

0 引言
车载导航地图经历了数字化的发展历程,最早的车载导航采用滚轴纸质地图加汽车陀螺仪定位实现[3],导航范围仅限于纸质地图范围。导航地图进入电子地图时代后,所记录的信息更加丰富,导航电子地图数据内容主要包括道路数据、背景数据、注记数据、POI数据等基本数据。导航电子地图也经历了多代发展,从地图交互形式来看,随着3S技术与互联网技术的融合,导航地图从预置离线电子地图发展到基于云服务的在线电子地图。以高德地图、百度地图为代表的导航电子地图软件系统方案供应商,基于用户信息与互联网出行大数据,目前能够实现高频率道路采集、实时路况更新、交通拥堵规避以及其他智能化服务,极大地满足了人们的日常出行需求。
从服务对象来看,随着汽车步入智能时代,导航地图从服务人“给人看”的导航电子地图开始向服务车“给机器看”的高精地图发展。高精地图拥有亚米级的地图精度,同时在地图内容上包含实时交通信息和高级驾驶辅助系统所需的道路相关要素数据。导航服务与自动驾驶开始紧密结合,高精度地图可以为自动驾驶提供定位、感知、规划、决策等多种能力。高精地图的研究成为热点,各大地图厂商也纷纷与整车厂商合作,在高精度地图领域展开竞争。国外高精地图相关企业在自动驾驶的需求和高精地图制作实践过程中,逐步探索制定了高精地图数据规范,例如导航数据标准(navigation data standard,NDS)、OpenDRIVE等[4-5],规定了道路拓扑关系与道路相关要素表示方法。国内地图厂商以高德地图、百度地图为代表,提供基于道路数据的有路导航服务,通过传统图商、大数据、众包以及交管部门等获取测绘地理信息数据,建立覆盖全国的导航地图,实现分钟级更新,融入人们日常生活,广泛服务于交通、物流、规划等行业,已具有成熟的应用模式。
当前导航地图主要面对道路场景,称为有路导航,等级道路是车辆通行的理想环境。而陆地表面以无路区域为主,全球共有1.32亿km2的土地,其中约1.05亿没有道路覆盖[6],地球陆地表面80%属于无路区域,在野外复杂无路环境下的导航有诸多现实需求。
在战场环境下,道路类型的基础设施容易受到攻击、环境变化或自然灾害破坏,所以部队必须具备保持在结构化和非结构化环境的机动力与导航能力[7]。在2022年2月爆发的俄乌冲突中,乌克兰高速公路较少,乡间土路很多,2月份气温较低时,道路和野外地面相对硬实,有利于车辆通行; 3月份气温上升后,平原黑土区域出现大规模冻融,土地融化翻浆,导致俄军装甲部队重型车辆大规模通行困难,大量作战车辆装备被迫遗弃。
在越野自驾、越野拉力等活动中,山地、腹地、海滨、沙漠、热带雨林等少路和无路环境是主要偏好环境[8]。“十四五”时期,我国将全面进入大众旅游时代,旅游业发展处于重要战略机遇期。随着消费升级、疫情带来的出行需求变化,我国的自驾游市场快速发展,自驾线路由东向西纵深化发展延伸,精品自驾线路中有近 6 成集中在西部地区,新自驾游产品对线路安全和设计规划的需求不断增长; 随着出行环境变化与汽车出行个性化,越野自驾市场逐渐成为汽车销量增长的新蓝海,人们对于汽车越野性和导航功能的要求也在大幅提升。
