

0 引言
截至2021—2022年榨季,广西地区甘蔗产量占全国产量的69%以上[1],在国家糖料供给体系中具有举足轻重的地位。研究基于卫星遥感影像的甘蔗产量预测对广西甘蔗种植业生产管理与贸易决策具有重要意义。
对于卫星遥感尺度的作物产量预测研究而言,从影像中识别和提取研究区域是开展后续工作的重要基础,使用无监督学习算法无需标注数据集即可对卫星遥感影像中目视差别较大的几种地物如植被、非植被及水体进行提取[2],但无监督学习的分类结果不具备标签,无法识别特定目标。因此,针对遥感影像特定目标的识别任务常通过有监督学习算法来实现。有监督的机器学习算法能够实现具有较高精度的单类或多类地物分类[3⇓-5],但机器学习算法的可读性较差,难以提取遥感影像中更复杂的空间、纹理特征,需要通过大量实验确定用于分类的最优特征。而深度学习算法可从原始数据中捕获深层次的信息并自动选取出最优特征,比机器学习算法的分类效果更好[6],通过设计或改进算法,可从像素级别识别多种作物[7⇓⇓-10]。但深度学习算法通常具有较深的网络结构,计算成本高。近年来有越来越多的轻量级网络用于快速检测,其层次较浅,计算成本低,同时还兼顾了精度和性能优势,能以极高的效率完成面积广、影像大的分类任务[11-12]。不同于巴西、澳大利亚等以平原为主的甘蔗种植大国,我国广西属于山地丘陵性盆地地貌[13],地表植被种类多,甘蔗地块破碎、分散,近年来仅有少量针对中高空间分辨率卫星遥感影像以及对特定地区基于目视解译[14]或机器学习算法[15]进行的甘蔗种植区域识别研究。针对地形复杂、甘蔗区域植被多样的地表环境,研究准确高效的甘蔗种植区域识别模型是要解决的关键问题之一。
另一方面,植被指数是体现作物生长状态的重要指标,利用卫星遥感技术的作物产量预测研究大多基于植被指数开展。早期多光谱卫星如MODIS和SPOT等影像的空间分辨率较低,单个像素可能混合较多非甘蔗种植区域,由这些影像提取的植被指数通常需要结合地面传感器数据[16]或气象数据[17]才能粗略地估算出产量。随着卫星遥感技术的进步,利用中高空间分辨率的影像,如Sentinel-2和Landsat8等,可对甘蔗种植区域及其植被指数进行准确提取,并且进一步研究发现,特定时期的甘蔗植被指数与产量的线性关系强于其他时期[18],针对其他作物的研究也体现了这一规律[19-20]。另外,研究还发现,结合特定时期的多种植被指数往往能得到更佳的产量预测模型[21-22]。但广西属亚热带季风气候,年均降水量高达1 300~2 000 mm[23],多云、降雨天气较多,难以保证在特定时期获取可用的卫星遥感影像,由此导致甘蔗关键生长期卫星影像不足甚至缺失的问题。如何有效地通过多种卫星遥感影像及前后生长期的遥感影像来估计关键生长期的植被指数,是要解决的又一个关键问题。
针对上述问题,本文针对广西多个大型蔗区2013—2019年的宏观产量数据,通过获取空间分辨率较高的Sentinel-2和Landsat8卫星遥感图像,进行了以下研究来对甘蔗产量进行预测: ①在轻量级卷积神经网络BiseNetV2中加入高效通道注意力模块(efficient channel attention,ECA),构建ECA-BiseNetV2模型,在空间分辨率较高的Sentinel-2遥感影像中对生长中后期的甘蔗种植区域进行识别和提取,并计算甘蔗植被指数; ②针对不同卫星遥感影像波段参数不一致的问题,利用线性转化模型将Landsat8数据转化至Sentinel-2数据的基准,实现不同卫星源的数据融合; ③基于植被指数时间序列数据拟合生长曲线,并提取能反映甘蔗生长峰态的最大拟合值作为代表性特征参数,构建基于多种机器学习算法的甘蔗产量预测模型,从而选取最优模型。
1 研究区概况及数据源
1.1 研究区概况
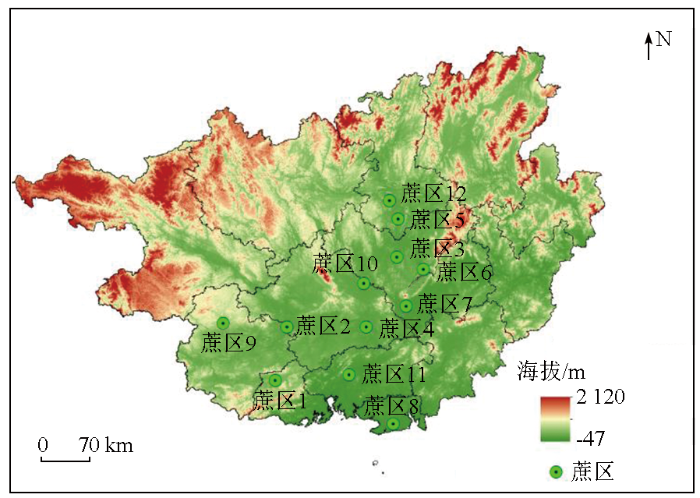
本文的研究区域为广西壮族自治区境内的12个大型蔗区,分别分布于柳州、来宾、南宁、贵港、崇左、钦州、防城港、北海(图1)等地区(N21°32'~24°11', E106°22'~109°43')。广西地区的甘蔗生长季通常从3—4月开始,依次经历出苗期、分蘖期、伸长期和成熟期,9—10月生物量达到峰值,并开始进入糖分积累阶段,12月开始进入榨季,各地逐步开启砍收、糖料生产等工作,持续至来年的3月。
图1
1.2 数据来源
1.2.1 产量数据
蔗区1—12号的产量数据由当地糖厂提供。其中蔗区1—8号分别具有2013—2014到2019—2020这7个榨季的共56个产量数据,蔗区9—12号分别具有2017—2018和2018—2019这2个榨季的共8个产量数据,总计64个产量数据。由于各蔗区种植环境、气候等方面存在差异,甘蔗的产量数据也具有较大差异,基本统计情况如表1所示。
表1 甘蔗产量数据统计情况
Tab.1
