

0 引言
激光雷达是近年来发展十分迅速的一种主动遥感技术,具有高空间分辨率、高精度和强穿透性,能提供扫描对象的精确三维几何结构信息,相较于光学摄影测量,在三维重建上具有无可比拟的优势[3]。由于激光雷达获取的点云数据量庞大,海量点云数据的处理、三维重建算法的选择和优化将直接影响整个重建的效率和精度。目前,伴随着计算机视觉算法和计算机图形学方法的不断发展完善,树木枝叶分离算法日渐成熟,激光雷达三维点云数据已经可以实现对实体树木进行三维仿真和器官重建,进而对树木进行三维建模。这将对森林碳汇经营、林业生态管理、智慧农林、虚拟现实和元宇宙等领域都具有重要价值和意义。
利用地面激光雷达点云数据进行单木三维重建,特别是在树木枝干重建方面,目前已有一些比较成熟的算法[4]。Cheng等[5]利用地基激光雷达单站数据,结合深度图像法建立了树木枝干和树枝的三维模型,但是单站数据由于扫描角度有限,得到的点云数据会因为在激光雷达扫描过程中受木质组分遮挡而产生较大的空隙和孔洞,并且单站扫描点云空间分辨率较低,无法有效地对叶片进行建模; 苏中花[6]通过多站扫描地基激光雷达对树木进行了主干建模和局部单片叶片建模,但存在建模效率低、细小枝干建模不完整、无法有效建模出冠层内所有的叶簇等问题。同时,在建模过程中,由于叶簇聚集的问题,还会在建立叶簇模型时无法排除叶簇之间的空隙,导致叶簇体积增大、形状失真等问题,无法实现对树木的高还原度数字孪生建模。
针对上述存在问题和不足,本文提出了一种基于地基激光雷达点云的树木三维建模方法。基于超高空间分辨率的多站式地基激光扫描技术,结合形态学和图形学的方法,通过对叶片和枝干进行聚类分离提取和算法建模,从而实现单棵树木数字孪生,对树木的叶片和细小枝干均建立高还原度的模型,解决树木结构不真实、器官建模不精细等问题。
1 研究方法
图1
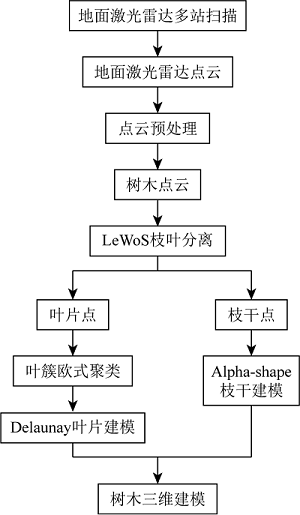
1.1 TLS多站扫描
本次选择Leica Scan Station C10地基激光雷达扫描仪对一株香樟树进行点云样例数据采集获取。考虑到树木的叶片与枝干存在聚集、遮挡等复杂因素,为了更全面、精确地获得该树木的三维点云数据,尽量在晴朗无风的条件下设立3个独立站点对被测树木进行环绕扫描和标靶定标采集,其中3个相邻站点之间的夹角为120°。
由于在激光雷达扫描过程中,重叠的叶片和树木的木质组分会对激光有一定的遮挡效应,因此采用多站式扫描,尽量减少由于遮挡效应造成的树木点云数据的缺失[8]。多站扫描时各站点架设沿待扫描对象尽量均匀分布。在对物体进行多站扫描之后,通过站点之间的位置标定对各站数据进行拼接,得到完整的地基激光雷达扫描点云数据。
1.2 点云预处理
1.3 枝叶分离
