里叶反卷积(Fourier transform deconvolution,FTD)是最简易的反卷积算法,通过傅里叶变换在频域中直接进行逆滤波去除发射信号,但其受噪声干扰大,维纳滤波反卷积(Wiener filter deconvolution,WFD)则是FTD的改进[25]。理查德森-露西反卷积(Richardson-Lucy deconvolution,RLD)最初是一种图像复原算法,派生自贝叶斯理论,属于极大似然估计法,该算法也可用于波形数据处理[26]。非负最小二乘算法(nonnegative least squares,NNLS)是在时域内计算使波形估计值与实际波形间平方误差最小的非负解,实质是将反卷积转化为矩阵分解问题[27]。
3.2.3 波峰探测
波峰探测可获取全波形数据的峰值位置,常规方法有极大值检测和平均方差函数(average square difference function,ASDF)等。极大值检测即查找波形中局部极大值点,得到结果后应筛除无效极大值点。ASDF则是通过计算发射波形与接收波形的相关性,将相关性极大值点作为信号位置[28]。
3.2.4 数值模拟
数值模拟的核心是以合适的函数拟合波形。激光在穿透水面前于空气中传播,较严格遵守高斯函数规律,因此常用高斯函数[29]拟合水面,若考虑激光穿透水面瞬间发生的衰减作用,可将水面回波表示为高斯与指数函数的卷积[30]。针对水底回波,拟合方法还有韦伯分解函数[31]等。水深较浅时可忽略水体后向散射的影响,仅考虑水面和水底回波,但水体回波影响较大时,可利用三角形函数、四边形函数和指数函数来拟合水体回波[32-33]。数值模拟本质是最优化问题,初始参数的选择与后续迭代求解模型的算法都很关键,常用的求解参数方法有非线性阻尼最小二乘方法(levenberg-marquardt,LM)和期望最大化方法(expectation-maximization,EM)[34]等。
3.2.5 算法组合及改进
3.2.6 水陆分类
机载激光测深系统可同时测定水域与陆地,从众多数据中识别水陆波束成为数据处理关键。水陆分类混淆区域往往是泥滩或极浅水域,蓝绿激光回波信号易发生重叠,增加红外光辅助通道可准确探测陆地,多波段激光的组合使用可提高分类精度[40]。王丹菂等[41]提出的基于单频机载激光测深海陆回波自动分类方法不借助其他波段激光也可实现分类。此外,基于波形的分类方法还有Ji等[42]根据不同波形形态特征提出的随机森林特征选择模型,以及胡善江等[43]提出的基于深度学习的海陆波形分类等。影像辅助法和基于点云的分类也可进行水陆识别,影像辅助法借助相机和卫星等获取的影像资料从点云中匹配瞬时分界线,但可能存在影像与点云数据时间不同步的问题[44]。基于点云的分类方法则有Smeeckaert等[45]提出的支持向量机模型(support vector machines,SVM),以及王晓阳[46]提出的三维点云高程阈值分类法等。
3.3 误差修正
表1 机载激光测深误差分析
Tab.1
| 误差项 | 误差源 | |
|---|---|---|
| 系统本身 | 量测时间误差 | 各部件工作时间并非完全同步,脉冲位置估计和非线性信号处理导致检测时间不准确 |
| 设备安置误差 | 系统扫描轴偏转、IMU角度不平行 | |
| 外部环境 | 光速测量误差 | 不同介质中光速不同,但光速数值较大且在浅水测深,所以此影响较小 |
| 大气传输误差 | 在大气中传输因吸收或散射导致能量损耗 | |
| 波浪潮汐变化误差 | 激光入射瞬间波浪和潮汐变化导致瞬时水深偏差 | |
| 折射误差 | 大气与水密度不同产生折射现象,大气与水面间的折射现象影响较大,而在水体中的影响相对较小 | |
| 水中散射误差 | 散射效应主要分为后向散射效应和前向散射效应 | |