| 样本数量 | 最大值/ (t·hm-2) | 最小值/ (t·hm-2) | 均值/ (t·hm-2) | 方差/ (t·hm-2)2 |
|---|---|---|---|---|
| 64 | 161.60 | 49.06 | 85.94 | 602.71 |
1.2.2 卫星数据选取
Landsat8卫星于2013年2月发射,重访周期为16 d,具有9个波段; Sentinel-2系列于2015年6月发射Sentinel-2A并于2017年3月发射Sentinel-2B,双星系统重访周期缩短为5 d,具有13个波段。2种卫星具有较高的时间分辨率和空间分辨率,适用于对大范围的作物生长状况进行监测。由于研究对象具有较长的时间跨度,因此本文选用了2013—2015年Landsat8以及2016—2019年Sentinel-2的卫星遥感影像。受天气的影响,每个蔗区每年的可用遥感影像数量在5~12幅不等,主要分布在4—12月。对比2种卫星各波段参数,选取蓝、绿、红、近红外4个对植被敏感的波段,具体参数如表2所示。
表2 卫星遥感影像选取的波段参数
Tab.2
| 敏感 波段 | Landsat8 | Sentinel-2 | ||
|---|---|---|---|---|
| 波长/nm | 分辨率/m | 波长/nm | 分辨率/m | |
| 蓝光 | 450~510 | 30 | 492 | 10 |
| 绿光 | 530~590 | 30 | 560 | 10 |
| 红光 | 640~670 | 30 | 665 | 10 |
| 近红外 | 850~880 | 30 | 833 | 10 |
2 研究方法
2.1 基于轻量级网络的甘蔗种植区域识别
2.1.1 构建数据集
图2
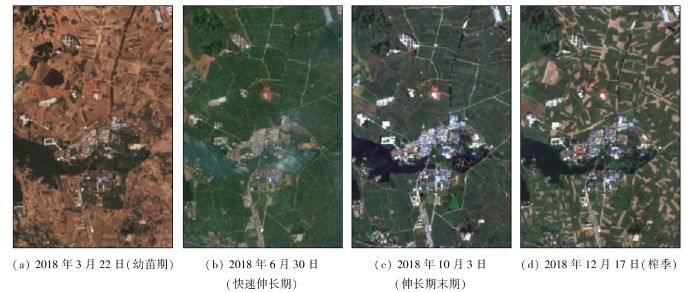
图2
不同时期某蔗区的卫星遥感影像
Fig.2
Satellite images of a sugarcane planting region in different growth periods
表3 卫星遥感影像基本信息
Tab.3
| 影像编号 | 地理位置 | 成像时间 | 云量/% | 像素分辨率/m |
|---|---|---|---|---|
| T48QZL | 蔗区1号 | 2018-10-03 | <5 | 10 |
| T48QYL | 蔗区1号 | 2019-09-28 | <5 | 10 |
| T49QBF | 蔗区2号 | 2019-09-28 | <5 | 10 |
| T48QYK | 蔗区3号 | 2020-10-22 | <5 | 10 |
蔗区1号的横州市良圻农场为本研究提供了甘蔗地块的中心坐标信息,共包含11 682个甘蔗地块中心点的坐标,其分布情况如图3所示。但由于缺乏边界信息,还需进一步人工标注边界。蔗区2号和蔗区3号缺少地块坐标信息,因此使用了空间分辨率较高的Google Earth卫星影像(空间分辨率达到0.5 m),经地理校正对齐后作为辅助标注图像,再结合甘蔗冠层的颜色、纹理特征对蔗区进行目视解译,以扩充数据集。
图3
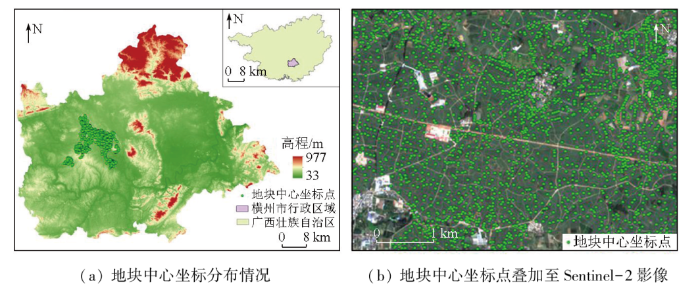
图3
良圻农场甘蔗地块中心坐标点分布情况
Fig.3
Central coordinate distribution of the sugarcane fields in Liangqi farm
最终的原始数据集包括159张300像素×300像素的Sentinel-2卫星遥感影像,累计标注了2 649个甘蔗种植区域。其中,根据地块中心坐标标注所得的影像为100张,标注区域数量为1 578个,由谷歌地球卫星目视解译标注的影像59张,标注区域1 071个。通过对影像进行旋转、镜像等操作进一步扩充数据集,共获得636张带有标注信息的影像数据集。将该数据集以6∶2∶2的比例划分为训练集、验证集和测试集。
2.1.2 语义分割网络模型
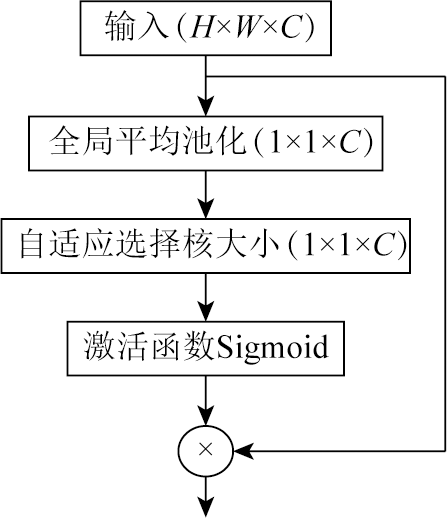
复杂的卷积神经网络如FCN[24]和U-Net[25]等通常具有较深的层次,对计算机硬件性能的要求较高,由于本文仅需对甘蔗一种类别进行识别,所以使用分类精度高且对硬件性能要求较低的轻量级网络BiseNetV2[26]作为基础,再加入ECA模块[27]对网络进行改进。ECA的基本结构如图4所示,图中H,W和C分别为影像高、宽和通道数。该模块设计了一个自适应动态卷积核来捕获通道之间的信息,以获得不同通道的权重值,并由Sigmoid输出描述权重的特征图。自适应动态卷积操作的步长为1,因此不会改变输出特征图的尺寸。ECA模块的引入能使模型以较小的计算代价对输入特征的关键部分进行加权,并降低无关特征的权重。
