

0 引言
粮食安全是国家长治久安的重要保障,也是经济发展的基础之一。要确保粮食安全,及时获取农田空间分布信息是非常必要的,因为该信息在作物长势观测、农业水利调配、粮食收成预测等方面,都具有非常重要的实际应用价值。农田地区的遥感影像分类,已成为现代化粮食安全监测的基础手段[1]。然而,要在遥感影像中精准区分不同种类的作物依旧存在较大挑战,这主要是由于2方面的因素:“同谱异物”现象广泛存在于农田遥感影像中,即不同作物具有相近的遥感光谱特征,导致分类算法的混淆;“同物异谱”现象也经常出现在农田遥感影像中,这主要是由于气候变化、土壤条件、耕作活动存在局部差异,致使同类作物处于不同的生长阶段,从而给分类任务带来困难。
为解决以上难题,一个直接且重要的途径是优化机器学习分类算法的作物识别性能。目前已出现非常丰富的农田遥感影像分类算法研究,大致可以分为2类:基于传统机器学习的算法和基于深度学习的算法。虽然前者的研究更早,但近年来其相关工作也较为频繁。You等[2]利用随机森林(random forest,RF)算法与Sentinel-1/2的时序数据,进行了黑龙江主粮作物的识别研究;Hao等[3]利用美国农田分布数据对RF算法进行训练,用以区分Landsat8与Sentinel-2时序影像中的农田类别;梁继等[4]选择了支持向量机(support vector machine,SVM)算法来分析高分六号卫星影像中的2个红边波段对农作物分类精度的效果;Gao等[5]提出了一种作物生长曲线对齐方法,并将其与对象级SVM算法的核函数进行融合,并基于此开展了Sentinel-1时序影像农田分类的实验;马战林等[6]融合了Sentinel-1与Sentinel-2的时序数据,并利用超像素的RF算法,对河南省的大蒜农田进行了识别研究。
以上研究主要以RF或SVM为基础开展。尽管这类算法具有较好的分类精度与较低的使用难度,其性能依然在很大程度上受输入特征种类的影响,这使得用户需要在算法训练之前开展特征工程(feature engineering,FE)[1]。FE的效果取决于用户的经验与技术。在很多场景下,用户趋向于通过FE得到数目庞大的特征集合,以尽可能对数据进行完整表达。然而,过多的特征量易导致过拟合现象,反而降低了传统机器学习算法的性能。近年来兴起的深度学习技术,避免了FE的步骤,进而克服了相关问题。
深度学习技术利用多层次的神经网络来构建数据分析模型。网络结构的多样化决定了模型的特征提取与目标预测能力。卷积神经网络(convolutional neural network,CNN)因其优秀的影像数据处理能力,已成为深度学习在遥感影像分析领域的主流模型。Zhong等[7]将二维CNN与条件随机场结合,区分了高光谱影像中的农田作物类型;Liu等[8]比较了3种CNN在农田遥感影像分类中的性能,实验结果显示二维CNN既高效又准确;Gallo等[9]利用三维CNN对意大利伦巴第平原的当季作物进行了分类研究;Li等[10]收集了河套灌区的Sentinel-2的时序数据,对比了机器学习算法与CNN深度学习模型(包括UNet和DeepLabv3)的农田分类精度;许晴等[11]讨论了CNN模型在弱训练样本集合情况下的适用性,并在辽宁的玉米和水稻农田分类中取得了较高精度。
以上研究中,遥感影像的农田分类被构建为基于CNN的语义分割问题。目前,UNet是利用CNN进行语义分割的主流结构框架,而该模型的架构对其性能的影响是非常显著的。鉴于此,有必要开展主流UNet架构的对比分析,这对该类算法的优化与应用都具有较好的实际意义。
1 基于深度卷积网络的语义分割
1.1 UNet语义分割网络架构
图1
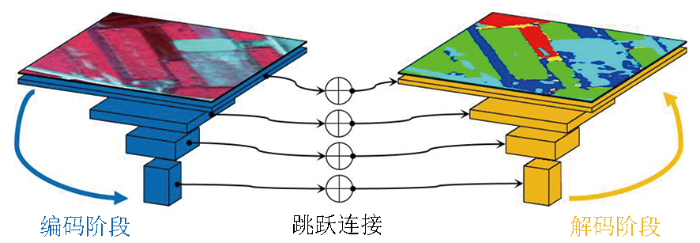