| 不规则地形起伏误差 | 水下地形不规则,具有不同坡度、曲率和粗糙度 | |
| 其他因素 | 数据计算精度误差 | 处理数据时涉及到矩阵坐标变换等复杂过程,产生计算精度误差 |
误差修正的研究方向主要分为综合修正和单一误差改正。赵建虎等[50]采用逐步回归法构建了一种改进的顾及水深、水体含沙量、波束扫描角和传感器高度等参数的深度偏差修正模型,可满足国际海道测量组织的规定标准; 叶修松等[51]着重讨论了IMU姿态测量误差影响,并结合扫描角误差、测距误差和平台坐标系原点误差进行了计算分析; Yang等[52]提出了一种基于海面剖面和射线追踪的空气-水面折射校正方法,首先利用最小二乘法和波浪谱拟合3D海面,再根据海面坡度,通过追踪空气与水面分界处的每个激光传输路径来校正激光点地理位置偏差; Xu等[53]则采用基于维度特征的邻域自适应方法计算激光脉冲入水瞬间的海面法向量,并结合激光脉冲传播的几何模型进行顾及海面波动的折射误差改正。
3.4 点云数据处理
生成初始点云后,还需进行去噪、滤波和配准等处理。点云去噪针对随机且无规律的离群点,如飞鸟、云等明显高于或低于目标地物的点; 点云滤波是从点云数据中分离地面点和非地面点的过程; 点云配准则是将航带点云拼接为完整测区点云的过程。
3.4.1 点云滤波
3.4.2 点云配准
4 总结与展望
近年来,机载激光测深硬件设备趋于小型化、简单化与多功能。小型化意味着系统重量轻,方便携带与搭载; 简单化是对内部传感器等进行改进,降低硬件结构复杂度; 多功能即获取全波形数据、点云数据、光谱数据和影像数据等多元数据。机载激光测深技术的硬件研制日益完善,也出现了一些具备基础功能的商业化数据处理软件,但商业化数据处理软件不能完全满足需求,且在数据处理方面还需解决如下问题:
1)在较深水域,水底信号微弱且受噪声影响,难以准确分辨真实水底位置; 在极浅水域,则出现水底和水面波峰叠加的情况,如何从冗杂的波形中分解或提取出有效信号成为波形数据处理的关键。
2)优化测深精度需对激光传播路径的各类误差进行修正处理,同时要兼顾误差修正算法的空间复杂度与时间复杂度。
3)水下地形的点云滤波和点云配准等技术尚未成熟,且部分算法依旧参考陆域的处理方法,可能导致数据质量不佳,进一步提高水下地形点云密度对数据处理方法有更高要求。
随着机载激光测深技术的不断发展,未来机载激光测深系统需突破测量水下地形的单一功能,实际应用于水体参数反演、底质分类和目标探测等。国际上机载激光测深系统已体现出巨大的经济效应,因此,我国开展高性能机载激光测深系统研发及数据处理研究,对岛礁、河流和海岸带等监管与保护工作具有重要意义。
参考文献
Multibeam bathymetric sonar:Sea beam and hydro chart
[J].DOI:10.1080/15210608009379375 URL [本文引用: 1]
基于单波束多波束测深系统的海洋航道测量方法
[J].
Sea channel survey method considering single beam multi beam bathymetric system
[J].
浅海水深光学遥感研究进展
[J].
Progress in shallow water depth mapping from optical remote sensing
[J].
Assessing the accuracy of underwater photogrammetry for archaeology:A comparison of structure from motion photogrammetry and real time kinematic survey at the east key construction wreck
[J].