图4
改进的ECA-BiseNetV2网络结构如图5所示。其主体为二分支架构,包含一个传统的卷积分支和一个可分离卷积分支,可将不同尺度的特征图进行融合,从而同时获得精细和全局的语义信息。此外,ECA-BiseNetV2还设计了一个渐进式上采样模块,在上采样时具有更好的性能和速度。
图5
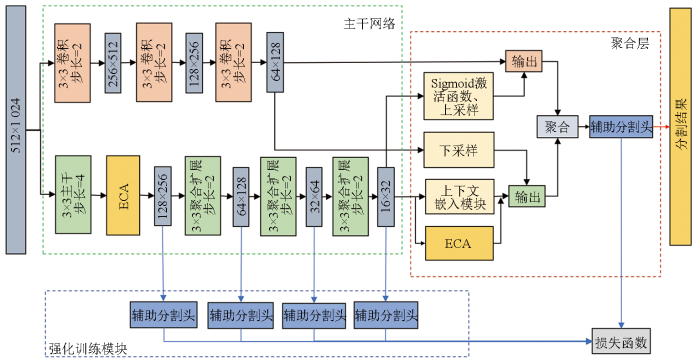
为提升模型对细节识别的准确度,在ECA-BiseNetV2的语义分支主干模块和上下文模块中引入了ECA模块,可以在语义特征输入和输出时,使语义分支聚焦于特征,帮助模型更好地关注重要的语义信息,提高语义分割的准确性。本次实验中,将ECA-BiseNetV2网络的初始学习率设置为0.01,优化器选择sgd,损失函数选择CrossEntropyLoss,迭代次数为3 000次,每次迭代的批次大小为4。另选取基础网络BiseNetV2以及较为主流的U-Net,SegNet[28],DeepLabV3+[29],Fast-SCNN[30]和BiseNetV1[31]网络构建对照模型,训练参数同ECA-BiseNetV2网络。
2.2 植被指数提取及变化趋势拟合
2.2.1 植被指数提取
为提取各蔗区不同时期的甘蔗植被指数,将ECA-BiseNetV2语义分割模型应用于各蔗区、各年份的9—10月的Sentinel-2低云量影像中,以得到各蔗区甘蔗种植区域的分类结果。进一步将分类结果转换为带地理信息的掩模文件(图6)应用到其他时期及其他类型的遥感影像中以确定采样区域。考虑到蔗区的作物类型通常不会发生变化,2013—2015年的Landsat8影像直接采用了2015年或2016年的基于Sentinel-2影像的分类结果进行掩模。
图6
通过掩模提取不同时期卫星影像的感兴趣区域(region of interest, ROI),并统计ROI中各波段的像素平均值,计算植被指数。本文选取了6种常见的植被指数,包括比例植被指数(ratio vegetation index,RVI)、增强型植被指数(enhanced vegetation index,EVI)、耐大气植被指数(atmospherically resistant vegetation index,ARVI)、归一化植被指数(normalized difference vegetation index,NDVI)、改良土壤调整植被指数(modified soil adjusted vegetation index,MSAVI)、优化的土壤调整植被指数(optimized soil adjusted vegetation index,OSAVI),如表4所示,其中BLUE,RED和NIR分别表示蓝、红和近红外波段的像素平均值。
表4 植被指数及计算公式
Tab.4
| 植被指数 | 计算公式 |
|---|---|
| RVI | |
| EVI | |
| ARVI | |
| NDVI | |
| MSAVI | |
| OSAVI |
2.2.2 卫星数据融合
Landsat8和Sentinel-2的传感器、轨道等具有一定差异,二者的特征波段也并不完全一致,进而导致同一时期、同一区域提取得到的植被指数存在差异。为降低这种差异,抽样选取了4组拍摄时间和空间尽可能一致且云量低的Sentinel-2和Landsat8影像(表5),通过对二者的植被指数进行分析,构建转化模型。
表5 4组影像成像信息
Tab.5
| 组别 | 卫星 | 成像时间(格林尼治标准时间) | 太阳方位角/(°) |
|---|---|---|---|
| 第1组 | Sentinel-2 | 2019-09-23 03:31:36.497 072 | 142.284 368 98 |
| Landsat8 | 2019-09-23 03:17:09.454 461 | 134.876 687 23 | |
| 第2组 | Sentinel-2 | 2019-09-25 03:21:28.373 447 | 142.049 097 88 |
| Landsat8 | 2019-09-25 03:04:48.402 126 | 136.096 298 00 | |
| 第3组 | Sentinel-2 | 2019-11-10 03:41:53.132 702 | 160.935 621 44 |
| Landsat8 | 2019-11-10 03:17:36.267 949 | 152.188 601 14 | |
| 第4组 | Sentinel-2 | 2020-04-27 03:21:37.616 403 | 112.802 340 64 |
| Landsat8 | 2020-04-27 03:10:09.707 394 | 108.816 244 32 |