在军事行动、野外考察、地质勘探、应急测绘、抢险救灾、越野自驾等场景下,交通环境以无路越野为主,空间尺度大且不具备结构化道路及先验地图[9],这些场景对导航服务仍有强烈需求。因此,将导航地图从道路拓展到道路以外场景,构建无路环境的“高精地图”,实现从有路导航到无路导航的跨越,已势在必行。本文基于无路场景下的导航服务需求,提出无路导航研究方向,阐述其内涵以及科学和技术问题。
1 无路导航
1.1 无路导航定义
无路导航(Roadless Navigation)主要研究在少路和无路环境下的环境信息遥感提取、环境建模、导航定位、路径规划、引导控制等方法,建立满足地面车辆导航需求的无路导航系统,解决现有车辆在复杂非结构化环境下“在哪里、到哪里、哪能走、怎么走”的问题,属于多学科交叉融合的综合性研究。
1.2 无路导航核心概念
几何通过性指车辆能够以足够高的平均车速通过凹凸不平地面及各种障碍的能力,受车辆几何参数、车辆动力性能、地形(坡度、坡向)、自然与人工障碍物、地表覆盖(植被、水系、居民地等)、地质条件等因素影响。
支承通过性指车辆能够以足够高的平均车速通过松软地面的能力,受车辆结构、车辆动力性能、浅地表土壤力学特性的影响。
安全通过性主指地质灾害(崩塌、滑坡、泥石流等)胁迫下以及动态威胁影响下的车辆安全通行概率,受地质灾害等影响。
导航通过性指在卫星导航信号干扰条件下,车辆自身的连续导航定位与导航控制能力仍能发挥作用的概率,受卫星导航终端的抗干扰能力和卫星导航干扰综合影响。
2 无路导航的科学问题
无路导航围绕车辆通过性信息获取,需要探测提取可靠的环境要素,在这过程中存在对应的科学问题。
2.1 地理-地质通行要素精细化遥感探测
因此地理-地质通行要素精细化遥感探测机理与方法还需进一步研究。
2.2 无路区域软地面土壤参数遥感获取
一般情况下,车辆是否发生陷车由支承通过性决定,支承通过性主要研究松软地面(土壤、沙漠、雪地、沼泽等)与行走机构(轮胎、履带)的交互特性对车辆牵引能力的影响。目前已经形成一系列地面土壤参数用于车辆与地面相互作用定量建模,被称为Bekker-Wong参数,纳入了国际地面车辆系统学会(international society for terrain-vehicle systems,ISTVS)2020年更新的标准中[22]。
2.3 天候变化对地面特性的定量影响机理
天候变化主要以影响土壤参数来间接影响通过性,天候变化对地面特性的定量影响机理是无路导航中不能忽视的科学问题。
3 无路导航关键技术
无路导航假设环境中隐含着车辆可以通过的区域,在探测提取可靠的环境要素的基础之上,还需要对通过性进行计算和表征。
3.1 车辆通过性计算与表征技术
车辆通过性作为无路导航的核心,是进行路径规划的基础。车辆通过性的确定需要满足几何通过性、支承通过性、安全通过性、导航通过性4个条件。通过对4种通过性的计算结果进行表征和综合评价,可确定车辆的通过性。
几何通过性一般考虑车辆的间隙失效,包括触头失效、顶起失效、托尾失效。几何通过性计算主要涉及车辆几何结构与地面的匹配过程,即车辆不同部位与地面的碰撞检测。
3.2 无路区域数字路网构建技术
无路区域有路化的结果是形成一张无路区域的“数字路网”,实现复杂非结构化环境的结构化,作为通过性数据的载体和路径规划的数据结构。
3.3 无路导航编队路径规划技术
4 无路导航相关技术案例分析
无路导航涉及领域和技术较多,本文提供相关案例和部分已有研究作为参考。