DOI:10.3390/jmse8110849
URL
[本文引用: 1]

The National Park Service (NPS) Submerged Resources Center (SRC) documented the East Key Construction Wreck in Dry Tortugas National Park using Structure from Motion photogrammetry, traditional archaeological hand mapping, and real time kinematic GPS (Global Positioning System) survey to test the accuracy of and establish a baseline “worst case scenario” for 3D models created with NPS SRC’s tri-camera photogrammetry system, SeaArray. The data sets were compared using statistical analysis to determine accuracy and precision. Additionally, the team evaluated the amount of time and resources necessary to produce an acceptably accurate photogrammetry model that can be used for a variety of archaeological functions, including site monitoring and interpretation. Through statistical analysis, the team determined that, in the worst case scenario, in its current iteration, photogrammetry models created with SeaArray have a margin of error of 5.29 cm at a site over 84 m in length and 65 m in width. This paper discusses the design of the survey, acquisition and processing of data, analysis, issues encountered, and plans to improve the accuracy of the SeaArray photogrammetry system.
Airborne LiDAR bathymetry
[J].DOI:10.1080/01431168608954714 URL [本文引用: 1]
机载海洋激光雷达发展综述
[J].
Survey of airborne oceanic LiDAR
[J].
机载激光测深技术研究进展
[J].
The development of airborne laser bathymetry
[J].
机载激光雷达测深技术与应用研究进展
[J].
Development of airborne laser bathymetric technology and applications
[J].
机载激光测深技术及其研究进展
[J].
Research progress of airborne laser bathymetry technology
[J].
基于CZMIL Nova的中国海岸带机载激光雷达测深潜力分析
[J].
Potential evaluation of China’s coastal airborne LiDAR bathymetry based on CZMIL Nova
[J].
机载激光测深作业的关键技术问题
[J].
The key technical issues on airborne LiDAR bathymetry operation
[J].
基于CZMIL测深技术的海陆一体地形测量初探
[J].
A preliminary study on land-sea integrated topographic surveying based on CZMIL bathymetric technique
[J].
浅海底质高光谱反射率测量系统的设计及应用
[J].
Design and application of reflectance measurement system for sea bottom in optically shallow water
[J].
机载激光雷达测深系统大规模应用测试与评估——以中国海岸带为例
[J].
Large-scale application test and evaluation of an airborne LiDAR bathymetry system:A case study in China’s coastal zone
[J].
激光对人体的损伤,激光产品的分级标准及安全防护措施
[J].
The damage of laser to human body and the methods of protection
[J].
机载激光浅海测深技术的现状和发展
[J].
Current status and development of airborne laser bathymetry technology
[J].
机载POS系统中惯性测量单元精度检校方法
[J].
Calibration method of IMU on airborne POS
[J].
共面约束的机载LiDAR IMU安置角误差自动检校方法
[J].
An automatic bore-sight calibration method for airborne LiDAR based on co-planar constrains
[J].
Range Determination with waveform recording laser systems using a Wiener filter
[J].
Acceleration of iterative image restoration algorithms
[J].A new technique for the acceleration of iterative image restoration algorithms is proposed. The method is based on the principles of vector extrapolation and does not require the minimization of a cost function. The algorithm is derived and its performance illustrated with Richardson-Lucy (R-L) and maximum entropy (ME) deconvolution algorithms and the Gerchberg-Saxton magnitude and phase retrieval algorithms. Considerable reduction in restoration times is achieved with little image distortion or computational overhead per iteration. The speedup achieved is shown to increase with the number of iterations performed and is easily adapted to suit different algorithms. An example R-L restoration achieves an average speedup of 40 times after 250 iterations and an ME method 20 times after only 50 iterations. An expression for estimating the acceleration factor is derived and confirmed experimentally. Comparisons with other acceleration techniques in the literature reveal significant improvements in speed and stability.
Waveform analysis techniques in airborne laser scanning
[C]//
机载激光测深系统的最小可探测深度研究
[J].
Study of the capability of minimum depth using an airborne laser bathymetry
[J].
Characterization and decomposition of waveforms for laser 500 airborne system
[J].DOI:10.1109/36.101370 URL [本文引用: 1]
Potential of space-borne LiDAR sensors for global bathymetry in coastal and inland waters
[J].DOI:10.1109/JSTARS.4609443 URL [本文引用: 1]
不同函数拟合水体后向散射波形对激光测深精度的影响
[J].