一般而言,UNet的编码器由一系列卷积与池化操作构成,其中前者负责特征的丰富化,后者则对特征进行压缩与抽象化。在本文实现的UNet中,每层编码器先进行前馈卷积、批规范化和ReLU激活函数,其输出再由最大池化操作进行空间维度的压缩。以第L层编码器为例,其输入特征的维度是(S×
UNet的解码器主要包含2个操作:张量的合并与空间维度拓展。前者首先将上一层解码器与对应层编码器的输出进行张量相加,再通过卷积操作进行进一步的特征提取;后者利用双线性插值算法对所提取的特征进行空间维度的拓展,每层解码器的空间拓展系数为2,使拓展后的特征较拓展前具有两倍的高度和宽度。
在农田遥感影像分类实验中,根据编码器与解码器的层数,本文共实现了3种基本的UNet语义分割模型,它们分别是具有4,5,6个编码阶段和解码阶段的UNet模型,下文分别将其简称为UNet_L4,UNet_L5和UNet_L6。
1.2 ResUNet网络结构
对比基础的UNet,ResUNet主要包括3点不同:在每一层的编码器与解码器中,基本的卷积操作之后具有一个多尺度残差连接模块,以进行多个尺度的特征提取;在编码器与解码器的最后一层,添加了PSPPooling[15]来开展多尺度的特征压缩;对于每一层的跳跃连接,使用了合并模块,即先对2个输入张量在特征维度上进行串联,再利用1×1卷积对串联后的特征进行维度压缩,以确保下一层解码阶段的计算。
在以上3个方面中,最重要的是多尺度残差连接模块,因为它是ResUNet最主要的特征提取环节,其结构如图2所示。其中,⊕表示张量的相加;BRC表示一个序列的操作,包含批规范化、ReLU激活层、膨胀参数为d的空洞卷积。空洞卷积能够使较大感受野的卷积保持较少的参数量;d决定了空洞卷积的感受野,较小的d注重局部信息提取,较大的d则关注大范围的空间纹理信息。根据层数的不同和是否利用PSPPooling,ResUNet的提出者定义了3种模型:6个编码层与解码层的ResUNet(下文简称为ResUNet_D6);7个编码层与解码层的ResUNet,且在最后一个的编码阶段用普通卷积替代PSPPooling(下文简称为ResUNet_D7v1);在ResUNet_D7v1的基础上,利用PSPPooling对最后一个编码层的输出进行特征提取(下文简称为ResUNet_D7v2)。ResUNet_D7v1与ResUNet_D7v2可以对比出PSPPooling模块的影响。对于不同层的编码阶段和解码阶段,d的定义如表1所示。
图2
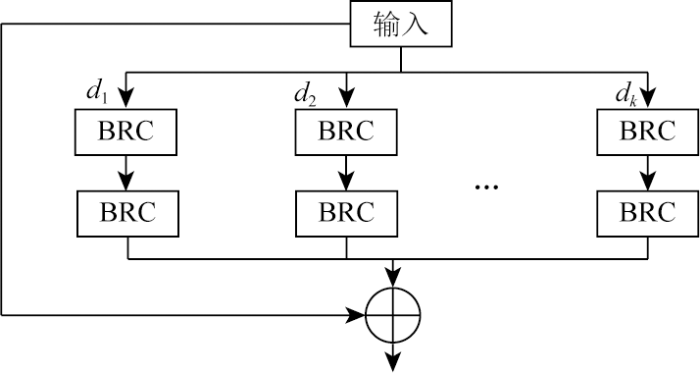
表1 ResUNet中空洞卷积的膨胀参数d的定义情况
Tab.1
| 层数 | d |
|---|---|
| 第一、二层 | {1, 3, 15, 31} |
| 第三、四层 | {1, 3, 15} |
| 第五、六、七层 | {1} |
1.3 SegNext网络结构
SegNext开创性地提出了卷积自注意力模块[14],用轻量化的多尺度卷积操作来替代Vision Transformer中的自注意力机制,以提升图像语义分割的性能。本文实现的SegNext与基本UNet的结构相似,唯一不同的是在每个编码层的基本卷积之后,利用卷积自注意力模块进行特征提取,该模块的结构由图3展示。图3中⊕和$\otimes$分别表示张量的相加与内积,C(1×d)表示卷积核大小等于1×d的深度可分离卷积。多分支的1×d与d×1卷积操作用于进行多尺度特征提取;这种垂直与水平方向的条形卷积核,可在保持较少参数量的前提下得到感受野相当于d×d的效果;此外,条形卷积核有助于线状地物的特征提取,例如道路边缘、农田田垄、分支渠道等。深度可分离卷积的使用,进一步降低了参数量,从而减少过拟合风险。
图3

图3
SegNext中的多尺度卷积自注意力模块
Fig.3
Multi-scale convolutional self-attention module in SegNext