4.1 北约标准机动模型
北约标准机动模型(NATO reference mobility model,NRMM)发展历史悠久,集成度较高,在车辆通过性评估方面具有重要参考价值。
北约标准机动模型主要用于北约国家的车辆设计、采办和作战规划,集成了车辆动力学模型、土壤分布数据、地形参数、障碍物类型、驾驶员模型等数据和模型,利用圆锥指数等评估可通行/不可通行(Go/No-Go)区域、车辆速度分布等机动性指标[46]。20世纪70年代,美军先后提出了AMC-71,AMC-74和AMM-75等多个车辆越野机动性计算机模拟评估模型,其中AMC-74是NRMM的前身[47]。NRMM以经验和半经验模型为基础并使用较旧的数据和技术开发[48],因此2014年北约开始了下一代北约标准机动模型(Next-generation NATO reference mobility model,NG-NRMM)的研究建设,NG-NRMM的建设主要包括地理信息系统地形和机动性制图、简单地形力学、复杂地形力学、智能车辆机动性评估、不确定性处理方法研究、模型测试验证和确认等6个重点研究领域[49-50](图1)。
图1
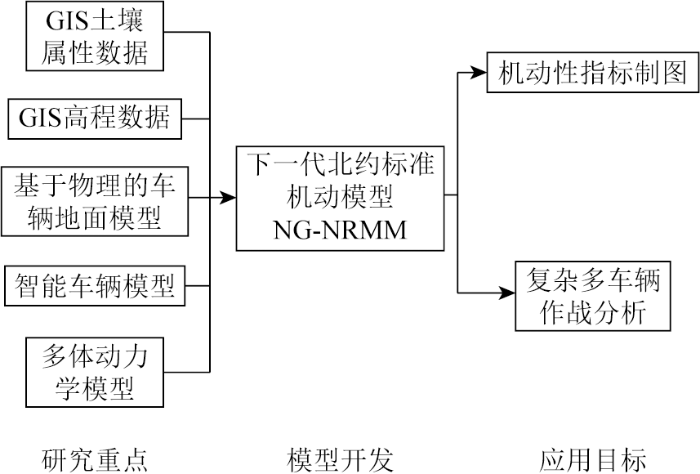
从北约标准机动模型(NRMM)及其下一代(NG-NRMM)发展趋势可以看出,北约标准机动模型从机动性评估出发积极与人工智能、遥感地理信息、数值模拟仿真等技术结合,主要涵盖了车辆的几何通过性、支承通过性的计算,同时逐渐拓展其应用范围,其发展思路和技术值得借鉴。
4.2 基于Bekker和Janosi-Hanamoto模型的车辆支承通过性计算
通过车辆地面力学仿真,可实现车辆的支承通过性计算。采用Bekker承压模型与Janosi-Hanamoto剪切模型,结合车辆多体动力学对轮胎-软土地面接触进行数值模拟(图2)。
图2
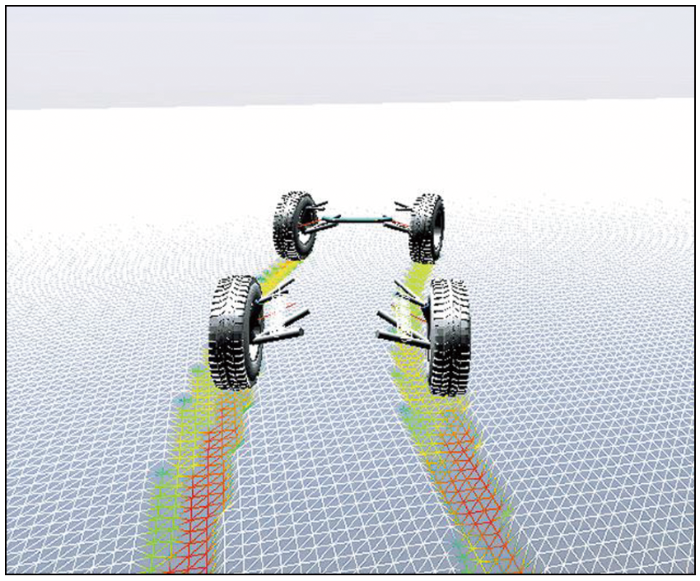
图2
基于Bekker&Janosi-Hanamoto模型的数值模拟
Fig.2
Numerical simulation based on Bekker & Janosi-Hanamoto model
模型所需的参数输入主要包括土壤的黏聚力、内摩擦角、沉陷指数、黏聚变形模量、摩擦变形模量等Bekker参数,以及库伦摩擦角、Janosi剪切系数,可以计算车辆的速度、发动机转速、发动机转矩,模拟地面下陷程度(车辙)。从初步试验可知数值模拟结果主要依赖于真实土壤参数,如果能够通过遥感手段大范围获取地面土壤参数,可有效计算支承通过性,获取车辆速度。
4.3 数字路网基础结构构建
数字路网基础结构构建是形成数字路网的第一步,本文提出数字路网基础结构构建的初步技术路线(图3)。
图3
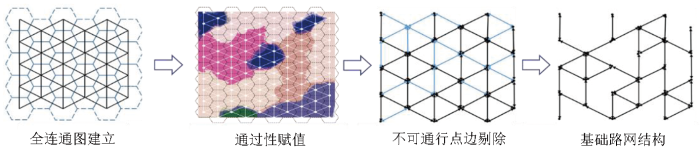
图3
数字路网基础路网结构构建技术路线
Fig.3
Technical route of digital road network infrastructure construction