在每组影像中分别选取采样区域面积为1 km2以上的多个采样区块,4组影像共计采集了770组数据用于研究波段及植被指数差异。将数据集按照7∶3的比例划分为训练集和测试集,使用线性回归算法建立二者的转换模型,将Landsat8数据转化至Sentinel-2数据基准下。
2.2.3 使用三次曲线方程拟合植被指数时序数据
为建立更具泛化能力的甘蔗产量预测模型,需要获取多地区、多年份的具有一致性和代表性的光谱特征数据。常规方法通常是选取某一个或多个特定时期的光谱特征作为自变量。但是,广西地区因其气候原因难以保证特定时期遥感影像的可用性,且不同地区的甘蔗生长起始时间及速度均有差异,单纯依靠获取的有限影像难以获得准确反映甘蔗特定生长期的代表性光谱特征。
甘蔗作物会经历生物量累积阶段和糖分累积阶段: 生物量累积阶段冠层越来越密集,大约9月下旬—10月上旬甘蔗生长达到饱和,随之进入糖分累积阶段,叶片逐渐发黄衰老,植被指数呈现缓慢上升和较快速下降的变化特点。由于12月上旬—次年2月下旬是甘蔗收割工作的高峰期,为避免收割工作对植被指数造成的影响,选取3—11月份的植被指数时间序列数据作为研究对象,通过三次曲线方程拟合得到生长周期内甘蔗植被指数的连续变化趋势,并提取拟合最大值作为特征光谱,以克服影像缺失、生长速度不一致等对光谱特征提取带来的不利影响。公式为:
式中: x为当年的自然日; y为植被指数拟合值; a,b,c,d均为模型的参数。
2.3 基于机器学习的产量预测模型
3 结果分析
3.1 模型分类效果评估
图7
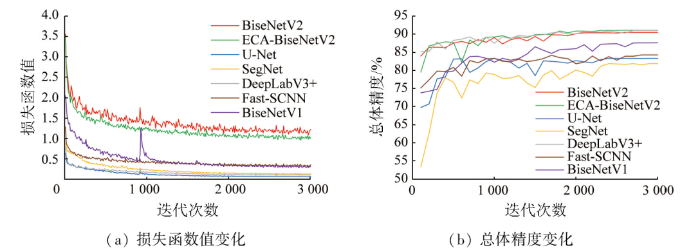
图7
训练过程损失函数值及测试集中总体精度变化曲线
Fig.7
Curves of loss function during training and overall accuracy in the test set
表6 各网络最佳模型的评价指标
Tab.6
| 模型 | Kappa | 总体精 度/% | 查准 率/% | 查全 率/% | 单张推理 时间/ms |
|---|---|---|---|---|---|
| BiseNetV2 | 0.798 6 | 90.43 | 94.62 | 89.87 | 48 |
| ECA-BiseNetV2 | 0.806 9 | 91.54 | 95.57 | 90.78 | 50 |
| U-Net | 0.681 5 | 83.67 | 94.61 | 77.13 | 101 |
| SegNet | 0.642 7 | 81.95 | 95.69 | 73.84 | 95 |
| DeepLabV3+ | 0.801 7 | 91.09 | 94.90 | 90.36 | 105 |
| Fast-SCNN | 0.675 2 | 84.19 | 92.32 | 81.52 | 39 |
| BiseNetV1 | 0.744 8 | 87.68 | 94.27 | 85.51 | 55 |
SegNet对甘蔗像素的查准率最高,达95.69%,但其查全率仅为73.84%,说明SegNet正确识别出的甘蔗面积较小。同为复杂网络的U-Net模型表现也不佳,可能原因是其具有较多的卷积下采样步骤,对本文所使用的低空间分辨率影像而言会更容易丢失细节。Fast-SCNN的单张推理时间最短,但其他精度指标偏低。DeepLabV3+具备较高的总体精度,但推理时间偏长。本文提出的ECA-BiseNetV2和其基础网络BiseNetV2对甘蔗种植区域的识别精度均较高,ECA-BiseNetV2相较于BiseNetV2在各种评价指标中均具有一定程度的提升,Kappa系数、总体精度、查准率以及查全率分别提升了1.03%,1.23%,1.00%以及1.01%,而推理时间没有明显变长,说明改进后的语义分支仍具有较高的性能。2种模型的输出样例如图8所示,其中绿色部分表示甘蔗种植区域的分类结果,红色部分为非甘蔗种植区域的分类结果。A区块为一处地表覆盖物较为多样、甘蔗种植区域面积较小的区域。BiseNetV2成功识别出了该区块有甘蔗种植区域,但识别结果相对保守,略小于实际区域; 而ECA-BiseNetV2模型对此区块的蔗地识别更精准,分类区域的形状更接近原图影像。B和C区块主要为非甘蔗种植区域,ECA-BiseNetV2模型输出的分类形状也更符合实际。
图8
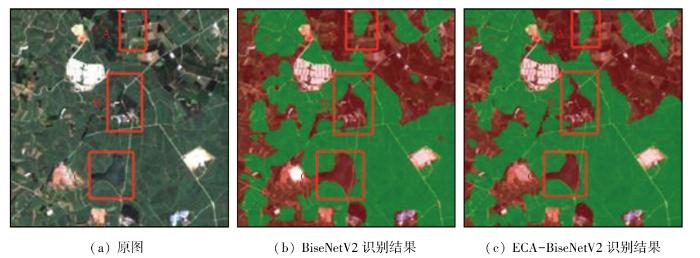
图8
BiseNetV2与ECA-BiseNetV2的输出样例对比
Fig.8
Output results of BiseNetV2 and ECA-BiseNetV2
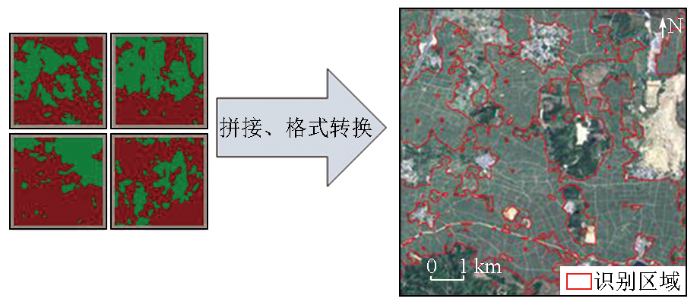