本文共构建了3种SegNext网络,分别是具有4,5,6层编码器与解码器的模型,下文分别将其简称为:SegNext_L4,SegNext_L5,SegNext_L6。对于SegNext中的多分支结构,d参数的设定遵循了原始SegNext中的定义:{7, 11, 21}。
1.4 损失函数与模型训练
要训练类似UNet的深度CNN模型,目前主要采用的损失函数包括Cross-Entropy函数和Dice系数函数2种。前者在场景分类中的应用更为广泛,而后者在与语义分割相近的任务中得到了越来越多的关注。Diakogiannis等[13]在ResUNet的训练中提出了一种互补的Dice损失函数,可加快语义分割训练的收敛速度。鉴于此,本文采用该方法来构建损失函数,其基本形式为:
式中:p和t分别为预测概率值向量与实际地物真值向量;pi,k和ti,k分别为第i个像素对于第k个类别的预测概率与真值标签,前者可以在[0,1]范围内连续取值,而后者的取值是0或1;C为类别个数;N为输入影像的像素总数;nk为第k个类别的样本数目,其在式(1)中的作用是降低不同类别样本数目差异对训练的影响。
每个模型的训练过程都包含了100个Epoch,且数据的batch size参数设置为4。本文采用了Adam算法进行模型参数优化,其β1,β2与权重衰减率参数分别设置为0.9,0.999,1E-3。本文采用了multi-step learning rate的训练策略,使learning rate参数在前50与后50个Epoch的大小分别等于1E-4和1E-5,以微调模型在后半阶段的训练效果。本文所采用的模型都是在PyTorch框架下实现的,实验平台配置为:Intel i7 12700H CPU@2.3 GHz,RTX3060移动版GPU(6 GB显存),16 GB内存,Windows11操作系统。所有模型输入张量的空间维度是256×256。
2 数据集与实验设置
2.1 数据集
本文采用的高分辨率遥感影像由WorldView-2获取,空间分辨率为0.5 m,包含近红外、红光、绿光、蓝光4个波段。影像成像时间为2017年8月5日,中心经纬度为N41.010°,E108.155°,尺寸为4 608像素×3 072像素。
本文的研究区域位于内蒙古巴彦淖尔市的五原县,该县涵盖了河套灌区中部腹地,且盛产玉米、葵花、小麦等经济作物。图4为遥感影像数据与样本数据。
图4
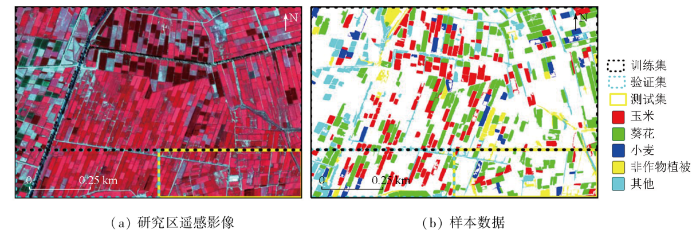
本文的样本数据包括5个地物类别:玉米、葵花、小麦、非作物植被、其他。本文的样本收集由3个步骤完成:
1)实地调查。通过实地踏勘,在研究区获取少量典型地物的位置信息(经纬度)。
2)目视解译。根据经纬度信息,将步骤1)得到的样本在遥感影像中进行匹配,为目视解译提供典型样例。
3)样本扩充。在步骤2)的基础上,在全景影像中进行样本标注,这一步首先利用了多尺度分割技术[16]来自动化地获取农田地块,使斑块成为样本选择的操作单元,该做法可显著提升农田地块级样本的标注效率。
要完成算法的精度对比,需要将所有数据划分为训练集、验证集、测试集,图4显示了3个数据集的空间范围。验证集、测试集分别用于算法训练的超参数调试与不同算法的精度对比,其中精度的计算标准采用的是总精度(overall accuracy,OA)和Kappa系数(Kappa coefficient,KC)。
2.2 实验设置
为了充分对比3类深度卷积网络在农田地区语义分割上的性能,本文设计了3方面的实验:算法精度对比分析、训练与过拟合风险分析以用运算效率分析。实验1主要对比各个算法在精度上的差异,包括OA和KC,以及描述特定类别区分效果的生产者精度(producer accuracy,PA)与用户精度(user accuracy,UA);实验2主要考察不同算法在训练过程上的表现,通过对比训练集与测试集上的精度变化,来分析过拟合现象的程度;实验3对不同网络的运算效率进行了对比,所采用的标准是算法参数量与每秒十亿级浮点操作量(giga-floating point operations,GFLOPs),2个标准的规律均为:值越大,表示模型复杂度越高,对应其计算效率越低。