在无路区域进行多尺度剖分,建立最小通行单元,以通行单元中心点为结点,以中心点连线为边,形成基础路网。结合通过性计算结果,对点和边进行赋值。对具有相同属性的边进行合并,在不可通行区域内的点和边进行删除,得到数字路网的基础结构。从图3可知,基础路网结构不满足实际驾驶与导航需求,最后需要对基础路网的形态进一步优化。
5 结论
1)在有路导航逐渐成熟的背景下,无路导航以少路或无路环境下的导航需求为牵引,将通行区域从道路拓展到道路之外,旨在实现车辆在复杂非结构化环境下的导航,是多学科交叉融合的综合性研究方向,在军事、经济、野外勘探、应急测绘、抢险救灾等方面具有广泛的应用价值。
2)通过对车辆通过性进行概念拓展,本文总结了无路导航实现过程中的3大科学问题: 地理-地质通行要素精细化遥感探测机理、无路区域软地面土壤参数遥感获取、天候变化对地面特性的定量影响机理; 以及3大关键技术: 车辆通过性计算与表征技术、无路区域数字路网构建技术、无路导航智能路径规划技术。并在北约标准机动模型的案例分析中展现了其应用效果和应用潜力,同时介绍了支撑通过性数值模拟实验、数字路网基础结构构建的技术路线,说明无路导航科学问题与关键技术的进一步研究方向。
3)有路导航走向无路导航,是复杂非结构化环境导航需求推动下的必然趋势; 无路导航是多学科交叉融合趋势下的必然产物,其实现对环境感知、环境建模、导航定位、路径规划、引导控制等能力提出了更高的要求,将极大推动相关领域研究。未来,随着无路导航系统的建立与完善,无路导航系统在军事、应急测绘等领域的应用,将增强各学科的联系,促进技术的融合与发展,进一步丰富导航的内涵,拓宽导航应用边界。
参考文献
瞻望测绘学科的发展前景——纪念《测绘学报》创刊三十周年
[J].
Looking forward to the development prospect of Surveying and Mapping—Commemorating the 30th anniversary of the publication of Journal of Surveying and Mapping
[J].
测绘遥感能为智能驾驶做什么?
[J].
DOI:10.11947/j.AGCS.2021.20210280
[本文引用: 1]

从自动驾驶汽车到智能汽车,再到智能网联汽车,智能驾驶汽车技术及产业的快速发展,测绘与遥感技术起到了重要的支撑作用。本文首先介绍了国内外智能驾驶汽车的进展及其与常规汽车的区别,基于科学技术发展3次重要浪潮的视角,对比分析和归纳了自动驾驶与测绘遥感的发展历程及其核心技术驱动力。然后从顶层规划与政策环境、环境感知与计算决策车辆关键技术、高精地图与导航定位基础支撑关键技术、车路协同信息交互关键技术4个方面,对智能驾驶汽车的关键技术进行了介绍。以星基导航增强、高精度位置和姿态测量、多源融合感知等多项导航定位先进技术成果为实例,论证了测绘导航赋能单车智能驾驶;通过介绍移动测量与众包高精地图制作技术,阐述了测绘遥感对智能驾驶的关键支撑作用;以天基信息实时服务系统(PNTRC)建设为例,描述了测绘遥感未来将服务智能网联汽车“人-车-路-云”的发展趋势。最后总结分析了智能驾驶发展尚需解决的问题以及测绘遥感近期需要应对的挑战。
What can surveying and remote sensing do for intelligent driving?
[J].