由于树木的枝干和叶片具有不同的几何形态和生物特征,而且提取的树木点云数据只有坐标和强度信息,因此需要通过枝叶分离的方法对其进行类别判别,进而分类确定原始点云中的叶片点和木质组分点。对于地基激光雷达点云数据而言,由于其穿透性较好、空间分辨率高等特点,枝干的轮廓细节获取完整,相较于叶片而言,枝干几何形状明显,便于提取。本次采用开源LeWoS模型算法进行树木的枝叶分离,该模型是一种基于点云网络递归分割和分类正则化的方法,只需要输入一个参数,即可高效、精确地完成枝干提取工作[11]。基于获取的点云数据无监督完成树木枝干和叶片点云分类,从而得到单棵树木的枝干点和叶片点。
2 树木建模
根据树木点云预处理后得到的叶片和枝干点云分别进行建模,枝叶建模主要开发环境为MATLAB 2020B和Dev-C++ 5.11,编程语言为MATLAB和C++。
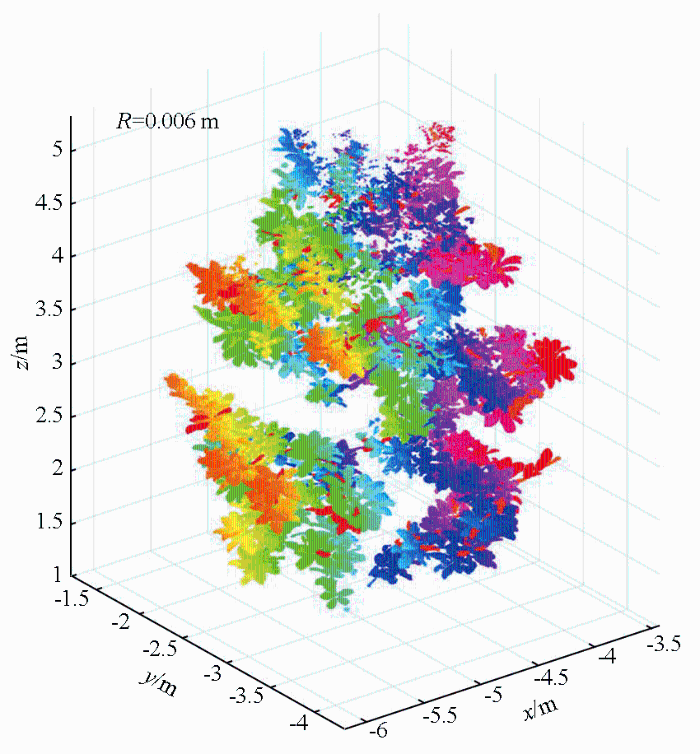
2.1 叶簇聚类
由于叶簇之间存在聚集,如果直接对提取出来的叶片点云进行建模,可能会造成不同的叶片点被归为同一叶片点。因此,本文先将叶片点云基于欧氏距离聚类成多个叶簇,然后再对各个叶簇进行建模,从而规避叶片建模混乱的问题。
首先利用欧氏距离进行点云聚类,这是一种基于欧氏距离度量的聚类算法,可以将其应用于测绘领域中点云数据的分割[12]。首先计算点云数据中两点之间的欧氏距离,将距离小于指定阈值作为分为一类的判定准则; 然后迭代计算,直至所有的类间距大于指定阈值,完成欧氏聚类分割。
由于叶片卷曲局部较为扁平,因此本文采用Delaunay三角网对各个叶簇建模。在建立Delaunay三角网时采用Lawson逐点插入法,具体实施方法步骤如下:
1)将叶片点云中拥有相同叶簇类别编号的点组成的点集称为一个叶簇。对叶簇clusteri建立一个一一对应的三角形凸包Trii,其中i为叶簇序号。
2)对于三角形凸包Trii,向其内部插入clusteri中的一点,令插入的点与它所在的三角形的3个顶点相连,进而生成3个新的三角形。然后对新生成的3个三角形分别做外接圆,如果三角形的外接圆内不包含已经生成的三角形的顶点,则认为新生成的三角形为Delaunay三角网的一部分; 如果三角形的外接圆内包含了已经生成的三角形的顶点,则删去该顶点和新生成的3个三角形。
3)在clusteri选取之前未插入的点,重复步骤2),直至遍历完clusteri内的所有点,意味着该叶簇的Delaunay三角网模型建立完成。
4)重复以上步骤1)—3)直至所有叶簇被遍历,完成每个叶簇的模型建立,从而得到叶簇点集聚类结果。如图2所示,R=0.006 m为欧式聚类分割距离阈值。
图2
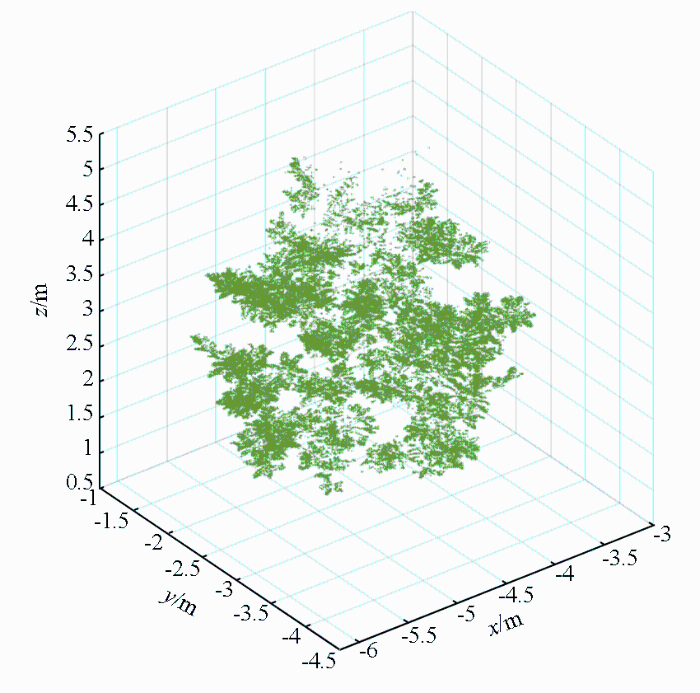
2.2 叶片建模
根据得到的叶簇点集,基于Delaunay三角网构建各叶片模型,具体实施步骤为:
1)初始化叶片点云的叶簇类别编号,令所有叶片点云的叶簇类别编号为0。
2)取叶片点云中的任意一点P,记其叶簇类别编号为Kn,K1=1,Kn=n; 以P为中心点,在叶片点云中搜索与P的距离R小于固定阈值Rth的点,归入点集Kn,n为自然数,从1依次取值; Rth取值一般为5~300 mm,叶片分布密度不变的情况下,叶片尺寸越大,Rth越大。P和非P点之间的距离R计算公式为:
式中: (x,y,z)为点P的坐标; (xt,yt,zt)为非P点的坐标。遍历点集Kn内的所有点,在叶片点云中搜索是否存在一点T,使得点集Kn内存在一点G与点T之间的距离R小于固定阈值Rth,如果存在,则将T归入点集Kn,并再次重复上述步骤,搜索可以被并入点集Kn的点; 如果不存在,则意味着点集Kn内的所有点被找到。
3)循环以上步骤遍历K1~Kn以外的剩余叶片点云,直至叶片点云中不存在叶簇类别编号为0的点。然后,对欧氏距离聚类后的叶片点云的各个叶簇进行基于Delaunay三角网的模型构建,并累加各个叶簇的模型,得到单棵树木叶片模型,结果如图3所示。
图3
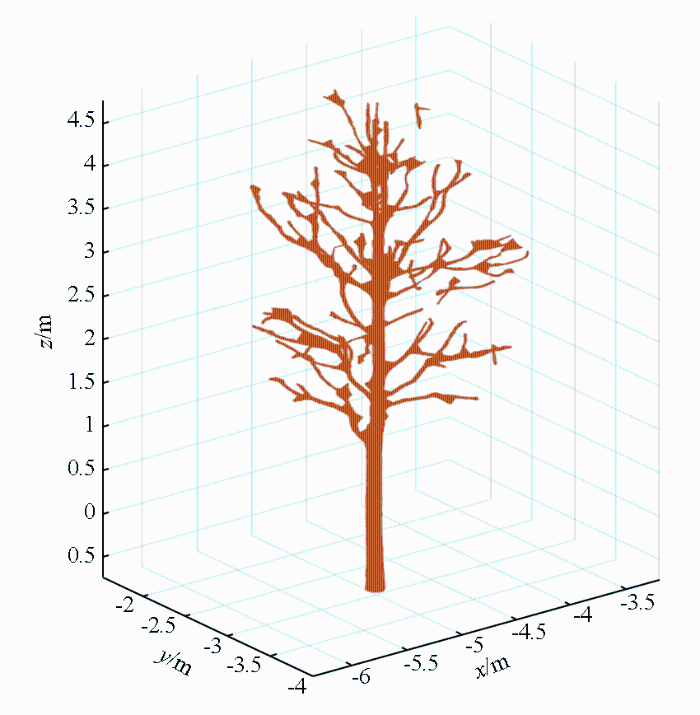
2.3 枝干建模
由于枝干点卷曲程度较高,且在实际情况中会由于扫描角度、遮挡间隙等问题造成枝干表面点密度分布不均匀,因此本文采用对间隙更为包容的Alpha-shape算法进行枝干建模。Alpha-shape是一种提取边界点的算法,通过控制参数a的大小,对树冠进行三维模型重建。一般参数a越小,结果越精确,但当减少到一定值时,重建结果不完整,无法形成树木枝干模型[13]。
Alpha-shape算法本质为滚球法,通常用于点云轮廓提取或三维重建,通过控制不同半径的滚球,求取包络,确定整个点集的表面[14],其算法实现具体方法如下:
在先前枝叶分离的枝干点集中抽取任意不在一条直线上的3个点,记为M,N,Q。在三维空间中过点M,N,Q可以生成2个半径大小为r的球体,分别记为Spherea和Sphereb。
如果在Spherea和Sphereb中存在一球体,该球体内部不包含枝干点集内的任何点,那么则判定这3个点组成的表面为枝干模型多面体的一个表面,并将其记为建模模型的一个表面。如果上述情况不存在,则由M,N,Q 3点组成的表面不为建模模型的表面。通过程序遍历枝干点集内的所有点的组合,基于Alpha-shape算法完成枝干模型的表面重构,得到实例枝干三维重建模型如图4所示。
图4
2.4 枝叶融合
最后,将得到的叶片和枝干模型进行修饰整理和集成融合,并根据实际需求赋予各自的标签和属性,即完成对整棵树木的数字孪生三维建模(图5)。
图5

同时还可以将建立的三维模型导出dxf,dae,obj,fbx等其他常用三维模型格式,集成加载到其他三维可视化平台中作为实景三维和数字孪生三维部件模型共享交换使用[15]。
3 讨论与结论
3.1 讨论
本研究根据地基激光雷达点云数据特征,充分考虑了地基激光雷达实际扫描时枝干遮挡、叶片聚集等问题,结合叶片和枝干的形态特征,采用多基站地面激光雷达扫描对一棵香樟树进行有效点云数据采集,然后运用Alpha-shape和Delaunay三角网算法做叶片和枝干模型拟合,有效克服了现有树木数字建模细节不全、枝干构建不真实等问题。结合树木三维建模模型效果与实际现场树木进行目视比对,不难发现其模型存在树木结构更加完善,细节更加逼真等优势,初步实现了树木数字孪生,具有高精度、高还原度的技术效果。