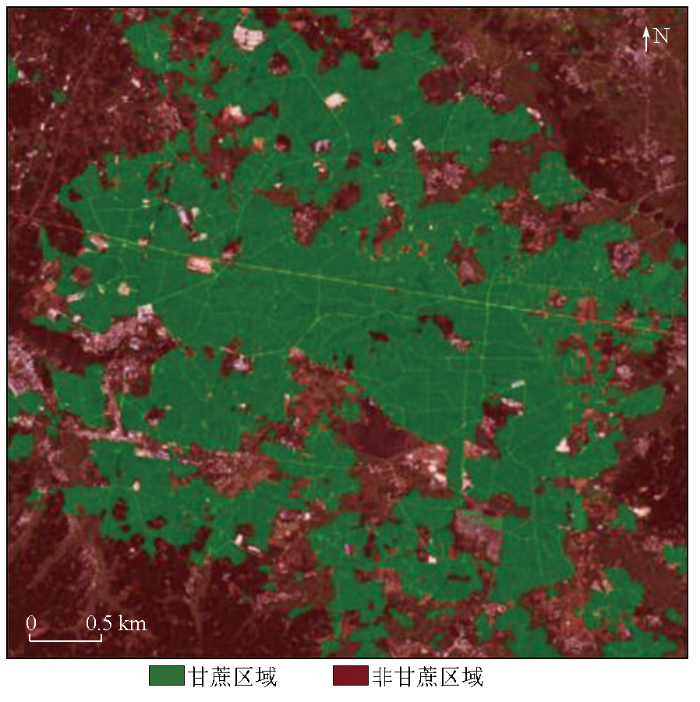
图9展示了ECA-BiseNetV2模型对蔗区的局部识别情况。由于使用分类模型的目的是在尽可能大的区域内识别出属于甘蔗类别的像素,较高的查准率说明由该模型识别得到的甘蔗像素绝大部分符合真值,故ECA-BiseNetV2模型满足了从遥感影像中获取大范围甘蔗种植区域的需求。
图9
3.2 卫星数据融合及三次曲线方程拟合效果
Landsat8与Sentinel-2各波段采样值的差异分析如表7所示,评价指标包括决定系数R2和平均相对误差(mean relative error,MRE)。为测试Landsat8植被指数转化至Sentinel-2标准下的植被指数的线性转化模型效果,采用由训练集得到的线性方程对测试集的Landsat8植被指数进行转化并与对应采样区块的Sentinel-2植被指数进行对比。各植被指数的线性转化模型及其在测试集上的转化结果如表8所示,表中x表示Landsat8植被指数,y为转化为Sentinel-2标准后的植被指数,R2为转化后的Landsat8植被指数与Sentinel-2植被指数之间的决定系数,MRE分别包含了转化前、后的Landsat8植被指数与Sentinel-2的植被指数的相对误差。
表7 Landsat8与Sentinel-2波段值差异分析
Tab.7
| 波段 | R2 | MRE/% |
|---|---|---|
| 蓝光 | 0.885 | 12.26 |
| 绿光 | 0.950 | 4.96 |
| 红光 | 0.977 | 5.37 |
| 近红外 | 0.925 | 2.80 |
表8 各植被指数的线性转化模型及在测试集中的转化结果
Tab.8
| 植被指数 | 线性转化模型 | R2 | MRE/% | |
|---|---|---|---|---|
| 转化前 | 转化后 | |||
| RVI | y = 0.976 9x-0.200 9 | 0.994 | 6.71 | 2.82 |
| NDVI | y = 1.044 7x-0.046 9 | 0.996 | 2.87 | 1.03 |
| EVI | y = 0.961 7x+0.032 4 | 0.945 | 4.66 | 3.84 |
| MSAVI | y = 0.968 9x+0.026 6 | 0.985 | 1.09 | 0.99 |
| ARVI | y = 1.029 3x-0.014 6 | 0.999 | 2.53 | 2.43 |
| OSAVI | y = 1.014 8x-0.013 4 | 0.993 | 1.90 | 1.16 |
将12个蔗区所有的Landsat8植被指数转化成Sentinel-2标准下的植被指数,然后对各蔗区各年份按时间排列的6种植被指数序列数据进行三次曲线拟合。每种植被指数分别得到57条拟合曲线(剔除了7条异常数据),6种植被指数共342条。以2018年蔗区1—4号的NDVI为例,三次曲线方程的拟合结果如图10所示。可以看出,各拟合曲线具有较为一致的变化趋势,符合甘蔗生长规律。
图10
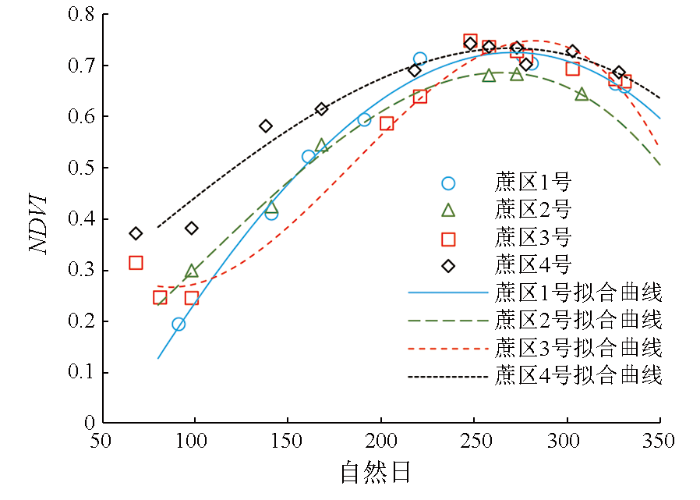
图10
2014年蔗区1—4号的NDVI拟合效果
Fig.10
Fitting results of NDVI in 2014 for sugarcane region 1—4
将曲线方程在具有影像数据的时间节点上的拟合值与实际值进行误差分析,结果如表9所示。可以看出,拟合值与实际值之间的R2均在0.6以上,最高达到了0.953,而MRE最高仅为3.57%,反映出该拟合方式具有良好的通用性,可以较好地还原甘蔗在不同生长期的植被指数。
表9 曲线方程拟合值与时序数据的误差分析
Tab.9
| 植被指数 | R2分布范围 | MRE分布范围/% |
|---|---|---|
| RVI | 0.706~0.934 | 0.69~3.57 |
| NDVI | 0.612~0.849 | 0.43~3.29 |
| EVI | 0.657~0.897 | 1.67~2.98 |
| MSAVI | 0.732~0.953 | 0.35~1.66 |
| ARVI | 0.682~0.861 | 0.89~2.72 |
| OSAVI | 0.714~0.908 | 0.25~1.96 |
3.3 产量预测模型
3.3.1 使用植被指数实际最大值建模
甘蔗生长的饱和时期是产量形成的关键时期,且通常在这一时期植被指数达到最大值。首先从甘蔗各生长周期的可用时序影像数据中挑选出实际的植被指数最大值,并与产量进行相关性分析,结果如表10所示。EVI与产量的相关性较弱,但RVI,NDVI和OSAVI与产量的Pearson相关系数达到了0.7以上,其中OSAVI达到了0.756,显示出较好的线性相关关系。