DOI:10.11947/j.AGCS.2021.20210280
[本文引用: 1]
From the automatic driving vehicle to the intelligent vehicle, and then to intelligent connected vehicle, the intelligent driving vehicle technology and industry has developed rapidly, surveying and remote sensing technology have played an important supporting role. Firstly, this paper introduces the development of intelligent vehicles at home and abroad and their differences from conventional vehicles. Based on the perspective of three important waves of scientific and technological development, this paper comparatively analyzes and summarizes the development process and core technology driving forces of autonomous driving and surveying remote sensing. The intelligent driving vehicle’s key technologies are then introduced from four aspects: top-level planning and policy environment, environment perception and computing decision-making vehicle key technology, high definition map and navigation positioning basic support key technology, and vehicle road collaborative information interaction key technology. Several advanced navigation and positioning technology achievements, such as satellite-based navigation enhancement, high precision position and attitude measurement, multi-source fusion perception, are taken as examples to demonstrate that surveying and mapping can enable intelligent driving of a single car. By introducing mobile measurement and crowdsourcing high precision map-making technology, the key supporting role of surveying and remote sensing for intelligent driving is expounded. This paper takes the construction of space-based information real-time service system as an example to describe the development trend of how surveying, mapping, and remote sensing will serve the “person vehicle road cloud” of intelligent connected vehicles in the future.Finally, the paper summarizes and analyzes the problems that need to be solved in developing intelligent (connected) vehicles and the challenges that need to be addressed in the near future.
High definition map for automated driving:Overview and analysis
[J].
全息高精度导航地图:概念及理论模型
[J].
DOI:10.12082/dqxxkx.2020.190648
[本文引用: 1]
本文提出了全息高精度导航地图的概念,它融合了多源数据,尤其是电磁传感器、声音传感器、热红外仪等传感器数据,从更多角度为导航提供信息。在此概念基础上,提出了一种融合多源数据的全息高精度导航地图理论模型框架,该框架包含4个步骤:① 全息道路数据采集,包含道路三维彩色激光点云、遥感影像、无人机航拍倾斜测量数据、摄像头图像、热红外图像、声场信号、电磁场信号;② 道路静态信息提取,从上述采集信息提取和标记得到,如车道线、路坎、栏杆、路牌、路灯、隧道等,作为无人驾驶车辆规划基础路线和车辆位置定位的数据基础;③ 道路动态信息提取,从上述采集信息提取和标记得到,如离前后车辆的距离、前方有无行人、道路施工护栏、泛在信息等,作为检测无人驾驶车辆周围的实时道路环境和规划无人驾驶车辆行驶路线的依据;④ 动、静态信息融合:融合道路静态信息和道路动态信息,丰富道路信息,提高道路线精度,提高全息高精度导航地图更新的效率,为导航和无人驾驶车辆提供地图服务。
Pan-information-based high precision navigation map:Concept and theoretical model
[J].
通用化高精地图数据模型
[J].
DOI:10.11947/j.AGCS.2021.20210254
[本文引用: 1]
高精地图逐渐成为自动驾驶不可或缺的组成部分,但是其数据模型和表达方式尚未形成统一标准,特别是在生产制作和数据交换阶段,缺乏具备通用性和大规模应用能力的数据模型。针对这一问题,本文分析了当前主流高精地图数据模型NDS、OpenDRIVE和lanelet的优缺点,提出了一种通用化的高精地图数据模型Whu map model。车道模型方面,采用车道组为数据管理单元,由同一路段上的一个或者多个车道组成。车道由车道的左边界线、右边界线、车道中心线、车道属性构成。通过多种常见车道数变化场景下的车道拓扑构建,验证了该模型在表达上的有效性和稳健性。交通标志物模型方面,定义了地面标志物和交通标志牌,分别表达形状、类型、语义以及与道路、车道的关联关系等内容。通过大规模数据制作、NDS和OpenDRIVE格式编译,以及基于ADASIS V3协议的电子地平线应用试验,验证了Whu map model模型的实用性和有效性。Whu map model可以作为通用的交换规格,也可以应用到高精地图生产制作的各个阶段,同时向下兼容、易于扩展,有助于实现高精地图数据模型标准化,从而推进高精地图的规模化生产和应用。
A generalized data model of high definition maps
[J].