目前,虽然该方法在一定程度上实现了树木的三维建模,也达到了预期的效果,但由于树木结构的生态复杂多样性和相邻树木遮挡等因素,仍有许多方向和问题值得进一步探索和研究。例如在面对复杂细小灌木的单木分割和细节尺度问题、面对高大乔木的有效激光扫描距离等问题时都还需要进一步结合其他手段和方式才能很好地解决。而且,在实际使用该方法过程中特别需要注意保证地面激光雷达扫描的有效距离、点云密度和多架站方位配准等问题,尽量选择在周边遮挡条件好、便于仪器架设、光线充足而且同名匹配点多的情况下进行数据采集。
3.2 结论与展望
本次树木点云三维重建的方法虽然实现了树木三维形态机构的重建,但容易忽视局部树木表面纹理和细节等问题。同时,在重建的过程中,还面临激光雷达数据量大,处理流程多,建模算法复杂度高、运行效率低等问题,还需要后期继续深入研究。尽管地基激光雷达能够获取单棵树木令人满意的三维建模结果,但是对于森林调查进行大范围推广显然不太现实。近年来,随着激光雷达遥感技术的发展和实景三维行业应用需求的引导,基于多平台激光雷达点云数据的单木分割和枝叶分离算法研究都将是树木三维建模的关键技术支撑。由于其在点云密度、扫描方式、数据来源和数据处理等方面都存在差异,所以如何借用多手段多平台相互补充综合高效解决树木三维建模数字孪生势必将是一个重要的研究内容和方向。
参考文献
基于地面激光雷达点云数据的单木三维建模综述
[J].
Tree geometrical 3D modeling from terrestrial laser scanned point clouds:A review
[J].
基于地面激光雷达的活立木枝干三维建模
[J].
DOI:10.3969/j.issn.1000-2006.2015.04.028
[本文引用: 1]

活立木点云数据三维重建的难点是测量数据海量且庞杂散乱。就单株活立木个体样本而言,树木主干几何形状极其不规整,枝叶分生散乱,由地面激光雷达扫描得到的树干实测数据非常庞杂散乱。笔者提出了一种新的基于骨架提取的活立木枝干三维建模方法:首先,对地面激光雷达扫描获得的原始点云进行枝叶分离; 然后根据Dijkstra距离对枝干点云数据进行分段并提取每个连通部分的骨架; 再根据加权的匹配度连接骨架,得到整株活立木完整的骨架; 最后用圆柱体拟合出活立木枝干的模型。分别对含笑树和樱花树枝干进行了扫描分析,拟合出含笑树和樱花树的枝干三维模型,并对该算法的效率进行了分析。结果表明,此次研究所用方法在运行时间和占用内存上都优于以往其他方法。
A new 3D modeling method for branches of standing trees based on point cloud data of terrestrial laser scanning
[J].