表10 各植被指数实际最大值与产量的相关性分析
Tab.10
| 植被指数 | Pearson相关系数 |
|---|---|
| RVI | 0.725 |
| NDVI | 0.718 |
| EVI | 0.424 |
| MSAVI | 0.657 |
| ARVI | 0.504 |
| OSAVI | 0.756 |
选择与产量相关性较高的RVI,NDVI,MSAVI,ARVI和OSAVI作为特征变量,以8∶2的比例将数据集划分为训练集和测试集,构建了4种产量预测模型,建模结果如表11所示。
表11 使用实际最大值的各模型训练效果
Tab.11
| 模型 | 训练集 | 测试集 | ||
|---|---|---|---|---|
| MRE/% | R2 | MRE/% | R2 | |
| 逻辑回归 | 8.23 | 0.622 | 10.34 | 0.621 |
| 支持向量机 | 8.87 | 0.586 | 5.75 | 0.561 |
| 决策树 | 3.74 | 0.777 | 9.03 | 0.759 |
| 随机森林 | 3.79 | 0.769 | 10.80 | 0.758 |
在测试集中,逻辑回归和支持向量机模型的R2分别为0.621和0.561,可较好地解释数据的变异性; 决策树和随机森林模型的R2分别达到0.759和0.758,能更好地解释数据的变异性,其中决策树模型的MRE更低,仅为9.03%,说明使用决策树模型能对甘蔗产量作出更准确的预测。
3.3.2 使用曲线方程的拟合最大值建模
表12 植被指数拟合最大值与产量的相关性分析
Tab.12
| 植被指数 | Pearson相关系数 |
|---|---|
| RVI | 0.773 |
| NDVI | 0.831 |
| EVI | 0.444 |
| MSAVI | 0.632 |
| ARVI | 0.535 |
| OSAVI | 0.757 |
将RVI,NDVI,MSAVI,ARVI和OSAVI的拟合最大值作为输入,同样构建了4种产量预测模型,预测结果如表13所示。可以看出,相比使用植被指数实际最大值建立的预测模型,使用拟合最大值构建的模型精度基本上都有所提高,其中决策树的测试集R2达0.792,为所有模型中最高,随机森林模型的R2也达到了0.774。基于拟合最大值构建的逻辑回归、决策树和随机森林预测模型在测试集中的MRE更低,说明采用拟合最大值的方法是科学合理的,具备更高的应用价值。
表13 使用拟合最大值的各模型训练结果
Tab.13
| 模型 | 训练集 | 测试集 | ||
|---|---|---|---|---|
| MRE/% | R2 | MRE/% | R2 | |
| 逻辑回归 | 9.10 | 0.716 | 6.14 | 0.697 |
| 支持向量机 | 9.30 | 0.561 | 8.84 | 0.559 |
| 决策树 | 3.65 | 0.820 | 8.59 | 0.792 |
| 随机森林 | 3.56 | 0.798 | 7.34 | 0.774 |
4 结论
1)提出了一种改进的轻量级分割网络ECA-BiseNetV2,在9—10月的Sentinel-2卫星影像中能准确识别甘蔗种植区域,查准率达到了95.57%,可大大提高蔗田调查效率,有效扩大了采样区域。
2)使用线性转化模型实现了Sentinel-2和Landsat8数据的转化,提供了一种简单有效的方法解决多源卫星遥感图像的数据差异问题; 另外,基于植被指数的时间序列数据构建的三次曲线拟合模型可较好地拟合缺失卫星遥感图像的关键生长期的植被指数。
3)由多个植被指数的拟合最大值构建的产量预测模型的精度比由可用的实际最大值构建的模型精度更高,其中表现最好的决策树模型的测试集R2从0.759提高到了0.792,提升了4.3%,可有效解决因天气问题导致的甘蔗关键生长期遥感图像缺失而难以准确构建产量预测模型的问题,展示出较强的应用性。
参考文献
广西崇左蔗区2022年糖料蔗生产调查
[J].
Investigation on sugar cane production in Chongzuo sugarcane area of Guangxi in 2022
[J].
Classification of Landsat8 satellite data using unsupervised methods
[C]//
基于Landsat的多分类器集成遥感影像分类
[J].
Multiple classifiers integrated classification based on Landsat imagery
[J].
联合GF-5与GF-6卫星数据的多分类器组合亚热带树种识别
[J].