DOI:10.11947/j.AGCS.2021.20210254
[本文引用: 1]
HD (high definition) maps have gradually become an indispensable part of autonomous driving, but there is no unified data model and standardize way of description, especially in the map production and data exchange stages. In response to this problem, the paper first analyzes the advantages and disadvantages of the current HD map data models such as NDS, OpenDRIVE and LaneLet, and then proposes a generalized data model for HD maps called Whu map model. In terms of the lane model, lane groups are used as data management units, which composed of one or several lanes on the same road section. And the lane is composed of the left lane divider, the right lane divider, the lane centerline, and lane attributes. Through the lane topology construction on some scenes where lane number changes, the validity and robustness of the lane model are verified. In terms of the data model of traffic facilities, the road marking model and traffic sign model are defined. The geometry, type, semantic information, and association with roads and lanes are the main contents described. Finally, through large-scale data production, compilation to NDS and OpenDRIVE format, and electronic horizon application experiments based on the ADASIS V3 protocol, the usefulness and effectiveness of the data model are verified. Whu map model can be used as a general exchange format, and can also be applied to all stages of HD map production. At the same time, it is backward compatible and easy to be extended. All of these help to realize the standardization of the HD map data model, thereby promoting the large-scale production and application of HD maps.
A global map of roadless areas and their conservation status
[J].Roads fragment landscapes and trigger human colonization and degradation of ecosystems, to the detriment of biodiversity and ecosystem functions. The planet's remaining large and ecologically important tracts of roadless areas sustain key refugia for biodiversity and provide globally relevant ecosystem services. Applying a 1-kilometer buffer to all roads, we present a global map of roadless areas and an assessment of their status, quality, and extent of coverage by protected areas. About 80% of Earth's terrestrial surface remains roadless, but this area is fragmented into ~600,000 patches, more than half of which are <1 square kilometer and only 7% of which are larger than 100 square kilometers. Global protection of ecologically valuable roadless areas is inadequate. International recognition and protection of roadless areas is urgently needed to halt their continued loss.Copyright © 2016, American Association for the Advancement of Science.
Quantitative assessment of modelling and simulation tools for autonomous navigation of military vehicles over off-road terrains
[J].
国外自驾游研究进展
[J].
Progress about the study of overseas self-driving travel
[J].
Autonomous vehicle navigation in rural environments without detailed prior maps
[C]//
军用车辆的机动性等级和模型
[J].
Mobility grade and model of military vehicles
[J].
The impact of the accuracy of terrain surface data on the navigation of off-road vehicles
[J].
西里古里走廊地区道路交通:分布特征、通行能力与地质环境
[J].
Transportation in the Siliguri Corridor,West Bengal,India:Distribution characteristics,trafficability,and geological environment
[J].
论大数据视角下的地球空间信息学的机遇与挑战
[J].
DOI:10.11959/j.issn.2096-0271.2022012
[本文引用: 1]
大数据时代已经到来,并且已经深入人类生活的方方面面。作为地球科学与信息科学交叉融合催生出的地球空间信息学,大数据时代的来临在为其提供更丰富的数据保障的同时,也带来数据存储、管理、分析和挖掘方面的新挑战,甚至造成了某种程度上的“数据爆炸”。从大数据视角,梳理了当前地球空间信息学涉及的地理信息系统、智慧城市、遥感大数据和空间数据挖掘4个核心领域的瓶颈和挑战;指出在大数据时代,地球空间信息学可为地球科学研究提供更加精准、实时的空间信息框架和更加智能高效的信息处理手段,从而服务于智慧城市、智慧地球建设和人类社会的可持续发展。而且,大数据时代下,地球空间信息学的发展面临着软件和硬件水平的双重考验。
Opportunities and challenges of geo-spatial information science from the perspective of big data
[J].
土地利用/覆被深度学习遥感分类研究综述
[J].
Review for deep learning in land use and land cover remote sensing classification
[J].
道路通行障碍物遥感检测与通过性评价
[J].
Study of remote sensing detection method for road obstacle and accessibility evaluation
[J].
基于国产卫星的遥感地质解译能力评估
[J].
Assessment of the interpretation ability of domestic satellites in geological remote sensing
[J].
基于GF-1影像的蒙古高原干旱半干旱地区自然道路提取——以蒙古国古尔班特斯苏木为例
[J].
GF-1 images-based information extraction of natural roads in arid and semi-arid regions of the Mongolian Plateau:A case study of Gurvantes Soum,Mongolia
[J].