3 实验结果
3.1 算法精度对比
图5展示了各个算法在测试集上的精度变化。根据图5(a)和(b),精度最高的模型为UNet_6L,其OA和KC分别是88.74%和0.836 0;精度最差的是SegNext_L6,OA和KC分别为84.33%和0.769 3。对于UNet与ResUNet,模型复杂度的增加均使其精度提升;然而,对于SegNext,虽然其5层的精度优于4层,但是6层的精度却出现了明显下降。此外,对于相同层数的UNet与SegNext,前者的精度均好于后者。这主要是因为SegNext在其卷积自注意力模块中采用的是线状卷积核,而在农田地区里,线状地物较少,而主要地物(农田地块)大多为矩形块状,从而导致其编码器在特征提取能力方面的不适性,进而影响精度。
图5
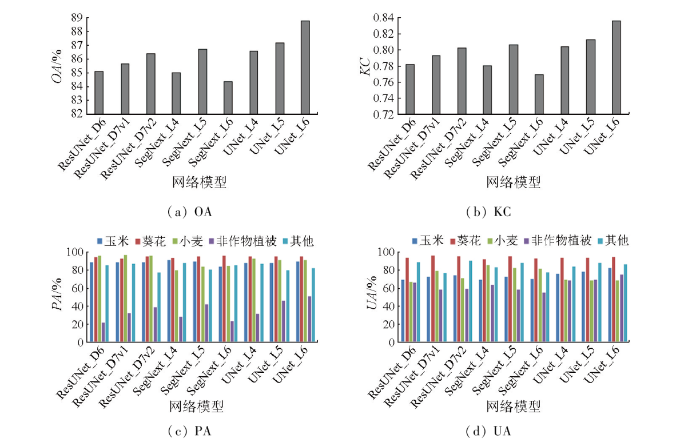
图5
各个深度卷积语义分割网络算法的精度对比
Fig.5
Accuracy comparison for different deep convolutional semantic segmentation networks
图5(c)和(d)展现了各个类别的精度变化。较为明显的是,对于非作物植被,所有算法在PA与UA方面都得到了较低的分值。UNet_L6在非作物植被的PA与UA表现最佳,其值分别是52.60%与76.70%;最差的非作物植被PA由ResUNet_D6得到,为22.73%,而该类别最低的UA是SegNext_L6的56.77%。以上结果说明,9种算法的主要错误均来源于非作物植被,换言之,该类地物均在不同程度上被各个算法错分为其他类别的地物。值得一提的是,对于所有算法,葵花的UA都明显高于其他类别,特别是玉米和小麦。根据以上结果可以推论:大多非农田植被主要被错分为玉米或小麦。该结论与对影像的目视是相符的,因为大部分非作物植被包括田间林地、路旁树木,以及荒地杂草,前两者在光谱上与玉米相近,而后者的光谱与小麦地块类似。
图6-1
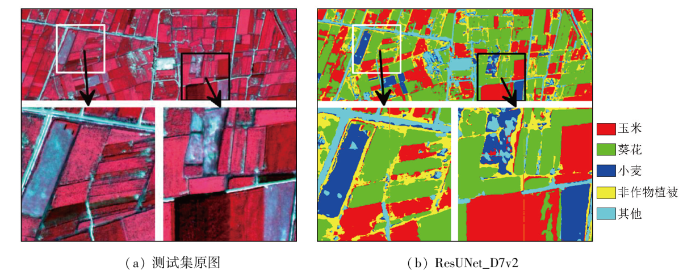
图6-1
3类算法对测试集的最优分类结果
Fig.6-1
The optimal classification results for the 3 types of algorithms
图6-2
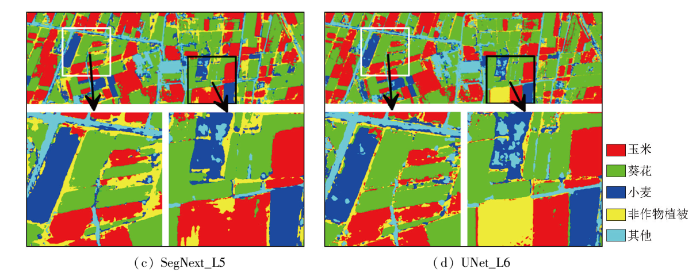
图6-2
3类算法对测试集的最优分类结果
Fig.6-2
The optimal classification results for the 3 types of algorithms
在黑色方框区域西南部,存在一片较大的林地,只有UNet_6L将其正确识别,另2种算法都将其划分为玉米。以上分析说明,本文所采用的3类深度卷积语义分割网络,在农田遥感影像的地物区分中能够取得较好的效果,但对一些光谱相似的地物发生了错分现象。
3.2 训练与过拟合风险分析
为了分析9种算法在训练过程中的性能变化,计算了所有模型对于训练集和测试集的OA,其结果由图7展示。
图7
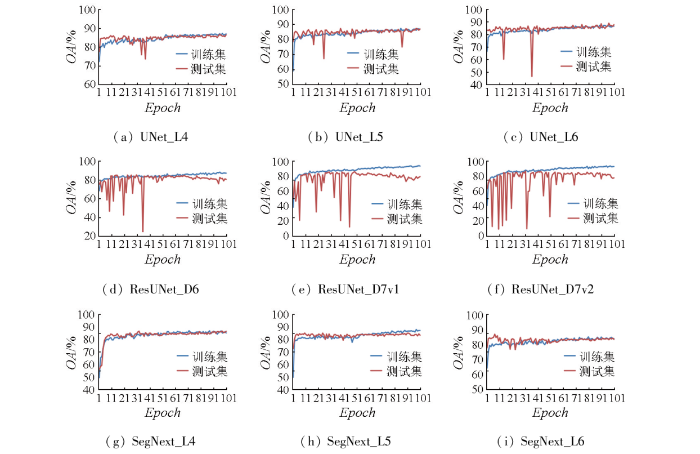
图7
9种深度卷积语义分割网络在训练过程中的总精度变化
Fig.7
The variation of overall accuracy for the 9 deep convolutional semantic segmentation networks during training