Multiple classifiers combination method for tree species identification based on GF-5 and GF-6
[J].
基于时空谱特征的墨脱县森林分类方法与实现
[J].
Forest classification for Motuo County:A method based on spatio-temporal-spectral characteristics
[J].
基于CNN的多光谱遥感图像地物覆盖分类
[J].
Multi-spectral remote sensing image classification of ground coverage based on CNN
[J].
Detailed agricultural land classification in the Brazilian cerrado based on phenological information from dense satellite image time series
[J].
DeepSat V2:Feature augmented convolutional neural nets for satellite image classification
[J].
基于高分六号宽幅影像的油菜种植分布区域提取方法
[J].
DOI:10.12082/dqxxkx.2021.210233
[本文引用: 1]

油菜作为我国主要的农业经济作物及食用油的主要来源,及时、准确地获取其种植分布信息,是全面掌握油菜种植状况、加强生产管理、优化作物种植空间格局的重要依据。高分六号(GF-6)的宽视场(Wide Field View,WFV)传感器在可见光-近红外波段基础上增设了2个红边波段、1个黄波段和1个紫波段,为油菜遥感识别提供了更加丰富的光谱信息,进而相较于蓝、绿、红、近红外4个“传统波段”的识别精度有所提升。本文以油菜开花期内两景不同时相GF-6 WFV影像拼接图像作为数据源,选择油菜生产优势区的河南省固始县为研究区,针对油菜同其他地物的“异物同谱”现象以及不同生长阶段油菜的“同物异谱”现象,利用油菜开花期独特的反射光谱特征,结合均值间标准化近距离提出了NDSI<sub>28</sub>、S<sub>34</sub>、NDSI<sub>23</sub>和NDSI<sub>46</sub>共4个光谱指数,并由此构建油菜种植区域提取的决策树模型。研究结果表明,基于4个指数组合构建的决策树模型对油菜种植分布信息的提取达到了较好的效果,总体精度为96.17%,与随机森林、支持向量机、最大似然法相比分别高出0.31%、0.88%和1.24%;制图精度方面,决策树法为98.15%,比随机森林、支持向量机、最大似然法分别高4.72%、4.21%和5.59%;对于用户精度,决策树法为86.89%,较随机森林、最大似然法分别低2.2%和1.63%,比支持向量机高0.11%。由此说明,GF-6 WFV数据中的新增波段极大地丰富了其光谱信息,使其在包括油菜在内的农作物种植分布信息提取中具有独特的优势和巨大潜力。
Extraction method of rapeseed planting distribution area based on GF-6 WFV image
[J].
基于GF-2影像和Unet模型的棉花分布识别
[J].
Recognition of cotton distribution based on GF-2 images and Unet model
[J].
Mapping sugarcane in Thailand using transfer learning,a lightweight convolutional neural network,NICFI high resolution satellite imagery and Google Earth Engine
[J].
Faster and lighter meteorological satellite image classification by a lightweight channel-dilation-concatenation net
[J].
广西典型地貌植被覆盖度随地形的变化特征
[J].
DOI:10.19692/j.issn.1006-1126.20220505
[本文引用: 1]
为了解广西植被覆盖度不同地貌下的时空演变特征及植被覆盖度与地形的关系,促进生态环境建设健康发展,利用2000 — 2018年MODIS NDVI长时间序列数据,分析广西喀斯特石山区和山地丘陵区植被覆盖度年代际时空演变特征和两地植被覆盖度随海拔、坡度和坡向变化的差异。结果表明,2000 — 2018年,广西喀斯特石山区和山地丘陵区植被覆盖度改善程度均较大;喀斯特石山区植被覆盖度增长速率为8.36%/10 a,山地丘陵区为7.81%/10 a。两地植被覆盖度随海拔、坡度和坡向的变化特征较一致,且年份差异较小。两地植被覆盖度在较低海拔区均随海拔升高而增加;不同海拔等级植被覆盖度均明显增加,喀斯特石山区增幅更大;喀斯特石山区植被覆盖度最高的海拔为600 ~ 1 000 m,山地丘陵区为1 000 ~ 1 400 m;两地植被覆盖度在海拔小于200 m时差异最大,600 ~ 1 000 m时最小。两地植被覆盖度在坡度5° ~ 10°时均随坡度增加而增加;坡度大于10°时,山地丘陵区变化更稳定。山地丘陵区不同等级坡度的植被覆盖度均高于喀斯特石山区;两地植被覆盖度在坡度15°~25°时差异最大,坡度大于25°时差异最小。两地植被覆盖度均在南坡(坡向135°~180°)最高;喀斯特石山区在西坡(坡向270°~315°)最低,山地丘陵区在西坡(坡向225°~270°)最低;两地植被覆盖度在东坡(坡向90° ~135°)差异最大,西坡(坡向225°~270°)最小。
Vegetation coverage change characteristics of typical landforms in Guangxi with topography
[J].
DOI:10.19692/j.issn.1006-1126.20220505
[本文引用: 1]
In order to understand spatial-temporal evolution characteristics of vegetation coverage in different landforms of Guangxi and relationship between vegetation coverage and topography, and promote healthy development of ecological environment construction, based on MODIS NDVI long-term series data from 2000 to 2018, decadal spatial-temporal evolution characteristics of vegetation coverage in Karst rocky area and mountain hilly area of Guangxi and differences of vegetation coverage changes with altitude, slope and aspect between two regions were analyzed. Results showed that improvement degree of vegetation coverage was greater in Karst rocky area than that in mountain hilly area, with growth rate of 8.36%/10 a in Karst rocky area and 7.81%/10 a in mountain hilly area, respectively. Change characteristics of vegetation coverage with altitude, slope and aspect in two regions were relatively consistent, and differences among years were small. Vegetation coverage in two regions increased with increase of altitude at low altitude. Vegetation coverage at different altitude levels in two regions increased significantly, and increase in Karst rocky area was greater. Altitude with the highest vegetation coverage was 600 - 1 000 m in Karst rocky area and was 1 000 - 1 400 m in mountain hilly area. Difference of vegetation coverage between two regions was the largest when altitude was less than 200 m and was the smallest when altitude was 600 - 1 000 m. Vegetation coverage of two regions increased with increase of slope at slope of 5° - 10°. When slope was greater than 10°, change of vegetation coverage in mountain hilly area was more stable. Vegetation coverage of mountain hilly area at different slope degrees were higher than those of Karst rocky area. Difference of vegetation coverage between two regions was the largest when slopes was 15° - 25° and was the smallest when slope was greater than 25°. Vegetation coverage were the highest on southern slope (135° - 180° aspect) in two regions. Vegetation coverage was the lowest on west slope (270° - 315° aspect) in Karst rocky area and was the lowest on west slope (225° - 270° aspect) in mountain hilly area. Difference of vegetation coverage between two regions was the largest on east slope (90° - 135° aspect) and was the smallest on west slope (225° - 270° aspect).