遥感技术在中尼铁路工程地质勘察中的应用
[J].
Application of remote sensing technology to the engineering geological survey for the construction of the China-Nepal railway
[J].
青海省湟水流域地质灾害动态变化遥感监测
[J].
Remote sensing monitoring of the dynamic changes in geologic hazards in the Huangshui River Basin of Qinghai Province
[J].
植被茂密山区地质灾害遥感解译方法研究
[J].
Remote sensing interpretation method of geological hazards in lush mountainous area
[J].
基于多源数据的土壤越野通行性评估
[J].
Evaluation of soil trafficability based on multi-source data
[J].
光学与SAR遥感协同反演土壤水分研究进展
[J].
Research progress on the cooperative inversion of soil moisture using optical and SAR remote sensing
[J].
Utilizing hyperspectral remote sensing for soil gradation
[J].
Soil texture estimation using radar and optical data from sentinel-1 and sentinel-2
[J].
积雪、土壤冻融与土壤水分遥感监测研究进展
[J].
DOI:10.11873/j.issn.1004-0323.2020.6.1237
[本文引用: 1]
积雪、土壤冻融与土壤水分是陆表能量与水分以及碳交换过程研究中的重要因子,为了更好地了解积雪覆盖、雪深/雪水当量、土壤冻融状态和土壤水分等参数的遥感监测领域的发展动态,对这些参数遥感监测方法的研究进展进行了梳理,总结了利用光学与微波遥感,以及多源遥感融合的监测方法,并对该研究领域的发展趋势进行了展望。积雪、土壤冻融与土壤水分的遥感监测能力不断提升,监测算法从单一传感器向多传感器、单波段单一模式向多波段多模式集成,以及卫星虚拟星座综合观测概念的提出,均促进了现有卫星观测地表参数能力的提升;长时间序列产品的开发,对于研究和掌握全球变化大背景下对气候的响应提供了很好的数据基础;同时有助于促进遥感在水文、气象、气候、生态等领域的应用。以上的研究综述,有望对陆表水循环遥感参数反演领域,以及水循环遥感关键参数的应用领域有一定的借鉴作用。
Progress on remote sensing of snow,surface soil frozen/thaw state and soil moisture
[J].
Statistics and characteristics of permafrost and ground-ice distribution in the Northern Hemisphere
[J].
履带-地面耦合系统机理分析与建模
[J].
Mechanism analysis and modeling of track-soil coupling system
[J].
地面车辆机动性评估方法与应用
[J].
Methods and applications of ground vehicle mobility evaluation
[J].
地质灾害遥感综合监测现状与展望
[J].
Present situation and prospect of comprehensive monitoring in geological hazard by remote sensing
[J].
对地质灾害隐患早期识别相关问题的认识与思考
[J].
Understanding and consideration of related issues in early identification of potential geohazards
[J].
卫星导航干扰技术的现状及展望
[J].
Current situation and prospect of satellite navigation interference technology
[J].
卫星导航欺骗式干扰技术发展趋势综述
[J].
DOI:10.3969/j.issn.1674-5558.2022.01.002
[本文引用: 1]
在信息化条件下的导航战中,卫星导航欺骗式干扰技术比其他类型的故意干扰更具有隐蔽性与威胁性。首先,介绍了卫星导航欺骗式干扰技术的分类,即转发式欺骗干扰和生成式欺骗干扰,分别对应于增加信号传播时延或给出虚假卫星信号。然后,从针对纯卫星导航终端和针对卫星导航系统辅助的组合导航终端两个方面详细阐述了卫星导航欺骗式干扰技术的研究现状。最后,分析了卫星导航欺骗式干扰技术目前存在的科学问题,并展望了相关技术未来发展趋势。
Development trend of spoofing jamming technology for satellite navigation
[J].
DOI:10.3969/j.issn.1674-5558.2022.01.002
[本文引用: 1]
In the navigation war under the condition of informatization, the spoofing jamming technology for satellite navigation has more concealment and threat than other types of intentional jamming. Firstly, the classification of spoofing jamming technology for satellite navigation is introduced, namely repeater spoofing jamming and generated spoofing jamming, which correspond to increasing signal propagation delay or giving false satellite signals respectively. Then, the research status of spoofing jamming technology for satellite navigation is described in detail from two aspects: pure satellite navigation terminal and integrated navigation terminal assisted by satellite navigation system. Finally, the existing scientific problems of spoofing jamming technology for satellite navigation are analyzed, and the future development trend of related technologies is forecasted.