基于地面激光点云数据的单木三维重建方法
[J].
DOI:10.12302/j.issn.1000-2006.202006016
[本文引用: 1]
目的 使用地面三维点云数据,提出一种单株树木三维网格模型重建方法,为精准获取测树因子提供技术支撑。 方法 对获取的点云进行预处理,使用k-d树构建近邻关系图,用Dijkstra算法求算出子图的根。检测出有效路径后,使用探测半径计算关键路径。计算树枝骨架,然后对初始骨架进行Bezier曲线半径平滑,得到平滑的骨架,再将骨架连接,使用半径平滑和圆柱拟合减少点云密度小造成的拟合不足的情况,能够最大限度保留树枝的细节。结果 使用3株落叶松点云数据构建了树枝树干表面网格模型,重建了树木三维结构。将树干、树枝的三维网格模型与点云匹配后,效果较好;所构建的模型能够进行细小枝条的重建,而不是模拟细枝,通过观察重建结果,一级枝的重建效果非常好,大的二级枝也能得到很好的展示;整套算法计算快速,计算时间与枝条的复杂程度、连接关系有关。结论 基于关键路径探测的方法能够很好地构建树木的三维网格模型,可以用于单株树木测树因子的精确提取。
Methodology of individual tree 3D reconstruction based on terrestrial laser scanning point cloud data
[J].
基于地面激光雷达点云数据的单木三维重建
[J].
DOI:10.11873/j.issn.1004-0323.2015.3.0455
[本文引用: 1]
利用地面激光雷达三维点云数据,在已有的枝干结构重建方法基础上,提出了一种利用点云密度,结合间隙率模型反演的单木总叶面积,在冠层内分体元添加树叶的方法,重建完整的单木三维结构。该方法成功应用于基于光线追踪方法模拟的点云和野外实测点云数据,实现了单木三维结构重构。重建的单木叶面积与真实叶面积相对误差小于0.9%,方向间隙率的相对误差不超过4.0%。实验结果表明:重建单木三维结构与真实结构在目视效果和定量评价两方面都具有较好的一致性。
3D reconstruction of a single tree from terrestrial laser scanner data
[J].
Simple reconstruction of tree branches from a single range image
[J].
基于激光雷达点云数据的单木建模综述
[J].
Overview of single tree modeling based on LiDAR point clouds data
[J].
定量结构模型的地面激光雷达单木分割应用
[J].
Application of quantitative structure model in TLS single wood segmentation
[J].
基于地基激光雷达的单木森林参数提取分析
[J].
Extraction and analysis of forest parameters for individual tree based on terrestrial laser scanning
[J].
基于网络图的地基激光雷达复杂树木点云枝叶分离方法
[J].
DOI:10.11873/j.issn.1004-0323.2022.1.0161
[本文引用: 1]
地基激光雷达树木点云数据的枝叶分离是精确计算地上生物量和叶面积指数的重要前提,也是树木三维建模的重要步骤。然而,山地复杂树木冠幅大且结构复杂,从而造成树叶与枝干之间的相互遮挡,因此很难获取高质量的点云数据,目前对其实现枝叶分离依然存在较大的困难。利用地基激光雷达FARO Focus<sup>3D</sup> X330获取三维激光点云数据,提出了一种基于网络图的树木点云枝叶分离方法。首先,采用LeWos模型对点云进行初步的枝叶分离,分离出枝干和叶片点云。在此基础上,针对枝干和叶片混合点云通过路径追踪检测算法来精细分离枝干和叶片。随着路径长度从10增加到100,枝干点不断增加,叶片点不断减少,枝叶分离精确度、枝干F分数、叶片F分数、Kappa系数均先增加后减少。综合这4项精度评价指标,选取各个树木最优路径长度执行路径追踪检测算法。通过与LeWos模型、Tlseparation模型和高斯混合模型等主流枝叶分离方法比较发现,该方法精度更优,精确度为91.97%。而且,该方法的枝干F分数和叶片F分数均大于85%,这表明该方法具有很好的平衡性。该方法仅使用路径长度,不考虑几何特征,因此极大地提高了针叶树木的枝叶分离精度。同时,该方法对不同树种、不同密度点云枝叶分离效果均较好,鲁棒性强。精确的树木点云枝叶分离对森林资源管理和生物多样性研究等具有重要意义。
A method for separating leaf and wood components of complex tree point cloud data based on network graph with terrestrial laser scanning
[J].