甘蔗地快速识别的样本库建设——以广西崇左为例
[J].
Construction of sample database for rapid identification of sugarcane fields:A case study of Chongzuo,Guangxi
[J].
Mapping sugarcane in complex landscapes by integrating multi-temporal Sentinel-2 images and machine learning algorithms
[J].
Estimating sugarcane yield potential using an in-season determination of normalized difference vegetative index
[J].
DOI:10.3390/s120607529
PMID:22969359
[本文引用: 1]
Estimating crop yield using remote sensing techniques has proven to be successful. However, sugarcane possesses unique characteristics; such as, a multi-year cropping cycle and plant height-limiting for midseason fertilizer application timing. Our study objective was to determine if sugarcane yield potential could be estimated using an in-season estimation of normalized difference vegetative index (NDVI). Sensor readings were taken using the GreenSeeker® handheld sensor from 2008 to 2011 in St. Gabriel and Jeanerette, LA, USA. In-season estimates of yield (INSEY) values were calculated by dividing NDVI by thermal variables. Optimum timing for estimating sugarcane yield was between 601-750 GDD. In-season estimated yield values improved the yield potential (YP) model compared to using NDVI. Generally, INSEY value showed a positive exponential relationship with yield (r(2) values 0.48 and 0.42 for cane tonnage and sugar yield, respectively). When models were separated based on canopy structure there was an increase the strength of the relationship for the erectophile varieties (r(2) 0.53 and 0.47 for cane tonnage and sugar yield, respectively); however, the model for planophile varieties weakened slightly. Results of this study indicate using an INSEY value for predicting sugarcane yield shows potential of being a valuable management tool for sugarcane producers in Louisiana.
Sugarcane yield estimates using time series analysis of spot vegetation images
[J].
Integrating Landsat-8 and sentinel-2 time series data for yield prediction of sugarcane crops at the block level
[J].
基于高分二号-NDVI的大豆遥感估产的时相选择
[J].
Time selection of estimation yield with remote sensing of soybean based on GF-2-NDVI
[J].
基于信息扩散和关键期遥感数据的冬小麦估产模型
[J].
Winter wheat yield estimation model based on information diffusion and remote sensing data at major growth stages
[J].
多植被指数组合的冬小麦遥感估产方法研究
[J].
Research on winter wheat yield estimation with the multiply remote sensing vegetation index combination
[J].
一种顾及多参数的冬小麦遥感估产方法与应用
[J].
A method of winter wheat yield estimation by considering multiple parameters andits application
[J].
1991—2020年南宁市气候变化特征分析
[J].
Characteristic analysis of climate change in Nanning from 1991 to 2020
[J].
Fully convolutional networks for semantic segmentation
[C]//
U-net:Convolutional networks for biomedical image segmentation
[M]//
BiSeNet V2:Bilateral network with guided aggregation for real-time semantic segmentation
[J].
ECA-net:Efficient channel attention for deep convolutional neural networks
[C]//
SegNet:A deep convolutional encoder-decoder architecture for image segmentation
[J].
DOI:10.1109/TPAMI.2016.2644615
PMID:28060704
[本文引用: 1]
We present a novel and practical deep fully convolutional neural network architecture for semantic pixel-wise segmentation termed SegNet. This core trainable segmentation engine consists of an encoder network, a corresponding decoder network followed by a pixel-wise classification layer. The architecture of the encoder network is topologically identical to the 13 convolutional layers in the VGG16 network [1]. The role of the decoder network is to map the low resolution encoder feature maps to full input resolution feature maps for pixel-wise classification. The novelty of SegNet lies is in the manner in which the decoder upsamples its lower resolution input feature map(s). Specifically, the decoder uses pooling indices computed in the max-pooling step of the corresponding encoder to perform non-linear upsampling. This eliminates the need for learning to upsample. The upsampled maps are sparse and are then convolved with trainable filters to produce dense feature maps. We compare our proposed architecture with the widely adopted FCN [2] and also with the well known DeepLab-LargeFOV [3], DeconvNet [4] architectures. This comparison reveals the memory versus accuracy trade-off involved in achieving good segmentation performance. SegNet was primarily motivated by scene understanding applications. Hence, it is designed to be efficient both in terms of memory and computational time during inference. It is also significantly smaller in the number of trainable parameters than other competing architectures and can be trained end-to-end using stochastic gradient descent. We also performed a controlled benchmark of SegNet and other architectures on both road scenes and SUN RGB-D indoor scene segmentation tasks. These quantitative assessments show that SegNet provides good performance with competitive inference time and most efficient inference memory-wise as compared to other architectures. We also provide a Caffe implementation of SegNet and a web demo at http://mi.eng.cam.ac.uk/projects/segnet.
Encoder-decoder with atrous separable convolution for semantic image segmentation
[C]//
BiSeNet:Bilateral segmentation network for real-time semantic segmentation
[C]//
Decision tree classifier:A detailed survey
[J].

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}