The impact of different fitting functions for water backscatter waveforms on the accuracy of laser sounding
[J].
机载激光测深波形分解中LM与EM参数优化方法比较
[J].
DOI:10.11947/j.AGCS.2020.20180242
[本文引用: 1]
受作业环境与扫描条件的影响,机载激光测深全波形数据处理所得的参数分量初值精度通常较低,需采用优化方法在此基础上进一步调整分量参数以提高波形分解精度。本文代表性地选取了非线性阻尼最小二乘方法(Levenberg-Marquardt,LM)和期望最大化方法(expectation-maximization,EM)两种不同的参数优化方案,针对机载激光测深全波形数据的波形分解参数优化问题,结合实测和模拟波形数据对两种优化方法在相同初值条件下的波形模拟精度、扫描条件及其响应,以及水深估计偏差等方面的特征进行了详细的对比分析,着重探讨了两种参数优化方法所得结果的准确度与稳定性,并对其主要技术特征与效果差异进行了总结。
Comparison of LM and EM parameter optimization methods for airborne laser bathymetric full-waveform decomposition
[J].
DOI:10.11947/j.AGCS.2020.20180242
[本文引用: 1]
As operating environment and scanning conditions would affect the accuracy of the parameters of initial waveform decomposition, it is necessary to use some optimization method to adjust the initial parameters for making the results more precise. With the measured and simulated data, the strategies of Levenberg-Marquardt (LM) and expectation-maximization (EM) have been chosen typically in this paper. It is studied that the features of the waveform fitting precision, the scanning condition response and the depth of the deviation in the same initial parameters condition. The accuracy and stability of the data processing results has been discussed in detail, and the main technical features and the difference of the results of the two methods has been summarized in this paper.
Decomposition of LiDAR waveforms by B-spline-based modeling
[J].DOI:10.1016/j.isprsjprs.2017.03.006 URL [本文引用: 1]
一种由粗到精的机载激光测深信号检测方法
[J].
DOI:10.11947/j.AGCS.2018.20170466
[本文引用: 1]
针对机载激光测深(airborne lidar bathymetry,ALB)中不同环境下波形的差异性较大,且信号检测精度受限于系统采样间隔等问题,提出一种由粗到精的机载激光测深信号检测方法。该方法首先利用接收波形的有效长度快速估计水深;粗检测依据水深近似值,分别采用理查德森-露西去卷积法(Richardson-Lucy deconvolution,RLD)和平均差方函数法(average square difference function,ASDF)对波形预处理,通过包含距离、导数和极值约束的逐级检测确定信号的初始位置;精检测以粗检测结果为初值,利用改进的二阶多项式指数函数模型,并在模型参数求解中引入信赖域优化算法以实现波形的精确拟合,进而获得信号的精确位置。实测数据和模拟数据的试验结果表明,粗检测能够根据波形的特点采取相应的处理方式为精检测提供可靠的初值;精检测可将检测结果精确至子采样间隔并在粗检测基础上进一步提高精度。与极大值检测、ASDF、RLD和四边形拟合法等传统方法相比,本文方法正确率平均提高10%左右,精度平均提高约30%。
A coarse-to-fine signal detection method for airborne LiDAR bathymetry
[J].