基于车载点云数据的树木提取与分析
[J].
DOI:10.13474/j.cnki.11-2246.2020.0378
[本文引用: 1]
本文基于高速公路高精度点云数据,首先通过点云数据的分类处理实现对树木点云数据的提取,将树木点云投影到水平面,采用DBSCAN密度聚类算法实现单根树木的提取;然后在数据密集区域存在树木树冠点云重叠的区域,本文结合树干几何特征提取树干的位置信息,计算所有点云到树干中心的欧氏距离,将所有点云归类到最近的树干进行粗分割;最后根据粗分割的树木轮廓特征确定树冠模型与树冠中心,提出了采用基于密度特征的格网竞争算法对重叠的区域进行精细分割。试验表明,本文采用的树木分割方法能够实现单棵树木精确提取。
Tree extraction and analysis based on vehicle point cloud data
[J].
DOI:10.13474/j.cnki.11-2246.2020.0378
[本文引用: 1]
This article bases on high-precision point cloud data of highways. Firstly, the point cloud data is extracted through the classification processing of point cloud data, and then the point cloud of the tree is projected to the horizontal plane, and the DBSCAN density clustering algorithm is used to realize the extraction of a single tree. Secondly, there is an area where the tree canopy point cloud overlaps in the data-intensive area. This paper extracts the position information of the trunk and calculates all points by combining the geometric features of the trunk The Euclidean distance froms the cloud to the center of the trunk classifies all point clouds to the nearest trunk for coarse segmentation. Finally, the crown model and crown center are determined based on the rough segmented tree contour features. A grid competition algorithm based on density features is proposed to finely segment the overlapping regions. Experiments show that the tree segmentation method used in this paper can achieve accurate extraction of a single tree.
利用Alpha-shape算法进行树冠三维模型构建
[J].
DOI:10.13474/j.cnki.11-2246.2018.0390
[本文引用: 1]
为了研究树冠三维模型的构建,以常用绿化树种榉树为样本,通过三维激光扫描技术获取点云数据,运用alpha-shape算法进行树冠三维模型构建,并通过调整其α参数,得到不同的三维模型构建效果。结果表明,当参数α取值较大时,构建的三维模型较综合,树冠内部变化无法描述;随着α值的减少,构建的三维模型越来越精细,当减少到一定值时,得到的图形是一些离散的面片,重建结果不完整,不能形成树木模型。利用alpha-shape算法构建的树冠三维模型能够反映出树冠的不同空间形态特征,可作为计算冠层结构参数的基础和依据,深入研究可进一步计算相关结构参数。
Construction of tree crown three-dimensional model using alpha-shape algorithm
[J].
DOI:10.13474/j.cnki.11-2246.2018.0390
[本文引用: 1]
In order to study the method of constructing the three-dimensional model of canopy, in this paper, the point cloud data acquisition platform was a three-dimensional laser scanner (Leica scanstation C10), with a common greening tree Zelkova serrata chosen as an experimental sample. Based on the points cloud of sample tree crowns, the 3D crown models were constructed using the alpha-shape algorithm in the Matlab software with different size value of the parameter-<i>α</i>. The results showed that when larger parameter-<i>α</i> value was employed, the 3D model was more general and the crown internal construction could not be described. With the decrease of the parameter-<i>α</i> value, the 3D model was becoming more and more detailed. When it decreased to a certain lower value, the modeling result became some of discrete graph patches, then the reconstructed results were incomplete and could not form a completed 3D model of the tree crown. The 3D crown model constructed by using the alpha-shape algorithm can reflect the different spatial morphological characteristics of the crown, and can be used as the base for the calculation of crown structural parameters.The results of the study can be used as reference for calculating the related structural parameters in further research work.
Alpha-shape算法构建枣树点云三维模型
[J].
Three-dimensional model construction method and experiment of jujube tree point cloud using Alpha-shape algorithm
[J].

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}