卫星导航接收机抗欺骗干扰方法研究
[J].
Anti-spoofing techniques for GNSS receiver
[J].
Forest road profile optimization using meta-heuristic techniques
[J].
Optimization of horizontal alignment geometry in road design and reconstruction
[J].
Safety performance of combinations of traffic and roadway cross-sectional design elements at straight and curved segments
[J].
移动机器人路径规划算法综述
[J].
Review of path planning for mobile robots
[J].
移动机器人路径规划算法综述
[J].
A survey of path planning algorithms for mobile robots
[J].
基于强化学习的路径规划技术综述
[J].
DOI:10.19678/j.issn.1000-3428.0060683
[本文引用: 1]
路径规划作为移动机器人自主导航的关键技术,主要是使目标对象在规定范围内找到一条从起点到终点的无碰撞安全路径。阐述基于常规方法和强化学习方法的路径规划技术,将强化学习方法主要分为基于值和基于策略两类,对比时序差分、Q-Learning等基于值的代表方法与策略梯度、模仿学习等基于策略的代表方法,并分析其融合策略和深度强化学习方法方法的发展现状。在此基础上,总结各种强化学习方法的优缺点及适用场合,同时对基于强化学习的路径规划技术的未来发展方向进行展望。
Review of path planning techniques based on reinforcement learning
[J].
DOI:10.19678/j.issn.1000-3428.0060683
[本文引用: 1]
Path planning is one of the key technologies for autonomous navigation of mobile robots.It aims at planning a collision free optimal path from the current position to the destination in real time.This paper introduces the path planning techniques that are based on Reinforcement Learning(RL) and common methods, and categorizes the methods based on RL into two types:the value-based methods and the strategy-based methods.Then the paper compares value-based representation methods(including Timing Difference(TD), Q-Learning, etc.) and the strategy-based representation methods(including Strategy Gradient(SG) and Imitation Learning(IL), etc.), and analyzes the development status of its fusion strategy and Deep Reinforcement Learning(DRL).On this basis, the paper summarizes the advantages, disadvantages and application scenarios of the RL-based methods.Finally, the future development trends of the path planning techniques based on RL are discussed.
Dynamics modeling and robotic-assist,leader-follower control of tractor convoys
[J].
Corridors-based navigation for automated vehicles convoy in off-road environments
[J].
Research progress on synergistic technologies of agricultural multi-robots
[J].
NATO reference mobility model,Edition 1,Users guide.Volume 2.Obstacle Module
[R].(
Next-generation NATO reference mobility model (NG-NRMM)
[J].
A review of mobility metrics for next generation vehicle mobility models
[J].
DOI:10.1016/j.jterra.2019.10.003
[本文引用: 1]
In the United States, the NATO Reference Mobility Model (NRMM) has been used for evaluating military ground vehicle mobility and the Vehicle Cone Index (VCI) has been selected as a mobility metric. VCI represents the minimum soil strength required for a vehicle to consistently make a specific number of passes, usually one or fifty passes. In the United Kingdom, the Mean Maximum Pressure (MMP) has been adopted as a metric for assessing military vehicle cross-country mobility. MMP is the mean value of the maxima occurring under all the wheel stations of a vehicle. Both VCI and MMP are empirically based. This paper presents a review of the basis upon which VCI and MMP were developed, as well as their applications to evaluating vehicle mobility in practice. With the progress in terramechanics and in modelling and simulation techniques in recent years, there is a growing desire to develop physics-based mobility metrics for next generation vehicle mobility models. Based on the review, criteria for selecting physics-based mobility metrics are proposed. Following these criteria, metrics for characterizing military vehicle traction limits and traversability on a given operating area are recommended. (C) 2019 ISTVS. Published by Elsevier Ltd.
The Next Generation NATO Reference mobility model development
[J].
Next-generation NATO reference mobility model complex terramechanics-part 1:Definition and literature review
[J].

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}