DOI:10.11947/j.AGCS.2018.20170466
[本文引用: 1]
To solve the problems that waveforms vary with different environments and detection accuracy is limited by the sampling interval of airborne LiDAR bathymetry (ALB) system,a coarse-to-fine signal detection method for ALB is proposed.The effective length of the received waveform is first calculated from the system transmit signal parameters as an approximation of water depth.For the coarse detection,the received waveform is preprocessed based on Richardson-Lucy deconvolution (RLD) and average square difference function (ASDF),determined by the approximation of water depth,and through a constrained detection method signals are detected from the preprocessed waveform as the initial values of the accurate detection.In the accurate detection,an improved exponential function with a second-order polynomial model is proposed to fit the received waveform and trust region algorithm is introduced to solve the model parameters.Thus,the exact positions of the signals are obtained.The experimental results show that the coarse detection can cope with the waveforms appropriately based on these characteristics and acquire reliable results.The detection results are accurate to subsampling interval and the accuracy of the coarse detection results is further improved by the accurate detection.Compared to the traditional methods including maximum detection,ASDF,RLD and quadrilateral fitting,the success rate and the accuracy of the proposed method averagely achieve nearly 10% and 30% improvement respectively.
基于分层异构模型的机载激光测深波形拟合算法
[J].
Fitting algorithm for airborne laser bathymetric waveforms based on layered heterogeneous model
[J].
Design and evaluation of a full-wave surface and bottom-detection algorithm for LiDAR bathymetry of very shallow waters
[J].DOI:10.1016/j.isprsjprs.2019.02.002 URL [本文引用: 1]
An airborne LiDAR bathymetric waveform decomposition method in very shallow water:A case study around Yuanzhi Island in the South China Sea
[J].DOI:10.1016/j.jag.2022.102788 URL [本文引用: 1]
单频机载激光测深海陆回波自动分类方法
[J].
DOI:10.11947/j.AGCS.2022.20200314
[本文引用: 1]
海陆回波分类是机载激光测深中的一项波形预处理步骤,关系着后续信号检测和点云生成的精度。针对现有海陆回波分类方法不适用于单频机载激光测深系统且自动化程度不高的问题,本文提出一种单频机载激光测深海陆回波自动分类方法:首先,通过首末回波信号检测及点位计算获得回波的点云高程特征;然后,采用高程直方图拟合的方式确定平均水面位置,依据点云高程特征判定大部分回波的海陆属性,对余下的未定回波,仅保留其中的最强信号并统一处理为单信号回波,同时提取波形的信号特征和能量分布特征,依据点云高程特征的相似性自动建立训练样本集;最后,利用支持向量机分类器实现未定回波的分类。采用国产系统Mapper5000采集的实测数据进行试验,结果表明基于首末回波点云的初分类可快速、准确地对远离海陆交界处的回波进行分类,基于波形特征的未定回波分类可在自动建立的训练样本集支持下实现海陆交界处未定回波的高精度分类。与传统方法相比,本文方法无须近红外通道波形和人工样本的辅助就可以达到较高的分类精度,其中总体分类精度可达99.82%,海陆交界处分类精度可达91.59%。
Automatic sea-land waveform classification method for single-wavelength airborne LiDAR bathymetry
[J].
DOI:10.11947/j.AGCS.2022.20200314
[本文引用: 1]
Sea-land waveform classification is a preprocessing procedure for airborne LiDAR bathymetry (ALB), which is related to the accuracy of subsequent signal detection and point cloud generation. However, the existing methods are not applicable for single-wavelength ALB systems and have low degree of automation. Thus, an automatic sea-land waveform classification method for single-wavelength ALB is proposed. The point cloud elevation features are firstly obtained by the detection of the first and last signals and the calculation of the point coordinates. With the mean water level elevation approximated by elevation histogram fitting, most of the sea and land waveforms are classified based on the elevation features. The remaining undefined waveforms are processed as single-signal waveforms with only the strongest signal retained. The signal features and energy distribution features are extracted from the waveforms, and a train sample set is automatically generated using the similarity of point cloud elevation features. The sea-land labels of the undefined waveforms are finally determined by a support vector machine classifier. The field data collected by a domestic ALB system (Mapper5000) are used to test the proposed method. The experimental results show that the initial classification based on the point cloud elevation features can quickly and accurately classify the waveforms away from the sea-land boundary, and the undefined waveform classification based on waveform features can automatically classify the waveforms closed to the sea-land boundary with the support of the self-established train sample set. Compared to the traditional methods, the proposed method can achieve high accuracy sea-land classification without the assistance of near-infrared channel and manual samples, and the overall accuracy and the accuracy of the areas closed to sea-land boundary reach 99.82% and 91.59%, respectively.