对于训练集的OA,所有模型均表现出了相似的规律:随着Epoch增加,OA先迅速上升(当Epoch<10时),此后OA缓慢提高或趋于平稳。对于测试集的OA,3类算法较为不同,尤其是ResUNet,其3种模型都在Epoch<50时出现了非常大的波动;而随着Epoch>70,其OA甚至出现了小幅下降,但此时其训练集的OA依旧处于平稳上升的态势,可见ResUNet对本文数据集出现了明显的过拟合现象。
虽然SegNext与UNet的训练集和测试集的OA较ResUNet更为一致,但3种SegNext模型的测试集OA的波动更小。尽管SegNext_6L在训练初始几轮的Epoch出现了明显抖动,但在后半段的训练过程中,其训练集与测试集OA的相符程度很高。对于3种UNet,其测试集OA都出现了一定程度的波动,但都显著少于ResUNet。此外,当Epoch>70时,相较于另外2类模型,UNet的测试集OA的上升趋势更为明显,特别是UNet_6L,其测试集OA在Epoch>90时是所有算法中最高的。
以上分析说明,对于本文采用的农田地区高分辨率遥感影像的分类问题,ResUNet的过拟合风险最高,虽然SegNext的表现最为平稳,但其最优精度低于UNet。
3.3 运算效率分析
深度学习网络模型的运算效率主要由2个方面体现:参数量与计算量,其中后者的主流量化标准是GFLOPs。GFLOPs可用于反映不同GPU的算力性能,也可用于衡量同一GPU在处理不同网络训练训练或预测时的计算量,计算量越多对应了越高的参数量。参数量反映了模型的复杂程度:一般而言,越复杂的模型对应越高的参数量。
图8展示了9种语义分割模型的运算效率对比情况,可见3类算法都在模型复杂度增加的情况下,出现了效率降低(对应参数量与计算量的增加)的现象。SegNext_L4的计算效率是最高的,而计算效率最低的模型是ResUNet_D7v2。对于在本文实验中取得最佳测试集精度的UNet_L6,其模型复杂度仅低于3种ResUNet,计算效率也是除ResUNet之外最低的,但是其计算效率与SegNext和另外2种UNet相差不大。另外,在层数相同的前提下,UNet在参数量上略微高于SegNext(见图8(a));一般而言,虽然过多的参数量会导致更高的过拟合风险,但也能产生更强大的特征提取能力,这可能也是同层数下UNet的精度高于SegNext的原因。
图8
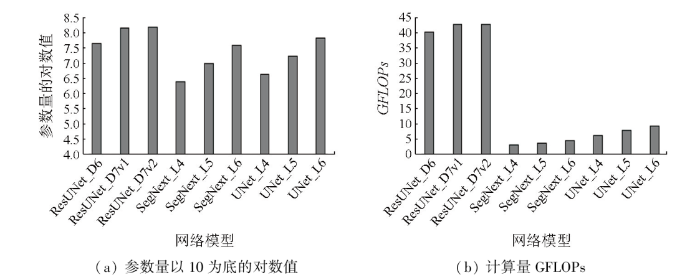
图8
9种深度卷积语义分割网络的参数量与计算量对比
Fig.8
Comparison of 9 deep convolutional semantic segmentation networks for the parameter size and computational load
4 结论
本文主要对比了3类深度卷积语义分割网络在农田地区遥感影像中的应用效果。通过在预测精度、训练过程与计算效率3个方面的实验分析,得出结论如下。
1)虽然ResUNet具有最高的模型复杂度,但在本文的数据集中出现了明显的过拟合现象。
2)SegNext在训练过程中得到的模型具有平稳的性能表现,但其最优精度低于UNet。
3)UNet_L6取得了最高的测试集精度,说明对于本文所采用的农田遥感影像的分类,其适用度相对最佳。
在未来的工作中,有必要在其他场景(例如遥感影像的建筑提取或变化监测)对本文所采用的9种模型进行对比研究。此外,在本文实验结论的基础上,可以发展其他网络模型,以进一步优化农田地区遥感影像分类的精度。
参考文献
Review on convolutional neural networks (CNN) in vegetation remote sensing
[J].
Examining earliest identifiable timing of crops using all available Sentinel 1/2 imagery and Google Earth Engine