Island feature classification for single-wavelength airborne LiDAR bathymetry based on full-waveform parameters
[J].
DOI:10.1364/AO.420673
URL
[本文引用: 1]
Because it is lightweight, low cost, and has high sampling density, single-wavelength airborne lidar bathymetry (ALB) is an ideal choice for shallow water measurements. However, due to severe waveform mixing, waveform classification has become the key difficulty in the research of single-wavelength ALB signal detection. Generally, the interaction between a laser and a water column leads to energy attenuation, pulse delay, or broadening of the water waveform, which has a discernible difference between terrestrial laser echo. This work attempts to focus on the morphology features in different waveforms to classify isolated, supersaturated, land, and water waveforms, and obtain a water–land division. The generalized Gaussian model optimized by the Levenberg–Marquardt algorithm (LM-GGM) is driven to extract 38-dimensional waveform parameters, covering different echo signals and their relationships. Ten-dimensional dominant features are selected from the feature matrix based on the random forest feature selection (RFFS) model, and input to the random forest classification model. Experiments show that the overall classification accuracy of the waveform is 97%.
基于深度学习的机载激光海洋测深海陆波形分类(英文)
[J].
Classification of sea and land waveforms based on deep learning for airborne laser bathymetry
[J].
Early results of simultaneous terrain and shallow water bathymetry mapping using a single-wavelength airborne LiDAR sensor
[J].DOI:10.1109/JSTARS.4609443 URL [本文引用: 1]
Classification of water surfaces using airborne topographic LiDAR data
[C]//
机载激光雷达测深技术研究与进展
[J].
Bathymetric technology and research status of airborne LiDAR
[J].
Propagated uncertainty models arising from device,environment,and target for a small laser spot airborne LiDAR bathymetry and its verification in the South China Sea
[J].DOI:10.1109/TGRS.36 URL [本文引用: 1]
Analysis and correction of ocean wave pattern induced systematic coordinate errors in airborne LiDAR bathymetry
[J].DOI:10.1016/j.isprsjprs.2017.04.008 URL [本文引用: 1]
一种改进的机载激光测深深度偏差模型
[J].
A correction model for depth bias in airborne LiDAR bathymetry systems
[J].
机载激光水深测量误差分析
[J].
Analysis of the airborne laser scanning bathymetry errors
[J].
Refraction correction of airborne LiDAR bathymetry based on sea surface profile and ray tracing
[J].DOI:10.1109/TGRS.2017.2721442 URL [本文引用: 1]
Refraction error correction of airborne LiDAR bathymetry data considering sea surface waves
[J].DOI:10.1016/j.jag.2021.102402 URL [本文引用: 1]
An easy-to-use airborne LiDAR data filtering method based on cloth simulation
[J].DOI:10.3390/rs8060501 URL [本文引用: 1]
Filtering of airborne LiDAR bathymetry based on bidirectional cloth simulation
[J].DOI:10.1016/j.isprsjprs.2020.03.004 URL [本文引用: 1]
机载激光测深数据配准方法比较
[J].
Comparison of airborne LiDAR bathymetry data refistration methods
[J].
Mosaicing of airborne LiDAR bathymetry strips based on Monte Carlo matching
[J].DOI:10.1007/s11001-017-9309-4 URL [本文引用: 1]
Registration of airborne LiDAR bathymetry and multibeam echo sounder point clouds
[J].
A coarse-to-fine strip mosaicing model for airborne bathymetric LiDAR data
[J].DOI:10.1109/TGRS.2021.3050789 URL [本文引用: 1]
Feature curve-based registration for airborne LiDAR bathymetry point clouds
[J].DOI:10.1016/j.jag.2022.102883 URL [本文引用: 1]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}