[J].
Transfer learning for crop classification with cropland data layer data (CDL) as training samples
[J].
高分六号红边特征的农作物识别与评估
[J].
Crop recognition and evaluationusing red edge features of GF-6 satellite
[J].
A novel crop classification method based on ppfSVM classifier with time-series alignment kernel from dual-polarization SAR datasets
[J].
基于主被动遥感数据和面向对象的大蒜识别
[J].
Identification of garlic based on active and passive remote sensing data and object-oriented technology
[J].
WHU-Hi:UAV-borne hyperspectral with high spatial resolution (H2) benchmark datasets and classifier for precise crop identification based on deep convolutional neural network with CRF
[J].
Crop mapping using sentinel full-year dual-polarized SAR data and a CPU-optimized convolutional neural network with two sampling strategies
[J].
In-season and dynamic crop mapping using 3D convolution neural networks and sentinel-2 time series
[J].
Crop type mapping using time-series Sentinel-2 imagery and U-Net in early growth periods in the Hetao irrigation district in China
[J].
深度学习农作物分类的弱样本适用性
[J].
Applicability of weak samples to deep learning crop classification
[J].
U-net:Convolutional networks for biomedical image segmentation
[J/OL].
ResUNet-a:A deep learning framework for semantic segmentation of remotely sensed data
[J].
SegNext:Rethinking convolutional attention design for semantic segmentation
[J/OL].
Road extraction by deep residual U-net
[J/OL].
Multiresolution segmentation:An optimization approach for high quality multi-scale image segmentation
[C]//

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}